|
1518| 4
|
[项目] 【花雕动手做】CanMV K230 AI 视觉识别模块之颜色识别 |
 什么是 CanMV K230? CanMV K230是一款高性价比的RISC-V边缘AI平台,凭借低功耗、强视觉处理能力和开放的开发生态,成为嵌入式AI开发的理想选择,尤其适合需要快速部署视觉与AI功能的创客、中小企业及教育场景。CanMV 是一套 AI 视觉开发平台,K230 是其核心芯片。该模块结合了图像采集、AI推理、边缘计算等能力,适合嵌入式视觉应用开发。 CanMV:类似 OpenMV 的图像处理框架,支持 Python 编程,简化视觉识别开发流程。 K230 芯片:嘉楠科技推出的 AIoT SoC,采用 RISC-V 架构,内置第三代 KPU(AI加速单元),算力高达 6 TOPS,性能是 K210 的 13.7 倍。  |
|
知识点 颜色识别是计算机视觉中基于像素色彩特征的基础任务,核心是从图像中筛选出特定颜色的区域(如红色路标、绿色零件),通过 “颜色空间转换 + 阈值分割” 实现,适配简单场景的快速识别,也是巡线、物体分类等任务的基础。 1、核心原理 颜色识别的关键是 “用合适的颜色空间描述颜色,并通过阈值筛选目标颜色”,核心逻辑: 颜色空间转换:将图像从默认的 RGB 空间,转换为更适合颜色分割的空间(如 HSV、HSL),减少光照变化的影响。 阈值设定:在目标颜色空间中,定义目标颜色的范围(如 HSV 中红色的 hue、saturation、value 区间)。 阈值分割:筛选出颜色落在目标范围内的像素,生成二值掩码(目标区域为白色,其他为黑色)。 后处理:通过形态学操作优化掩码,提取目标区域的轮廓或位置。 2、主流颜色空间(按实用性分类)  3、实操示例(OpenCV+HSV 颜色识别,适配 K230) HSV 空间抗干扰性最优,以下代码支持实时识别单一颜色(以红色为例),可直接替换为其他颜色: python 4、关键优化技巧(提升识别鲁棒性) (1)阈值校准: 实际场景中,用 “阈值调试工具” 获取精准 HSV 范围(代码如下),适配环境光照: python (2)光照适应: 降低 S 通道阈值下限(如 120→80),适配低饱和度场景;提高 V 通道范围(如 70-255),兼容明暗变化。 对图像进行直方图均衡化(针对亮度通道),减少光照不均的影响。 (3)后处理强化: 用 “开运算”(先腐蚀后膨胀)去除小噪声,“闭运算”(先膨胀后腐蚀)修复目标区域的孔洞。 筛选轮廓面积和宽高比,排除形状不符的干扰区域(如识别红色零件时,过滤细长的红色杂点)。 (4)K230 平台适配: 用 NPU 加速颜色空间转换和阈值分割,CPU 负责轮廓提取,单帧延迟可降至 50ms 内。 通过 ISP 模块调整摄像头曝光参数,避免过亮或过暗导致颜色失真。 5、典型应用场景 巡线机器人:识别特定颜色的赛道标线(如黑色背景上的白色、红色标线)。 工业质检:筛选特定颜色的零件(如红色合格产品、蓝色不合格产品)。 智能分拣:机器人识别不同颜色的物品,进行分类分拣(如快递包裹、水果)。 交通标志识别:识别红色警告标志、黄色警示标志等。    |
|
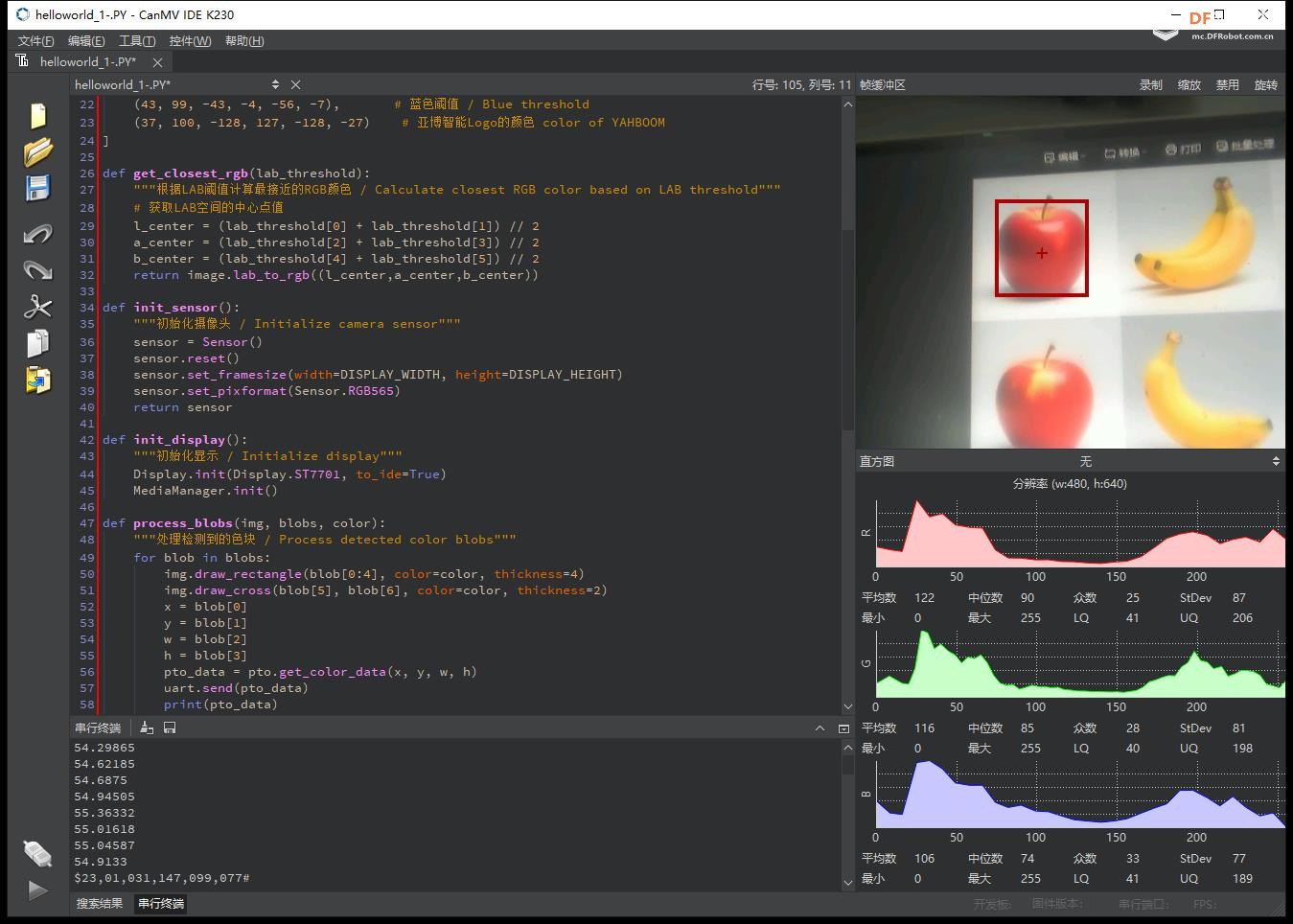
【花雕动手做】CanMV K230 AI 视觉识别模块之颜色识别 项目测试实验代码 |
|
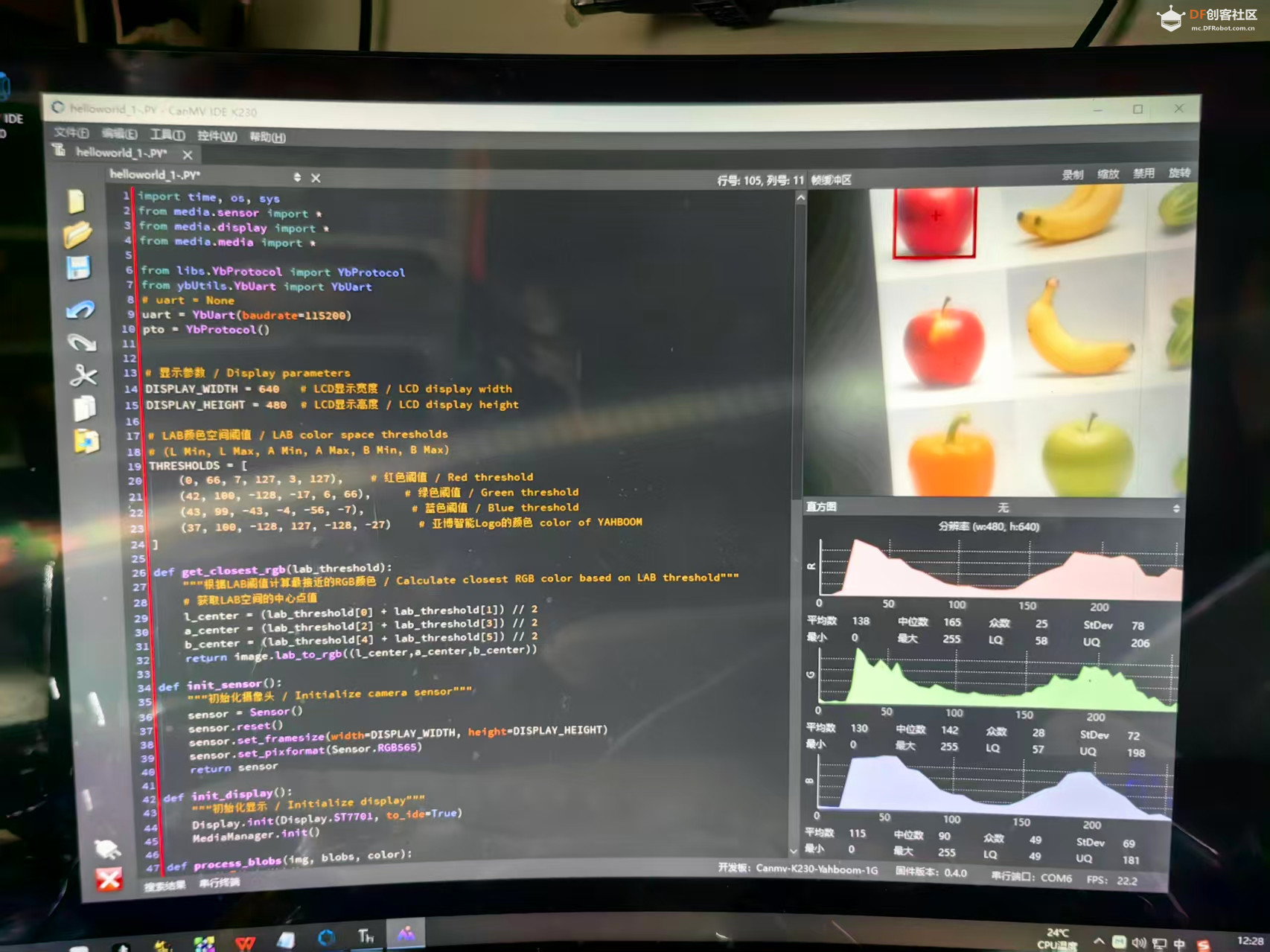
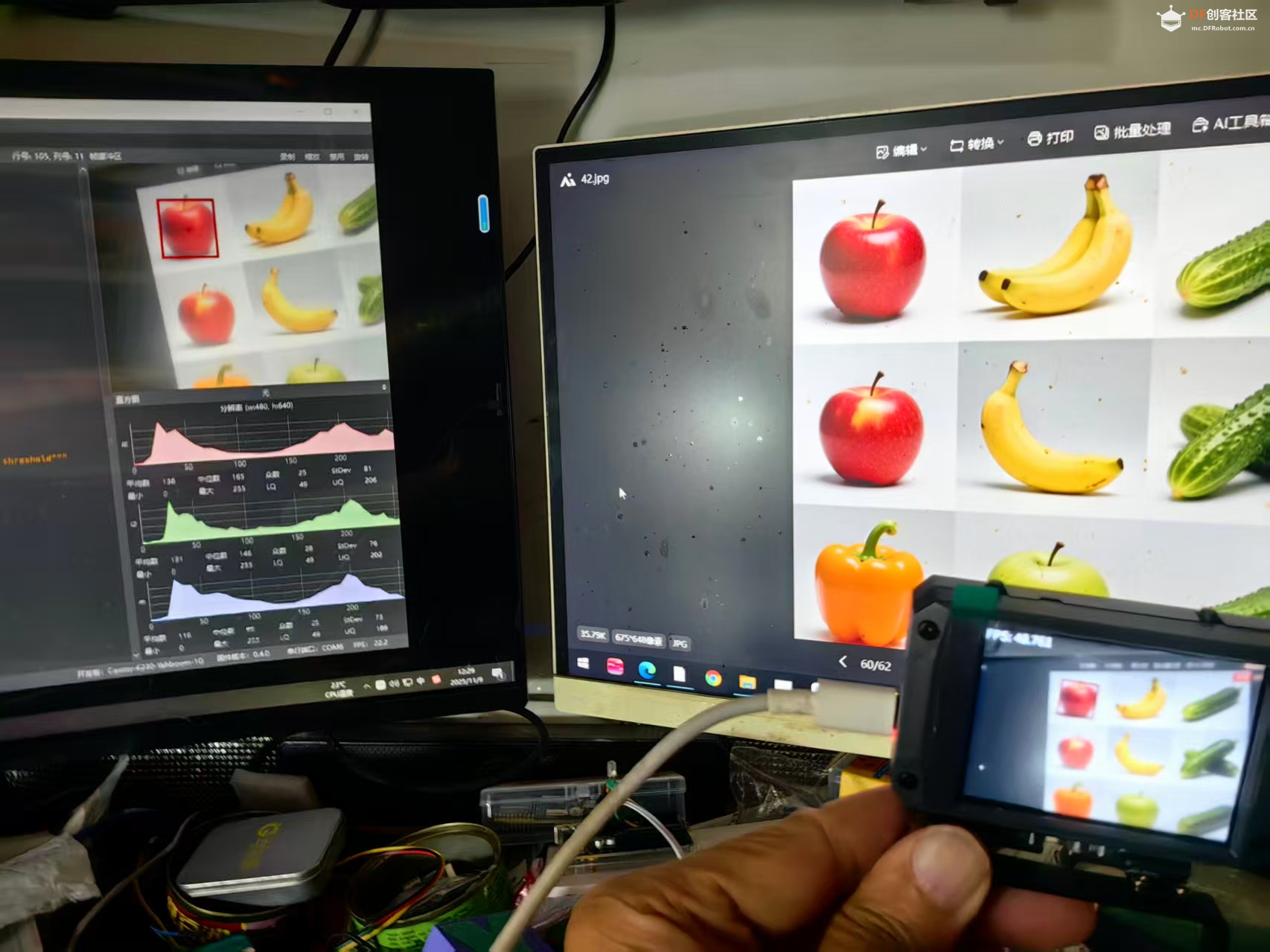
程序功能解读 核心功能:实时颜色识别与通信 颜色检测:基于LAB颜色空间的色块识别 视觉反馈:在图像上标记检测到的色块 串口通信:将检测结果通过UART发送给其他设备 性能监控:实时显示处理帧率 技术架构分析 1. LAB颜色空间优势 python LAB颜色空间特点: L通道:亮度,0-100 A通道:红绿色度,-128到+127 B通道:黄蓝色度,-128到+127 优势:比RGB更接近人类视觉感知,对光照变化不敏感 2. 串口通信系统 python 通信流程: text 颜色检测 → 数据封装 → 串口发送 → 外部设备接收 3. 色块检测算法 python 参数说明: area_threshold=5000:最小面积5000像素,过滤噪声 merge=True:合并相邻色块,避免碎片化 返回的blob包含:[x, y, width, height, cx, cy] 性能优化特性 1. 智能色块处理 python 提高处理效率,避免处理过多色块 适合主要目标追踪场景 2. 实时性能监控 python 持续监控系统性能 为算法优化提供数据支持 算法工作流程 实时处理流水线 text 图像采集 → LAB颜色空间转换 → 色块检测 → 轮廓绘制 → 数据封装 → 串口发送 → 结果显示 颜色识别详细流程 图像获取:摄像头捕获RGB565格式图像 颜色转换:内部转换为LAB颜色空间 阈值分割:根据预设LAB范围分割图像 连通域分析:找到符合条件的色块区域 特征提取:计算位置、大小、中心点 可视化:绘制边框和中心标记 通信:封装数据并通过串口发送 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶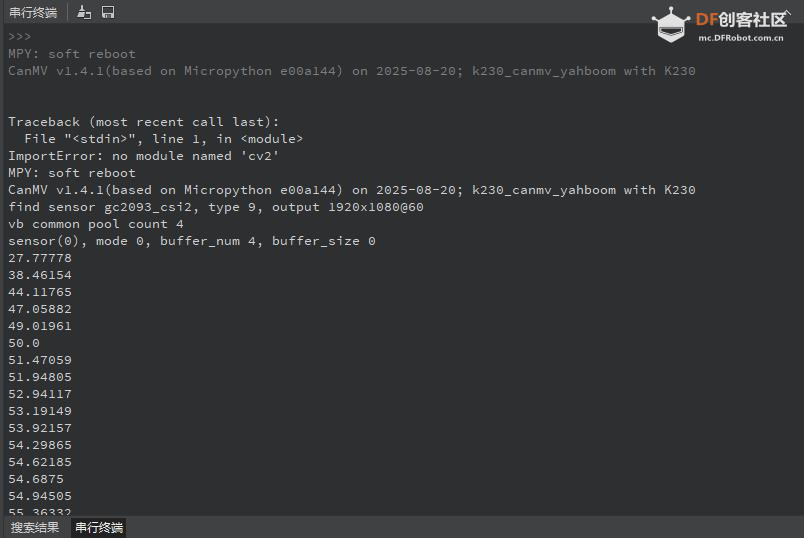


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






