|
829| 6
|
[项目] 【花雕】ESP32 + 大功率双向 ESC|机器人底盘动力控制方案 |
|
1、ESP32 + 标准双向ESC的CAN总线控制 场景:中型机器人底盘,需要高功率和精确速度控制。 核心逻辑:ESP32通过CAN总线发送DShot协议指令,控制多个ESC同步。 |
|
2、ESP32 + VESC 6.0 高性能FOC控制 场景:大功率机器人底盘,需要最高性能的FOC控制与能量回馈。 核心逻辑:ESP32通过UART与VESC通信,使用VESC Tool协议。 |
|
3、ESP32 + 多ESC同步的SWD调试与OTA升级 场景:四轮全向移动机器人,需要精确同步和远程维护。 核心逻辑:ESP32通过SPI控制多个ESC,集成SWD调试和OTA功能。 要点解读 通信协议的选择决定系统性能上限 CAN总线(案例一):工业级可靠性,支持多节点(ESC)同步,1Mbps速率满足实时控制。DShot over CAN是高端ESC的常见配置,支持双向遥测。 UART(案例二):VESC标准协议,带宽足够,但线缆复杂。VESC Tool协议提供丰富的遥测和配置参数。 SPI(案例三):最高速率(可达10Mbps),可实现微秒级同步,适合多ESC精确协同,但布线要求高,抗干扰能力弱于CAN。 ESC的配置模式与控制策略 DShot数字协议:替代传统PWM,抗干扰强,分辨率高(11位),支持遥测请求。案例一的powerToDshot()函数实现功率到DShot值的映射。 VESC的电流控制模式:最精确的扭矩控制,直接控制相电流。案例二中setCurrent()是VESC的高级API,需要精确的电机参数配置。 同步控制必要性:多ESC的毫秒级不同步会导致底盘“扭动”。案例三的synchronizeESCs()通过交叉耦合补偿算法,让4个ESC的速度误差相互补偿,实现真正的同步。 大功率系统的安全与保护 电流限制:必须硬件(保险丝、断路器)和软件双重保护。案例二的setVescMode(VESC_MODE_CURRENT, 30.0)设置软件限流。 能量回馈处理:双向ESC在减速时会将动能转化为电能回充电池。案例二的handleRegenerativeBraking()必须限制回馈电流,防止电池过充。 温度监控:大功率ESC的MOSFET温度需实时监控,通常通过ESC遥测获取,超过85°C应降额运行。 ESP32的双核优势利用 Core 0:运行控制循环(FOC算法、运动学计算),必须保证实时性。可使用FreeRTOS任务绑定到核心0。 Core 1:处理WiFi、OTA、HTTP服务器等非实时任务。案例三的Web服务器运行在Core 1,避免干扰控制任务。 定时器中断:案例一的dshotISR()在定时器中断中生成精确的DShot时序,不依赖主循环,保证了时序精度。 系统集成与远程维护 OTA升级:案例三的handleUpdate()实现完整的Web端固件更新,这对于现场部署的机器人至关重要。 SWD调试接口:通过ESP32的JTAG引脚可连接外部调试器,实现实时变量查看、断点调试。需在代码中保留调试符号。 配置持久化:ESC参数(PID、电流限制、电机极对数)应存储于ESP32的NVS或外部EEPROM,支持断电保存和远程配置。 |
|
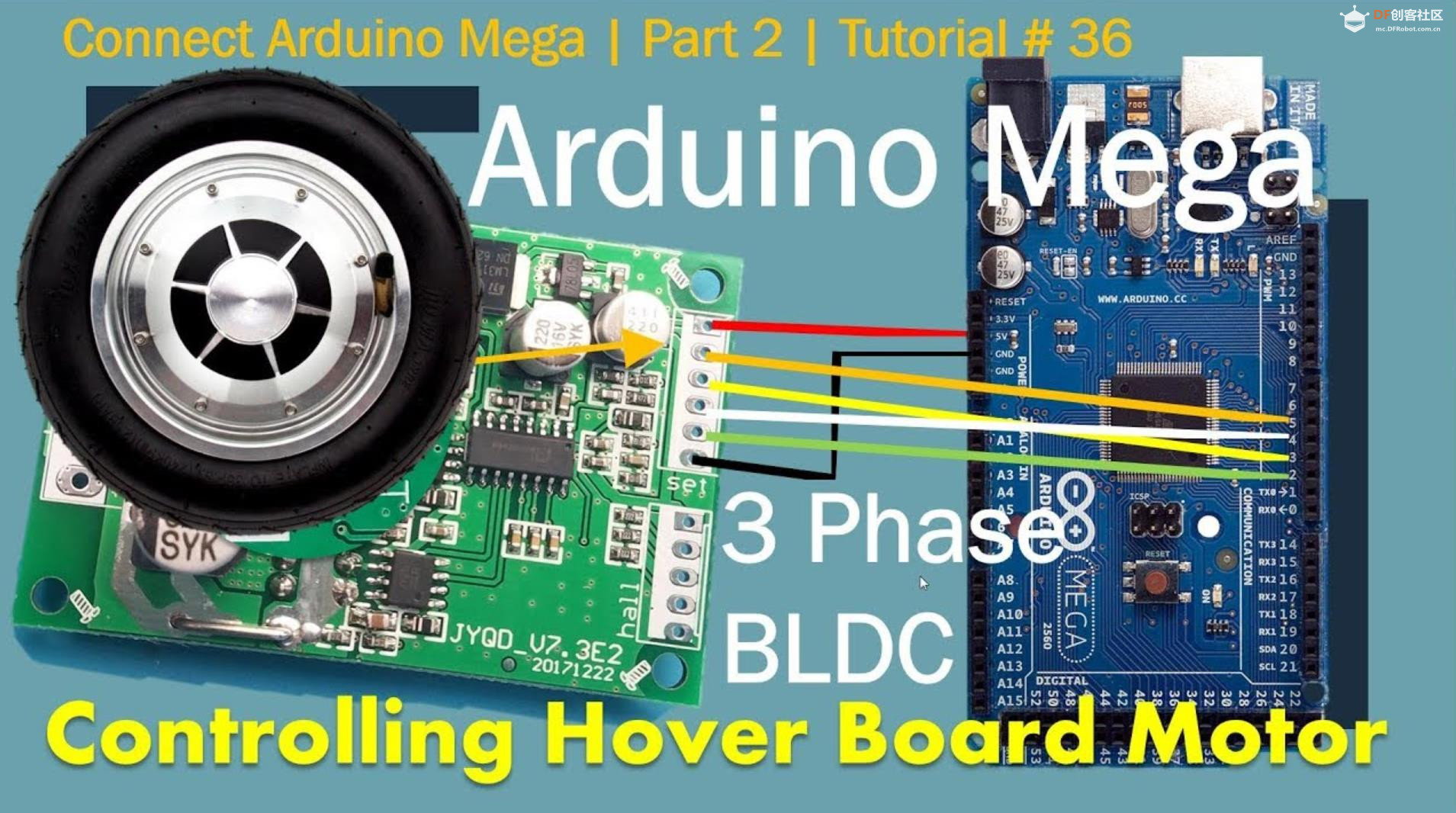
4、基础双向ESC控制(PWM信号) 功能:通过ESP32的PWM控制大功率双向ESC,实现机器人底盘的正反转、加速/减速及停止。 硬件连接: ESP32 GPIO23 → ESC PWM信号线(白色/橙色) ESC电源线 → 独立锂电池(24V/36V) 电机 → 6.5寸无刷轮毂电机(带编码器) |
|
5、基于编码器的闭环速度控制(PID) 功能:通过编码器反馈实现电机速度闭环控制,解决大功率电机启动冲击问题。 硬件扩展: 电机编码器 → ESP32 GPIO16(CLK)、GPIO17(DATA) 使用Encoder库读取脉冲数 |
|
6、多电机差速转向控制(机器人底盘运动) 功能:通过双电机差速实现机器人底盘的前进、后退、转向及原地旋转。 硬件扩展: 电机1 → ESC1(GPIO23) 电机2 → ESC2(GPIO22) 编码器1 → GPIO16/17 编码器2 → GPIO4/5 要点解读 1、电源隔离与保护 大功率ESC和电机需独立供电(如24V锂电池),避免ESP32因电流过大损坏。 使用隔离DC-DC模块为ESP32供电,并确保电机电源线与信号线分开走线,加装磁环滤波。 2、ESC校准与通信协议 部分大功率ESC需校准(如发送最大/最小油门信号),否则可能无法启动。 双向ESC的PWM范围通常为1000μs(反转)至2000μs(正转),1500μs为停止。 3、闭环控制必要性 开环控制易因负载变化导致速度不稳定,需通过编码器实现PID闭环控制。 案例5中通过编码器反馈调整PWM输出,解决启动冲击和速度波动问题。 4、多电机同步与差速算法 机器人底盘需通过双电机差速实现转向(案例3),需精确计算左右轮速度。 需考虑轮距、轮半径等机械参数,避免转向半径过大或失控。 5、实时性与安全性设计 控制周期需稳定且低延迟(如<50ms),否则会导致轨迹震荡或响应迟缓。 必须设计硬件急停按钮,并在软件中设置超时检测(Watchdog),防止通信中断时电机失控。 注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






