|
1611| 11
|
[项目] 【花雕动手做】6.5寸无刷轮毂电机:机器人底盘黄金动力 |

|
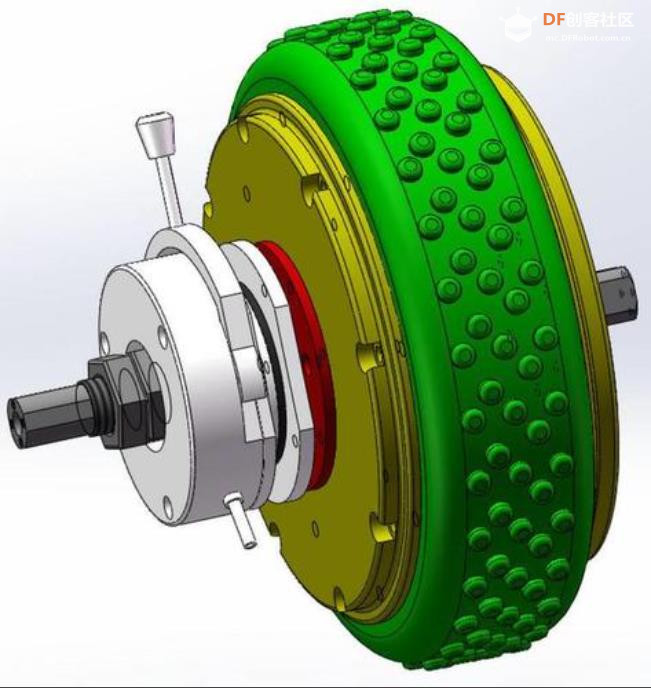
6.5 寸无刷轮毂电机,是把 BLDC 无刷电机 + 减速机构 + 轮毂 + 轴承 全部集成在轮子内部的一体化驱动单元,直径约 6.5 英寸(≈165mm),是目前小型移动机器人、平衡车、AGV、服务机器人最常用的动力轮之一。 它的核心特点:
  |
|
6.5 寸轮毂电机的核心参数 1、尺寸 直径:约 165mm 宽度:约 45~60mm 轴径:16mm 2、电气参数 额定电压:24V / 36V(机器人常用) 额定功率:100W~350W 额定电流:3A~10A 空载转速:约 80~150 RPM 最大扭矩:8~25 N・m(非常适合机器人) 3、机械特性 减速比:1:15 / 1:20 / 1:25(常见) 轮毂材质:铝合金 / 塑料 轮胎:橡胶充气胎 / PU 实心胎 防水等级:IP54(多数) 4、控制方式 三相 BLDC,需配 无刷电机驱动器(FOC 或方波) 支持 PWM 调速、正反转、刹车 支持霍尔测速,可做闭环速度控制 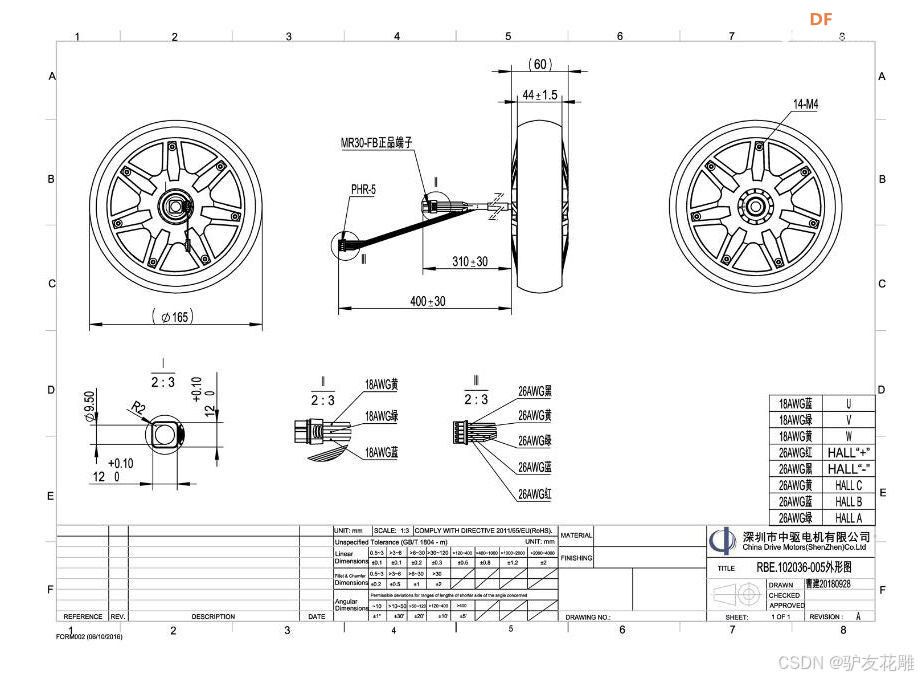  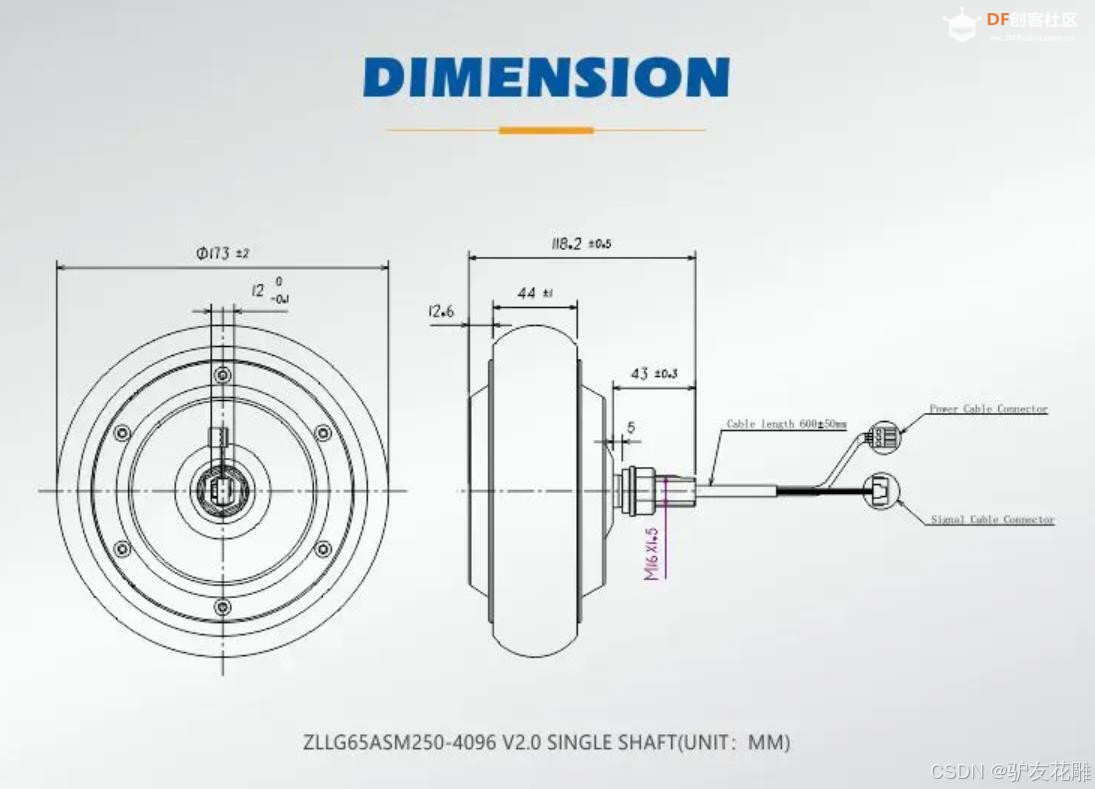 |
|
6.5 寸轮毂电机的核心优势(为什么机器人爱用?) 1. 一体化结构,安装极其简单 电机、减速、轮子、轴承全部集成 机器人底盘只需要固定 “轴” 或 “法兰” 布线少、结构干净、空间利用率高 2. 传动效率高,无额外损耗 无皮带、无链条、无齿轮箱外露 动力直接输出到轮胎,效率比外置电机高 15%~30% 3. 扭矩大,适合机器人低速大负载 内置减速,扭矩轻松达到 10 N・m 以上 能轻松推动 30~80kg 的机器人底盘 启动平稳、不易堵转 4. 无刷结构,寿命长、噪音低 无电刷磨损,寿命可达 2000~5000 小时 噪音比有刷电机低很多,适合服务机器人 5. 防水防尘,适合室外 / 半室外机器人 IP54 级别,可在地面有水、灰尘环境使用 比普通直流减速电机更耐用 6. 自带霍尔,可做闭环速度 / 里程控制 内置 3 个霍尔传感器 可测速、测转向、做里程计(Odometry) 适合导航、避障、路径规划机器人  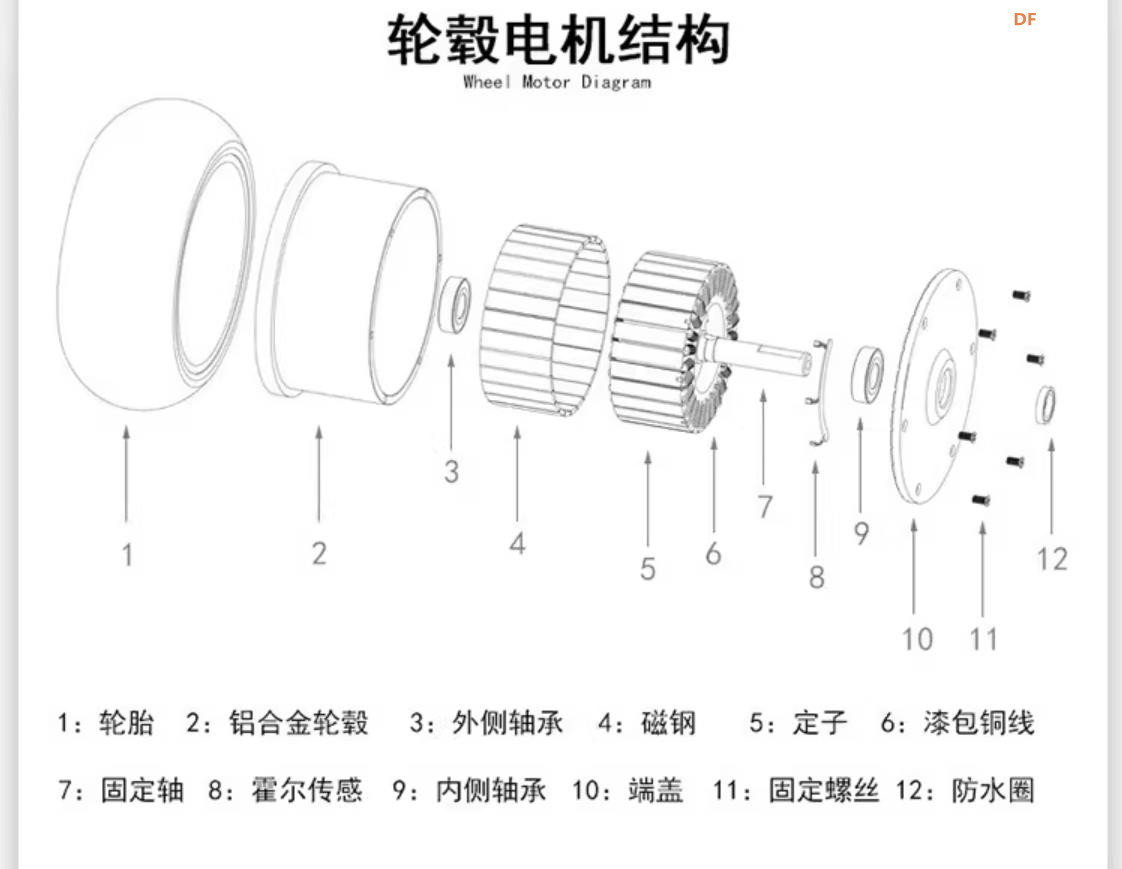 |
|
6.5 寸轮毂电机在机器人底座上的典型应用 下面是最常见、最成熟的机器人应用场景: 1. 两轮自平衡机器人(最经典) 两轮 + 6.5 寸轮毂电机 结构简单、重心低、稳定性好 用于:教学平衡车、巡检机器人、服务机器人底盘 2. 差速驱动机器人(最通用) 左右各一个 6.5 寸轮毂电机 + 1~2 个从动轮 控制简单、原地转向、运动灵活 用于:AGV、仓储机器人、自动巡检机器人、教学机器人 3. 四轮全驱机器人(高精度平台) 4 个 6.5 寸轮毂电机独立驱动 可做差速、斜行、原地旋转 用于:服务机器人、医疗机器人、高精度移动平台 4. 麦克纳姆轮全向机器人(高端) 4 个 6.5 寸轮毂电机 + 麦克纳姆轮 可前后、左右、斜向、自旋全向移动 用于:工厂 AGV、实验室机器人、竞赛机器人 5. 室外巡检 / 安防机器人 6.5 寸充气胎 + 轮毂电机 越障能力强、适应不平地面 用于:园区巡检、安防巡逻、工地监测机器人 6. 服务机器人 / 送餐机器人 静音、平稳、外观整洁 适合商场、酒店、医院环境 轮毂电机一体化结构让底盘更薄、更美观  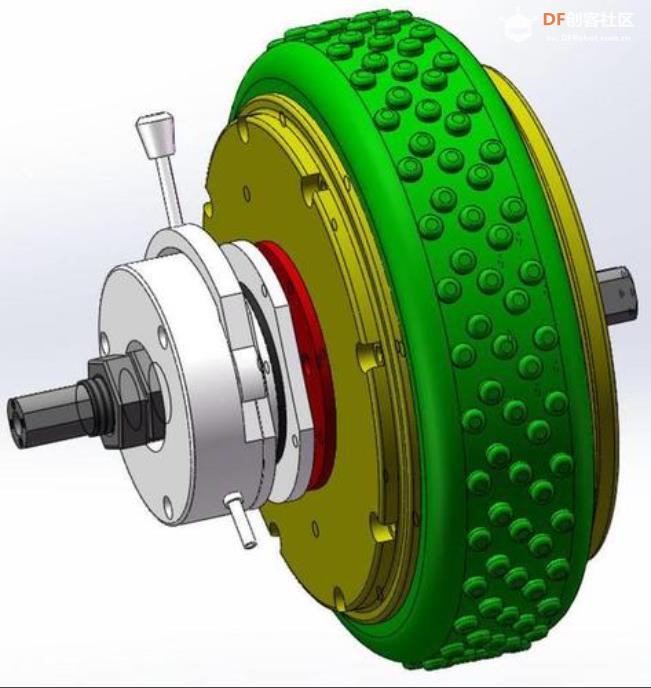  |
|
6.5 寸轮毂电机 + 机器人底座的典型结构方案 方案 A:两轮自平衡底盘(最常用) 2 × 6.5 寸轮毂电机 24V/36V 锂电池 无刷驱动器 × 2 Arduino / ESP32 / 树莓派主控 MPU6050 姿态传感器 应用:教学、科研、平衡车机器人 方案 B:差速驱动底盘(通用型) 2 × 6.5 寸轮毂电机(驱动) 1~2 个万向轮(支撑) 无刷驱动器 × 2 超声波 / 红外避障 应用:自动导航、巡检、AGV 方案 C:四轮全向底盘(高端) 4 × 6.5 寸轮毂电机 4 路无刷驱动 支持全向移动 应用:高精度机器人、竞赛机器人、服务机器人   |
|
使用 6.5 寸轮毂电机必须注意的事项(工程避坑) 1. 必须配无刷驱动器(不能直接接 Arduino) 轮毂电机是三相 BLDC,需要专用驱动器 常见: 方波驱动(便宜) FOC 驱动(平稳、静音、高精度) 电流必须 ≥ 电机额定电流的 1.5~2 倍 2. 供电必须足够(24V 主流) 6.5 寸轮毂电机大多是 24V 电池建议:24V 10Ah~20Ah 锂电池 电流不足会导致:动力弱、启动抖、保护停机 3. 霍尔线必须正确接(不然电机不转 / 抖动) 霍尔线顺序:A、B、C 不能接错 接错会导致:电机抖动、不转、发热 调试时先单独测试电机转向 4. 轮胎选择影响机器人性能 充气胎:减震好、越障强,适合室外 PU 实心胎:不爆胎、稳定,适合室内平坦地面 机器人底盘尽量选 PU 胎,更稳定、更易控制 5. 轴固定方式很关键 6.5 寸轮毂电机常见两种固定: 轴固定(两边夹紧) 法兰固定(侧面螺丝) 必须保证刚性,否则会出现:抖动、跑偏、噪音 6. 防水要注意(虽然 IP54,但不能泡水) 适合地面有水、潮湿环境 不能浸泡、不能高压水枪冲 7. 闭环控制才能做导航机器人 必须利用霍尔传感器做速度闭环 否则机器人会:跑偏、速度不稳、里程不准 6.5 寸无刷轮毂电机是小型机器人底盘的 “黄金动力”:一体化结构、大扭矩、高效率、长寿命、易安装,完美适配两轮平衡、差速 AGV、全向移动、服务机器人、室外巡检等几乎所有中小型移动机器人,是目前创客、教学、工程应用中最主流的驱动方案之一。    |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 我也是刚开始学习,准备先找驱动器,让它先转动起来再说......
我也是刚开始学习,准备先找驱动器,让它先转动起来再说......

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






