|
42867| 18
|
[项目] 你的,桌面自平衡 机器人—Zz |
本帖最后由 Mingming.Zhang 于 2018-7-19 10:28 编辑  如 何 拥 有 一 台 足 够 把 玩 与 学 习 的 机 器 人 ? 它 集 2 轮 驱 动 、自 平 衡,满 足 机 器 人 的 行 动; 灰 度 巡 线、超 声 波 避 障、oled 128x64 的 图 形 显 示; mpu-6050 模 块 三 轴 加 速 度 + 三 轴 陀 螺 仪,重 心 和 倾 斜 角 测 量; 蓝 牙 无 线 连 接 操 控;当 然 你 还 可 以 附 加 更 多 乐 趣 ,语 音 交 互、 微 型 摄 像 头 配 合 vr 头 盔(fpv 第 一 视 角 驾 驶) 小 小 的 身 躯 —— 清 新 不 油 腻 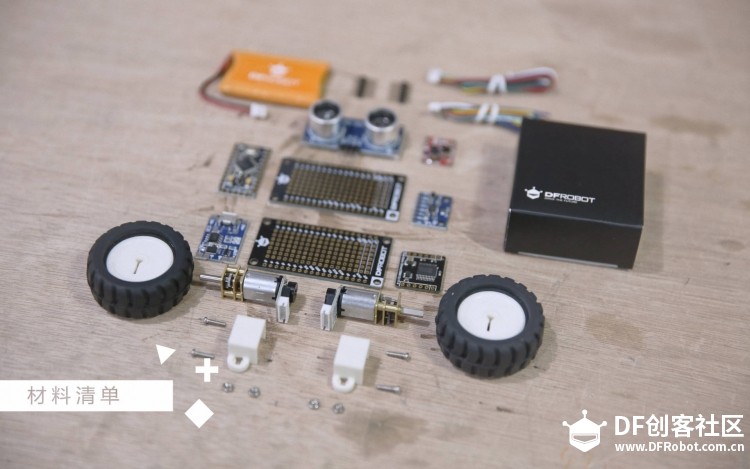 材 料 清 单 : ———————————————— . n20带编码器金属齿轮减速电机V2 (30:1) . miniQ小车橡胶轮 . 3PI MiniQ N20电机支架 . FireBeetle原型扩展板 . TB6612FNG微型双路直流电机驱动模块 . DFRduino Pro Mini V1.2(16M5V328) . 3.7锂电池 . 3v转5v升压模块 . 锂电池充放电模块 ——————————————————— 附加与扩展硬件 . HC-SR04+超声波测距模块 . 灰度巡线传感器 硬 件 篇  Board Power Supply 3.35 -12 V (3.3V model) or 5 - 12 V (5V model) Circuit Operating Voltage 3.3V or 5V (depending on model) 8 MHz (3.3V versions) or 16 MHz (5V versions) Serial: 0 (RX) and 1 (TX). Used to receive (RX) and transmit (TX) TTL serial data. These pins are connected to the TX-0 and RX-1 pins of the six pin header. External Interrupts: 2 and 3. These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attachInterrupt function for details. PWM: 3, 5, 6, 9, 10, and 11. Provide 8-bit PWM output with the analogWrite function. SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication, which, although provided by the underlying hardware, is not currently included in the Arduino language. pro mini作为一款非常小巧的微控制器,大体了解到它的特性(蓝色字体标记)以及工作电压5v(供电是一个项目特别要考虑的指标) 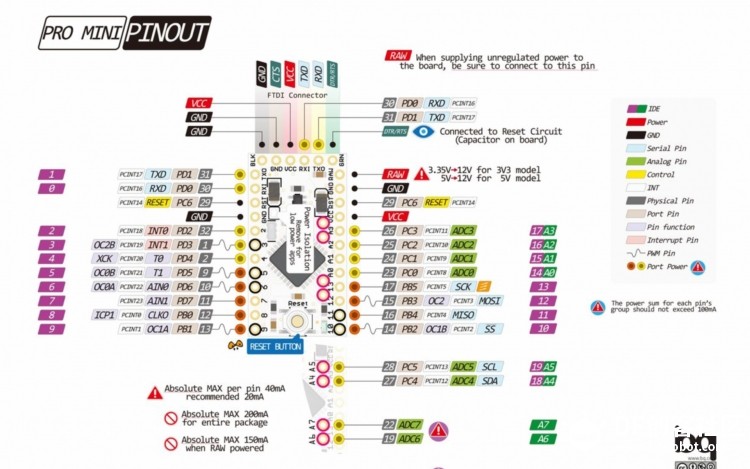 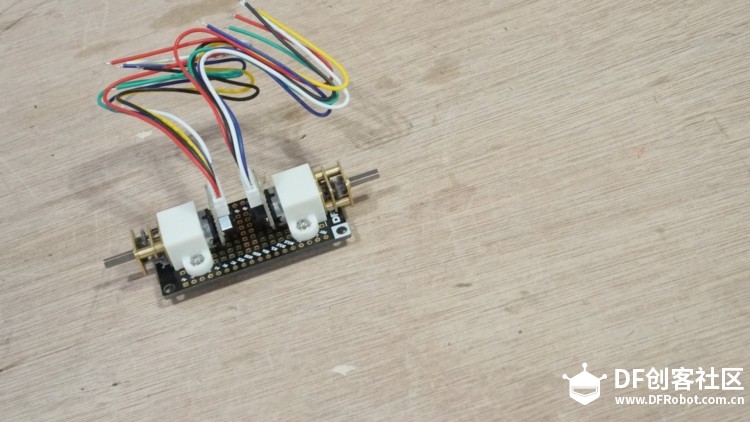 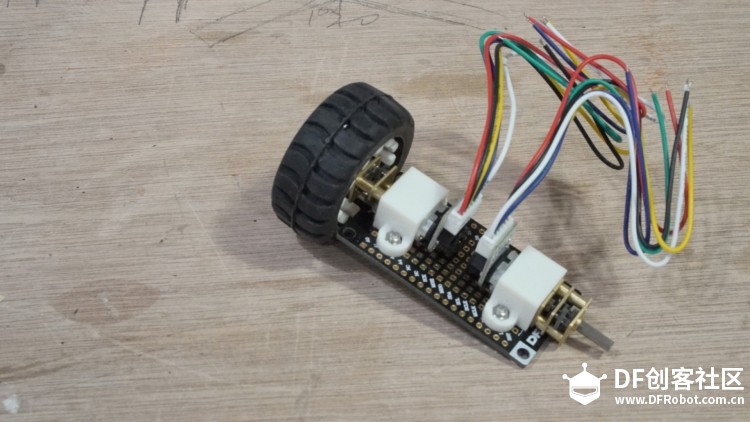 Zz的底盘是一块洞洞板,N20电机的输出轴露出洞洞板外(左右对称); 烧录进代码: [mw_shl_code=c,true]#include "./PinChangeInt.h" #include "./MsTimer2.h" //利用测速码盘计数实现速度PID控制 #include "./BalanceCar.h" #include "./KalmanFilter.h" //I2Cdev、MPU6050和PID_v1类库需要事先安装在Arduino 类库文件夹下 #include "./I2Cdev.h" #include "./MPU6050_6Axis_MotionApps20.h" #include "Wire.h" MPU6050 mpu; //实例化一个 MPU6050 对象,对象名称为 mpu BalanceCar balancecar; KalmanFilter kalmanfilter; int16_t ax, ay, az, gx, gy, gz; //驱动模块控制信号 #define IN1M A3 #define IN2M 7 #define IN3M A0 #define IN4M 8 #define PWMA A2 #define PWMB A1 #define STBY 6 #define PinA_left 3 //中断0 #define PinA_right 2 //中断1 //声明自定义变量 int time; byte inByte; //串口接收字节 int num; double Setpoint; //角度DIP设定点,输入,输出 double Setpoints, Outputs = 0; //速度DIP设定点,输入,输出 double kp = 40, ki = 0.1, kd = 0.3; //需要你修改的参数 double kp_speed =1.8, ki_speed = 0.05, kd_speed = 0; // 需要你修改的参数 double kp_turn = 0, ki_turn = 0, kd_turn = 0; //旋转PID设定 const double PID_Original[6] = {38, 0.0, 0.58,4.0, 0.12, 0.0}; //恢复默认PID参数 //转向PID参数 double setp0 = 0, dpwm = 0, dl = 0; //角度平衡点,PWM差,死区,PWM1,PWM2 float value; //********************angle data*********************// float Q; float Angle_ax; //由加速度计算的倾斜角度 float Angle_ay; float K1 = 0.05; // 对加速度计取值的权重 float angle0 = 0.00; //机械平衡角 int slong; //********************angle data*********************// //***************Kalman_Filter*********************// float Q_angle = 0.001, Q_gyro = 0.005; //角度数据置信度,角速度数据置信度 float R_angle = 0.5 , C_0 = 1; float timeChange = 5; //滤波法采样时间间隔毫秒 float dt = timeChange * 0.001; //注意:dt的取值为滤波器采样时间 //***************Kalman_Filter*********************// //********************************************* //******************** speed count ************ //********************************************* volatile long count_right = 0;//使用volatile lon类型是为了外部中断脉冲计数值在其他函数中使用时,确保数值有效 volatile long count_left = 0;//使用volatile lon类型是为了外部中断脉冲计数值在其他函数中使用时,确保数值有效 int speedcc = 0; //////////////////////脉冲计算///////////////////////// int lz = 0; int rz = 0; int rpluse = 0; int lpluse = 0; int sumam; /////////////////////脉冲计算//////////////////////////// //////////////转向、旋转参数/////////////////////////////// int turncount = 0; //转向介入时间计算 float turnoutput = 0; //////////////转向、旋转参数/////////////////////////////// //////////////Wifi控制量/////////////////// #define run_car '1'//按键前 #define back_car '2'//按键后 #define left_car '3'//按键左 #define right_car '4'//按键右 #define stop_car '0'//按键停 /*小车运行状态枚举*/ enum { enSTOP = 0, enRUN, enBACK, enLEFT, enRIGHT, enTLEFT, enTRIGHT } enCarState; int incomingByte = 0; // 接收到的 data byte String inputString = ""; // 用来储存接收到的内容 boolean newLineReceived = false; // 前一次数据结束标志 boolean startBit = false; //协议开始标志 int g_carstate = enSTOP; // 1前2后3左4右0停止 String returntemp = ""; //存储返回值 boolean g_autoup = false; int g_uptimes = 5000; int front = 0;//前进变量 int back = 0;//后退变量 int turnl = 0;//左转标志 int turnr = 0;//右转标志 int spinl = 0;//左旋转标志 int spinr = 0;//右旋转标志 int bluetoothvalue;//蓝牙控制量 //////////////蓝牙控制量/////////////////// //////////////////超声波速度////////////////// int chaoshengbo = 0; int tingzhi = 0; int jishi = 0; //////////////////超声波速度////////////////// void Code_left(); void Code_right(); //////////////////////脉冲计算/////////////////////// void countpluse() { lz = count_left; rz = count_right; count_left = 0; count_right = 0; lpluse = lz; rpluse = rz; if ((balancecar.pwm1 < 0) && (balancecar.pwm2 < 0)) //小车运动方向判断 后退时(PWM即电机电压为负) 脉冲数为负数 { rpluse = -rpluse; lpluse = -lpluse; } else if ((balancecar.pwm1 > 0) && (balancecar.pwm2 > 0)) //小车运动方向判断 前进时(PWM即电机电压为正) 脉冲数为负数 { rpluse = rpluse; lpluse = lpluse; } else if ((balancecar.pwm1 < 0) && (balancecar.pwm2 > 0)) //小车运动方向判断 前进时(PWM即电机电压为正) 脉冲数为负数 { rpluse = rpluse; lpluse = -lpluse; } else if ((balancecar.pwm1 > 0) && (balancecar.pwm2 < 0)) //小车运动方向判断 左旋转 右脉冲数为负数 左脉冲数为正数 { rpluse = -rpluse; lpluse = lpluse; } //提起判断 balancecar.stopr += rpluse; balancecar.stopl += lpluse; //每5ms进入中断时,脉冲数叠加 balancecar.pulseright += rpluse; balancecar.pulseleft += lpluse; sumam = balancecar.pulseright + balancecar.pulseleft; } ////////////////////脉冲计算/////////////////////// //////////////////角度PD//////////////////// void angleout() { balancecar.angleoutput = kp * (kalmanfilter.angle + angle0) + kd * kalmanfilter.Gyro_x;//PD 角度环控制 } //////////////////角度PD//////////////////// ////////////////////////////////////////////////////////// //////////////////中断定时 5ms定时中断//////////////////// ///////////////////////////////////////////////////////// void inter() { sei(); countpluse(); //脉冲叠加子函数 mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //IIC获取MPU6050六轴数据 ax ay az gx gy gz kalmanfilter.Angletest(ax, ay, az, gx, gy, gz, dt, Q_angle, Q_gyro, R_angle, C_0, K1); //获取angle 角度和卡曼滤波 angleout(); //角度环 PD控制 speedcc++; if (speedcc >= 8) //40ms进入速度环控制 { Outputs = balancecar.speedpiout(kp_speed, ki_speed, kd_speed, front, back, setp0); speedcc = 0; } turncount++; if (turncount > 4) //40ms进入旋转控制 { turnoutput = balancecar.turnspin(turnl, turnr, spinl, spinr, kp_turn, kd_turn, kalmanfilter.Gyro_z); //旋转子函数 turncount = 0; } balancecar.posture++; balancecar.pwma(Outputs, turnoutput, kalmanfilter.angle, kalmanfilter.angle6, turnl, turnr, spinl, spinr, front, back, kalmanfilter.accelz, IN1M, IN2M, IN3M, IN4M, PWMA, PWMB); //小车总PWM输出 } ////////////////////////////////////////////////////////// //////////////////中断定时 5ms定时中断/////////////////// ///////////////////////////////////////////////////////// void SendAutoUp() { g_uptimes --; if ((g_autoup == true) && (g_uptimes == 0)) { //自动上报 String CSB, VT; char temp[10]={0}; float fgx; float fay; float leftspeed; float rightspeed; fgx = gx; //传给局部变量 fay = ay; //传给局部变量 leftspeed = balancecar.pwm1; rightspeed = balancecar.pwm2; double Gx = (double)((fgx - 128.1f) / 131.0f); //角度转换 double Ay = ((double)fay / 16384.0f) * 9.8f; if(leftspeed > 255 || leftspeed < -255) return; if(rightspeed > 255 || rightspeed < -255) return; if((Ay < -20) || (Ay > 20)) return; if((Gx < -3000) || (Gx > 3000)) return; returntemp = ""; memset(temp, 0x00, sizeof(temp)); //sprintf(temp, "%3.1f", leftspeed); dtostrf(leftspeed, 3, 1, temp); // 相當於 %3.2f String LV = temp; memset(temp, 0x00, sizeof(temp)); //sprintf(temp, "%3.1f", rightspeed); dtostrf(rightspeed, 3, 1, temp); // 相當於 %3.1f String RV = temp; memset(temp, 0x00, sizeof(temp)); //sprintf(temp, "%2.2f", Ay); dtostrf(Ay, 2, 2, temp); // 相當於 %2.2f String AC = temp; memset(temp, 0x00, sizeof(temp)); //sprintf(temp, "%4.2f", Gx); dtostrf(Gx, 4, 2, temp); // 相當於 %4.2f String GY = temp; CSB = "0.00"; VT = "0.00"; //AC = returntemp = "$LV" + LV + ",RV" + RV + ",AC" + AC + ",GY" + GY + ",CSB" + CSB + ",VT" + VT + "#"; Serial.print(returntemp); //返回协议数据包 } if (g_uptimes == 0) g_uptimes = 5000; } // === 初始设置 === void setup() { // TB6612FNGN驱动模块控制信号初始化 pinMode(IN1M, OUTPUT); //控制电机1的方向,01为正转,10为反转 pinMode(IN2M, OUTPUT); pinMode(IN3M, OUTPUT); //控制电机2的方向,01为正转,10为反转 pinMode(IN4M, OUTPUT); pinMode(PWMA, OUTPUT); //左电机PWM pinMode(PWMB, OUTPUT); //右电机PWM pinMode(STBY, OUTPUT); //TB6612FNG使能 //初始化电机驱动模块 digitalWrite(IN1M, 0); digitalWrite(IN2M, 1); digitalWrite(IN3M, 1); digitalWrite(IN4M, 0); digitalWrite(STBY, 1); analogWrite(PWMA, 0); analogWrite(PWMB, 0); pinMode(PinA_left, INPUT); //测速码盘输入 pinMode(PinA_right, INPUT); // 加入I2C总线 Wire.begin(); //加入 I2C 总线序列 Serial.begin(9600); //开启串口,设置波特率为 115200 delay(1500); mpu.initialize(); //初始化MPU6050 delay(2); balancecar.pwm1 = 0; balancecar.pwm2 = 0; //5ms定时中断设置 使用timer2 注意:使用timer2会对pin3 pin11的PWM输出有影响,因为PWM使用的是定时器控制占空比,所以在使用timer的时候要注意查看对应timer的pin口。 MsTimer2::set(5, inter); MsTimer2::start(); } ////////////////////////////////////////turn////////////////////////////////// void ResetPID() { kp = PID_Original[0]; ki = PID_Original[1]; kd = PID_Original[2]; //需要你修改的参数 kp_speed = PID_Original[3]; ki_speed = PID_Original[4]; kd_speed = PID_Original[5]; // 需要你修改的参数 } void ResetCarState() { turnl = 0; turnr = 0; front = 0; back = 0; spinl = 0; spinr = 0; turnoutput = 0; } // === 主循环程序体 === void loop() { String returnstr = "$0,0,0,0,0,0,0,0,0,0,0,0cm,8.2V#"; //默认发送 //主函数中循环检测及叠加脉冲 测定小车车速 使用电平改变既进入脉冲叠加 增加电机的脉冲数,保证小车的精确度。 attachInterrupt(0, Code_left, CHANGE); attachPinChangeInterrupt(PinA_right, Code_right, CHANGE); //kongzhi(); //蓝牙接口 // //Serial.println(kalmanfilter.angle); //Serial.print("\t"); //Serial.print(bluetoothvalue); //Serial.print("\t"); // Serial.print( balancecar.angleoutput); // Serial.print("\t"); // Serial.print(balancecar.pwm1); // Serial.print("\t"); // Serial.println(balancecar.pwm2); // Serial.print("\t"); // Serial.println(balancecar.stopr); // Serial.print("\t"); if (newLineReceived) { switch (inputString[1]) { case run_car: g_carstate = enRUN; break; case back_car: g_carstate = enBACK; break; case left_car: g_carstate = enLEFT; break; case right_car: g_carstate = enRIGHT; break; case stop_car: g_carstate = enSTOP; break; default: g_carstate = enSTOP; break; } //判断协议是否有丢包 /* if(inputString.length() < 21) { //恢复默认 inputString = ""; // clear the string newLineReceived = false; //Serial.print(returnstr); goto a; }*/ if (inputString[3] == '1' && inputString.length() == 21) //左摇 { g_carstate = enTLEFT; //Serial.print(returnstr); } else if (inputString[3] == '2' && inputString.length() == 21) //右摇 { g_carstate = enTRIGHT; // Serial.print(returnstr); } if (inputString[5] == '1') //查询PID { char charkp[7], charkd[7], charkpspeed[7], charkispeed[7]; dtostrf(kp, 3, 2, charkp); // 相當於 %3.2f dtostrf(kd, 3, 2, charkd); // 相當於 %3.2f dtostrf(kp_speed, 3, 2, charkpspeed); // 相當於 %3.2f dtostrf(ki_speed, 3, 2, charkispeed); // 相當於 %3.2f String strkp = charkp; String strkd = charkd; String strkpspeed = charkpspeed; String strkispeed = charkispeed; returntemp = "$0,0,0,0,0,0,AP" + strkp + ",AD" + strkd + ",VP" + strkpspeed + ",VI" + strkispeed + "#"; Serial.print(returntemp); //返回协议数据包 } else if (inputString[5] == '2') //恢复PID { ResetPID(); Serial.print("$OK#"); //返回协议数据包 } if (inputString[7] == '1') //自动上报 { g_autoup = true; Serial.print("$OK#"); //返回协议数据包 } else if (inputString[7] == '2') //停止自动上报 { g_autoup = false; Serial.print("$OK#"); //返回协议数据包 } if (inputString[9] == '1') //角度环更新 $0,0,0,0,1,1,AP23.54,AD85.45,VP10.78,VI0.26# { int i = inputString.indexOf("AP"); int ii = inputString.indexOf(",", i); if(ii > i) { String m_skp = inputString.substring(i + 2, ii); m_skp.replace(".", ""); int m_kp = m_skp.toInt(); kp = (double)( (double)m_kp / 100.0f); } i = inputString.indexOf("AD"); ii = inputString.indexOf(",", i); if(ii > i) { //ki = inputString.substring(i+2, ii); String m_skd = inputString.substring(i + 2, ii); m_skd.replace(".", ""); int m_kd = m_skd.toInt(); kd = (double)( (double)m_kd / 100.0f); } Serial.print("$OK#"); //返回协议数据包 } if (inputString[11] == '1') //速度环更新 { int i = inputString.indexOf("VP"); int ii = inputString.indexOf(",", i); if(ii > i) { String m_svp = inputString.substring(i + 2, ii); m_svp.replace(".", ""); int m_vp = m_svp.toInt(); kp_speed = (double)( (double)m_vp / 100.0f); } i = inputString.indexOf("VI"); ii = inputString.indexOf("#", i); if(ii > i) { String m_svi = inputString.substring(i + 2, ii); m_svi.replace(".", ""); int m_vi = m_svi.toInt(); ki_speed = (double)( (double)m_vi / 100.0f); Serial.print("$OK#"); //返回协议数据包 } } //恢复默认 inputString = ""; // clear the string newLineReceived = false; } a: switch (g_carstate) { case enSTOP: turnl = 0; turnr = 0; front = 0; back = 0; spinl = 0; spinr = 0; turnoutput = 0; break; case enRUN: ResetCarState();front = 250; break; case enLEFT: turnl = 1; break; case enRIGHT: turnr = 1; break; case enBACK: ResetCarState();back = -250; break; case enTLEFT: spinl = 1; break; case enTRIGHT: spinr = 1; break; default: front = 0; back = 0; turnl = 0; turnr = 0; spinl = 0; spinr = 0; turnoutput = 0; break; } //增加自动上报 SendAutoUp(); } ////////////////////////////////////////pwm/////////////////////////////////// //////////////////////////脉冲中断计算///////////////////////////////////// void Code_left() { count_left ++; } //左测速码盘计数 void Code_right() { count_right ++; } //右测速码盘计数 //////////////////////////脉冲中断计算///////////////////////////////////// //serialEvent()是IDE1.0及以后版本新增的功能,不清楚为什么大部份人不愿意用,这个可是相当于中断功能一样的啊! int num1 = 0; void serialEvent() { while (Serial.available()) { incomingByte = Serial.read(); //一个字节一个字节地读,下一句是读到的放入字符串数组中组成一个完成的数据包 if (incomingByte == '$') { num1 = 0; startBit = true; } if (startBit == true) { num1++; inputString += (char) incomingByte; // 全双工串口可以不用在下面加延时,半双工则要加的// } if (startBit == true && incomingByte == '#') { newLineReceived = true; startBit = false; } if(num1 >= 80) { num1 = 0; startBit = false; newLineReceived = false; inputString = ""; } } } /*备份*/ #if 0 char chartemp[7]; dtostrf(ax, 3, 2, chartemp); // 相當於 %3.2f String strax = chartemp; strax = "\nax:" + strax; memset(chartemp, 0x00, 7); dtostrf(ay, 3, 2, chartemp); // 相當於 %3.2f String stray = chartemp; stray = "\nay:" + stray; memset(chartemp, 0x00, 7); dtostrf(az, 3, 2, chartemp); // 相當於 %3.2f String straz = chartemp; straz = "\naz:" + straz; memset(chartemp, 0x00, 7); dtostrf(gx, 3, 2, chartemp); // 相當於 %3.2f String strgx = chartemp; strgx = "\ngx:" + strgx; memset(chartemp, 0x00, 7); dtostrf(gy, 3, 2, chartemp); // 相當於 %3.2f String strgy = chartemp; strgy = "\ngy:" + strgy; memset(chartemp, 0x00, 7); dtostrf(gz, 3, 2, chartemp); // 相當於 %3.2f String strgz = chartemp; strgz = "\ngz:" + strgz; Serial.print(strax + stray + straz + strgx + strgy + strgz); //返回协议数据包 #endif [/mw_shl_code] 完成! |
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶















