|
14206| 11
|
【MaixPy 教程】用mixly玩转K210——人脸追踪 |

【MaixPy 教程】用mixly玩转K210——人脸追踪
【MaixPy系列教程:】
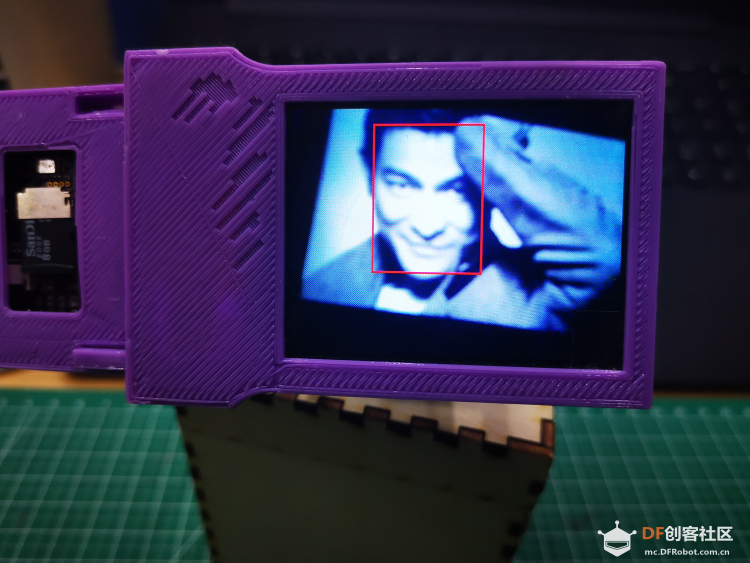
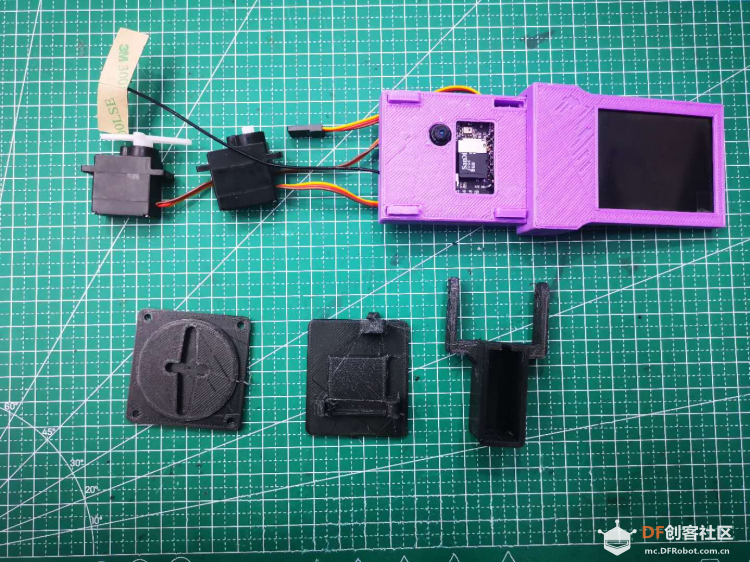
前言之前在sipeed blog 看到一篇教程:【MaixPy 人脸追踪云台教程】里面用到了代码编程和pid算法!但对于小朋友或者初学者入门比较难,今天就让我带领大家用图形化编程编写一个 人脸追踪案例!好了废话不多说!Let's Go!!! 准备阶段所需要材料
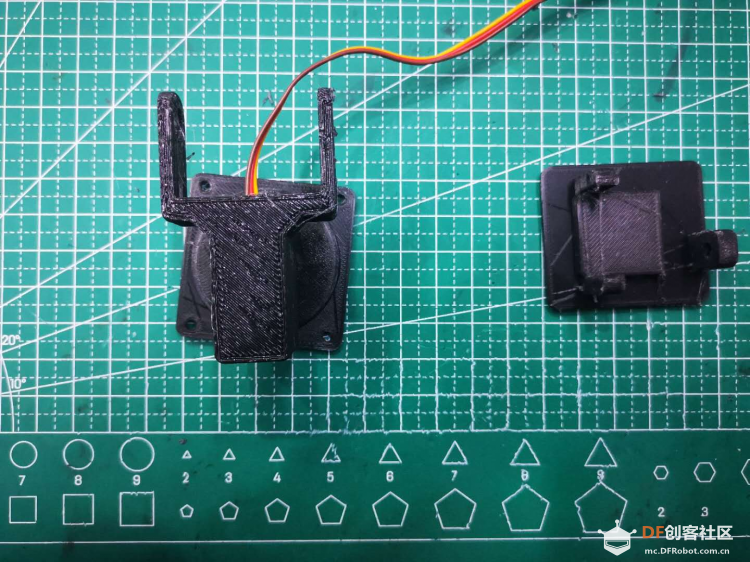
1、需要一个舵机云台(可以3D打印mini 舵机云台或者在某宝买一个 云台组装1、组装X轴舵机(ps:控制摄像头水平方面的移动)
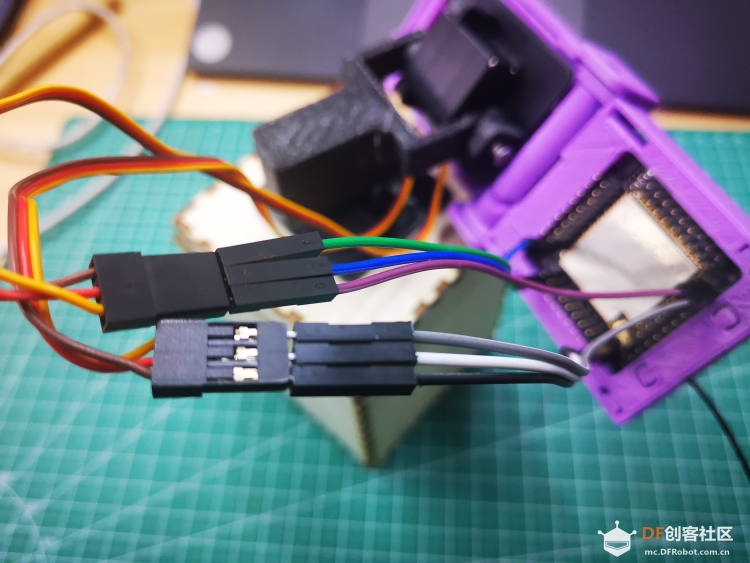
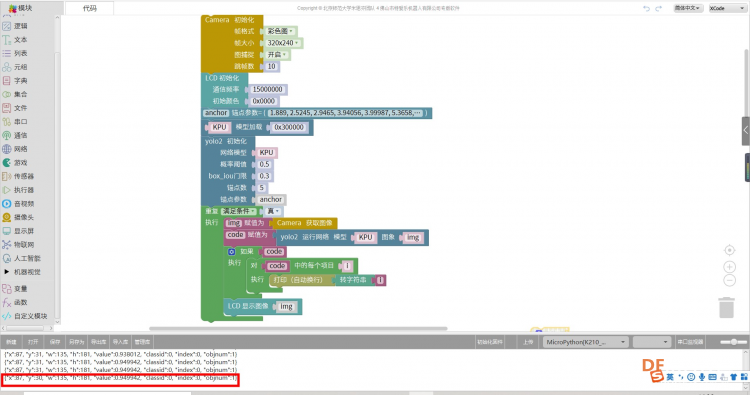
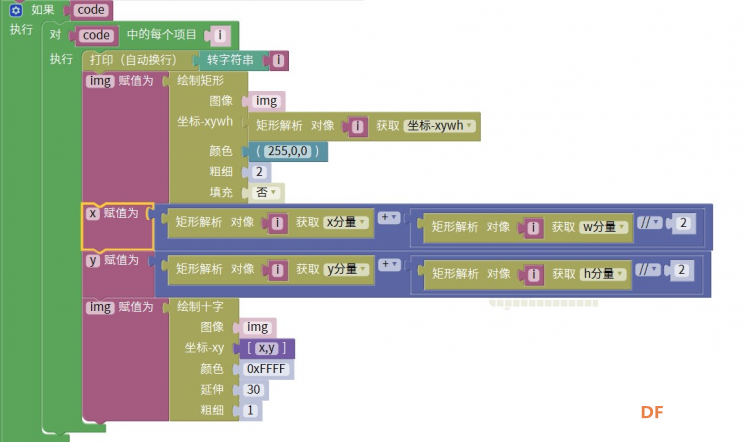
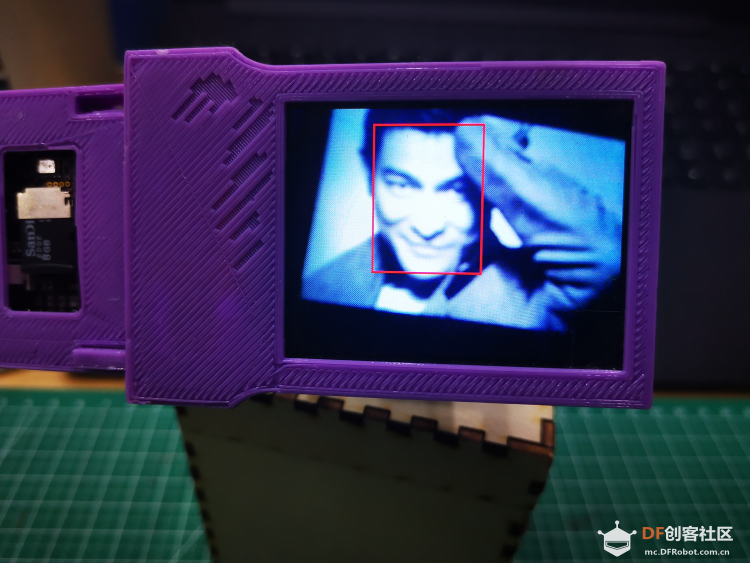
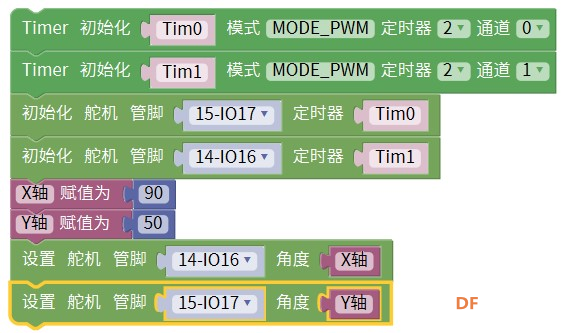
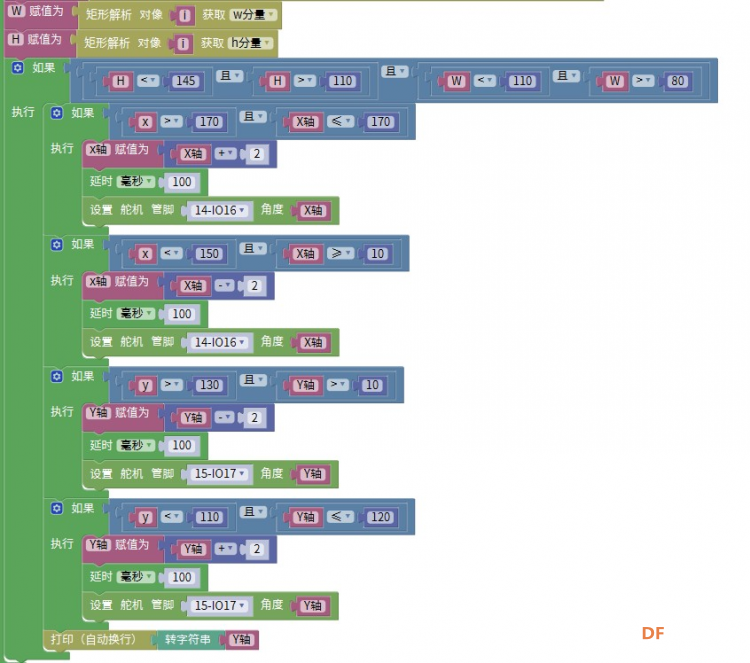
我们将底部舵机的信号线连接至dock的16脚,第二个舵机的信号线连接至17脚。(如果连接反,后面的动作会异常,交换两根线即可【mixly中自己重新写入了io-17、io-16】) 程序编写1、刷入人脸检测模型人脸模型可以在maixhub下载或者百度网盘下载(链接: https://pan.baidu.com/s/1007krAq_oZspySxmnAVPkw 提取码: caeg 复制这段内容后打开百度网盘手机App,操作更方便哦) 人脸检测1、首先将我们的摄像头、显示屏、和KPU进行初始化后,获取摄像头的图片,用yolo2运行网络积木块,获取图像的信息,返回一个字典(我们需要用到的是"x","y","w","h"等键所对应的值)。具体操作如下: 人脸追踪首先我们需要定义两个定时器和初始化兩個舵機。
程序演示 Mini_Pan_Tilt_-_Servo_G9.zip Mini_Pan_Tilt_-_Servo_G9.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






