本帖最后由 云天 于 2022-10-5 09:14 编辑
毫米波雷达模块可进行人体呼吸等微动感应,检测距离挂高3m,静止人体检测覆盖半径1-3m,人体存在检测更精准,拒绝漏报。
本项目将制作两个人体检测灯,一个为毫米波灯,一个人体红外灯,进行对比。
【5.8G微波雷达模块】
这是一款高灵敏度5.8G Hz毫米波人体存在检测雷达模块。区别于传统只能通过检测人体大幅度的动作来判断是否有人存在不同,本模块能以极高灵敏度的检测人体呼吸等微小运动来判断是否有人存在。因此无论人体是处于静坐,睡觉等状态都可以准确感知到人员存在。感应结果可以选择通过串口输出或通过I/O口高低电平输出,并且传感器模块具有感应可靠性强、灵敏度高、体积小、使用简单、抗干扰强、易于嵌入集成等特点。
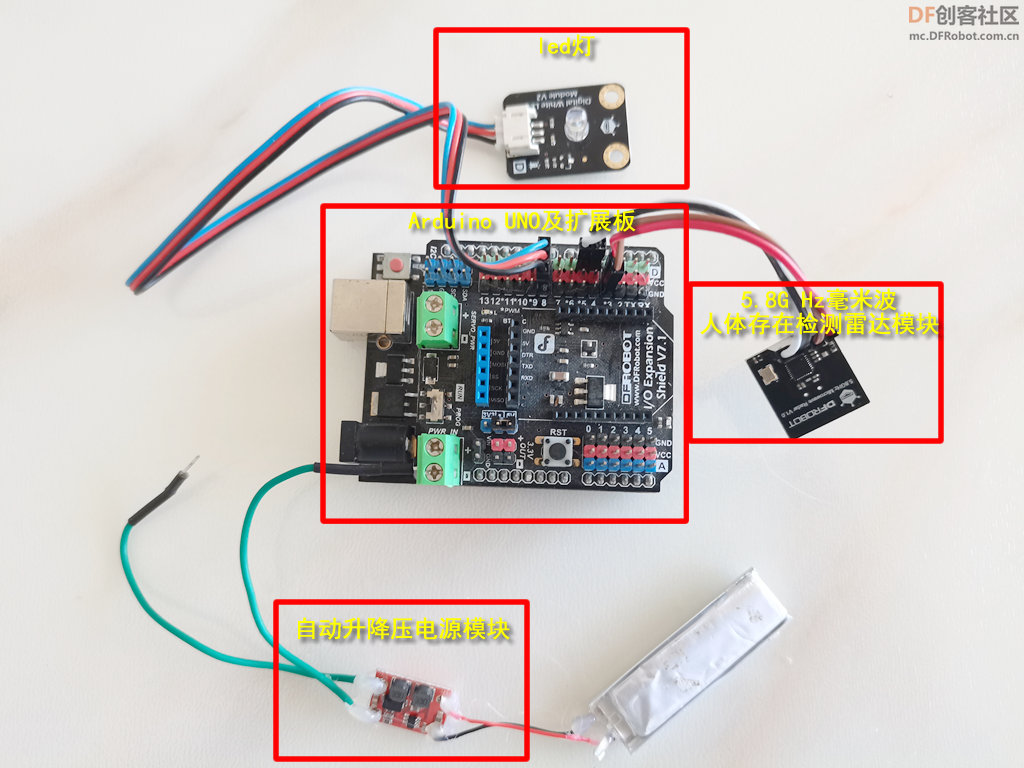
1、接线图
2、实物连接图
电池使用3.7V锂电池,为给Arduino板供电,需要升压模块。
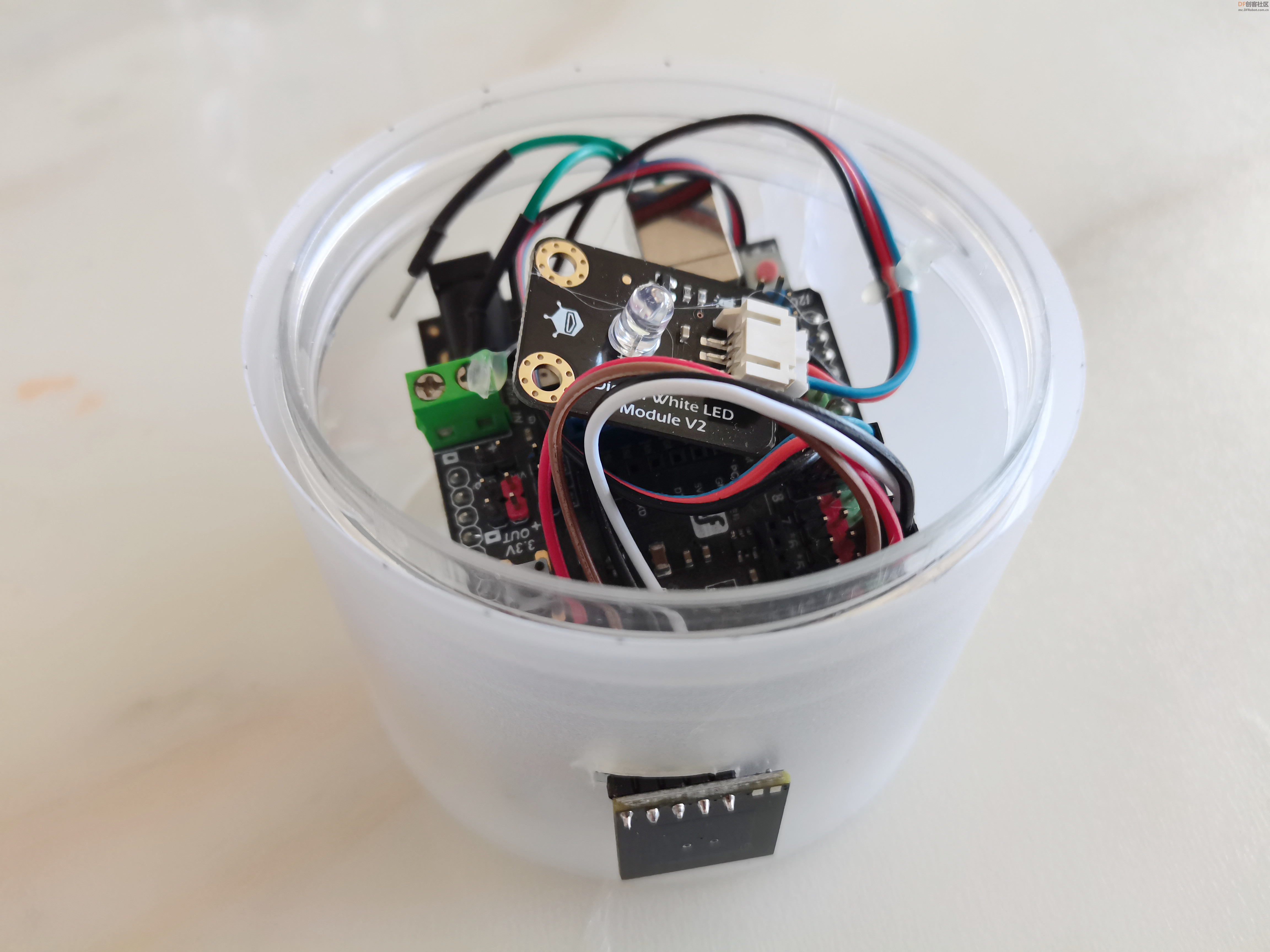
3、毫米波小夜灯组装
4、Arduino编程
DFRobot_Microwave_Radar_Module库,点击下载DFRobot_Microwave_Radar_Module库
同时设置13引脚,使用板上LED灯,显示运行情况。
- #include "DFRobot_Microwave_Radar_Module.h"
-
- #if (defined(ARDUINO_AVR_UNO) || defined(ESP8266)) // 使用软串口
- SoftwareSerial softSerial(/*rx =*/4, /*tx =*/5);
- DFRobot_Microwave_Radar_Module Sensor(/*softSerial =*/&softSerial);
- #elif defined(ESP32) // 使用 可重映射引脚的 硬串口 : Serial1
- DFRobot_Microwave_Radar_Module Sensor(/*hardSerial =*/&Serial1, /*rx =*/D3, /*tx =*/D2);
- #else // 使用硬串口 : Serial1
- DFRobot_Microwave_Radar_Module Sensor(/*hardSerial =*/&Serial1);
- #endif
-
- int ledPin = 8;
- int bs=0;
- void setup()
- {
-
- //初始化传感器
- while ( !( Sensor.begin() ) ) {
-
- delay(3000);
- }
-
- pinMode(ledPin, OUTPUT);
-
- /**
- @brief 恢复出厂设置
- */
- Sensor.factoryReset();
-
- /**
- @brief 配置检测距离,0~11米,默认为6米
- */
- Sensor.detRangeCfg(6);
-
- /**
- @brief 配置检测灵敏度,0~9数值越大,灵敏度越高,默认为7
- */
- Sensor.setSensitivity(7);
-
- /**
- @brief 配置输出延时时间
- */
- Sensor.outputLatency(0.2, 5);
-
- /**
- @brief 配置输出输出控制信号接口极性
- */
- Sensor.setGpioMode(1);
- }
-
- void loop()
- {
- int val = Sensor.readPresenceDetection();
- digitalWrite(ledPin, val);
- digitalWrite(13, bs);
- bs=1-bs;
- }
【人体红外灯】
为与毫米波灯对比,另外制作一个“人体红外灯”。
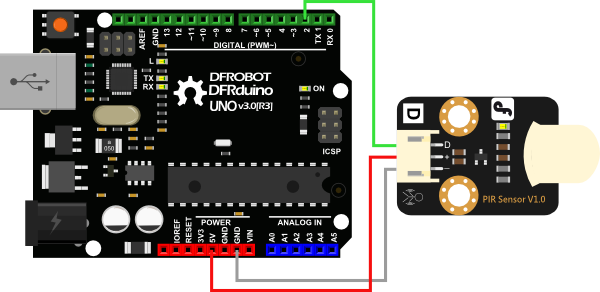
1、人体红外热释电运动传感器
红外热释电运动传感器能检测运动的人或动物身上发出的红外线,输出开关信号,可以应用于各种需要检测运动人体的场合。
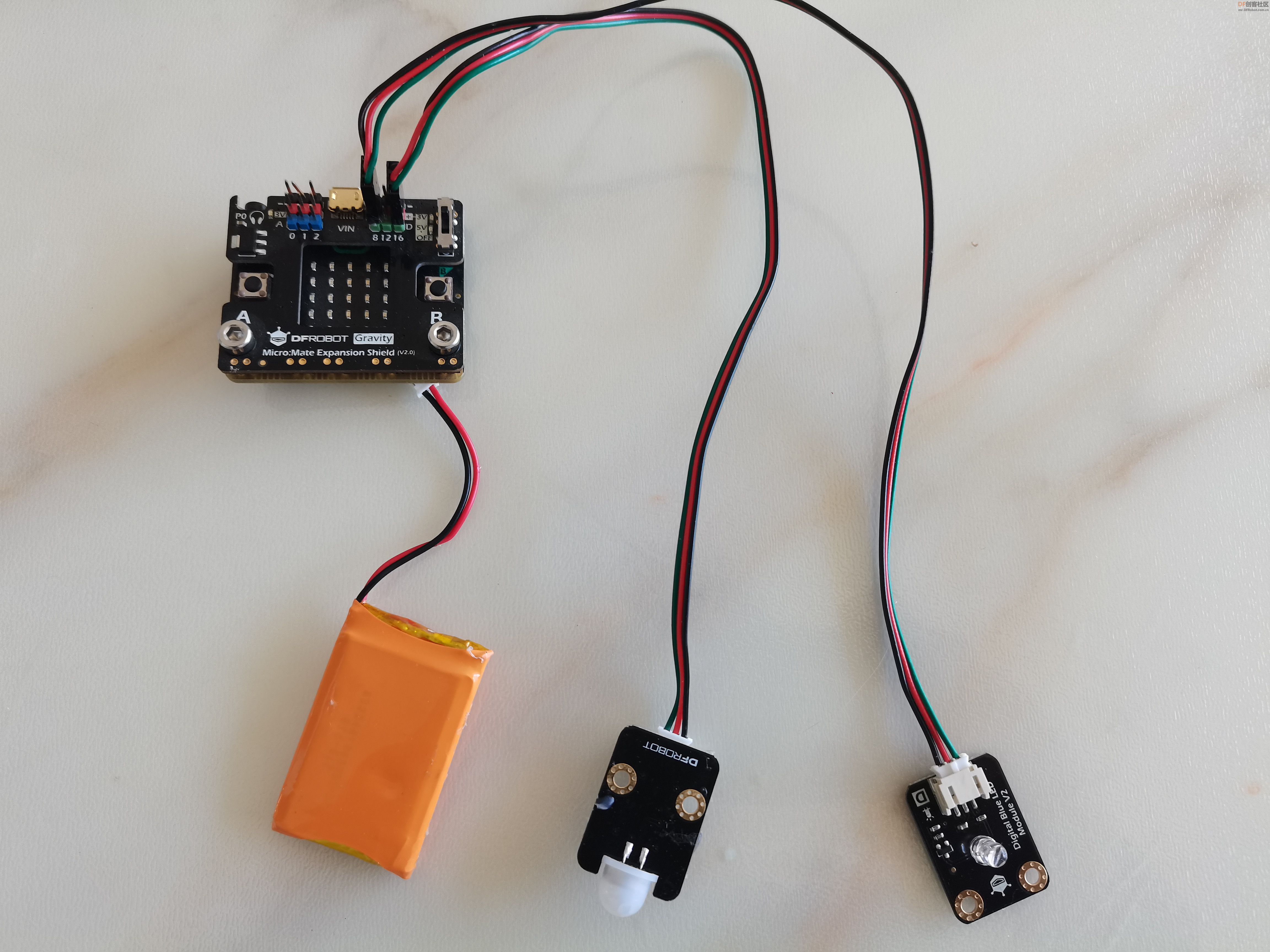
2、接线图
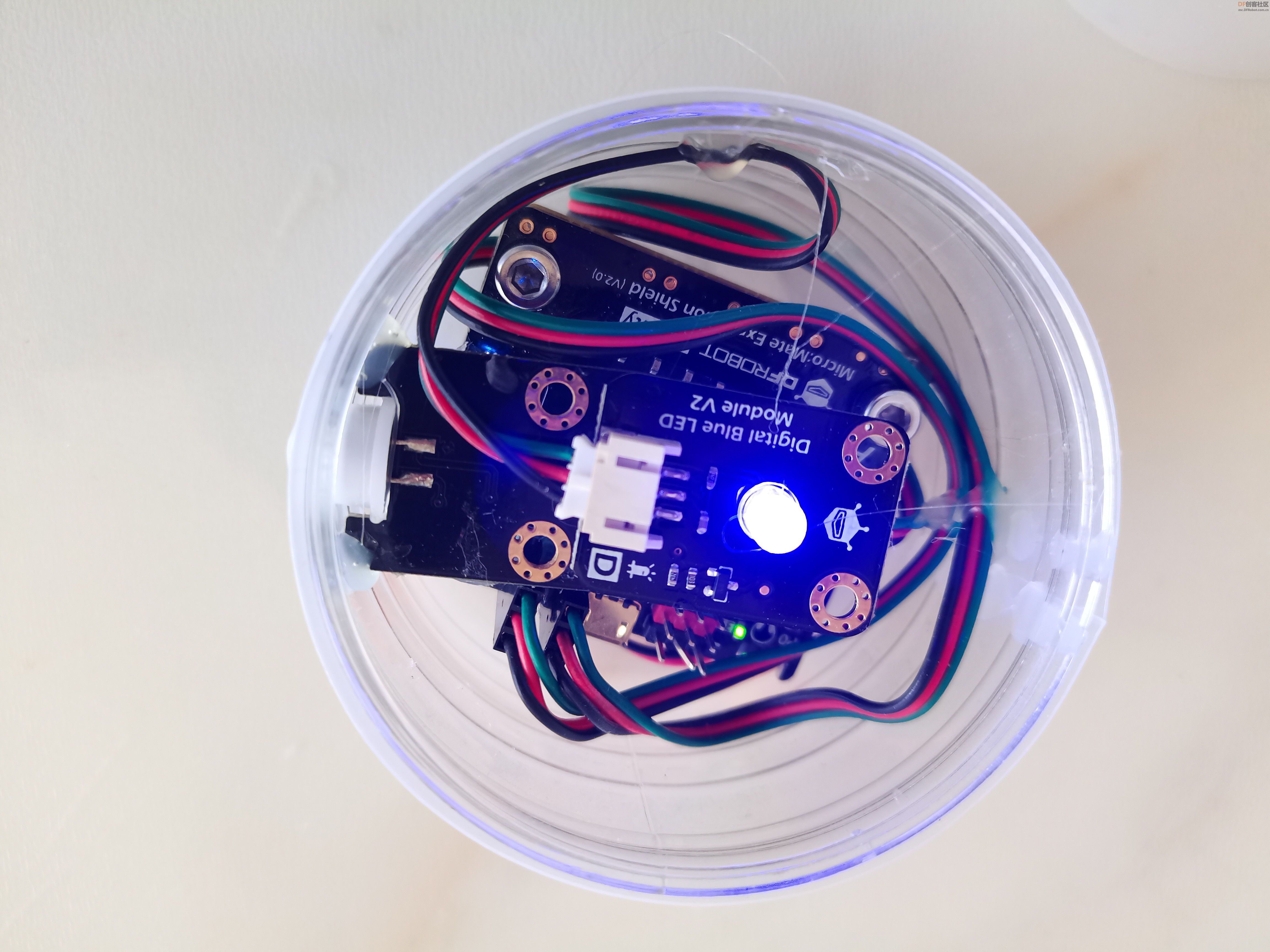
3、实物连接图
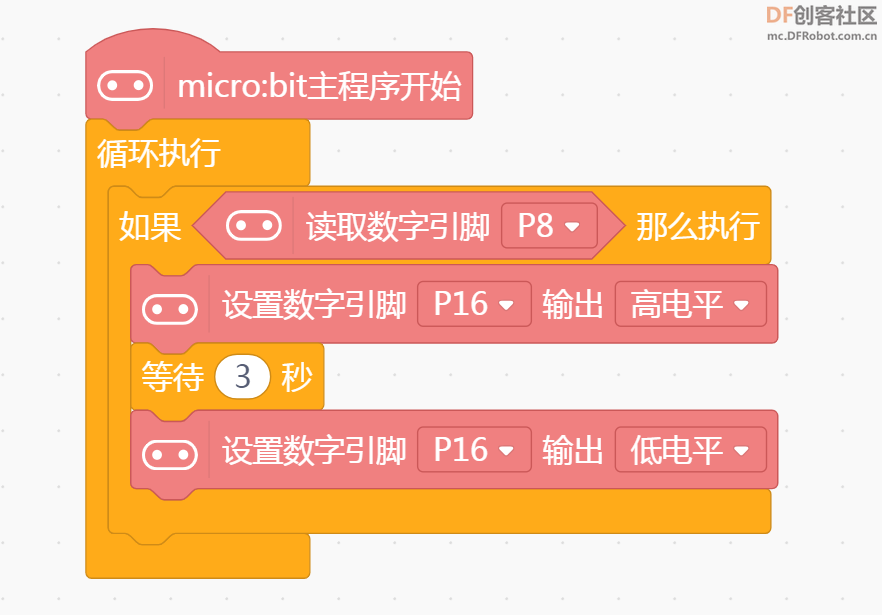
4、Mind+编程
【两灯比对】
当人长时间不动,人体红外灯熄灭后不再亮,而毫米波灯可以检测到人的存在,而会亮灯。
【演示视频】
|
|
|
|
|
|
|
|
|
|








 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






