|
23289| 53
|
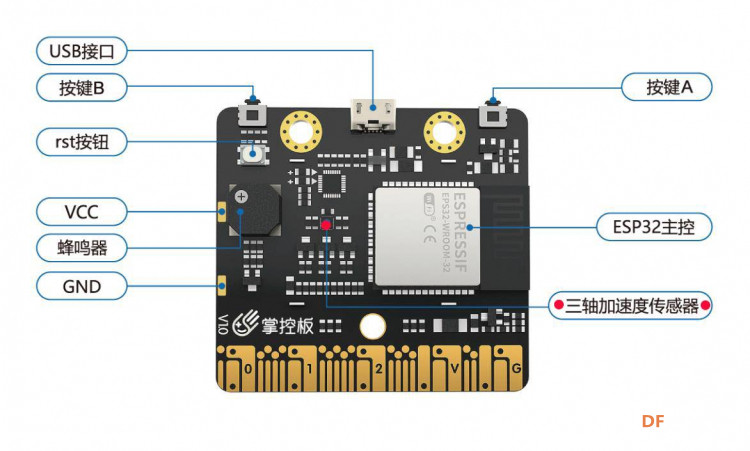
[MP动手做] MicroPython动手做(20)——掌控板之三轴加速度 |
|
10、使用“摇晃”指令的计步器 #MicroPython动手做(20)——掌控板之三轴加速度 #使用“摇晃”指令的计步器 |
|
15、倾斜和摇晃的一双眼睛 #MicroPython动手做(20)——掌控板之三轴加速度 #倾斜和摇晃的一双眼睛(应用字典函数) 字典 字典是一种可变容器模型,且可存储任意类型对象,格式如 d = {key1 : value1, key2 : value2},键必须是唯一的,但值则不必。 |
|
17、掌控闪灯大量程计步器(十万步) #MicroPython动手做(20)——掌控板之三轴加速度 #掌控闪灯大量程计步器(十万步) 注解 使用摇晃模块,优点是算法简单,不足之处是触发计步的阙值是固定的,不能调整 |
|
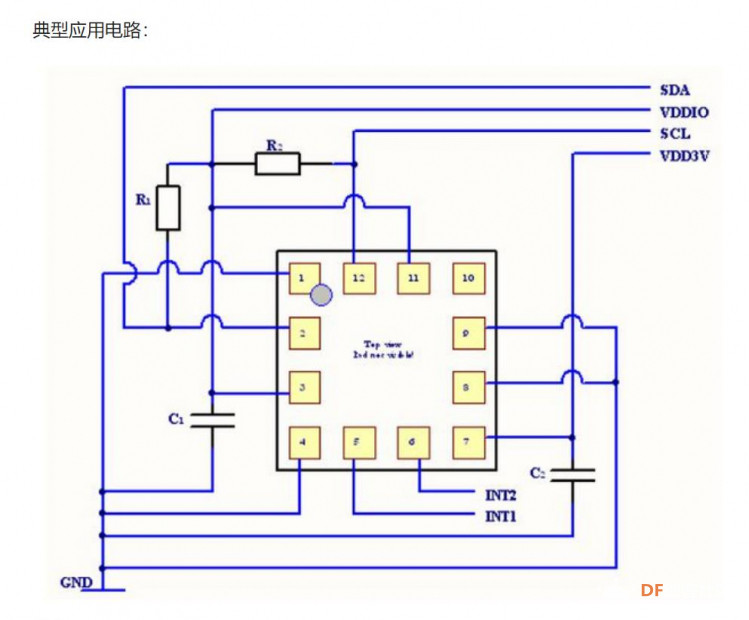
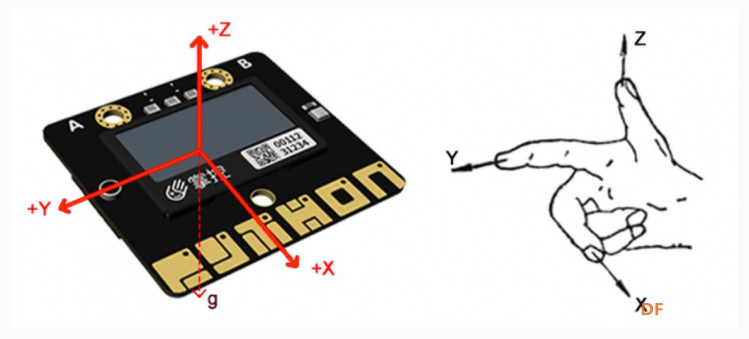
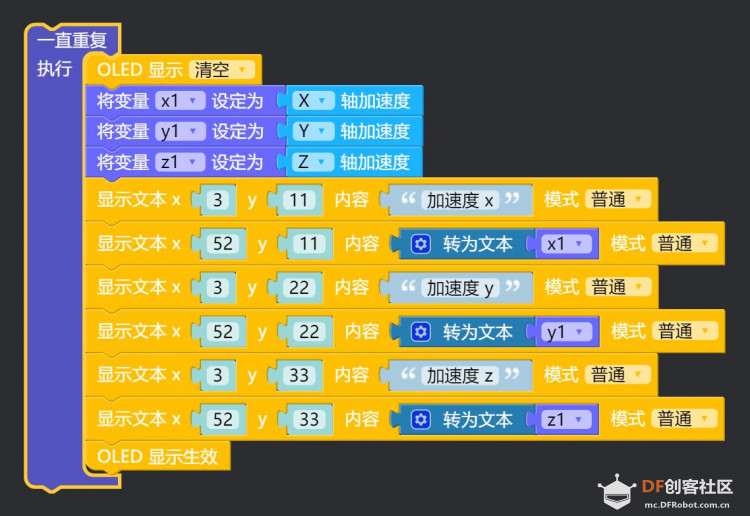
[mw_shl_code=applescript,false]#MicroPython动手做(20)——掌控板之三轴加速度 #简单测试3个轴加速度值的变化 from mpython import * while True: oled.fill(0) x1 = accelerometer.get_x() y1 = accelerometer.get_y() z1 = accelerometer.get_z() oled.DispChar('加速度 x', 3, 11, 1) oled.DispChar((str(x1)), 52, 11, 1) oled.DispChar('加速度 y', 3, 22, 1) oled.DispChar((str(y1)), 52, 22, 1) oled.DispChar('加速度 z', 3, 33, 1) oled.DispChar((str(z1)), 52, 33, 1) oled.show()[/mw_shl_code] 使用前,导入mpython模块: from mpython import * 获取X、Y、Z三轴的加速度: x1 = accelerometer.get_x() y1 = accelerometer.get_y() z1 = accelerometer.get_z() 注解 通过 accelerometer.get_x() 获取3轴加速度。获取3轴加速度获取方法分别为 get_x() 、get_y() 、get_z() 。 每个轴的测量值根据方向是正数或负数,表示以克为单位的值。 可以尝试掌控板按以下放置,观察3轴数据: 平放桌面 --(0,0,-1) 翻转平放桌面 --(0,0,1) 掌控板下板边直立与桌面 --(1,0,0) 掌控板左板边直立与桌面 --(0,1,0) 注解 发现什么规律没有?当重力加速度与加速度轴方向一致时,即等于1g的地球重力加速度。正方向为+1g,反方向为-1g。 假如猛烈地摇动掌控板,就会看到加速度达到±2g,那是因为这个加速度计的最大测量值为±2g。 |
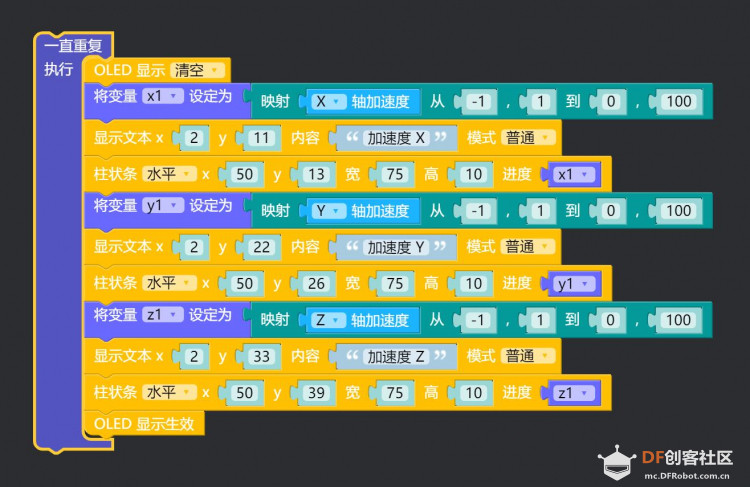
3、使用柱状条演示不同状态下的三轴加速度值 |
|
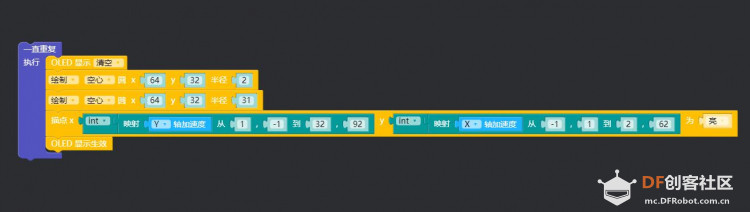
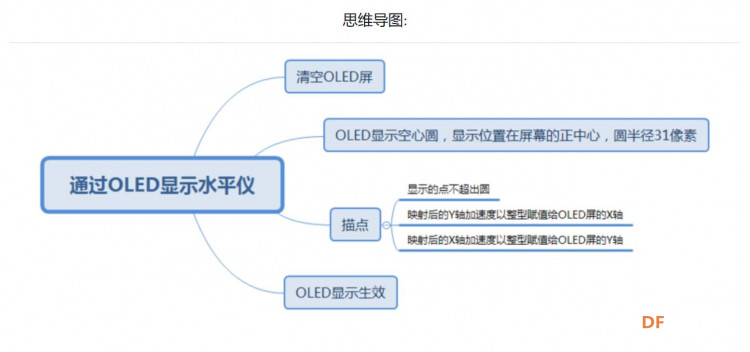
4、用加速度制作一个上下左右各滚动的水平球(小点) 描述:OLED屏幕是128*64像素,OLED屏长为X轴,宽为Y轴。可以画一个圆,半径为31像素,让“点”不会超出这个范围,确定点的位置用加速度X、Y轴。小球不超出中心小圆圈为大致处于水平位置。 加速度Y轴倾斜的值是范围1至-1,向左倾斜往1增大,向右倾斜往-1增大。通过映射把Y轴加速度的取值范围变为32至92,可以让Y轴加速度的值在OLED屏幕的中心点显示位置。 加速度X轴倾斜的值是范围-1至1,向前倾斜往-1增大,向后倾斜往1增大。通过映射把Y轴加速度的取值范围变为2至62。可以让X轴加速度的值在OLED屏幕的中心点显示位置。 映射的值有小数点,OLED屏幕是无法识别小数点的,需要将映射后的值以整型输出。 [mw_shl_code=applescript,false]#MicroPython动手做(20)——掌控板之三轴加速度 #用加速度制作一个上下左右各滚动的水平球(小点) from mpython import * while True: oled.fill(0) oled.circle(64, 32, 2, 1) oled.circle(64, 32, 31, 1) oled.pixel((int(((92 - 32) / ((-1) - 1)) * (accelerometer.get_y() - 1) + 32)), (int(((62 - 2) / (1 - (-1))) * (accelerometer.get_x() - (-1)) + 2)), 1) oled.show()[/mw_shl_code] |
5、三轴绿灯水平测量仪 |
|
当检测到掌控板在X轴和Y轴方向倾斜时(范围-1g 至+1g),将X轴、Y轴的偏移值也就是加速度值(范围-1至1)分别映射在以设定的中心点为原点的X坐标上的Y坐标(范围32至-32)、X坐标(范围-64至64)上: if y<=1 and y>=-1: offsetX=int(numberMap(y,1,-1,-64,64)) if x<=1 and x>=-1: offsetY=int(numberMap(x,1,-1,32,-32)) 注解 numberMap(inputNum, bMin, bMax, cMin, cMax) 是映射函数,inputNum 为需要映射的变量,bMin 为需要映射的最小值,bMax 为需要映射的最大值,cMin 为映射的最小值,cMax 为映射的最大值。 水平球在X、Y坐标上的移动:水平球在坐标上的移动 = 中心点位置 + 加速度的偏移值: move_x=Center_x+offsetX move_y=Center_y+offsetY 如果水平球移动到中心位置,则亮绿灯,否则不亮灯: if offsetX==0 and offsetY==0: rgb.fill((0,20,0)) #水平球在中心位置亮绿灯,亮度为20 rgb.write() else: rgb.fill((0,0,0)) #水平球不在中心位置灭灯 rgb.write() |
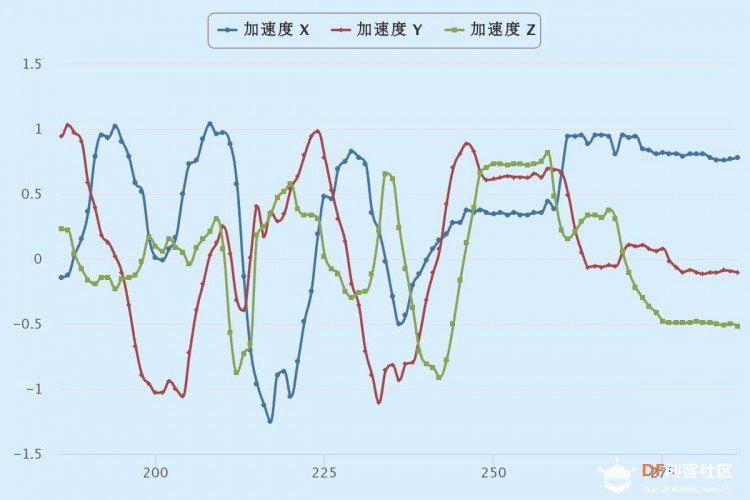
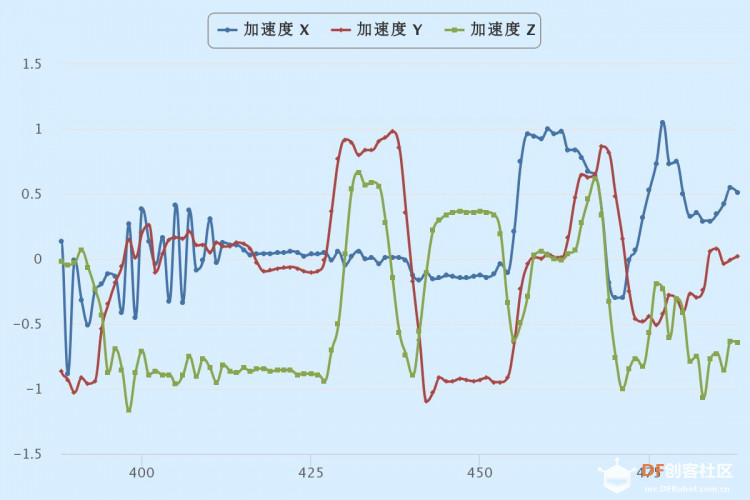
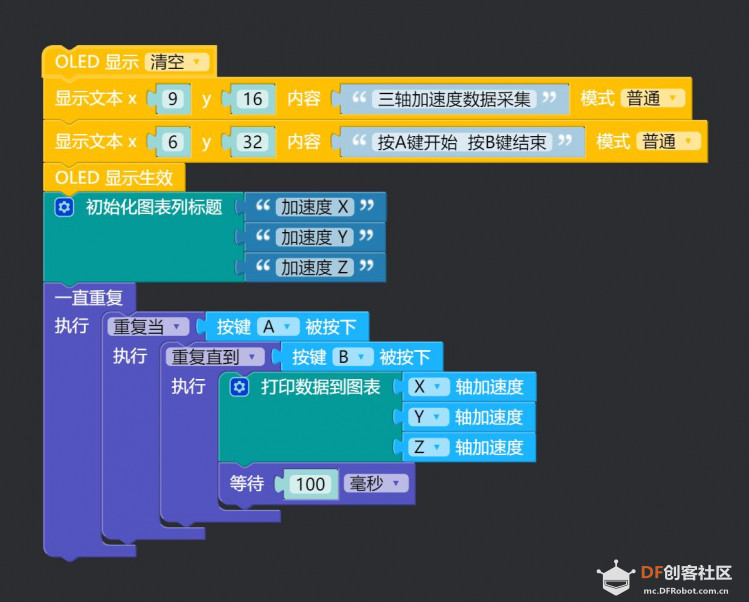
6、尝试三轴加速度数据探究采集 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






