|
2267| 3
|
[漂移驴车项目] 【漂移驴车】全新拿铁熊猫硬件架构-系统环境搭建(1) |

|
漂移驴车从成立到现在,经历起起伏伏好多年,当初是树莓派,然后是lattepanda 一代,接着是lattepanda 3 delta, 现在迎来了lattepanda MU, 我们的驴车不断见证着lattepanda的发展,设备也是越来越精致。从原先的一整板,到现在的片上核心模组,一代代的变化让人有无限遐想。 趁着LP MU价格没涨的时候,我从大佬昊男手里买过一片,现在就以非常激动的心情给大家分享一下我的使用心得。 1. 什么是Lattepanda MU ? 你就理解成一个X86的核心板,能够跑windows,Linux系统的非常强大的主机就行。  特性: 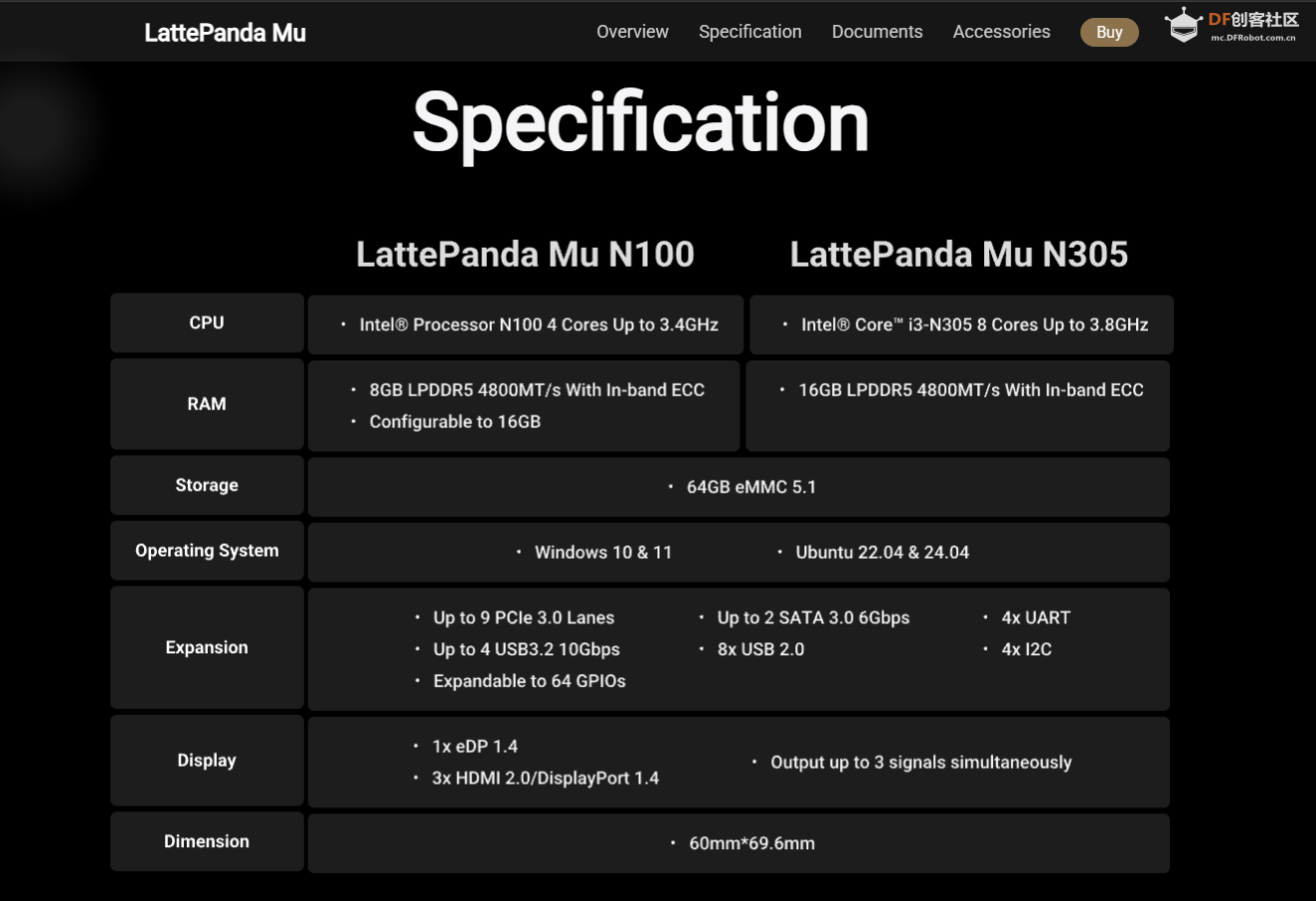  官方支持的系统就很棒,能够做很多应用了。 我比较喜欢linux,所以我决定安装Ubuntu 25.04, 虽然25.10也已经发布了,我还是觉得25.04 先试试,没问题再换最新的。  、 、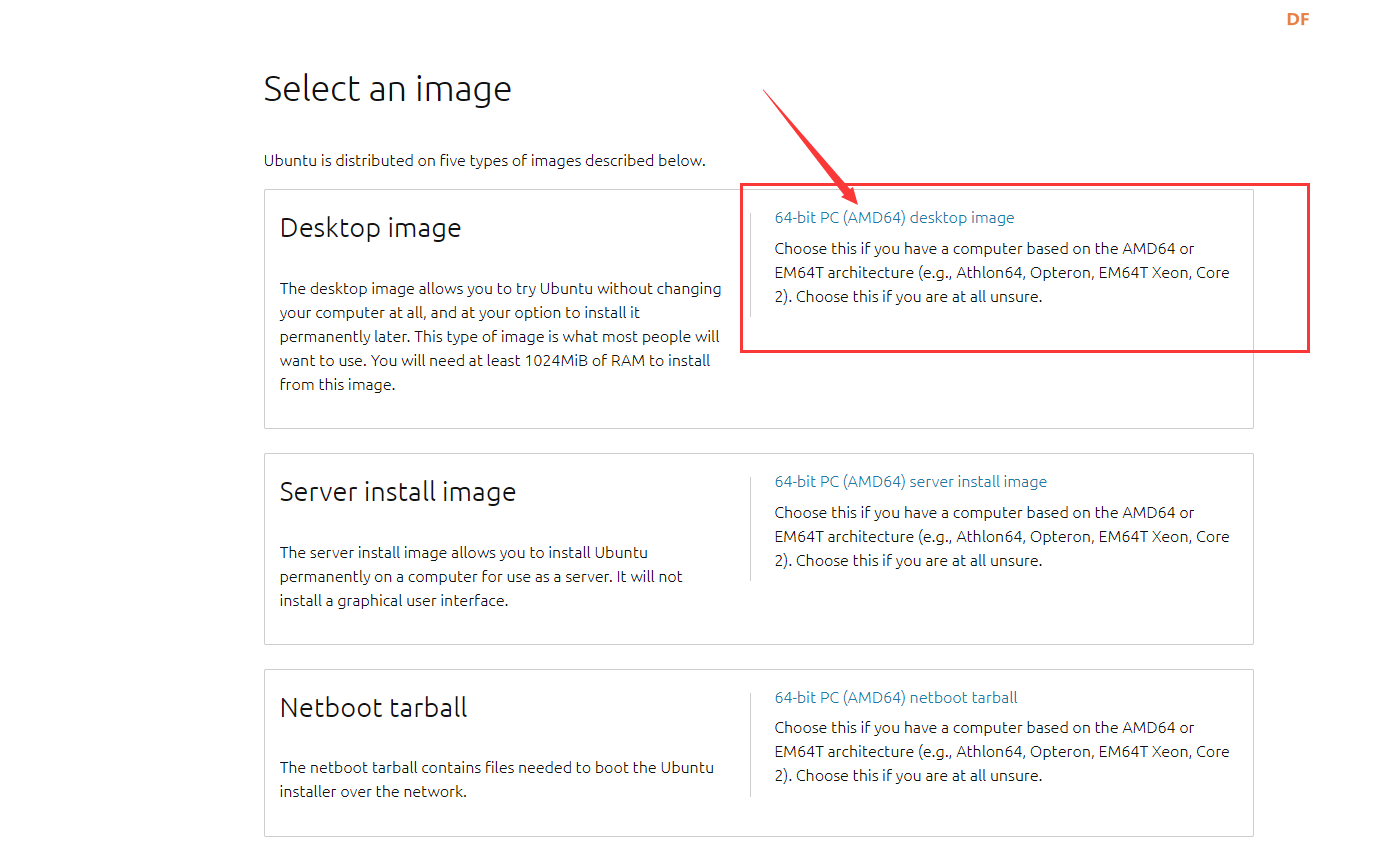 使用的方法非常简单。 1. 找一个U盘或者SD卡,8GB朝上的容量就够。 2. 下载ubuntu官方系统镜像文件 我是从这里下载的:https://releases.ubuntu.com/25.04/  然后用一个叫rufus的工具将镜像烧录到SD卡或者U盘,我是用32GB的SD卡烧录的。 所以用了个读卡器。 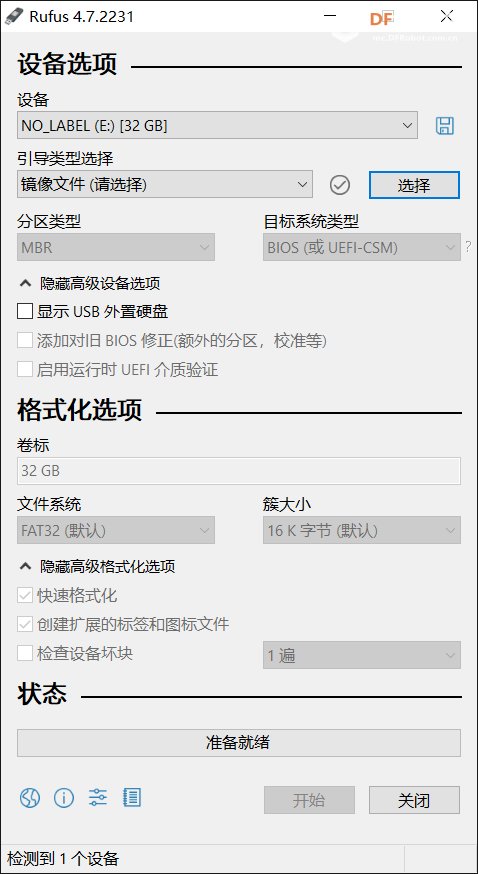 然后打开rufus后如下: 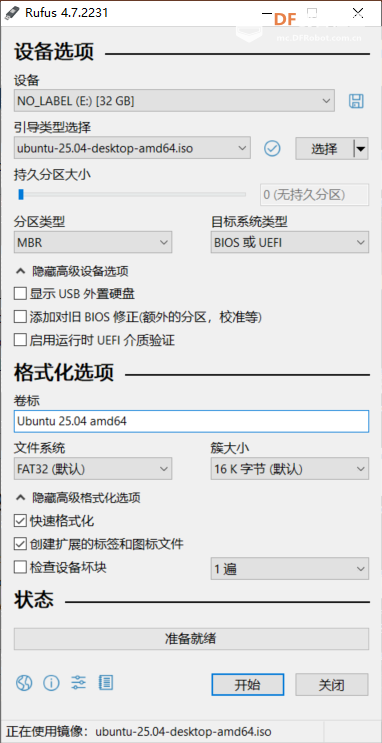 选择镜像到你下载的镜像文件就可以了,其他的部分都不用动。 然后点开始就可以等待完成了。 是不是简单到无法无天?  默认一路ok就行。 基本上实现的方法就是将镜像烧录到SD卡,然后通过读卡器插入到 lattepanda MU 的IO扩展板上,如果没有这个IO扩展板,你的这个核心模块很难工作, 除非你有我们制作的驴车底板,所以还是有点儿门槛。。 趁着烧录的过程,我们来拆箱我的mu主板。。。  背面:  侧面  说明书: 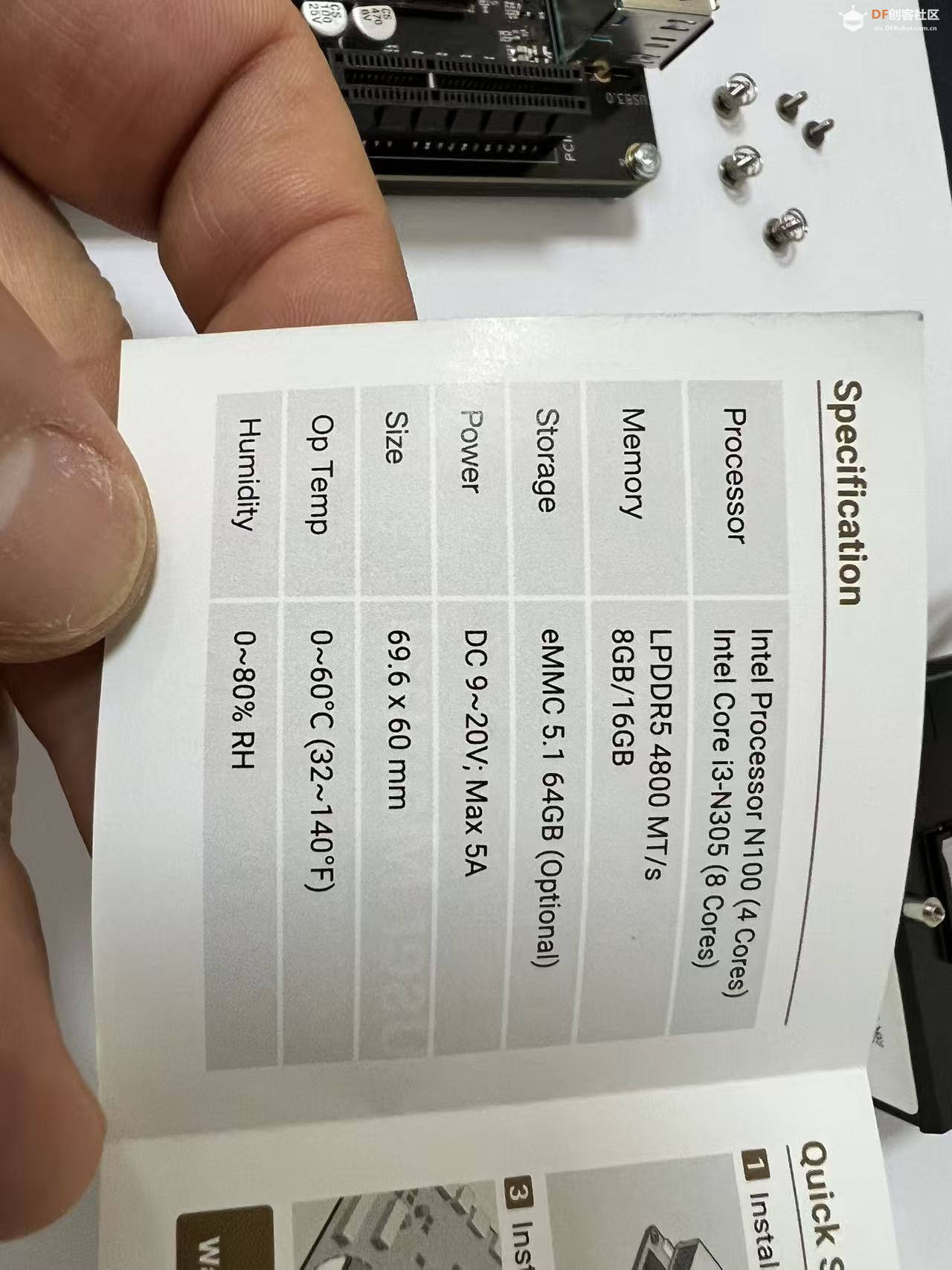 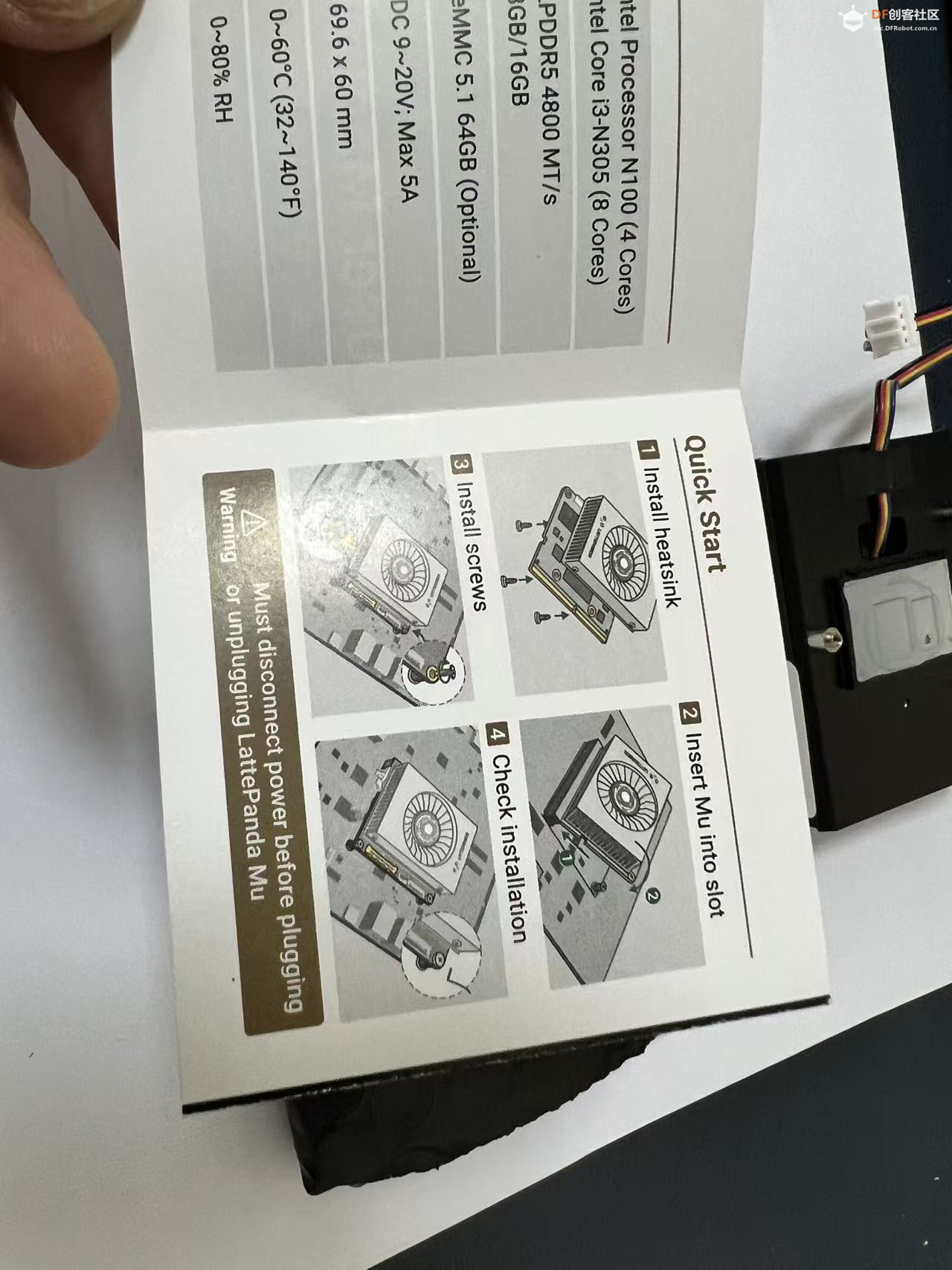 背面安装风扇的孔:  我迫不及待的安装了散热器,官方散热器太帅了,我喜欢这个涡轮造型,看上去就cool~ 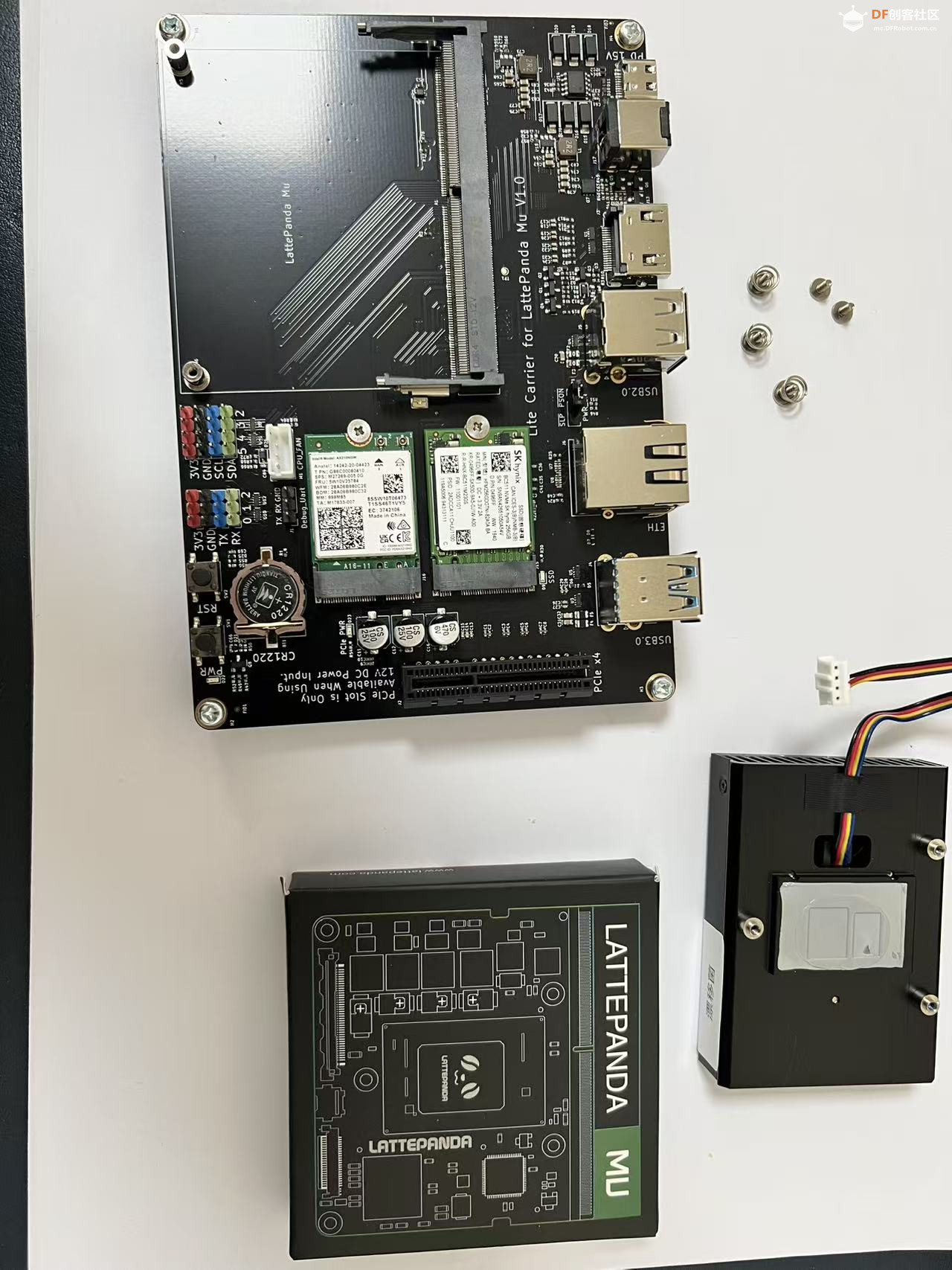  接着我要祭出我的官方底板,我想先烧录程序调试好放驴车上。 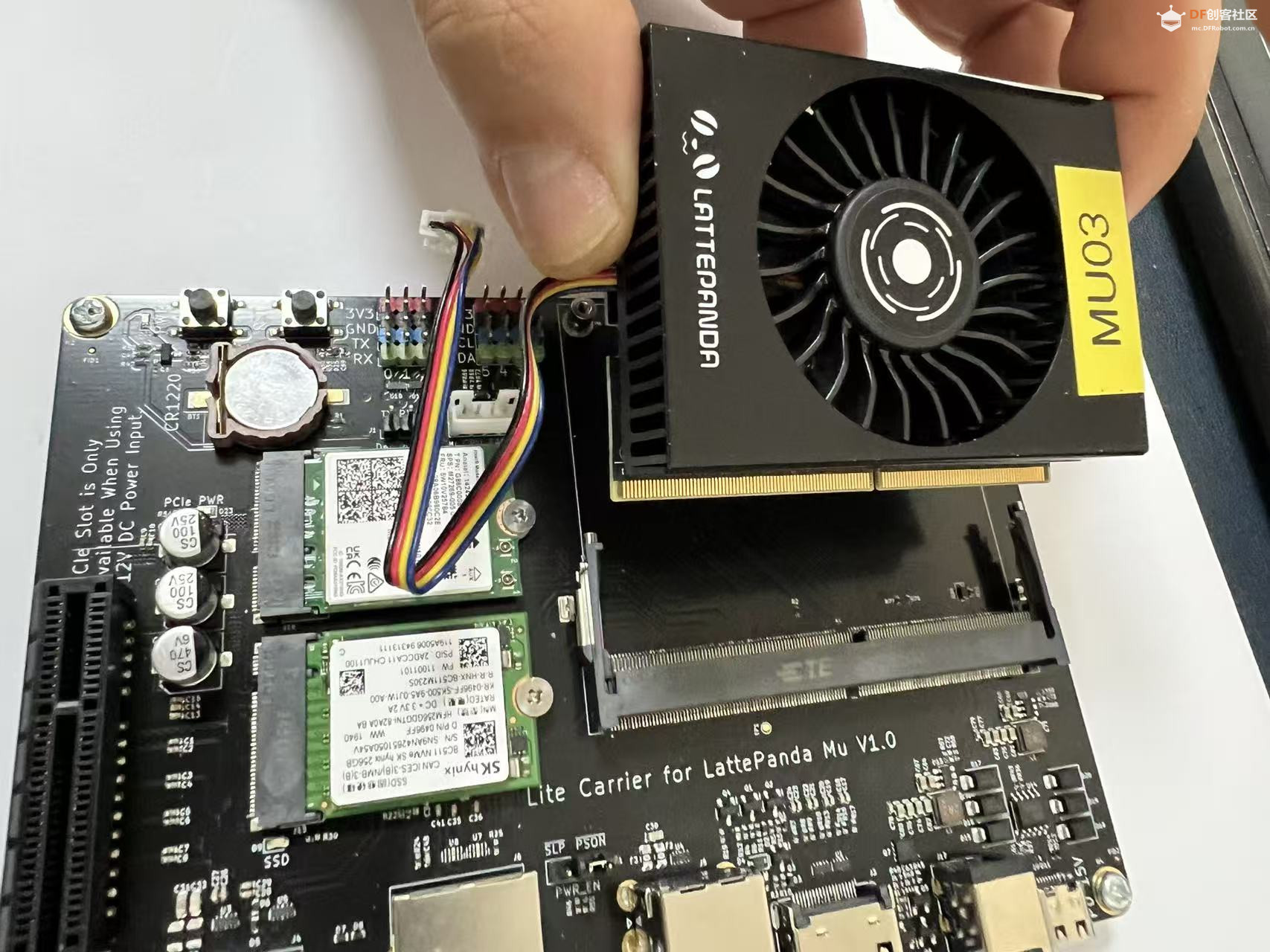  安装好了就这样: 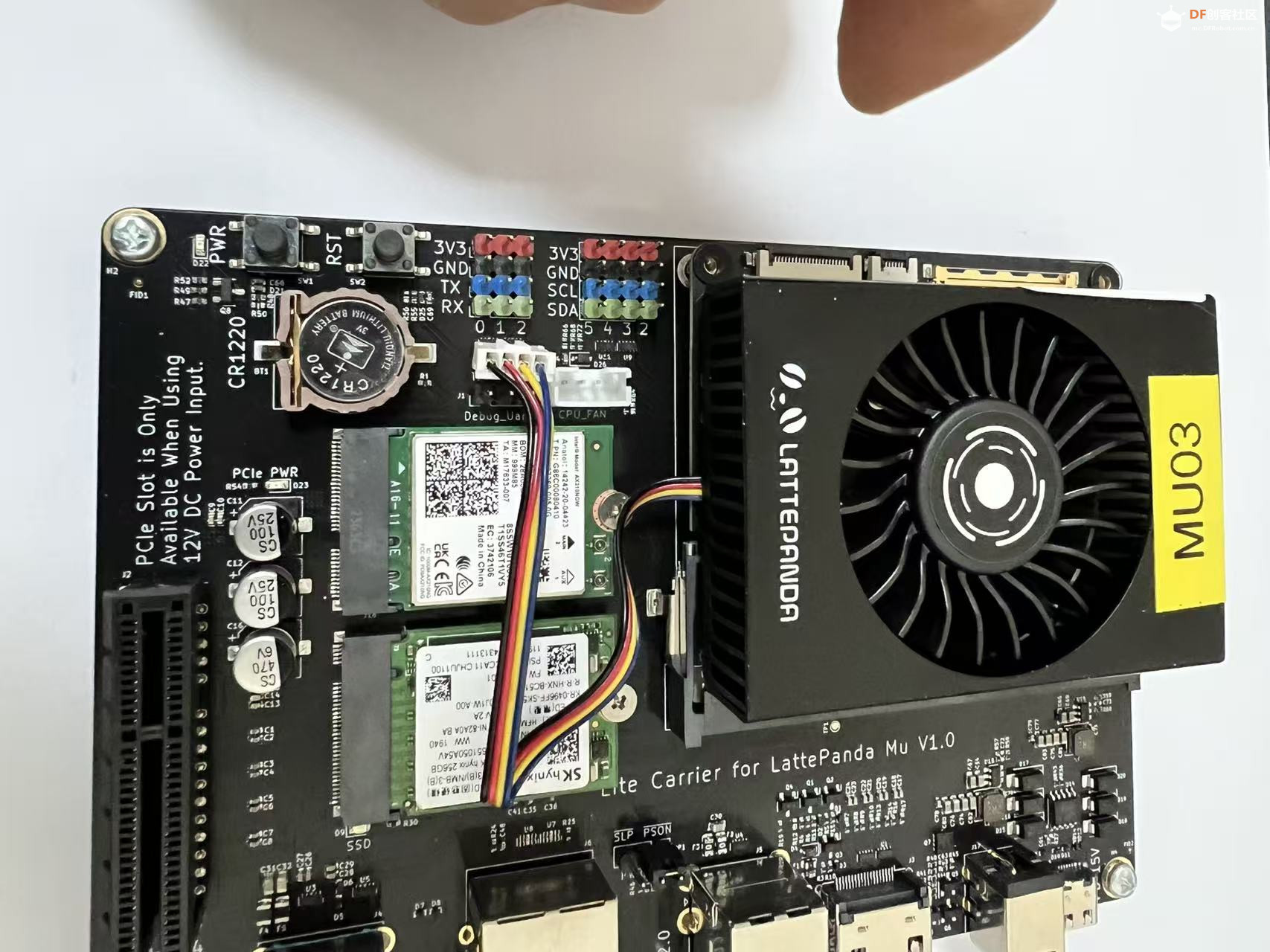 这里有个银锌电池CR1220 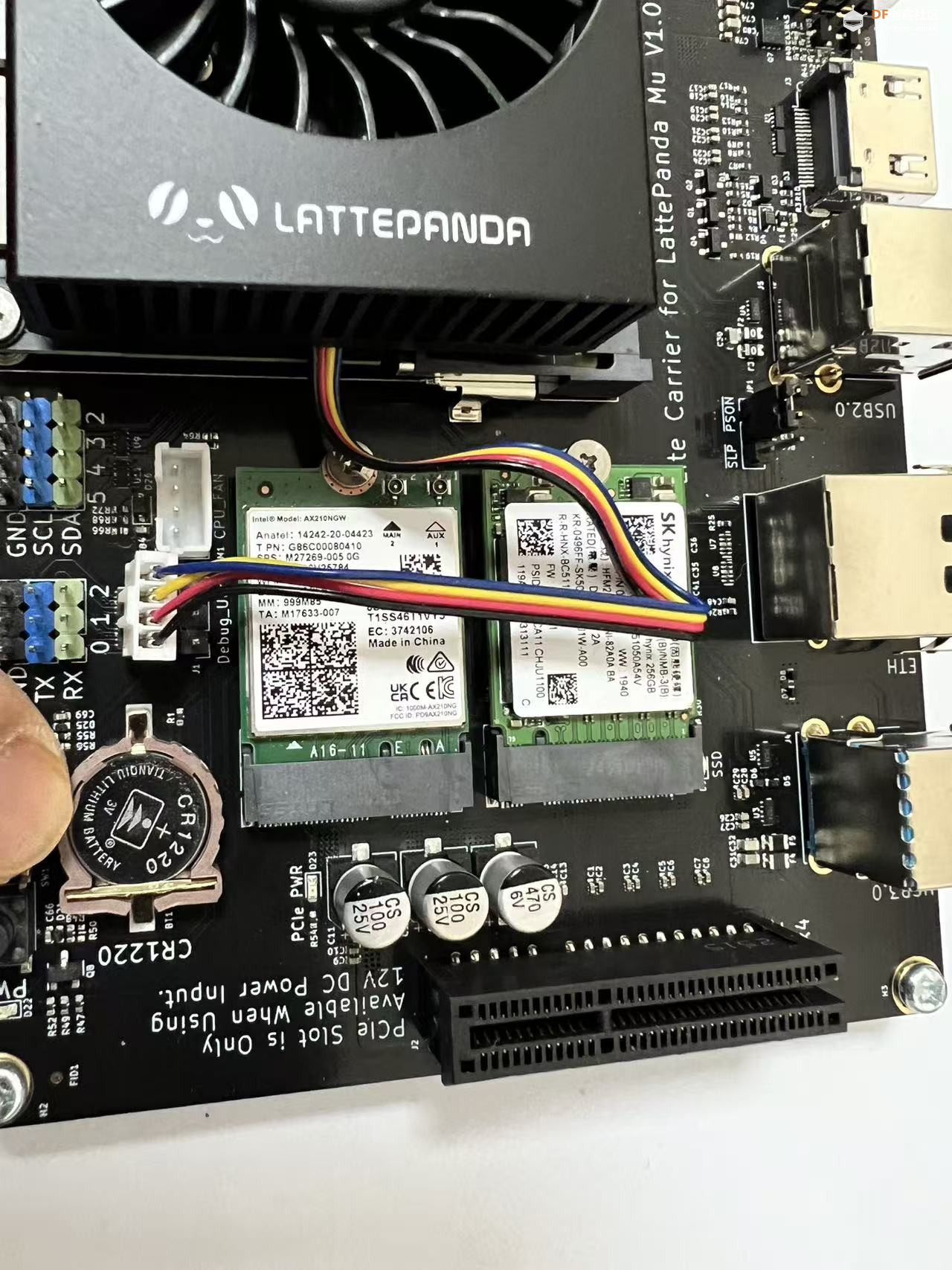 插入风扇电源和信号线。 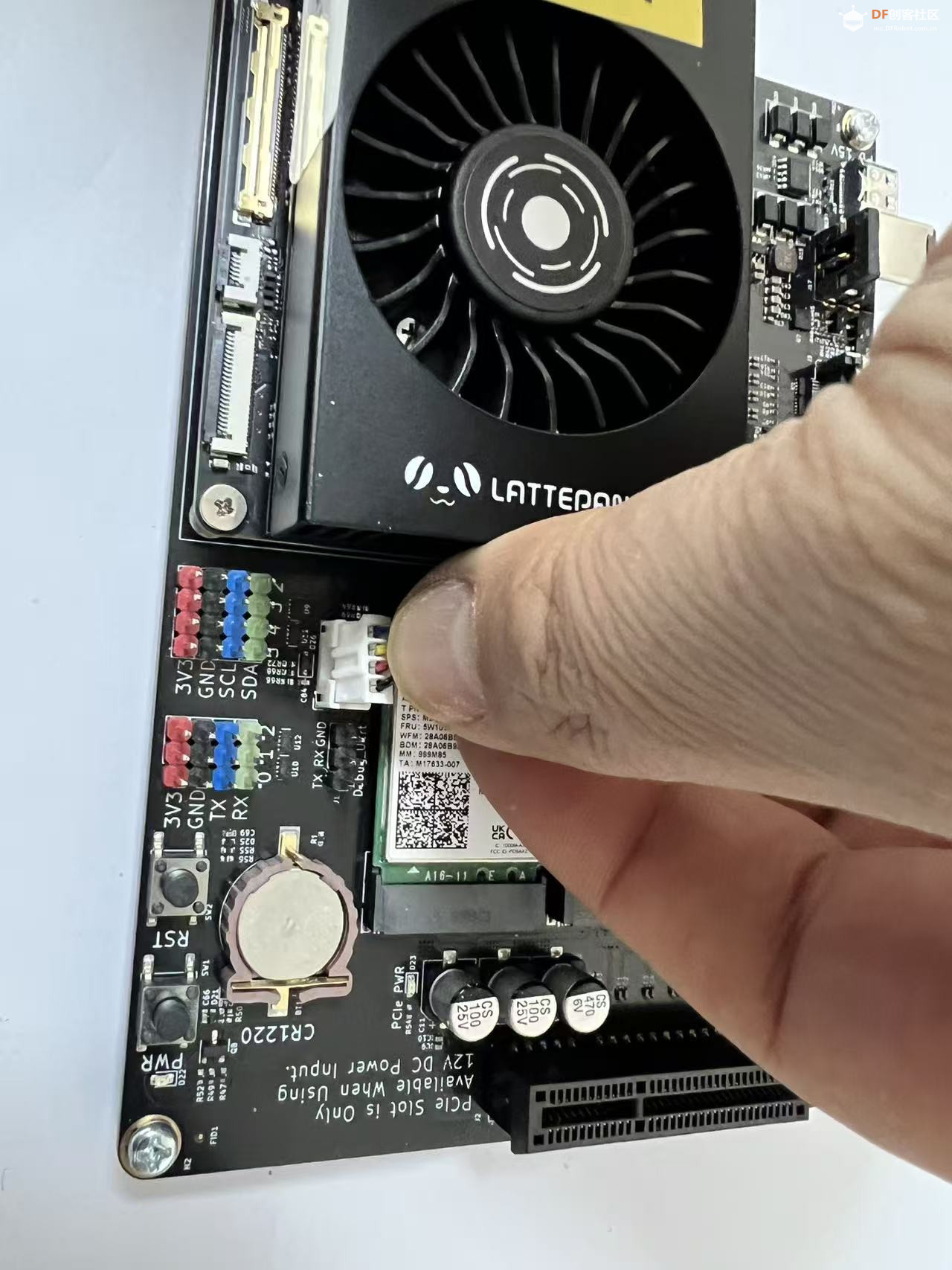 防呆设置非常不错!  而官方底板上,我购买了Intel 的AX210NGW 网卡,还有昊男送的一片SKhynix的256GB的SSD, 规格2230 ,M.2 M-key 接口的, 又小巧,又可爱。安装上去整整齐齐。哈哈 安装核心板,45度角插入, 并锁紧。 按下的时候会咔哒一声卡住。 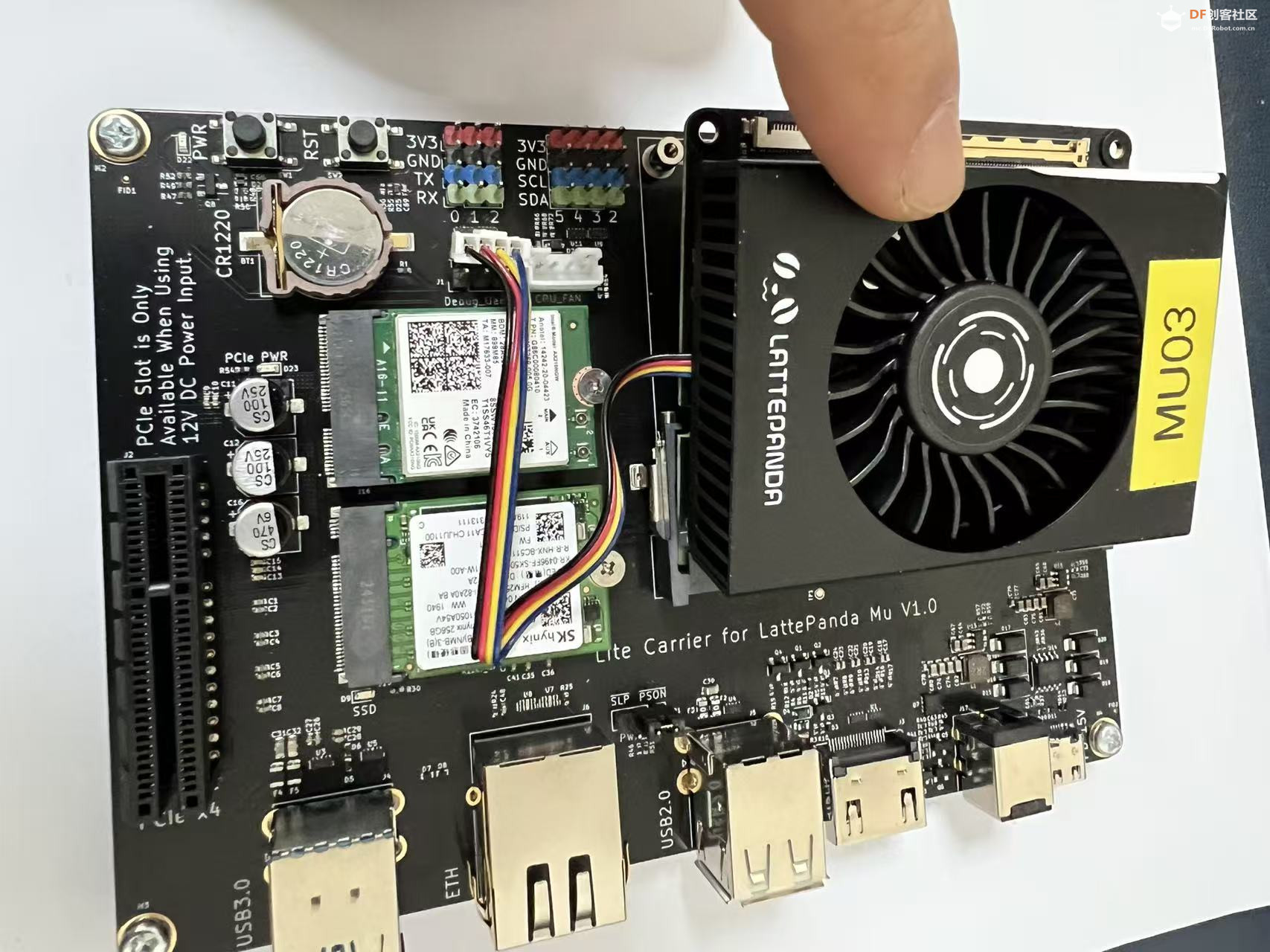 然后他就安静的停留在IO扩展板上了。 接着我们用螺丝固定一下,这个螺丝我用了两个平头的M2.5的螺丝固定的。为了防止和别人弄混,我还贴心的打印了编号和名字。 然后就是接入风扇的接口 一般建议大家准备一个CR1220 的纽扣电池为BIOS供电,当然,如果你买了IO扩展板套件的话,风扇和纽扣电池都 会在包裹里,非常的nice~ 上面的电池规格CR1220 ,别买错。 擦电~ 开机~ 如果没有IO扩展板,记得去我们驴车社区申购驴车底板哦。 你就说帅不帅吧! 唯一你需要准备的可能就是键盘鼠标,U盘和显示器,HDMI线缆, 如果你有个Xreal ONE Pro的AR眼镜的话,那会更爽。 就拿这个眼镜当显示器哈哈,不要算我打广告啊,我只是真心推荐,有这个眼镜你会发现躺着写代码的乐趣~哈哈 就我这扯犊子的几分钟,系统就烧录好了,我们准备去给MU注入灵魂了~ 将SD卡和USB读卡器一起插入到LP MU上:  接上HDMI线, 然后接个视频采集卡, HDMI转DP的设备 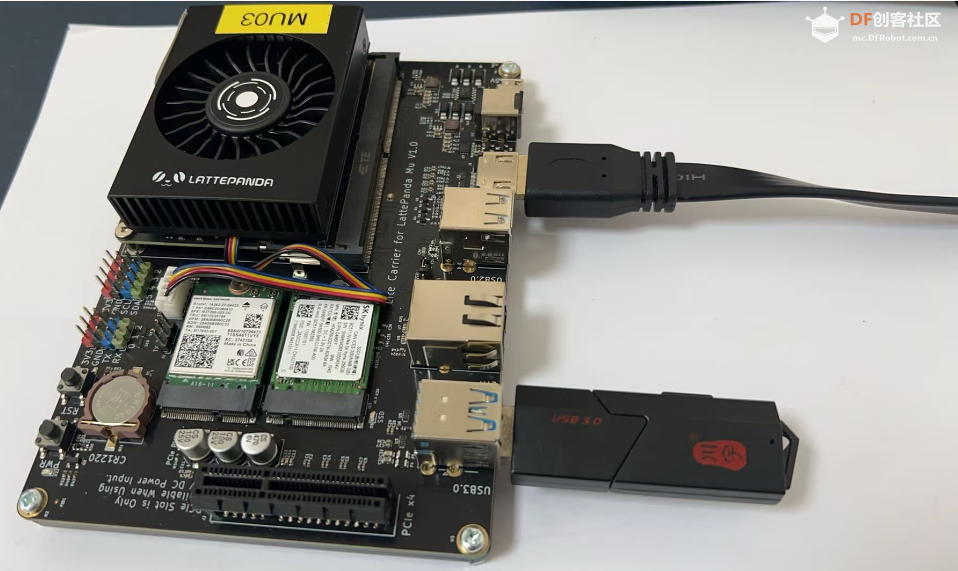   再接上Xreal ONE PRO的眼镜, 对了,鼠标键盘也可以接入。 然后就找个电源,我用了一个的100w的PD电源。 开机后要狂按DEL键,进入bios设置USB盘启动。 当你开机看到这个熊猫头像的时候,快速看del键哦  然后就进入bios了 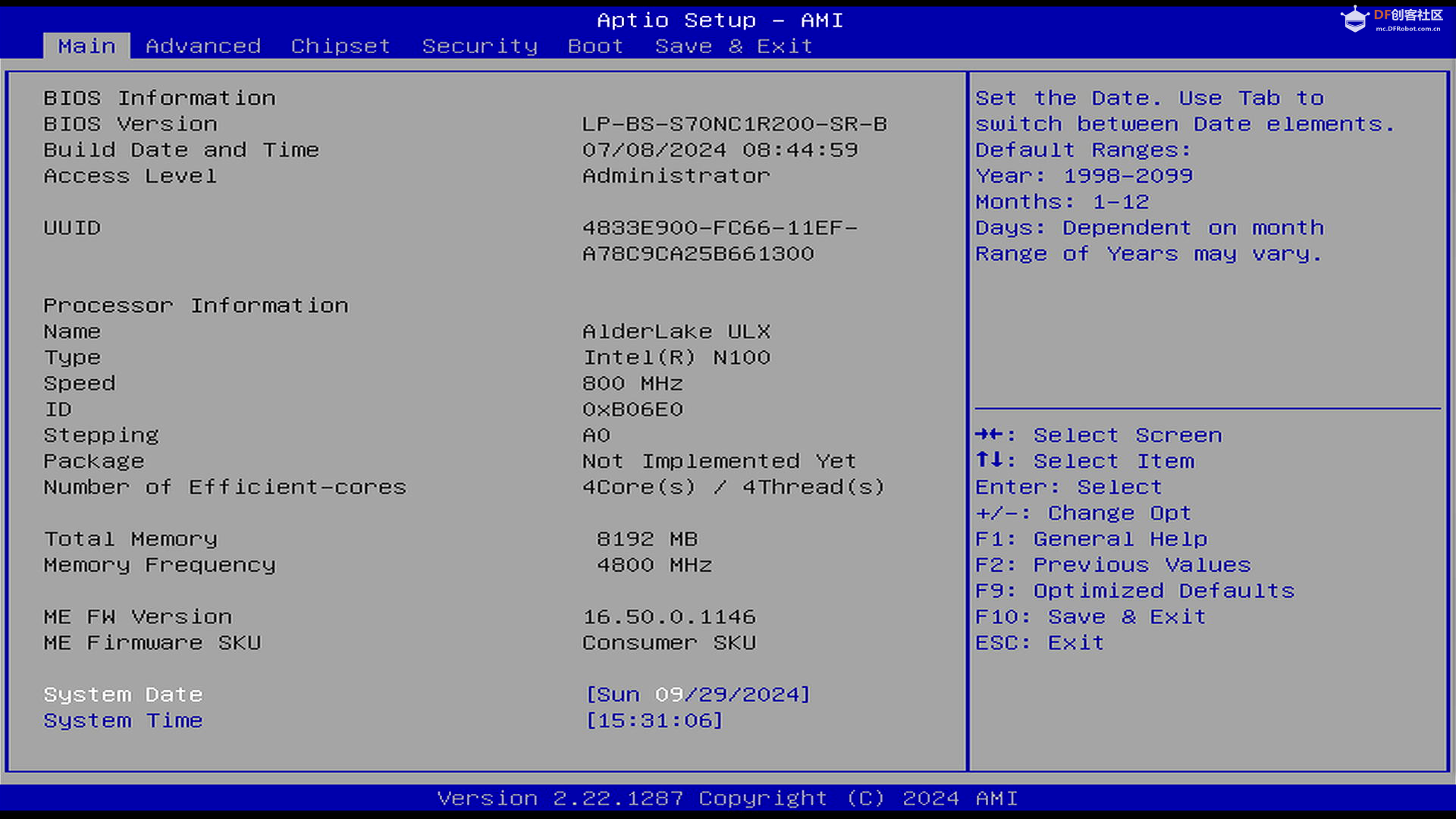 一看系统时间不对,赶紧改掉。 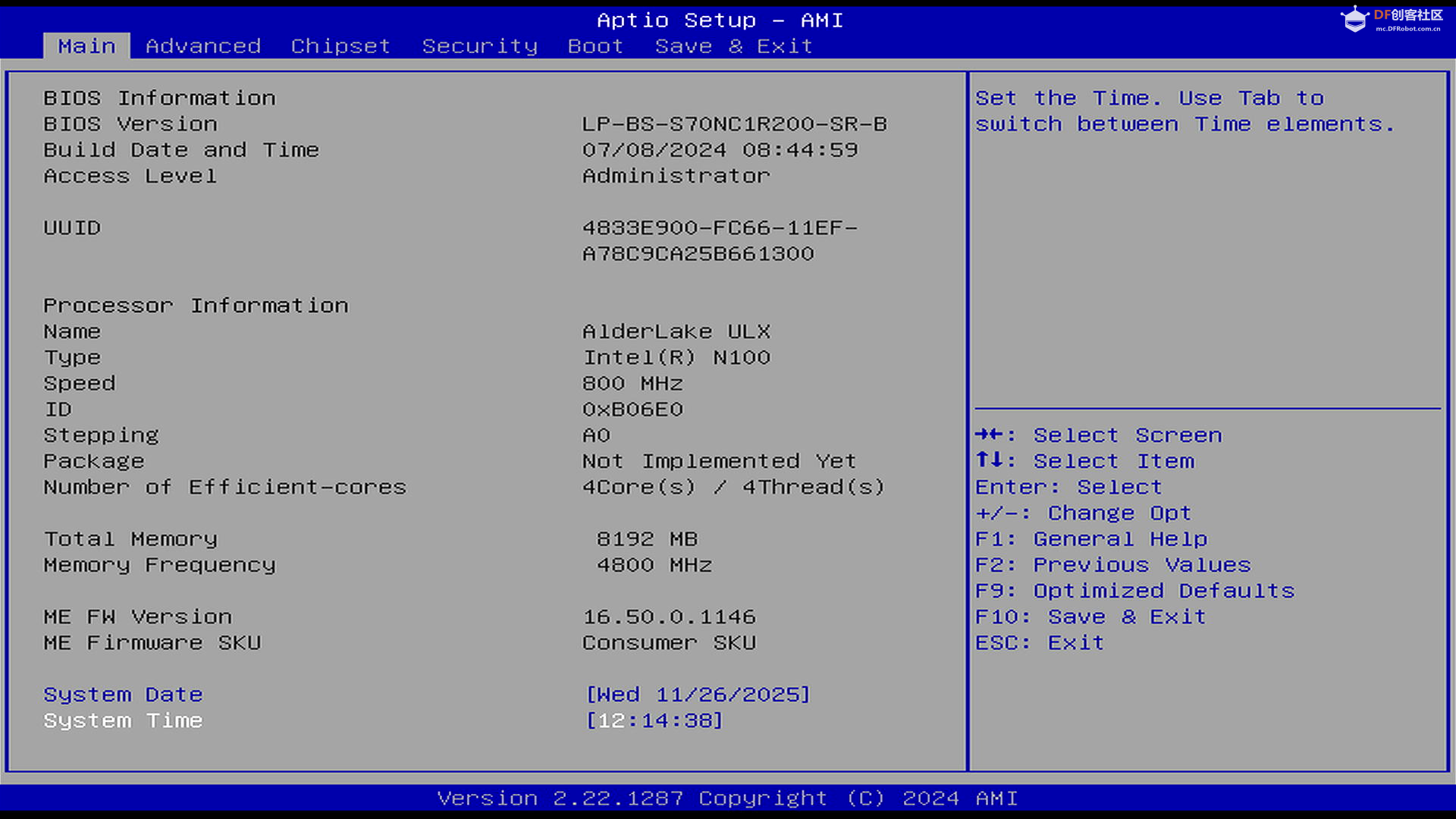 然后看看ssd是否识别。 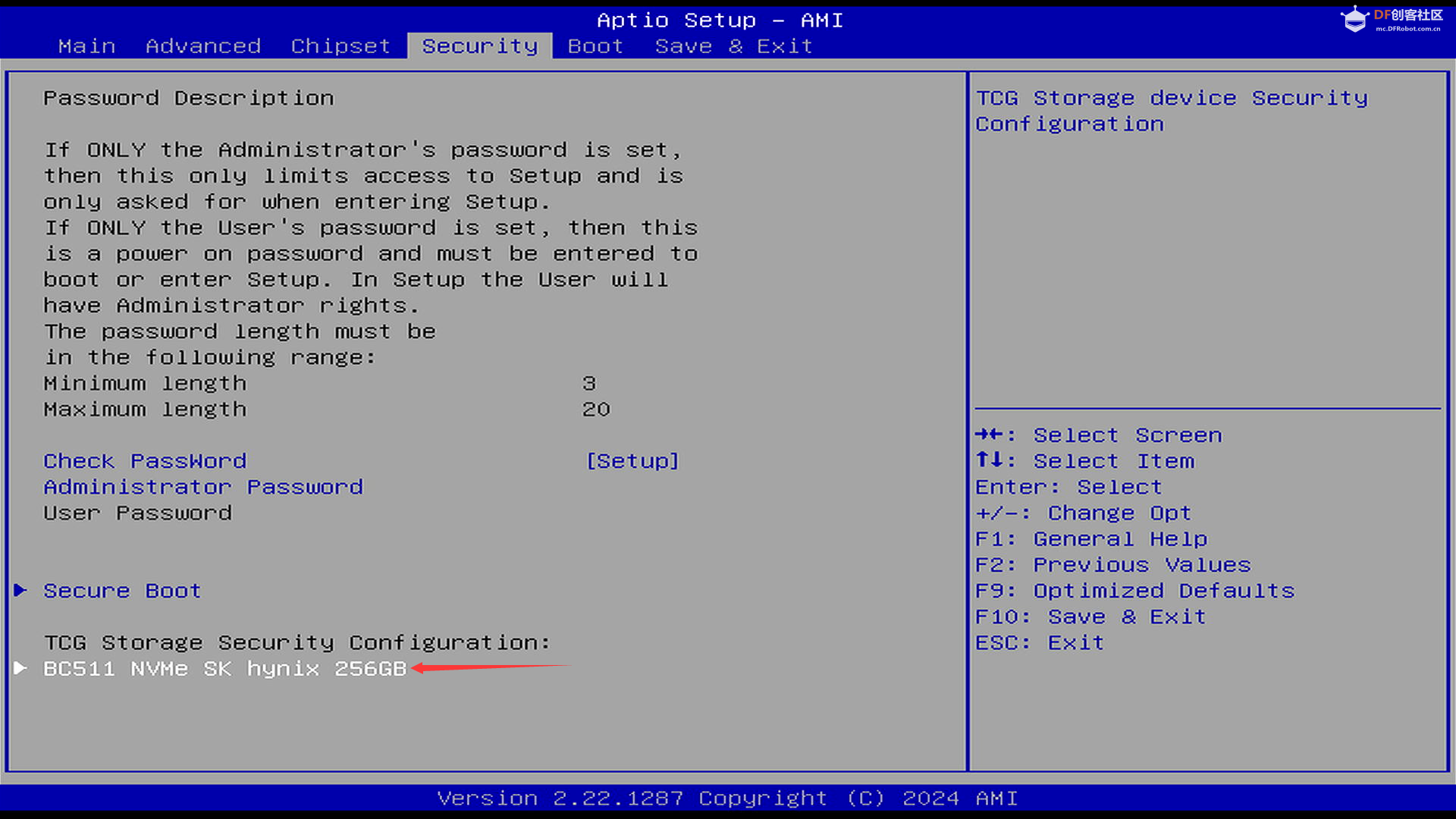 没问题。 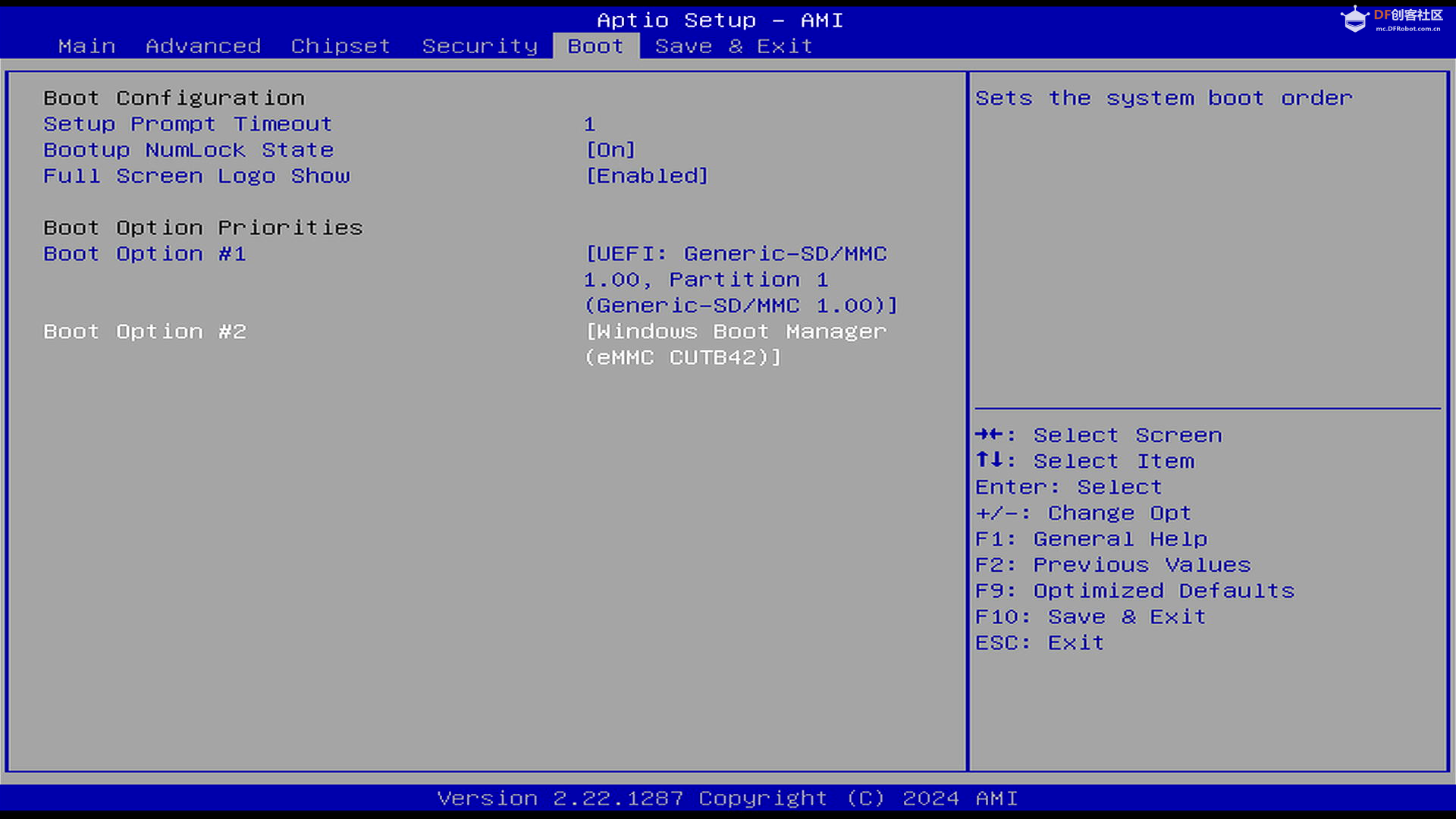 调整一下启动顺序。 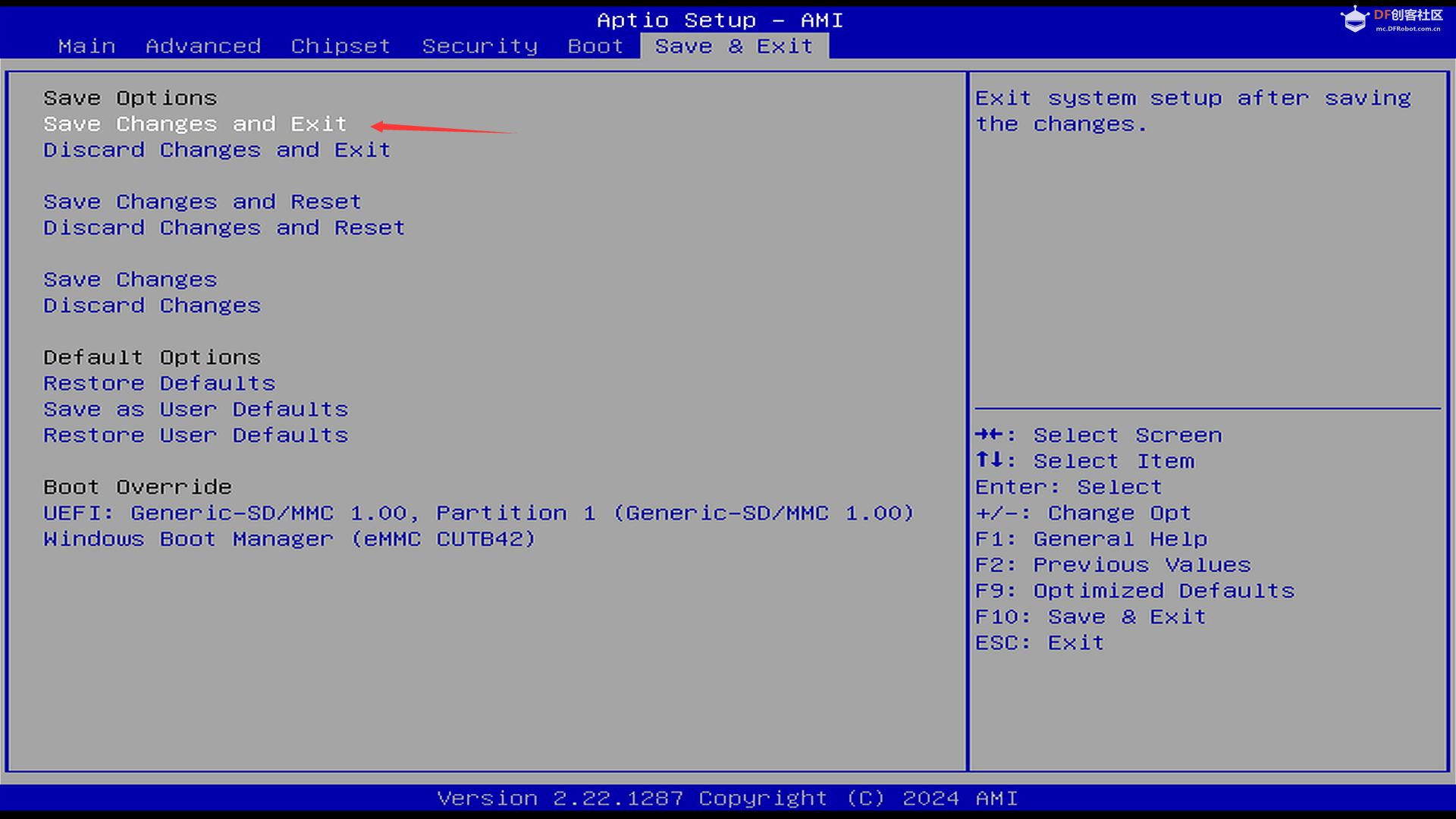 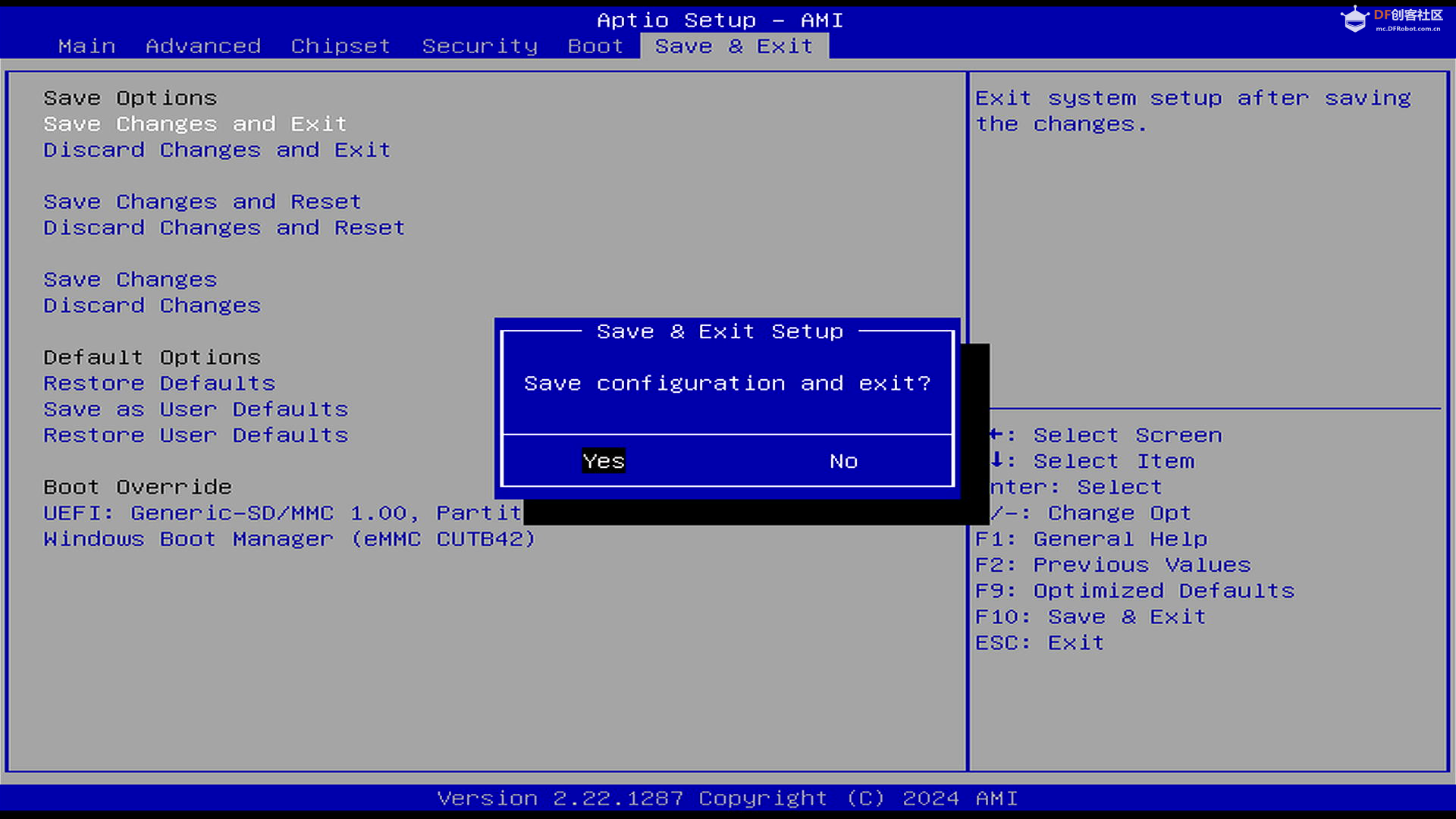 保存配置并从USB接口启动。 默认启动项回车进入USB提供的系统环境。  进入系统了,按照提示一步步配置初始的信息。 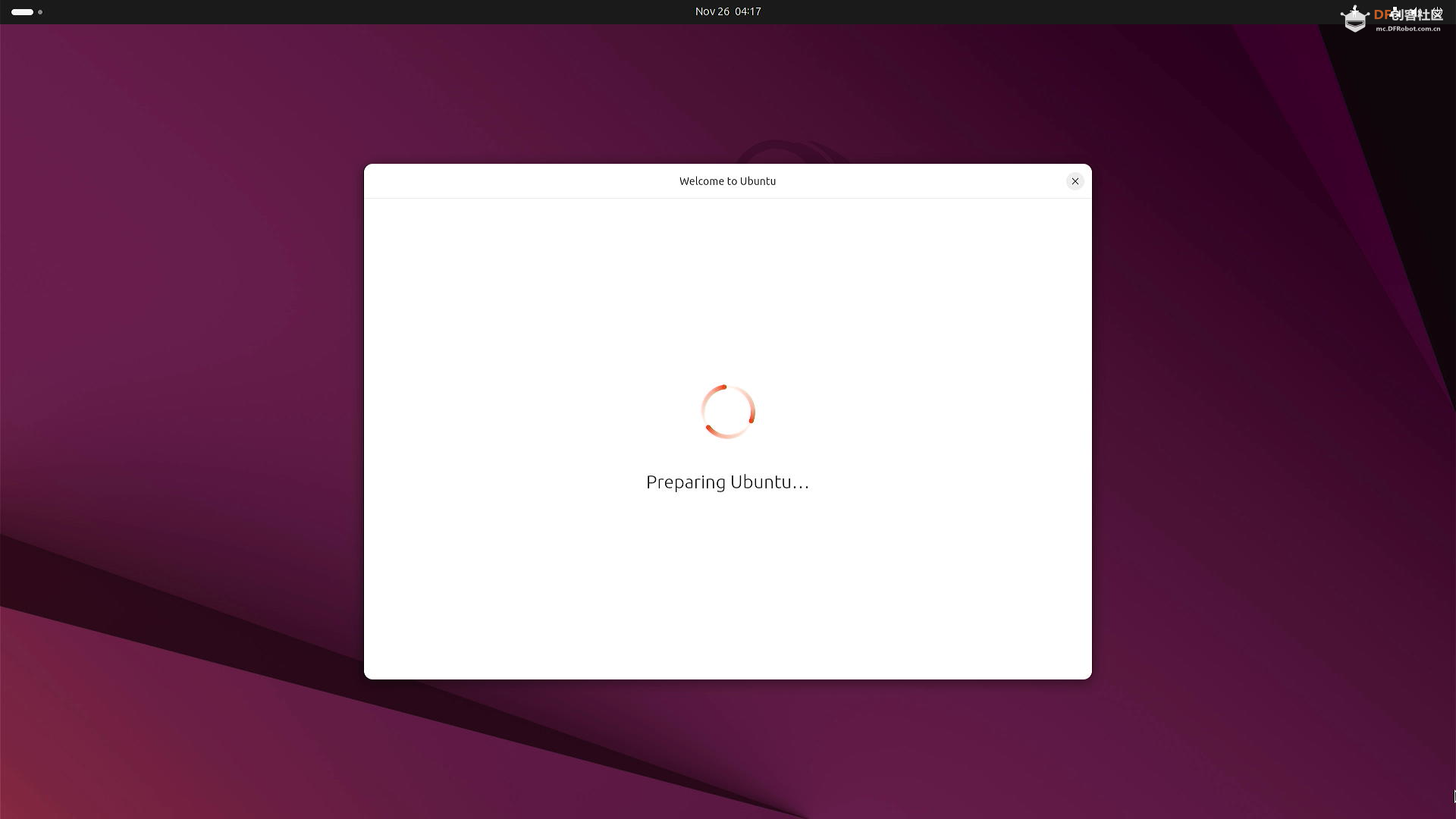 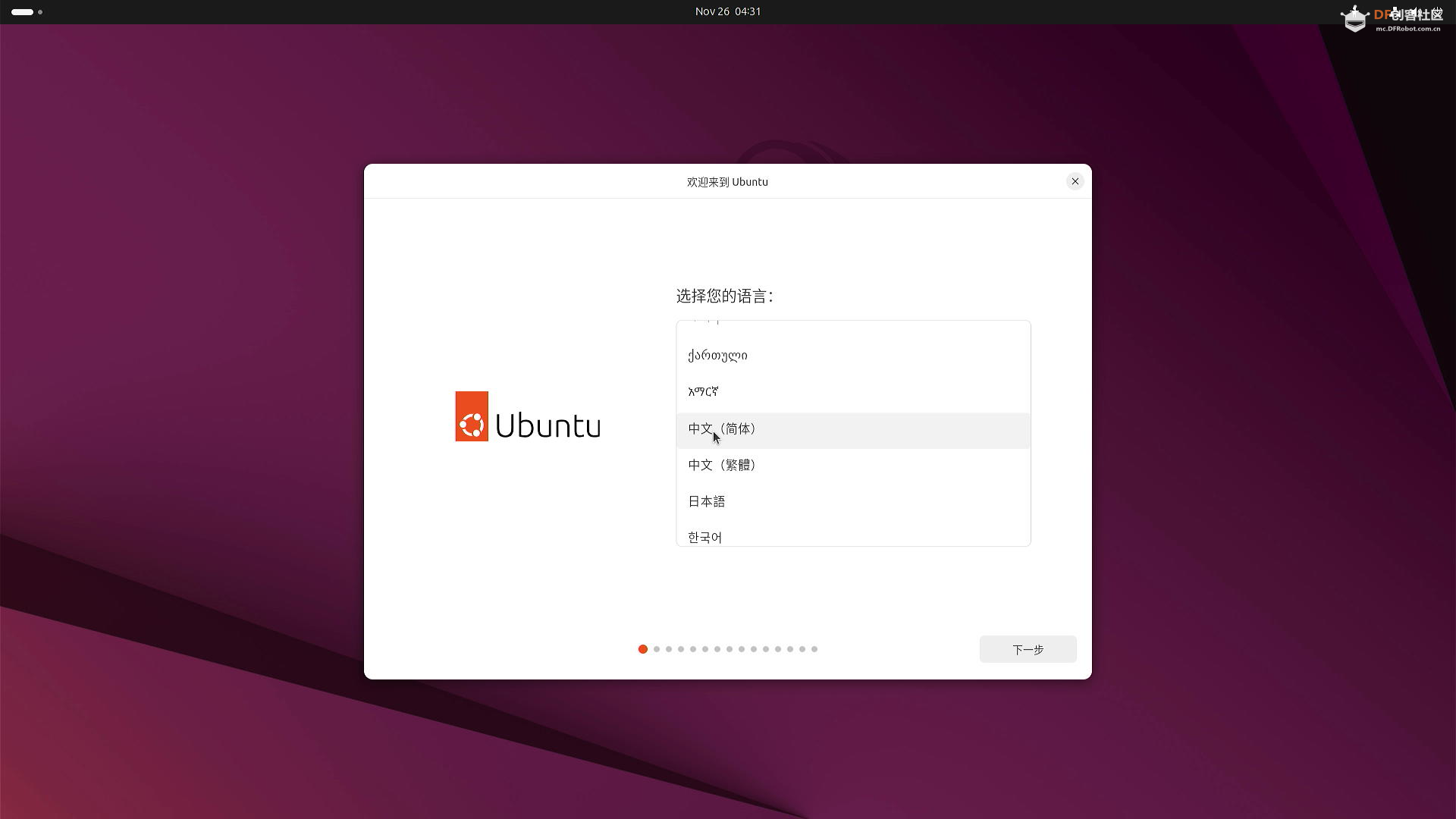 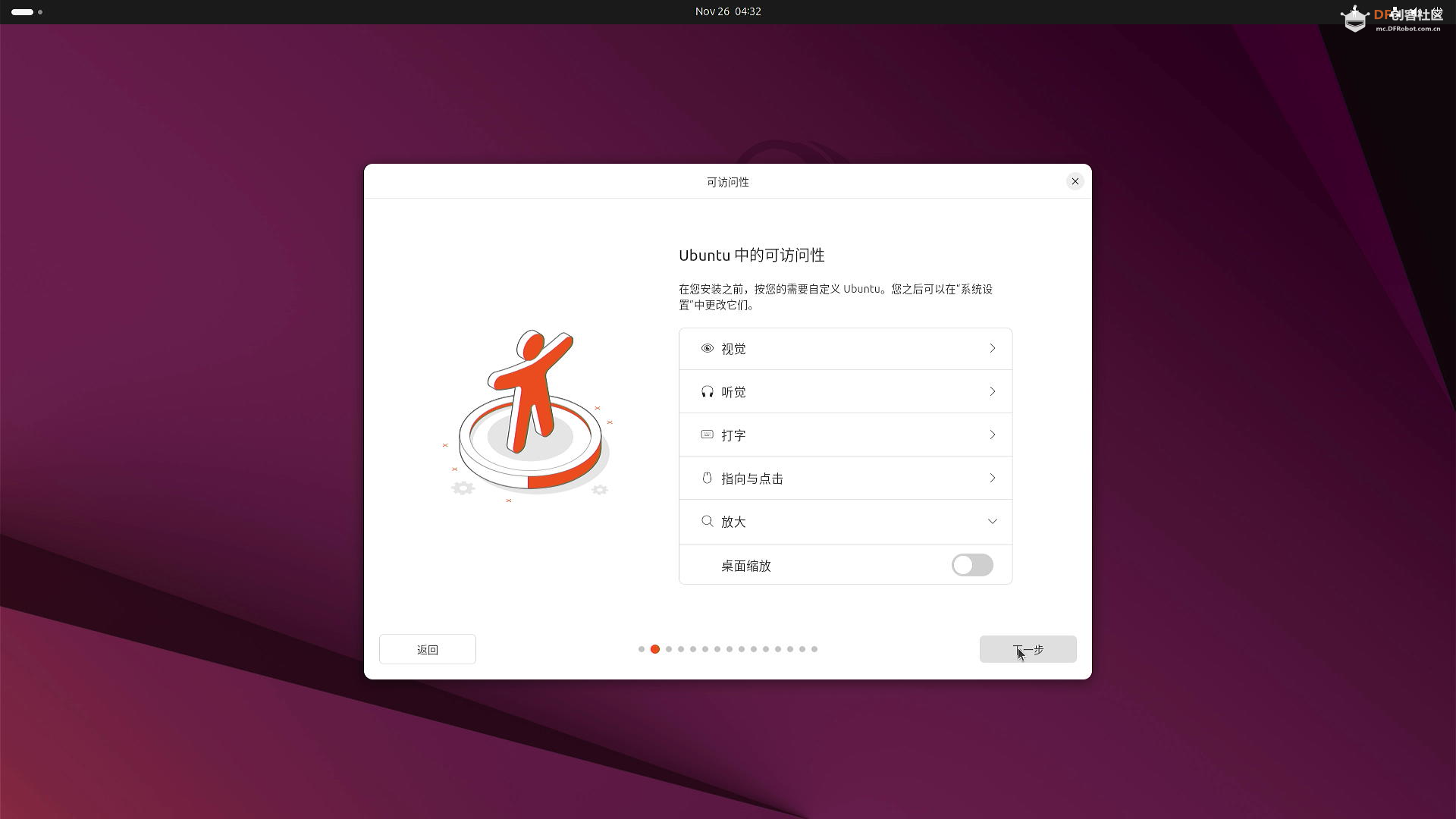 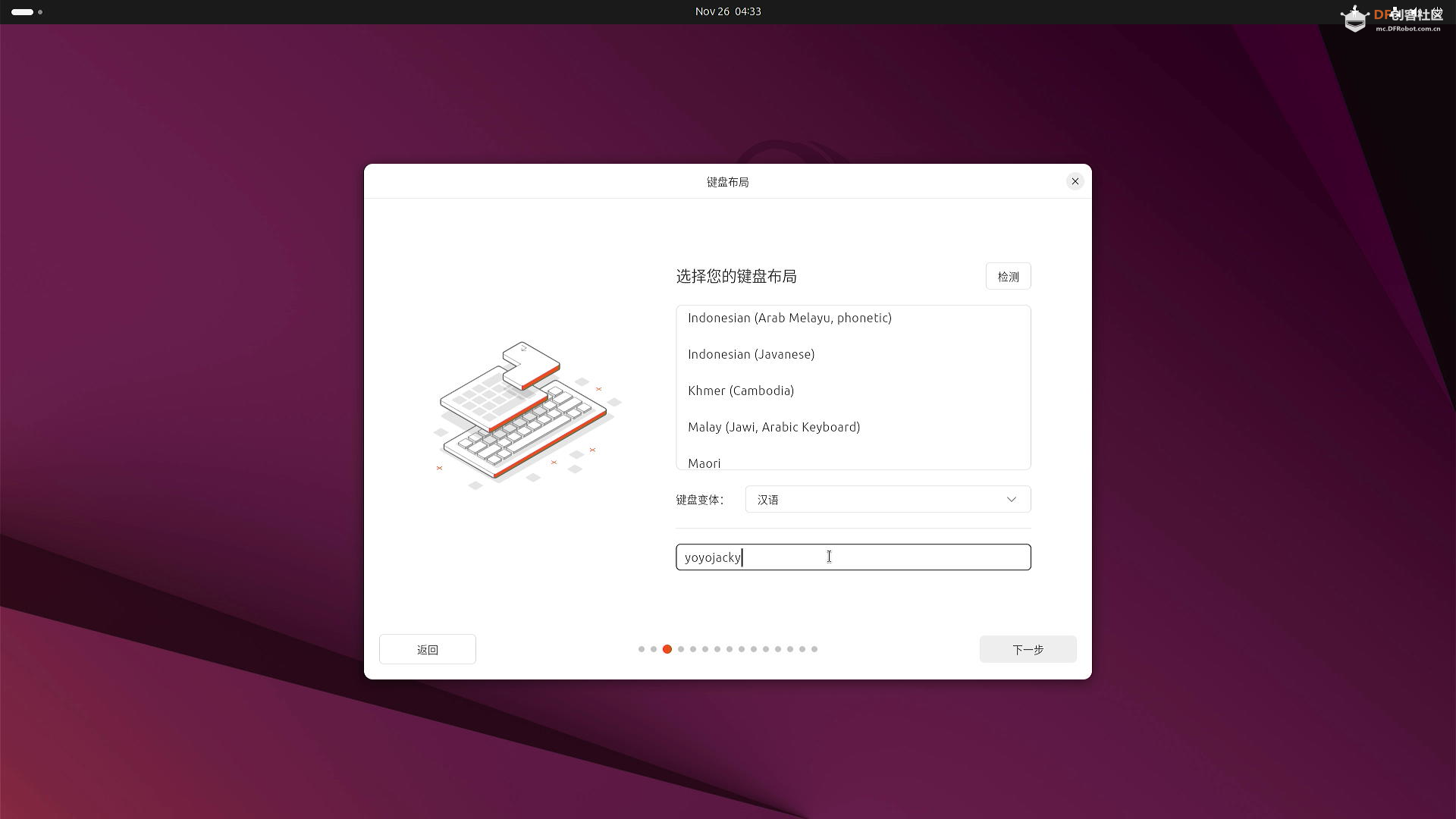 配置网络,我接入了有线网络,你如果有无线网卡也可以选择无线。   然后配置完成就开始安装。  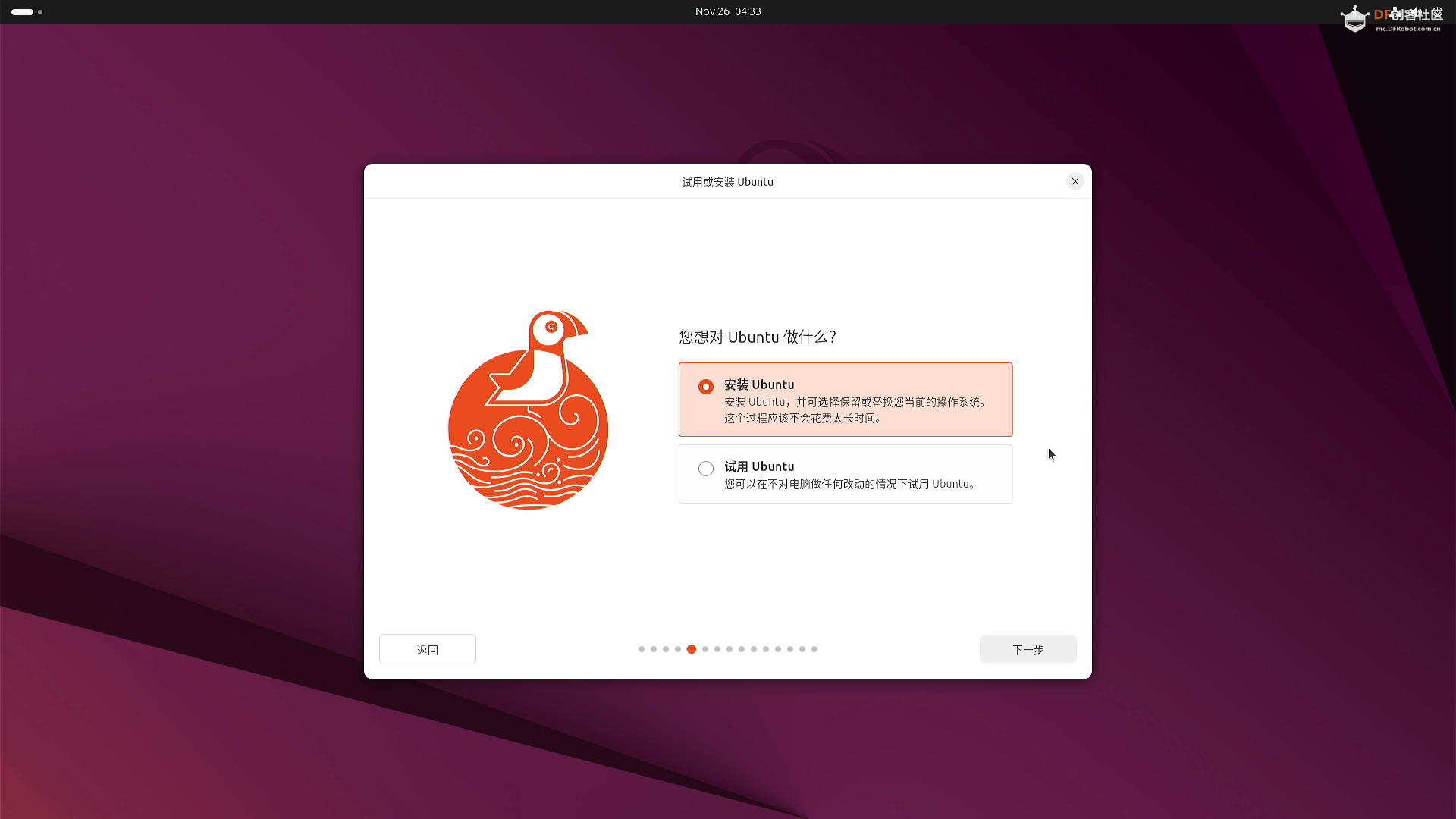    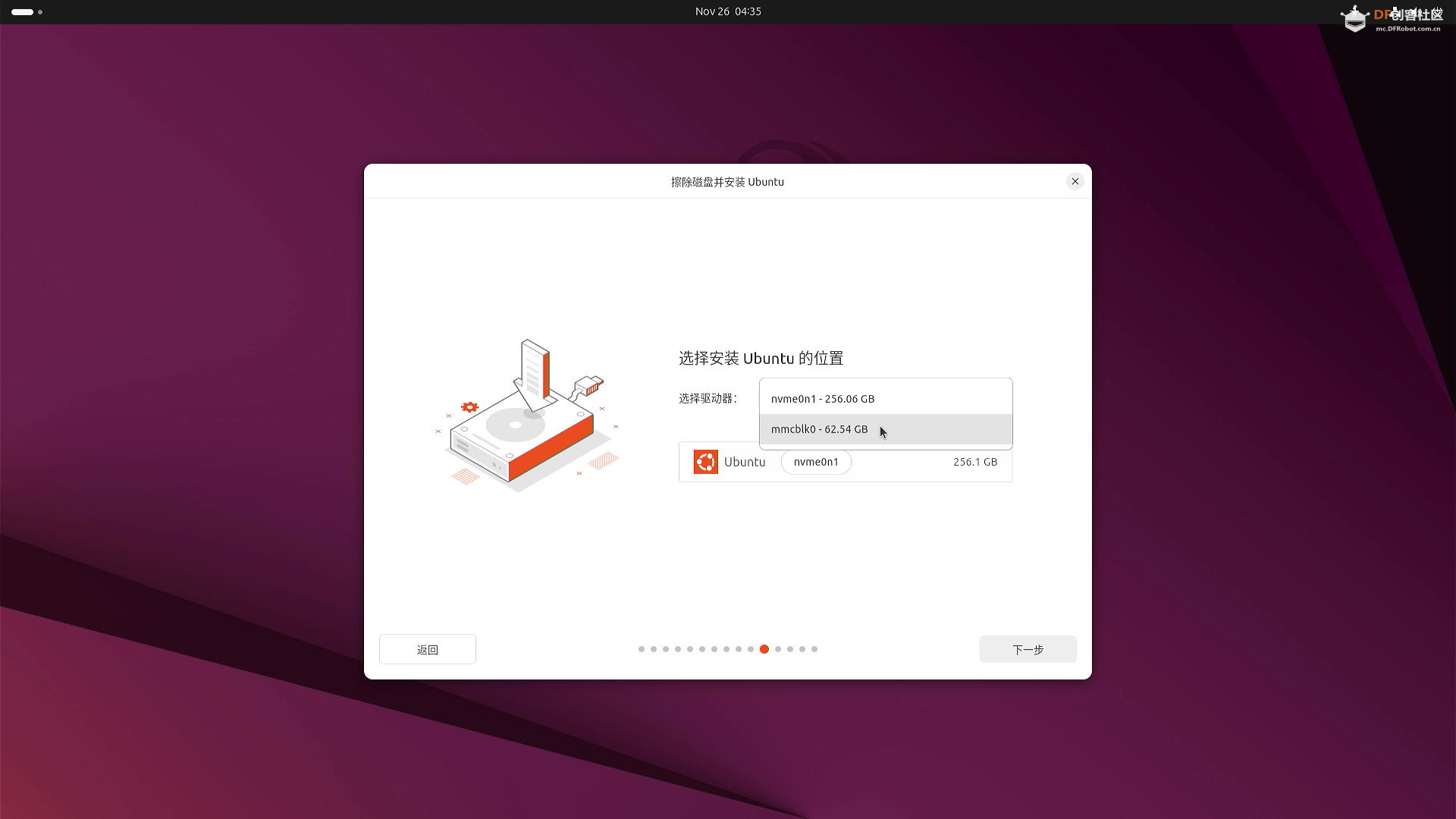  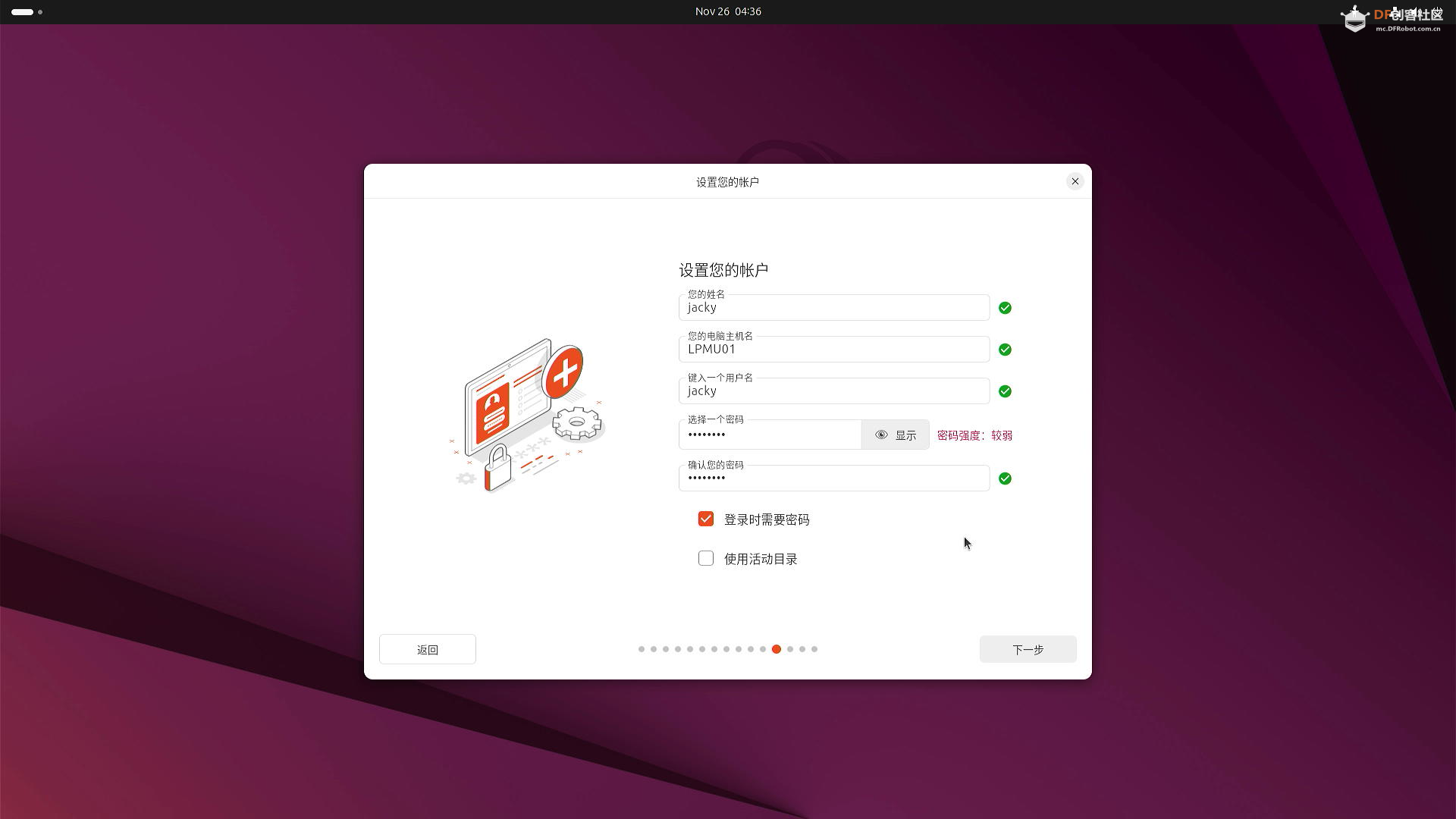 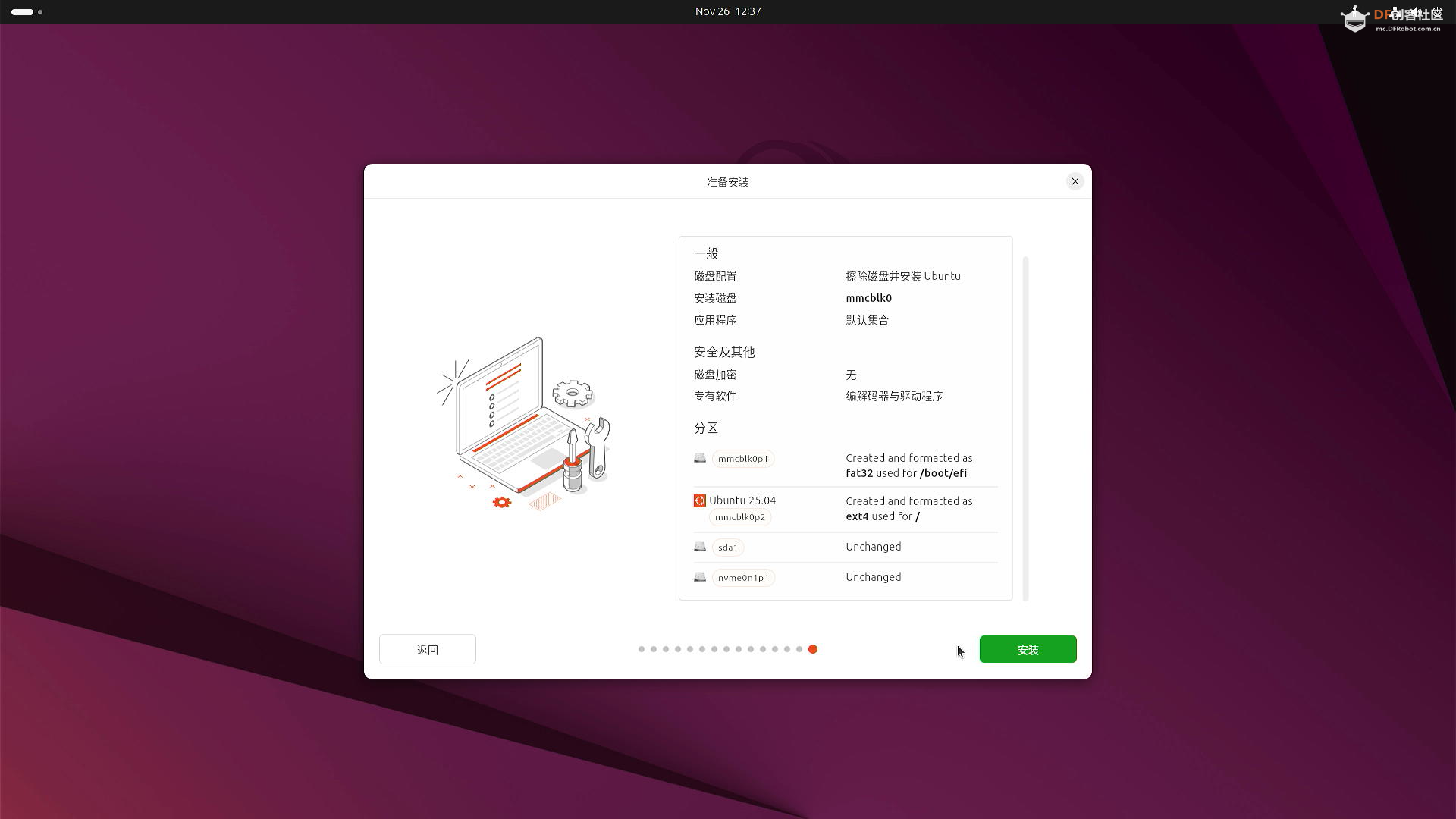 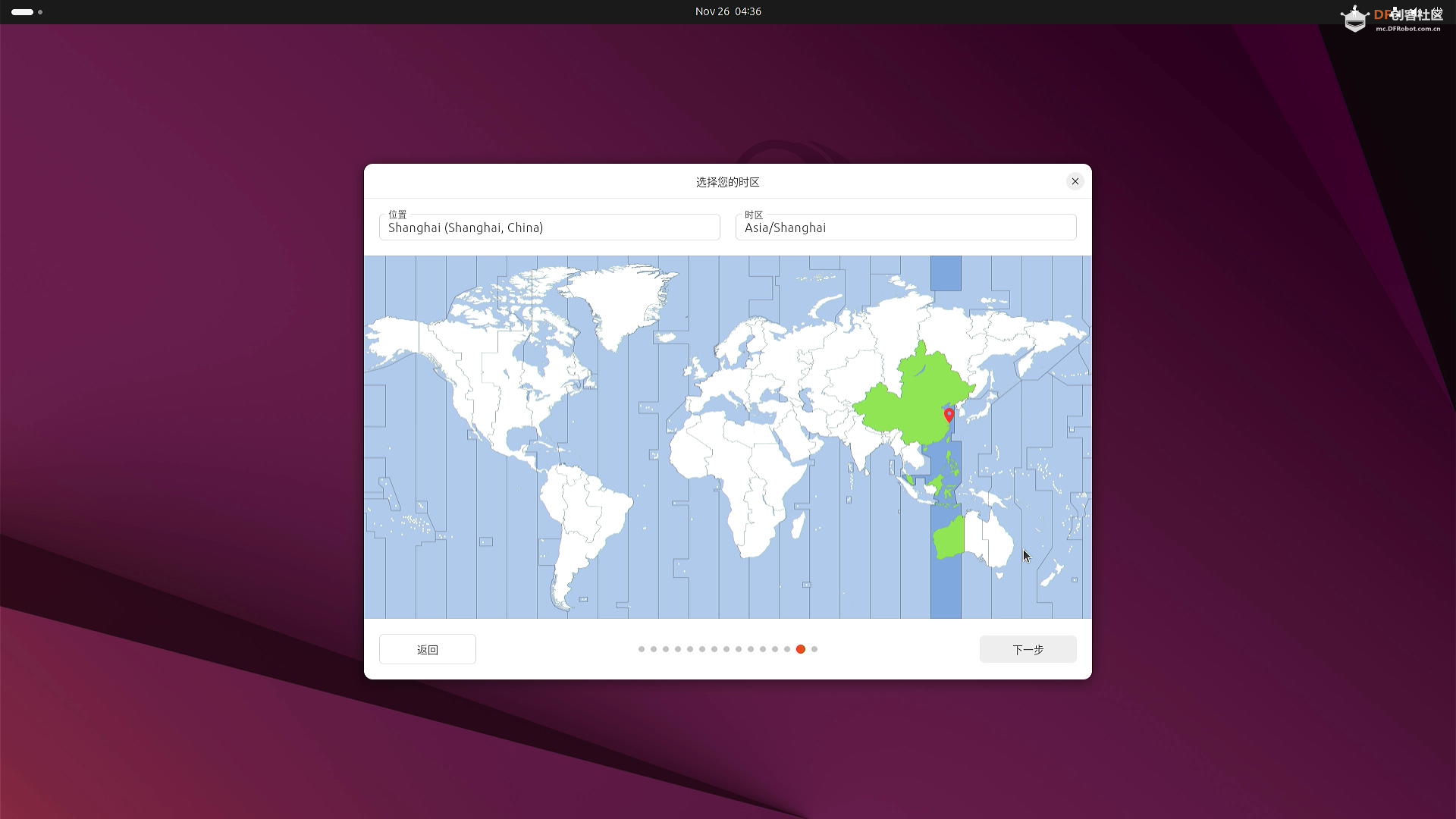   一路就默认都行。速度杠杠滴~ 安装完成后选择一下,是否支持ubuntu发展啥的。默认就行。   然后finish。 就可以打开一个终端进行基本配置了  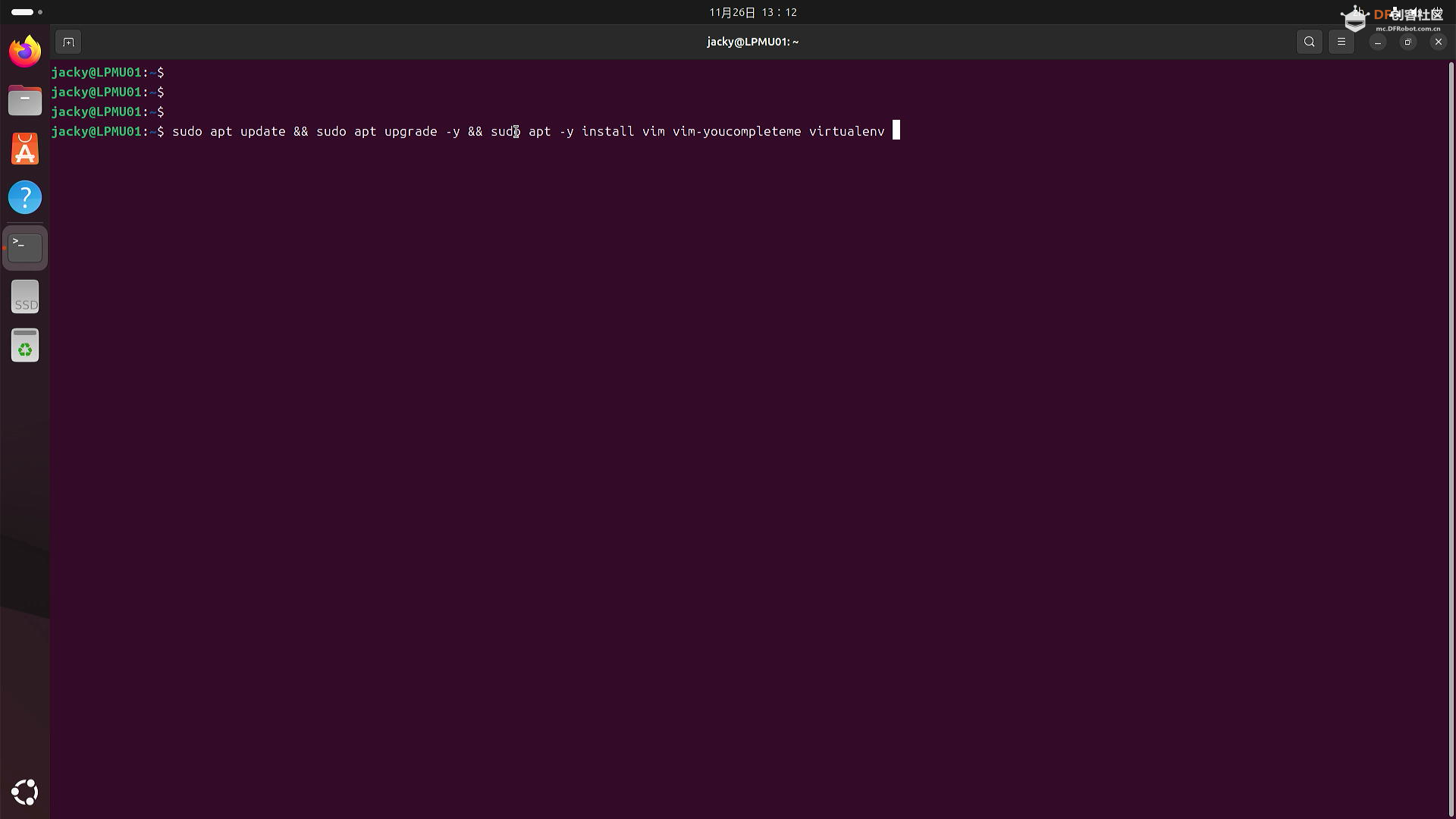 我就简单更新了一下系统的软件仓库,安装了一些我常用的软件包,包含virtualenv的环境,vim软件包相关的,还有openssh-sever 开启了远程ssh的配置,并且安装一些常用的库,例如:opencv-python, opencv-contrib-python, scikit-learn, donkeycar, numpy , mediapie-rpi4 等等。 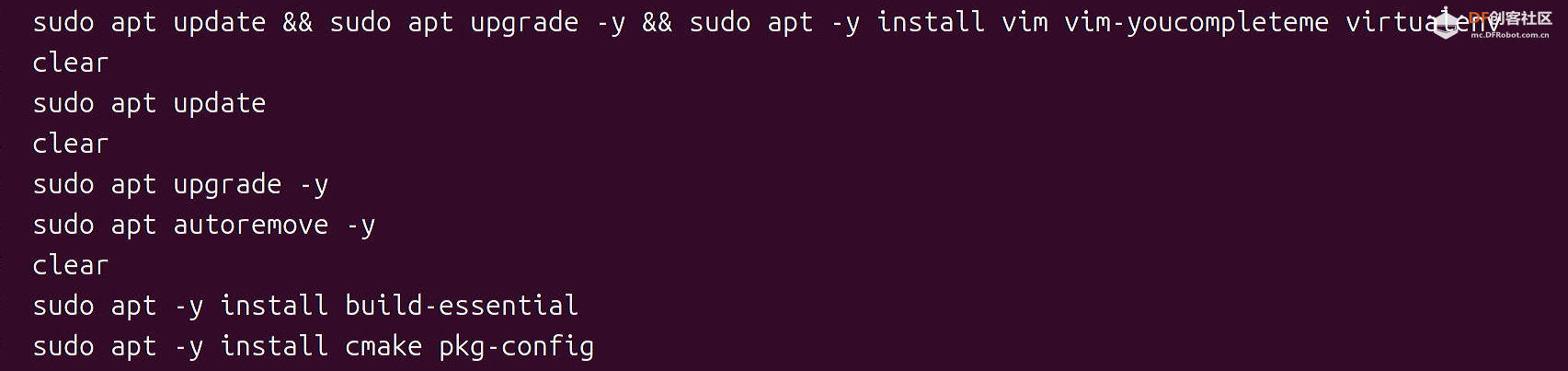 接下来尝试驱动摄像头,看看是否能够正常使用,为驴车的装配做单元测试。 插入USB摄像头,我用的是我从垃圾堆里面翻出来临时用一下的。  看一下设备识别情况:  UVC的摄像头就是容易使用。直接默认就识别出来了。 下面写段代码测试一下摄像头: 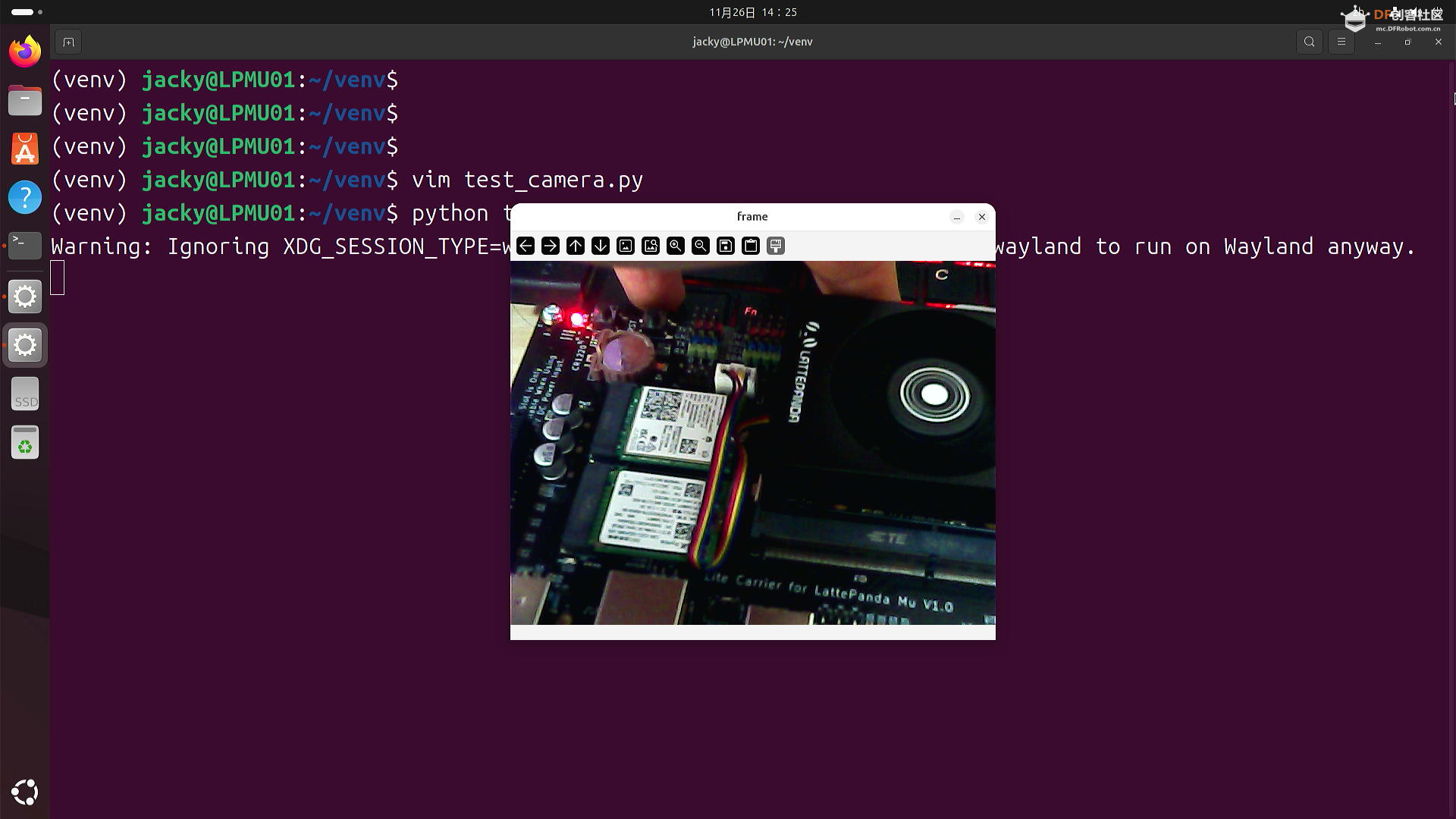 代码如下: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






