|
804| 6
|
[项目] 【花雕】BLDC 实现双向旋转的 DRV8323RS、L6234 和自定义H桥 |
|
在 Arduino 驱动的无刷直流电机(BLDC)项目中,实现双向旋转是许多应用(如机器人底盘、电动工具)的核心需求。选择合适的驱动方案至关重要,它直接决定了系统的效率、功率和控制复杂度。DRV8323RS、L6234 和 自定义 H 桥 代表了三种不同层级的解决方案:分别是“集成化驱动器”、“单芯片三相驱动”和“从零搭建”。 1. DRV8323RS:集成化三相驱动器 DRV8323RS 是一款高度集成的栅极驱动器,通常配合外部 MOSFET 使用,专为三相电机设计。 (1)主要特点 * 高集成度与保护功能:它集成了三个半桥驱动器、电流检测放大器、降压稳压器和多种保护机制(如过流保护、欠压锁定、过温保护)。这意味着你不需要设计复杂的逻辑电路,只需关注 MOSFET 的选型。 * 灵活的控制接口:支持 PWM 和 SPI 两种控制模式。通过 SPI 接口,你可以读取电流数据、配置保护阈值,实现精细的闭环控制。 * 大功率潜力:虽然芯片本身有功率限制,但因为它驱动外部 MOSFET,通过选用大电流 MOSFET,该方案可以支持高达 60V 电压和数十安培的电流,适合大功率双向应用。 (2)应用场景 * 大功率电动工具:如电钻、电锯,需要高扭矩和正反转切换。 * 中型工业机器人关节:需要精确控制转矩和方向,且对散热有要求的场景。 * 电动滑板/代步车:需要高效能和可靠保护的轮毂电机驱动。 (3)注意事项 * MOSFET 选型匹配:必须仔细匹配 MOSFET 的阈值电压(Vgs)和 DRV8323RS 的驱动能力,防止 MOSFET 发热或开关速度不够。 * PCB 布局(Layout):由于涉及大电流和高频开关,PCB 布局非常关键。驱动芯片与 MOSFET 之间的走线应尽量短而粗,以减少寄生电感,防止电压尖峰。 * 散热设计:外部 MOSFET 在大电流下会产生大量热量,必须配备足够的散热片。 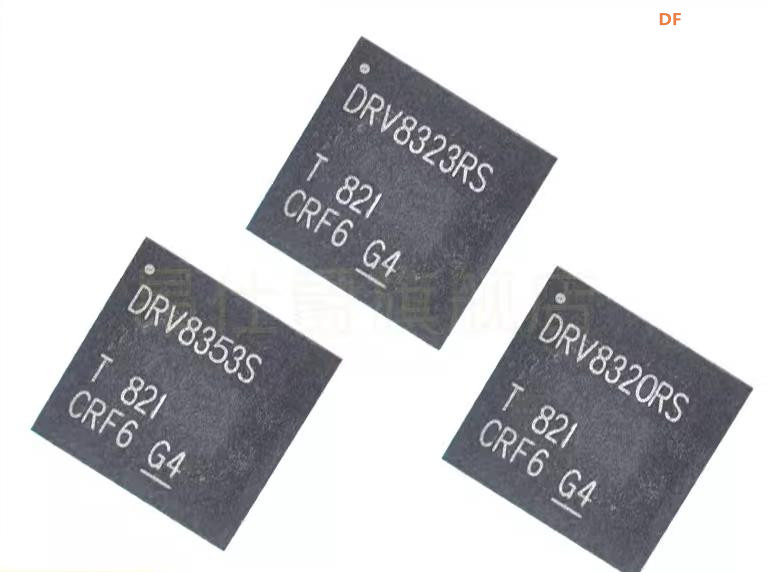 2. L6234:单芯片三相驱动 L6234 是一款将功率 MOSFET 和驱动逻辑集成在单一封装内的三相电机驱动器。 (1)主要特点 * 高度集成(Driver + MOSFET):它将三个半桥的驱动电路和功率开关都集成在一个芯片里,极大简化了电路设计,减少了外围元件数量。 * 易用性:它直接接受来自 Arduino 的 PWM 信号和方向逻辑信号。内置了续流二极管和保护电路(过流、过热),使用起来非常方便,类似于控制有刷电机的 L298N,但针对的是三相 BLDC。 * 双向控制:通过改变换向时序(即改变相序),可以轻松实现电机的正反转。 (2)应用场景 * 中小型 BLDC 风扇/鼓风机:需要双向送风或排气的 HVAC 系统。 * 计算机散热与服务器冷却:需要精确控制风扇转速和方向(虽然风扇通常单向,但某些特殊散热逻辑可能需要反转除尘)。 * 教育与原型开发:由于其接口简单,非常适合用于验证 BLDC 控制算法(如六步换向)的原型板。 (3)注意事项 * 功率限制:由于所有功率器件都在一个芯片内,其散热能力受限。通常最大持续电流在 3A-5A 左右(具体视封装和散热条件而定),不适合驱动大功率电机。 * 热管理:必须将芯片安装在散热片上,否则在中等负载下容易触发过热保护而关闭。 * 电压范围:需确保电源电压在 L6234 的额定范围内(通常最高 52V),避免击穿内部 MOSFET。 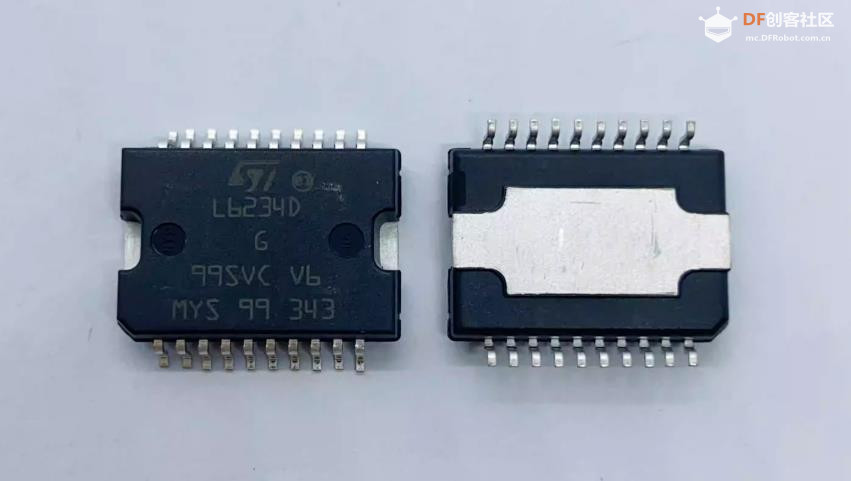 3. 自定义 H 桥方法(基于 MOSFET + 驱动电路) 这是一种“从零开始”的方法,使用分立元件(如 IR2101 驱动芯片 + 6 个 MOSFET)搭建三相全桥逆变电路。 (1)主要特点 * 极致的定制化:你可以根据需求选择任意规格的 MOSFET 和二极管,构建一个能承受数百伏电压和上百安培电流的驱动系统。 * 低成本(大批量):在批量生产时,使用分立元件通常比购买集成驱动芯片成本更低。 * 学习价值高:这种方法迫使你深入理解 BLDC 的换向原理、死区时间设置、米勒效应和续流回路,是理解电机驱动底层逻辑的最佳途径。 (2)应用场景 * DIY 电子调速器(ESC):无人机爱好者或模型玩家自制高性能 ESC。 * 高压工业设备:如你提到的 310V-380V 高压 BLDC 电机控制,市面上很难买到现成的低压驱动芯片能满足此电压,必须使用分立元件搭建。 * 低成本大规模产品:对成本极度敏感且有足够研发能力的消费电子产品。 (3)注意事项 * 直通风险(Shoot-through):这是最大的风险。如果同一相的上下两个 MOSFET 同时导通,会造成电源短路,瞬间烧毁 MOSFET。必须通过硬件逻辑电路或软件延时精确设置死区时间(Dead Time)。 * 复杂的 PCB 设计:需要极高的 PCB 布局技巧。驱动信号线要短,功率回路要粗,地线要单点接地,否则极易产生电磁干扰(EMI)或振荡。 * 缺乏保护:分立方案通常需要额外设计复杂的保护电路(如电流采样、电压检测),否则系统非常脆弱。 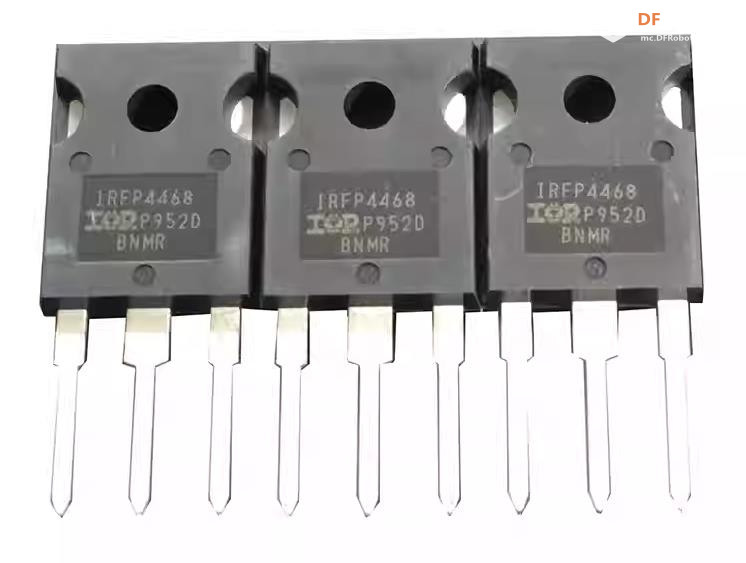   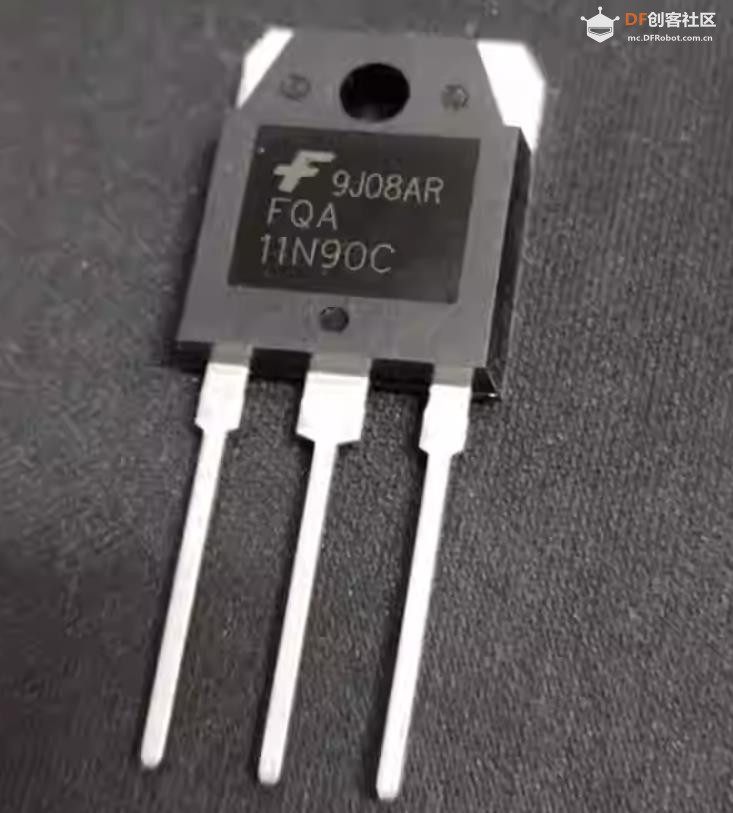 |
|
1、DRV8323RS三相全桥驱动方案 场景:高功率、高集成度的专业应用,需要完备的保护功能。 核心逻辑:SPI配置DRV8323 + 六步换相 + 故障保护。 |
|
2、L6234三相半桥驱动方案 场景:中等功率,需要简单的三相BLDC控制。 核心逻辑:使能控制 + PWM占空比调节 + 方向控制。 |
|
3、MOSFET H桥自制驱动方案 场景:低成本、定制化需求,或大功率特殊应用。 核心逻辑:IR2104半桥驱动 + 软件死区控制 + 电流采样。 要点解读 1、驱动IC选择的功率与集成度权衡 DRV8323RS:全集成解决方案,内置MOSFET、驱动器、电流检测、保护电路。案例一通过SPI接口可配置死区时间、电流限制、保护阈值。适合50V/30A以下应用,BOM简单但成本高。 L6234:三相半桥驱动器,需外接MOSFET。案例二通过6路PWM直接控制,结构简单。适合中等功率(40V/5A),但需外部电流检测和保护电路。 自定义H桥:案例三采用分立MOSFET + IR2104驱动器,成本最低,可扩展性最强,但设计最复杂。需自行处理死区时间、电流采样、保护电路。 2、死区时间(Dead Time)是硬件安全的核心 硬件死区:DRV8323内置可编程死区(400ns-2μs),通过SPI配置。案例一配置为400ns。 软件死区:自定义方案必须实现软件死区。案例三的writePWMwithDeadTime()函数中,先关闭一侧,delayMicroseconds(DEAD_TIME)后再开启另一侧,防止直通短路。1000ns是保守起点,实际需根据MOSFET开关速度调整。 3、电流采样方案决定控制精度 低侧采样:最简单,案例三在每相低侧MOSFET源极接采样电阻。但只能在下管导通时采样,有盲区。 高侧采样:需专用高侧电流传感器(如INA240),成本高。 集成采样:DRV8323内置三个差分电流放大器,案例一通过DRV_SO_x读取。可实时采样任意两相电流,计算第三相,实现真正的FOC。 4、保护电路的完备性 DRV8323:案例一读取DRV_nFAULT引脚,可检测过流、过温、欠压、短路。故障寄存器可定位具体故障类型。 L6234:只有过温关断,案例二需在L6234_SENSE引脚外接采样电阻实现过流保护。 自定义方案:需实现所有保护:案例三的电流保护、欠压保护、过温保护(需NTC)。硬件比较器应作为最后防线,软件保护有延迟。 5、PWM频率与MOSFET选型 频率选择:BLDC常用8-20kHz。案例一默认使用Arduino的490Hz/980Hz,必须提高频率以减少电机噪音。案例二通过修改TCCR1B寄存器提高到31.25kHz。 MOSFET选型:自定义方案的关键参数: Vds:至少2倍母线电压(24V系统选60V以上) Rds(on):决定导通损耗,<10mΩ Qg:栅极电荷,影响开关速度,决定驱动电流需求 SOA:安全工作区,防止二次击穿 栅极驱动:IR2104是经济选择,但驱动能力有限。大功率MOSFET需专用驱动器(如IRS21864)。 |
4、DRV8323RS SPI配置双向旋转代码(基于STM32F407移植) |
5、L6234库实现双向旋转代码(基于Arduino Mega) |
6、自定义H桥双向旋转代码(基于L298N模块)要点解读 1、驱动拓扑选择 DRV8323RS:集成栅极驱动+电流检测,适合高性能场景(如无人机云台),需SPI配置寄存器实现灵活控制。 L6234:全集成三相驱动,简化硬件设计,但需配合外部PWM生成器(如Arduino的Timer库)。 自定义H桥:成本最低,但需自行处理死区时间、直通保护等问题,仅适用于低功率电机。 2、双向旋转实现机制 换相序列:BLDC需通过改变三相导通顺序实现转向(如正转顺序:U→V→W,反转顺序:U→W→V)。 PWM相位控制:高级方案(如DRV8323RS)通过调整高侧/低侧PWM相位差实现正反转,需配合硬件定时器生成6路PWM。 简易方案:如L298N通过交换H桥输入极性实现反转,但效率低于三相换相。 3、保护机制实现 DRV8323RS:内置过流、过温、欠压保护,需通过寄存器配置阈值(如IDRIVE参数设置栅极驱动电流)。 L6234:依赖外部电路实现保护(如串联保险丝、并联TVS二极管)。 自定义H桥:需软件实现过流检测(如采样电阻+ADC)和硬件互锁电路防止直通。 4、反馈控制优化 闭环控制:需集成编码器(如ABZ相)或霍尔传感器,通过PID算法实现速度/位置控制(示例代码中未体现,实际需结合Encoder.h库)。 开环控制:如L298N方案依赖固定PWM占空比,易受负载变化影响。 5、硬件设计要点 电源隔离:电机驱动部分与Arduino逻辑部分需独立供电(如DRV8323RS的DVDD与AVDD分离)。 散热设计:高功率场景(如L6234驱动2A以上电流)需加散热片或风扇。 电磁兼容:电机线与信号线分开布线,长距离传输时使用屏蔽线。  注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






