|
1411| 1
|
[项目] 基于 FireBeetle 2 ESP32-P4 + ESP-Claw 四驱车 |

|
本帖最后由 云天 于 2026-5-30 21:21 编辑 关键词:ESP-Claw、FireBeetle 2 ESP32-P4、飞书机器人、AI 边缘计算、L298N、语音控制 【项目简介】 你是否想过,只需对着手机说句话,就能让小车自动执行复杂的动作序列?在这个项目中,我们将 DFRobot FireBeetle 2 ESP32-P4 开发板与 ESP-Claw 边缘 AI 智能体框架结合,通过 飞书(Lark)App 的语音转文字功能,实现"聊天即造物"——用自然语言直接控制四轮小车和 WS2812 流水灯。 核心亮点:
【项目背景:什么是 ESP-Claw?】 ESP-Claw 是由乐鑫及社区推出的面向物联网设备的 Chat Coding(聊天造物) 式 AI 智能体框架。与传统 IoT"云端规则引擎 + 手机 App"的架构不同,ESP-Claw 实现了:
【硬件准备】
【硬件接线】 1. 详细接线说明 L298N 电机驱动连接
WS2812B 灯带连接
供电方案
关键提醒:L298N 的 GND 必须与 FireBeetle 2 的 GND 连接在一起(共地),否则电机驱动信号无法被正确识别! 【硬件安装】 1.锂电池亚克力盒 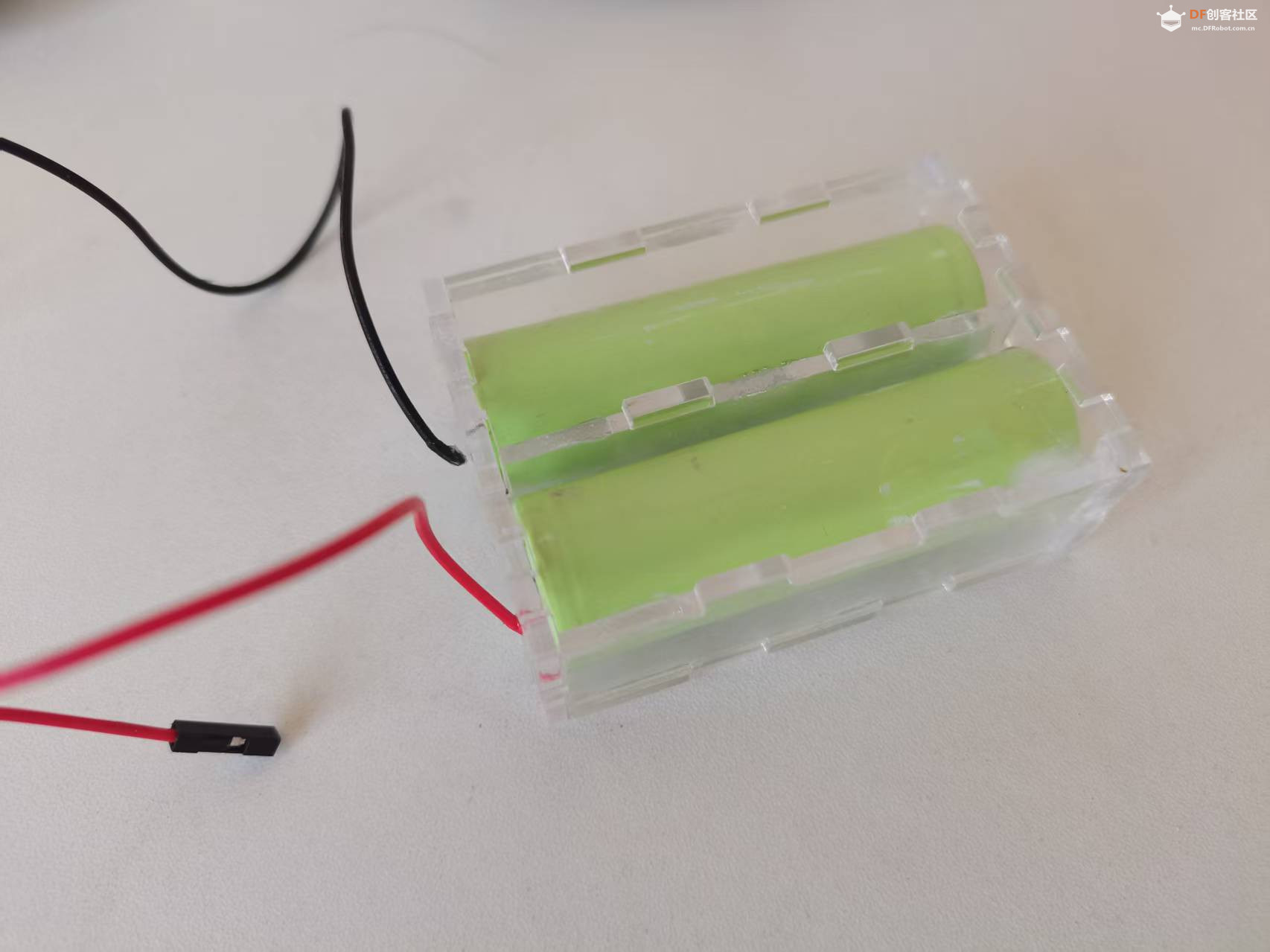 2.电机亚克力架 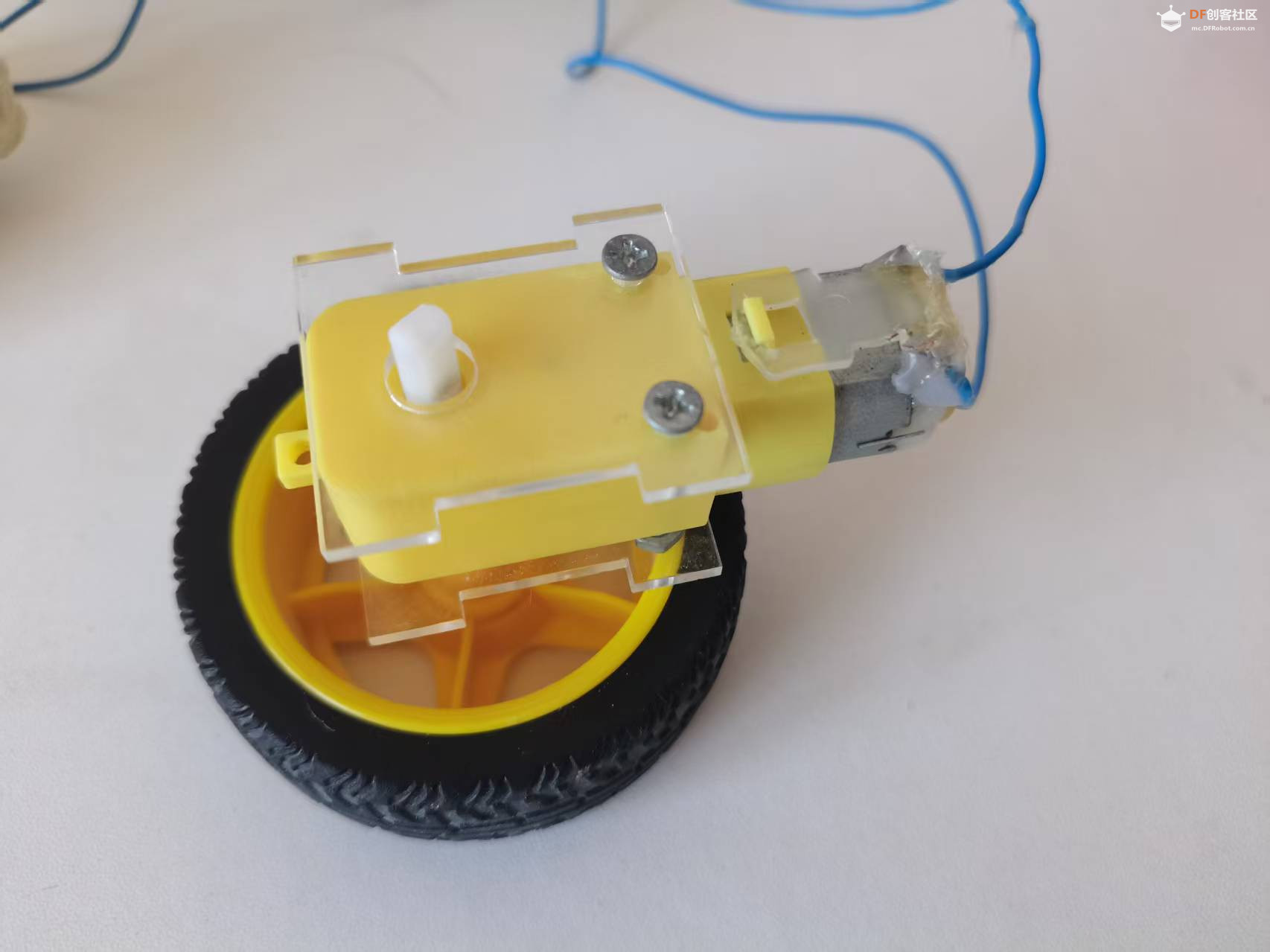 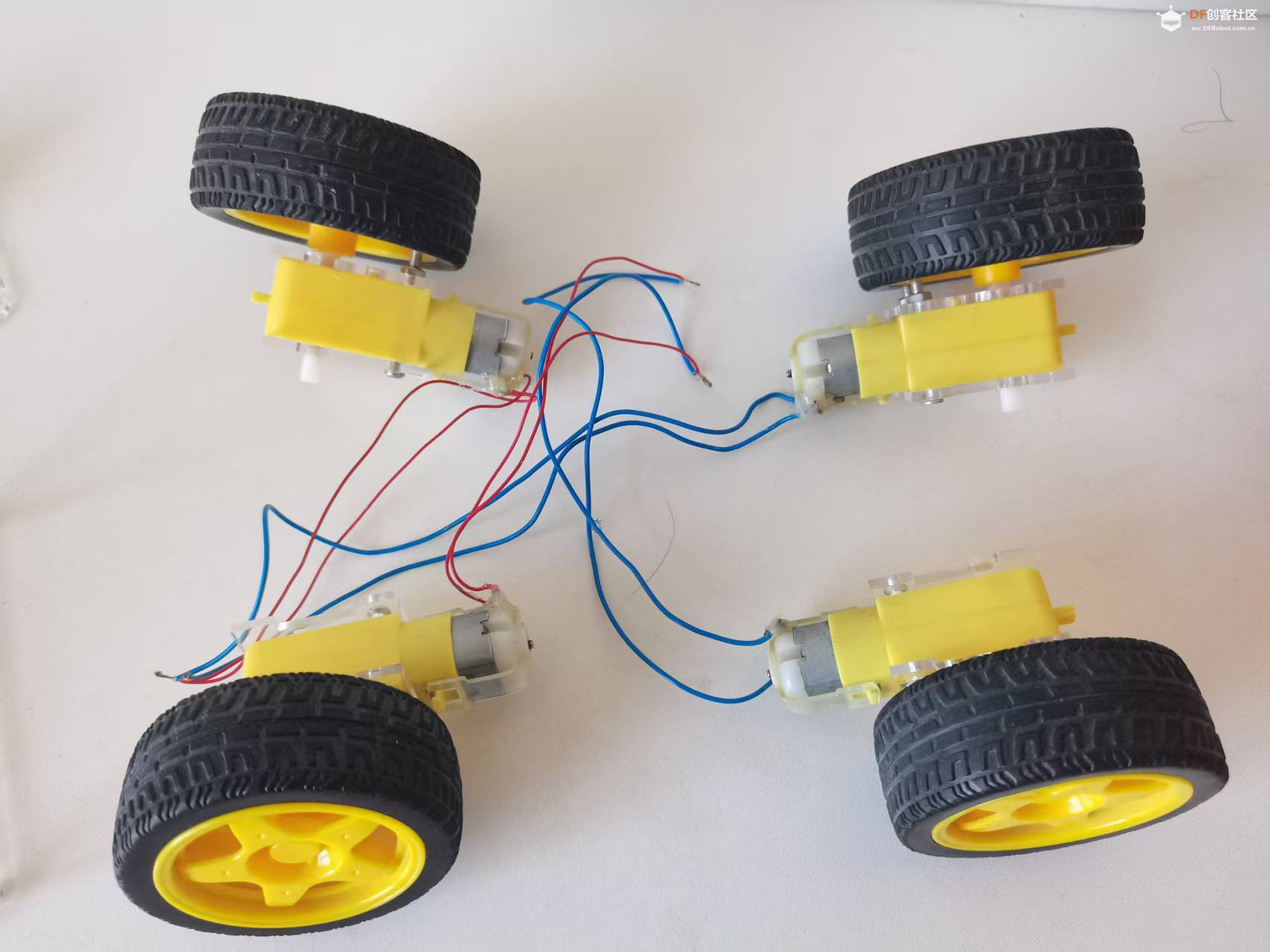 3.车底架 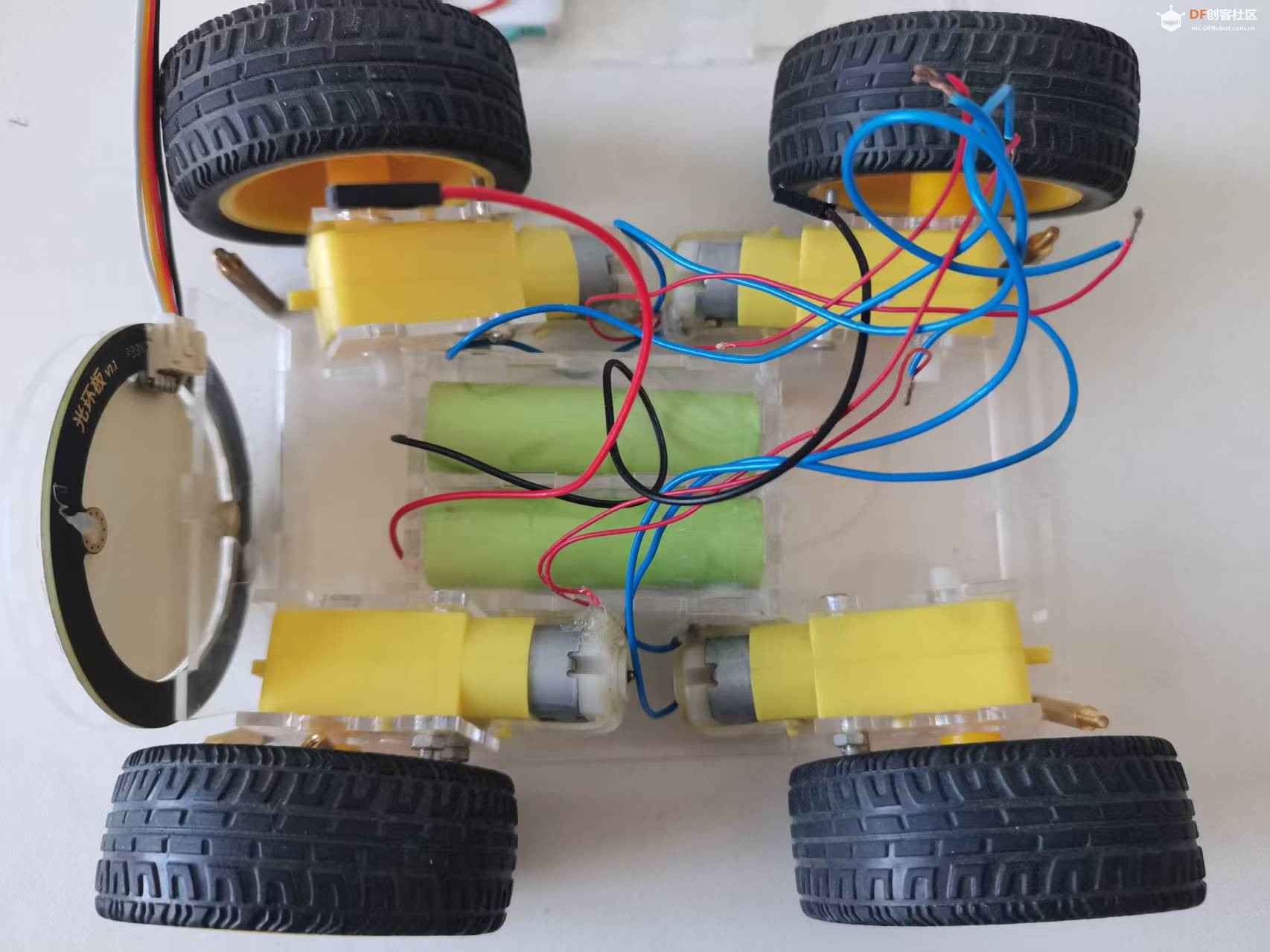 4.P4主控和电机驱动 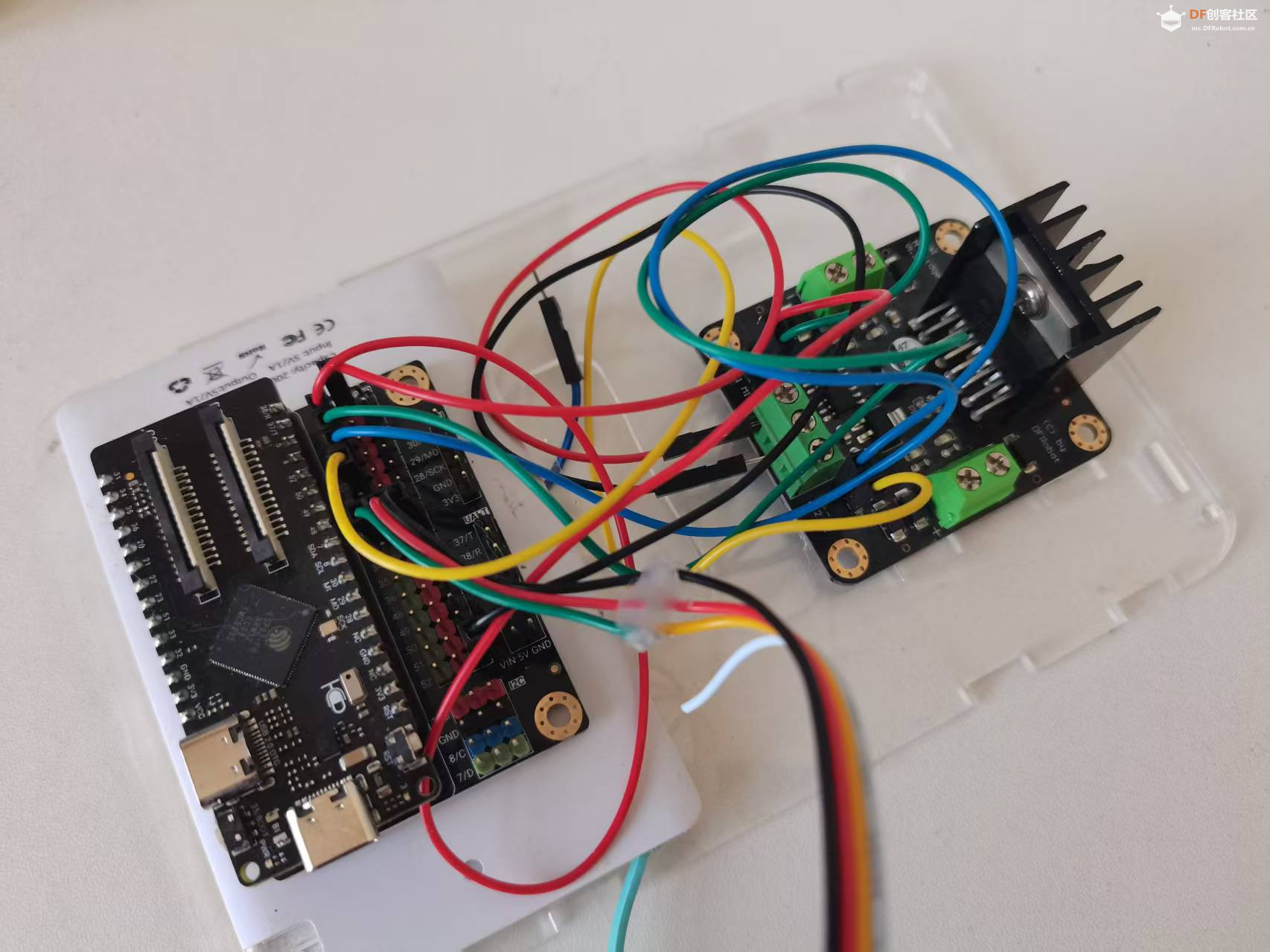 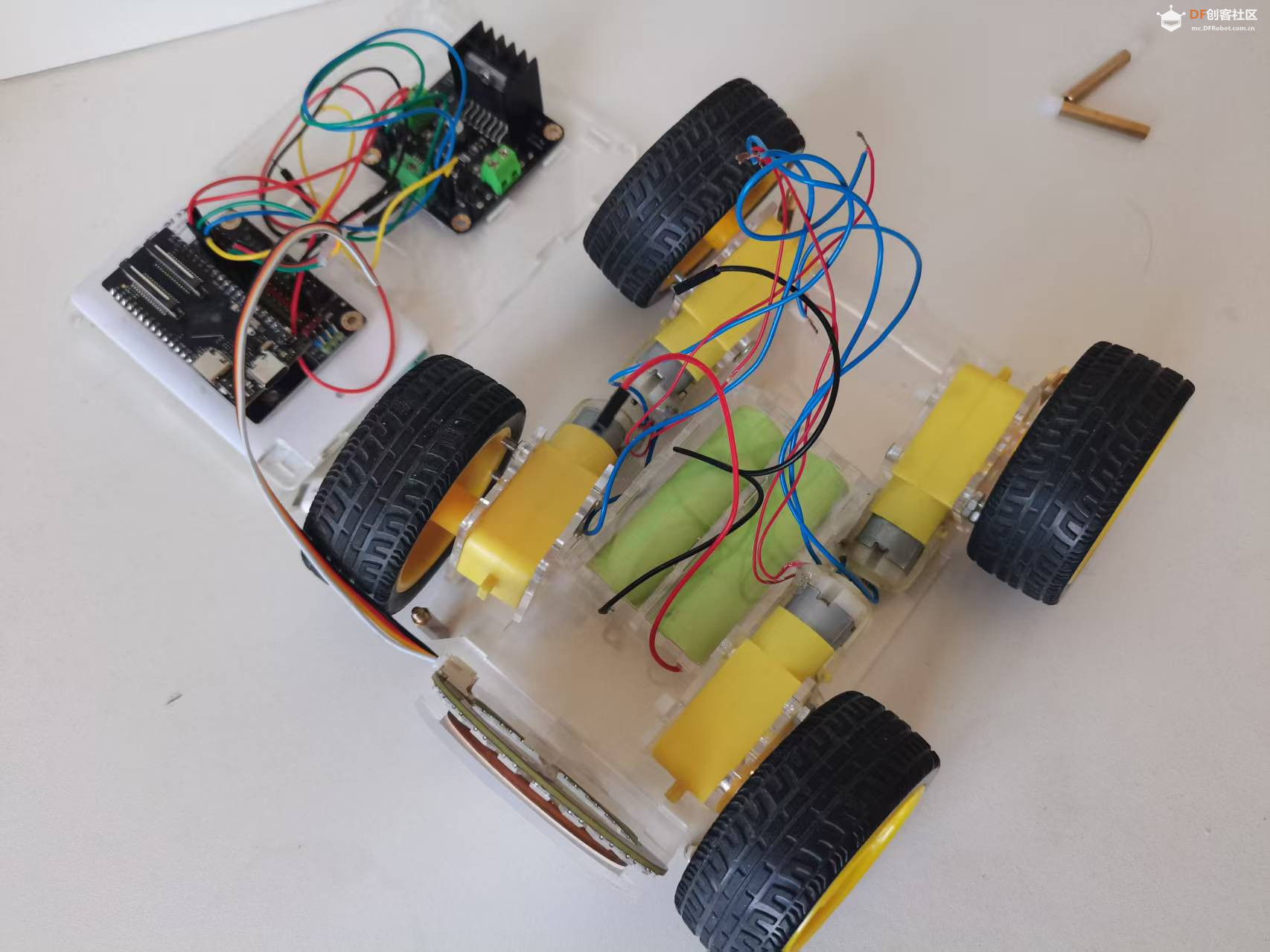 5.组装车身 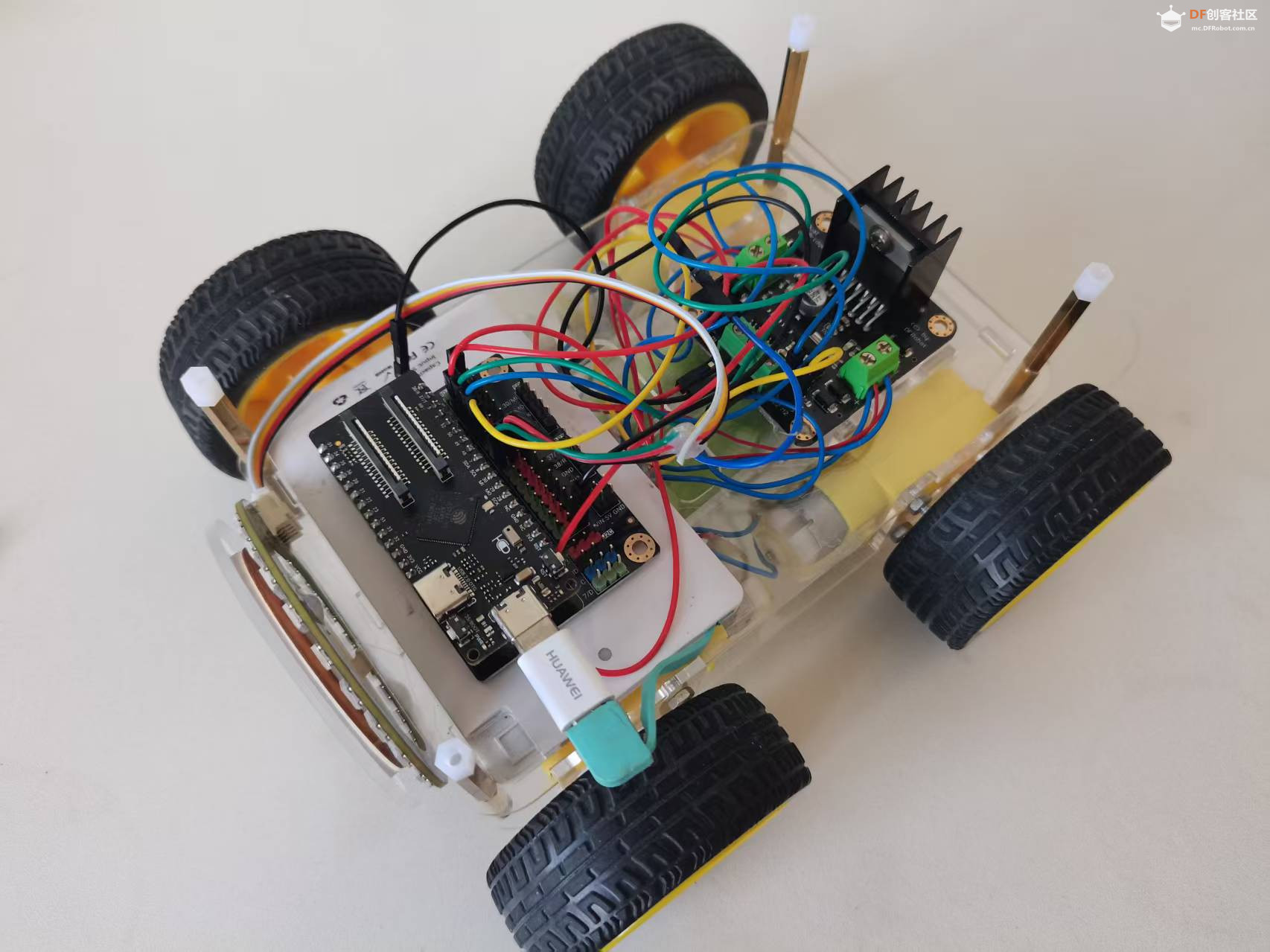 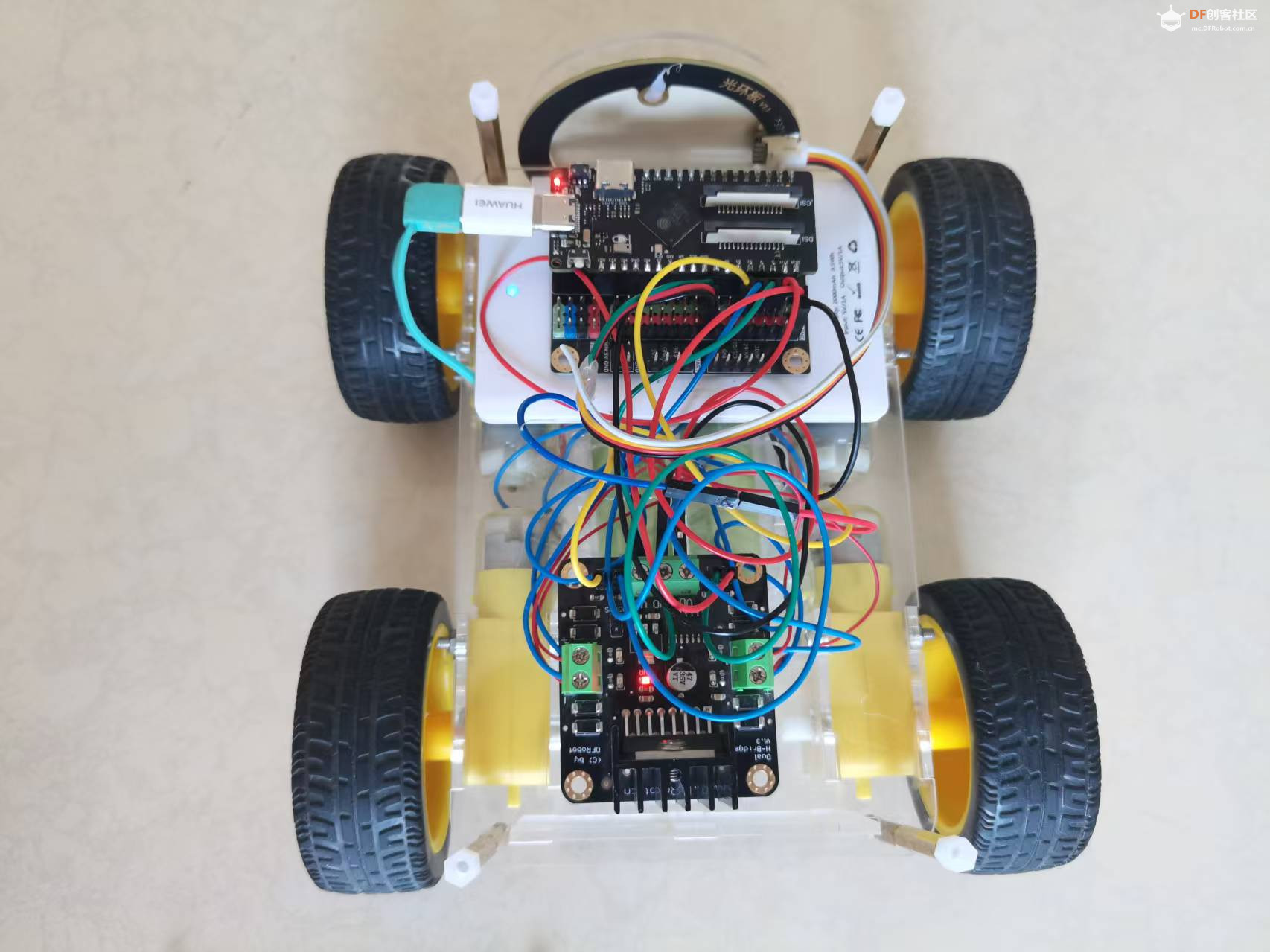 6.安装车顶  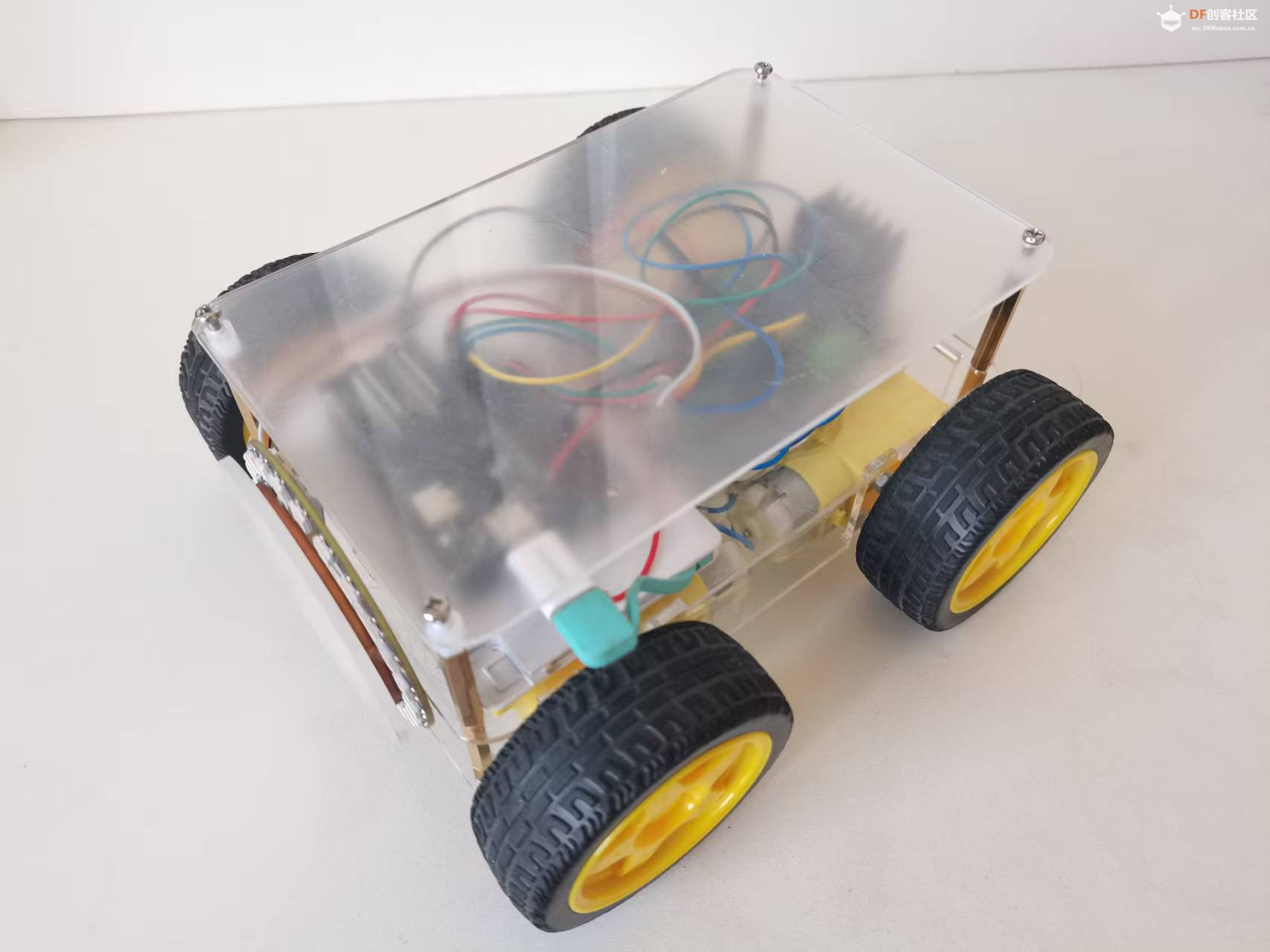 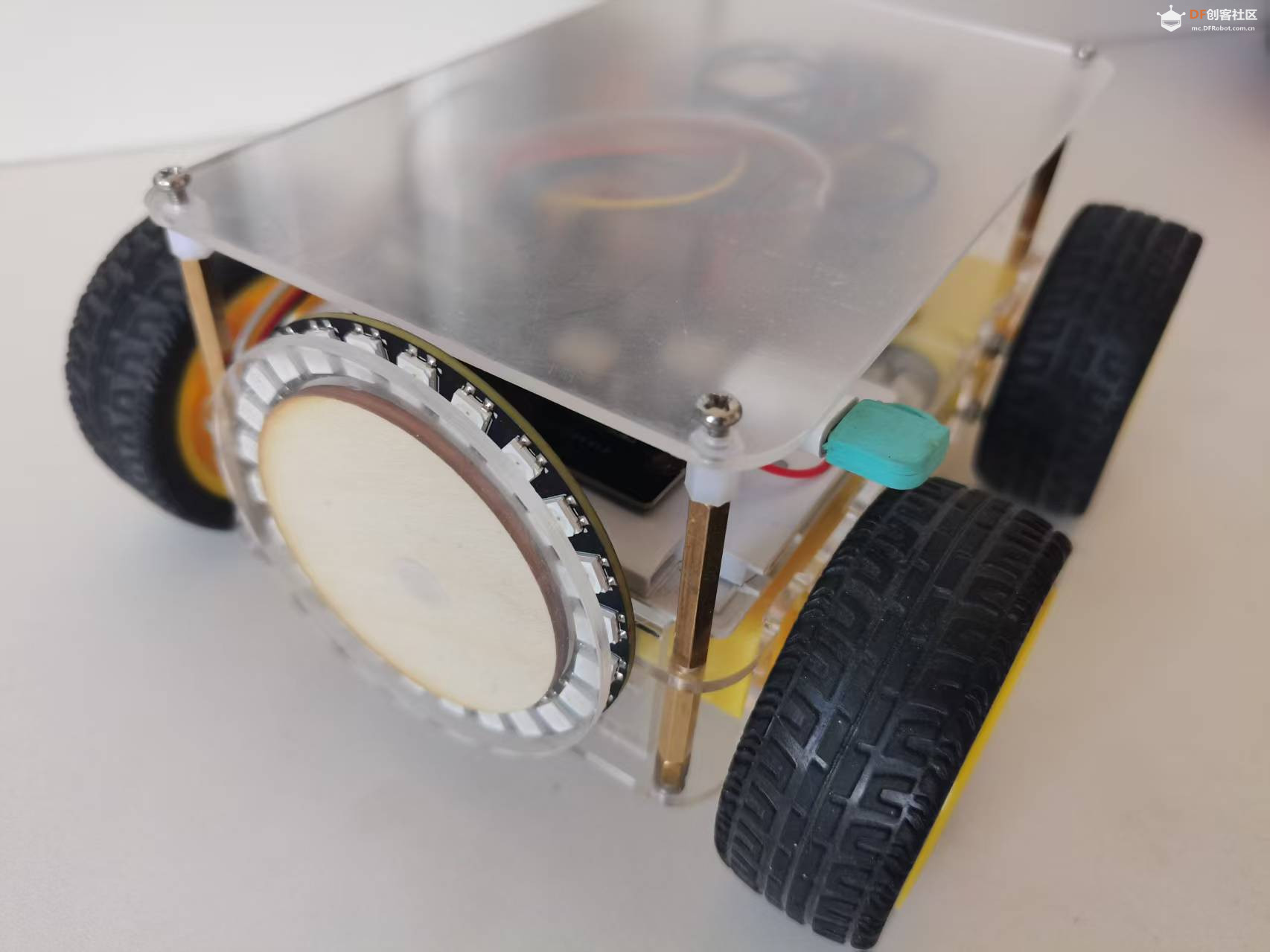 【软件配置:烧录 ESP-Claw 固件】 在线烧录,使用数据线连接开发板,启动在线烧录工具并连接串口(https://esp-claw.com/zh-cn/flash/),按下图选择芯片型号,然后烧录固件。 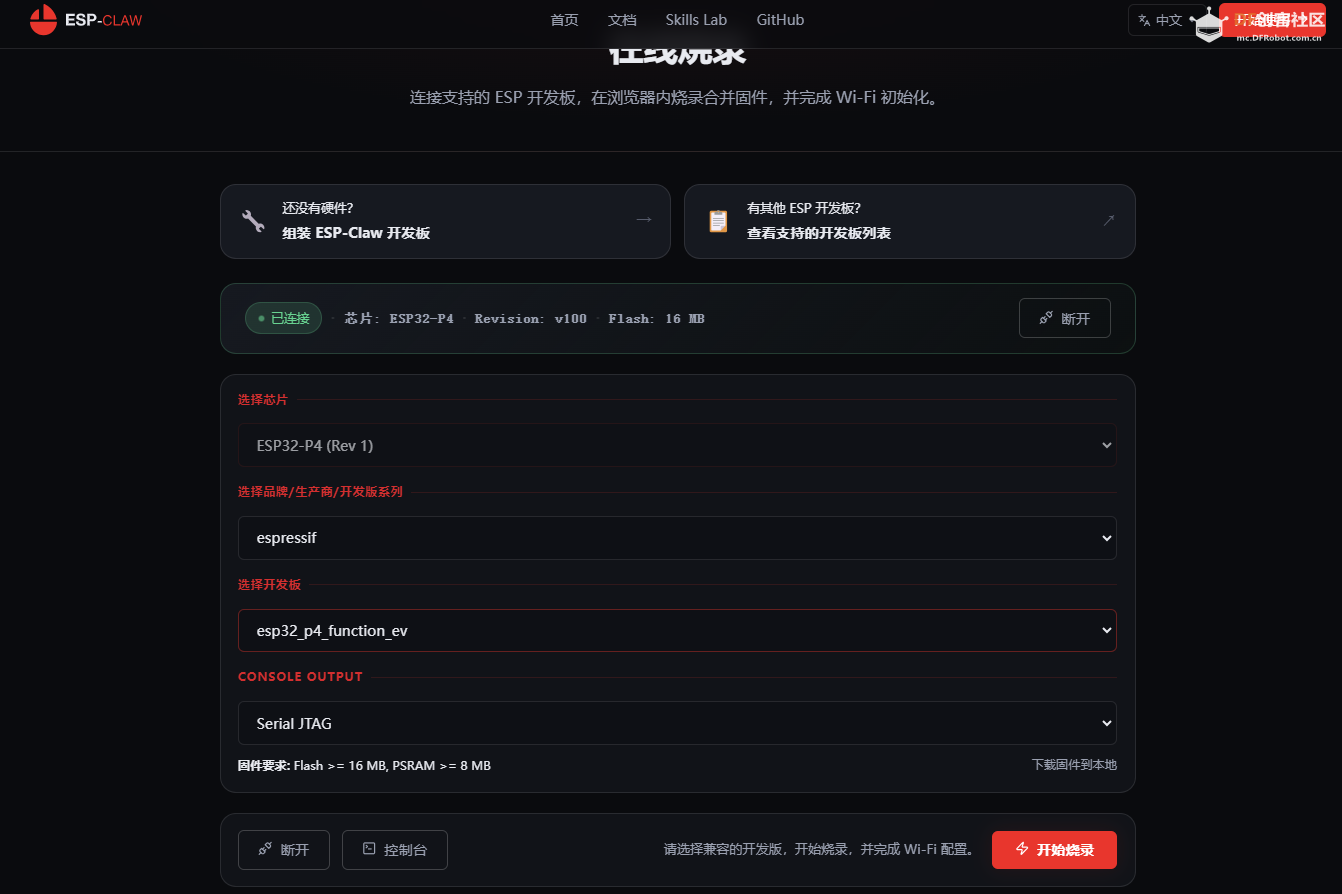 【Web 配置:连接 WiFi 与 LLM】 烧录完成后,ESP-Claw 会创建一个名为 ESP-Claw-XXXX 的 WiFi AP。 1. 连接配置热点
 2. 填写网络与 LLM 信息 在 Web 配置页面中,依次填写:
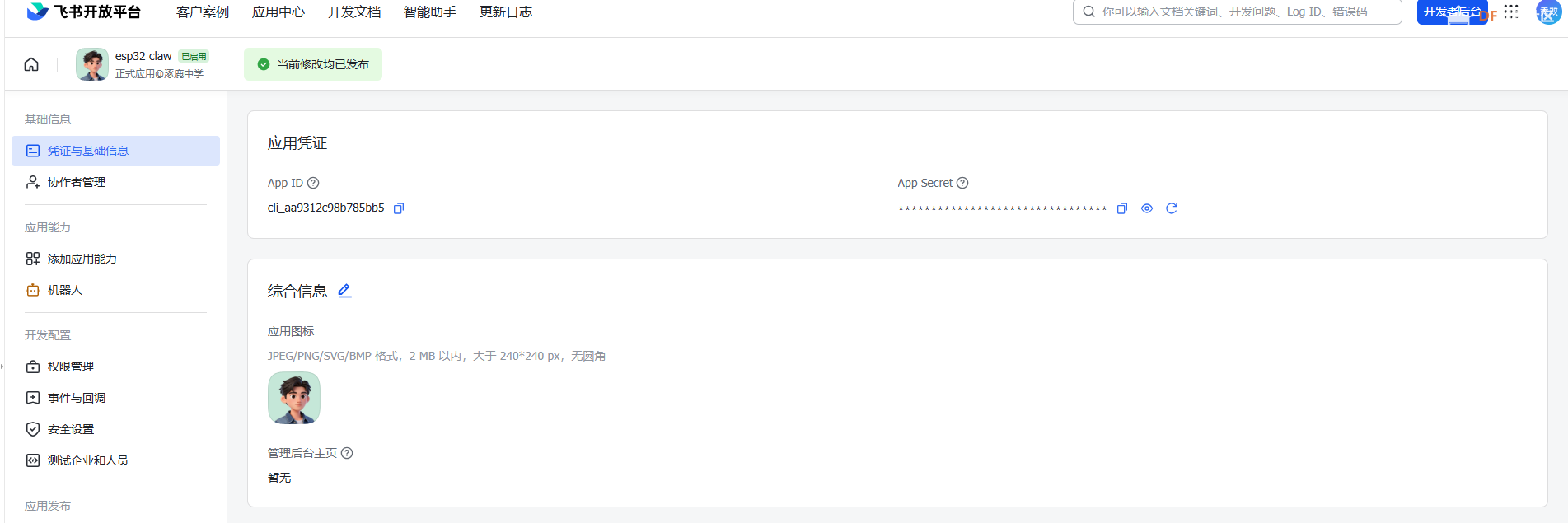
保存后,开发板会自动重启并连接 WiFi。串口日志会显示 IP 地址和连接状态。 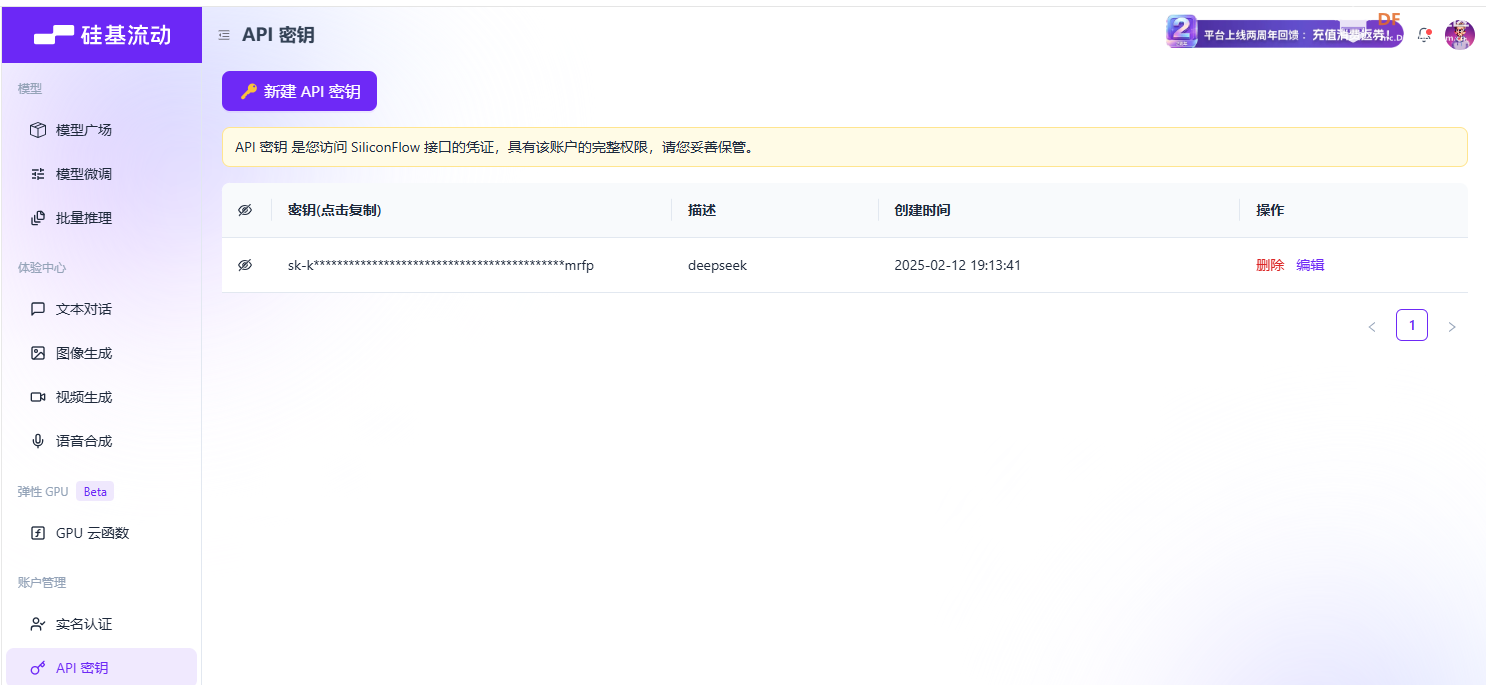 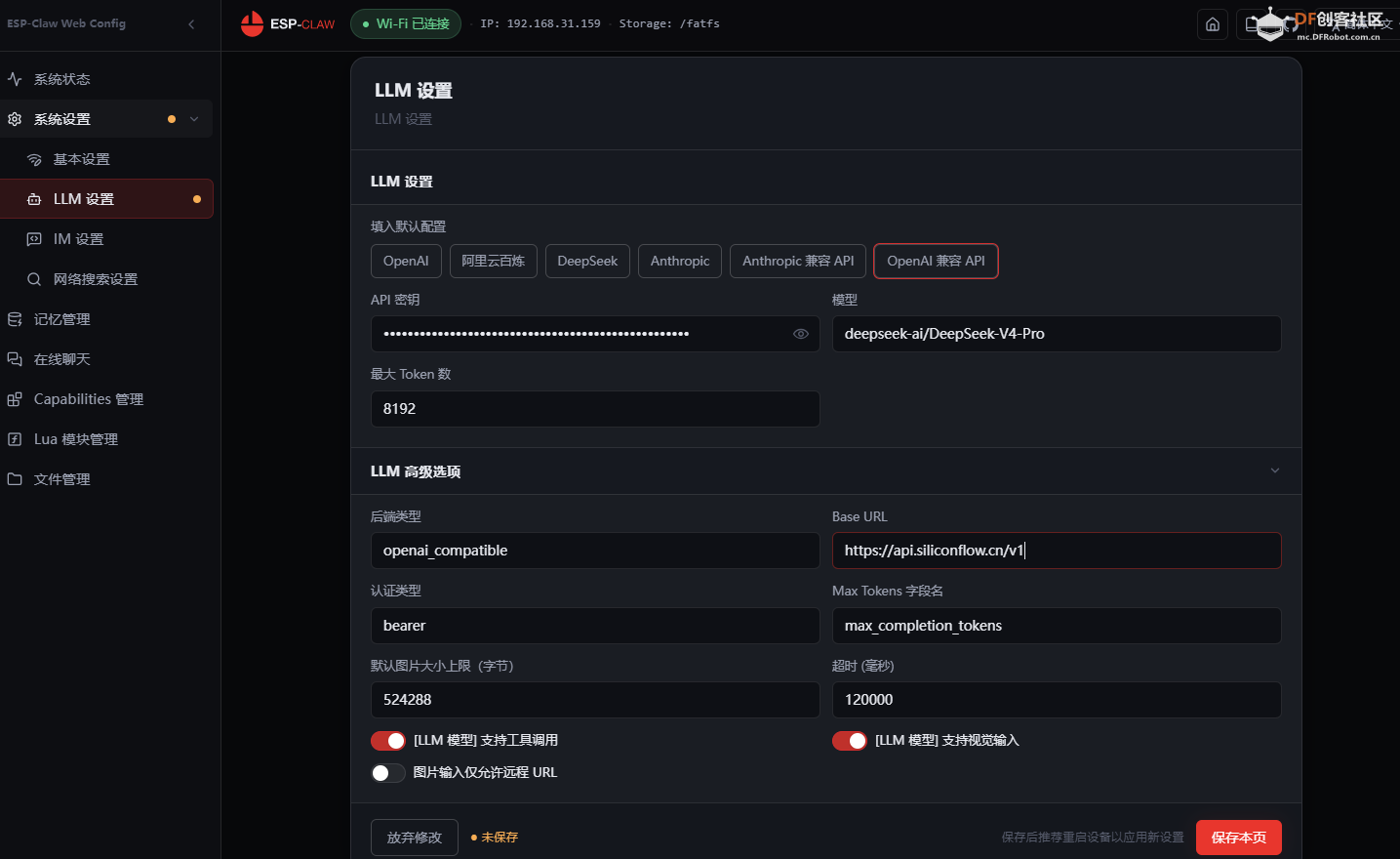 【飞书 ClawBot 配置:创建"esp32 claw"智能体】 1. 创建飞书应用
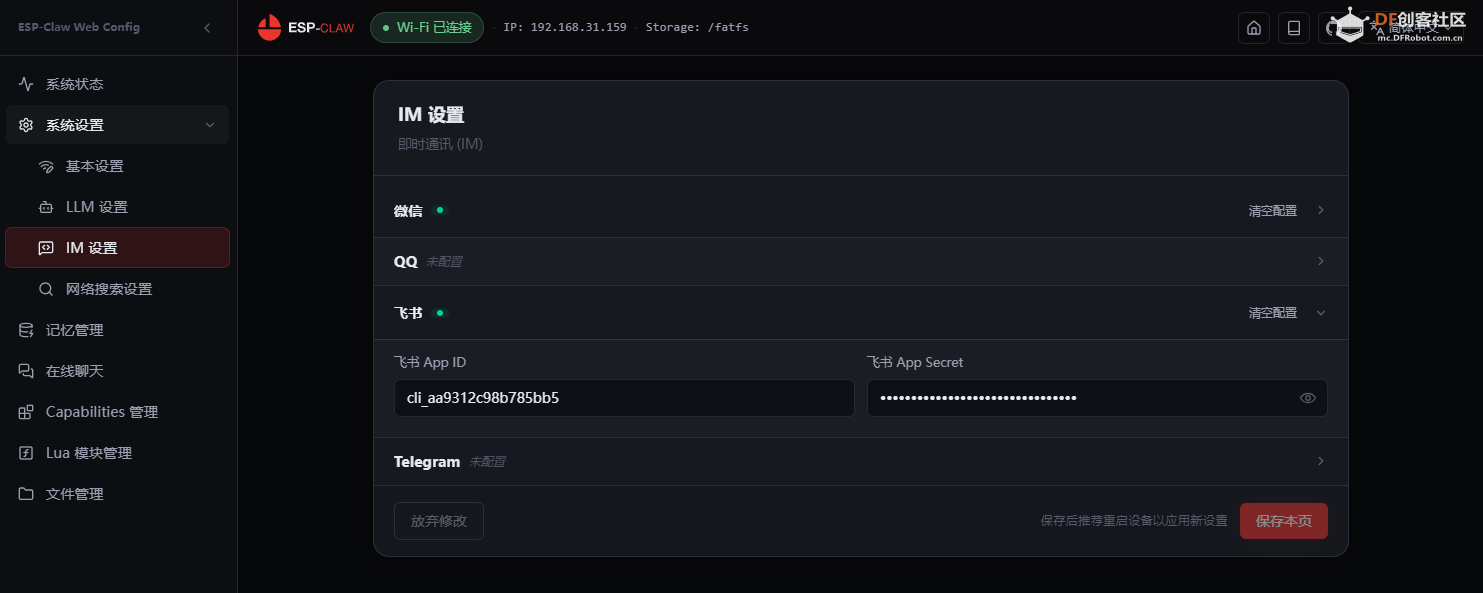
(2)App Secret(应用密钥) 2. 将飞书凭证填入 ESP-Claw回到 ESP-Claw 的 Web 配置页面(或串口命令行),在 IM 配置区域填写:
  【语音控制:用自然语言指挥小车】 打开手机飞书 App,进入与"esp32 claw"机器人的对话窗口。点击输入框右侧的麦克风图标,使用语音转文字输入。 1. 第一步:告知硬件配置 首先,你需要让 ESP-Claw 了解你的硬件引脚定义。发送以下消息: "我的小车使用 GPIO20 控制左轮使能 E1,GPIO21 控制左轮方向 M1;GPIO22 控制右轮使能 E2,GPIO23 控制右轮方向 M2。GPIO33 接了 24 颗 WS2812 灯珠。 L298N 的 E 端高电平使能,M 端高电平正转、低电平反。"ESP-Claw 会理解这段配置,并将其固化为本地 Lua 规则,后续无需重复说明。 2. 第二步:发送控制指令示例 1:流水灯效果 "让 GPIO33 的灯带执行彩虹流水灯效果,循环 3 次,然后保持蓝色常亮。"示例 2:走正方形路径 "小车执行以下动作:向前走 2 秒,向左转 2 秒,再向前走 2 秒,再向左转 2 秒,重复直到走完一个正方形,最后停下来。"示例 3:组合动作 "先开启流水灯,然后小车前进 2 秒,左转 2 秒,再前进 2 秒,左转 2 秒,再前进 2 秒,左转 2 秒,再前进 2 秒,左转 2 秒,最后灯带变成绿色并停止。"3. 背后的执行逻辑 当你发送指令后,ESP-Claw 的处理流程如下:
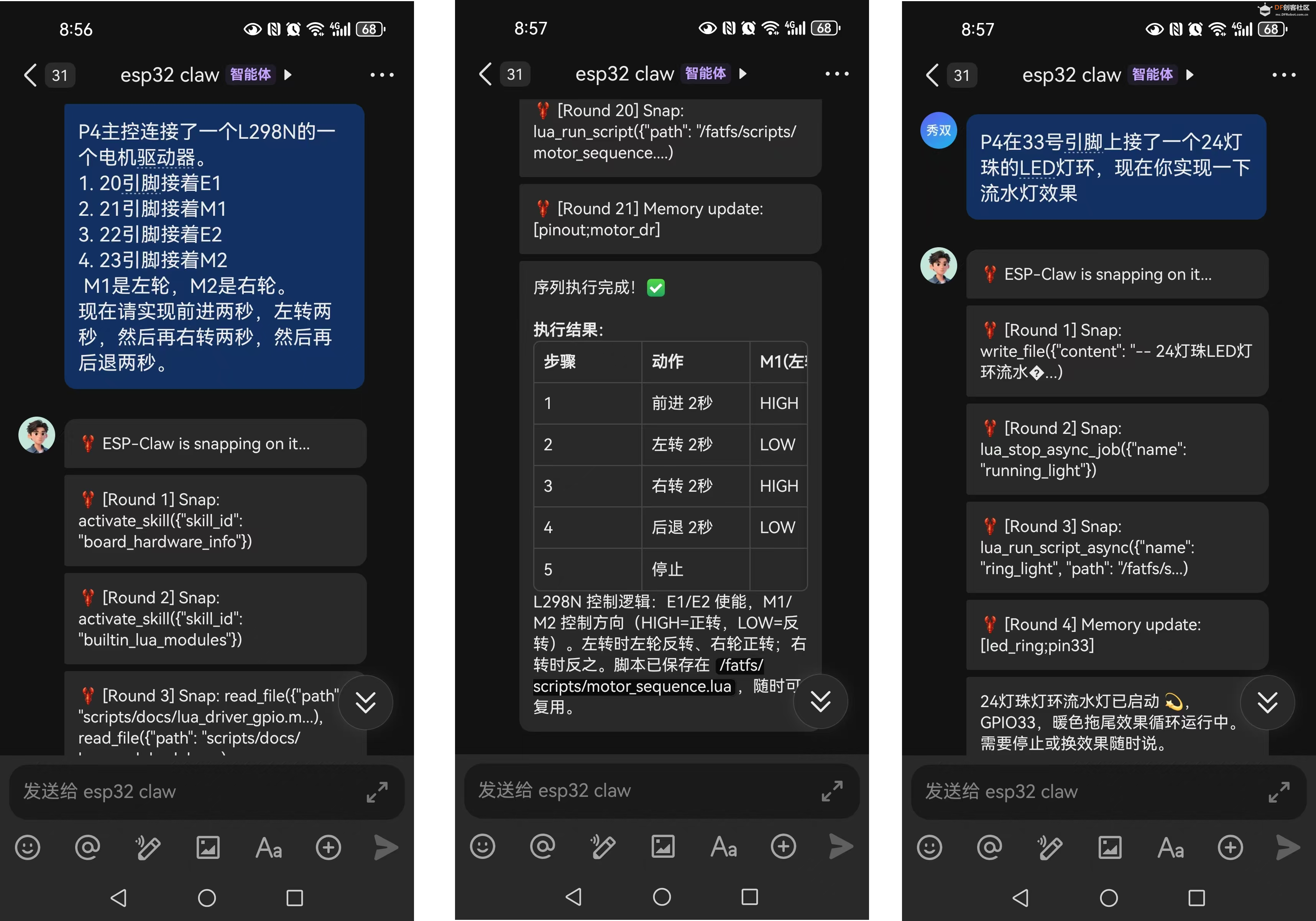 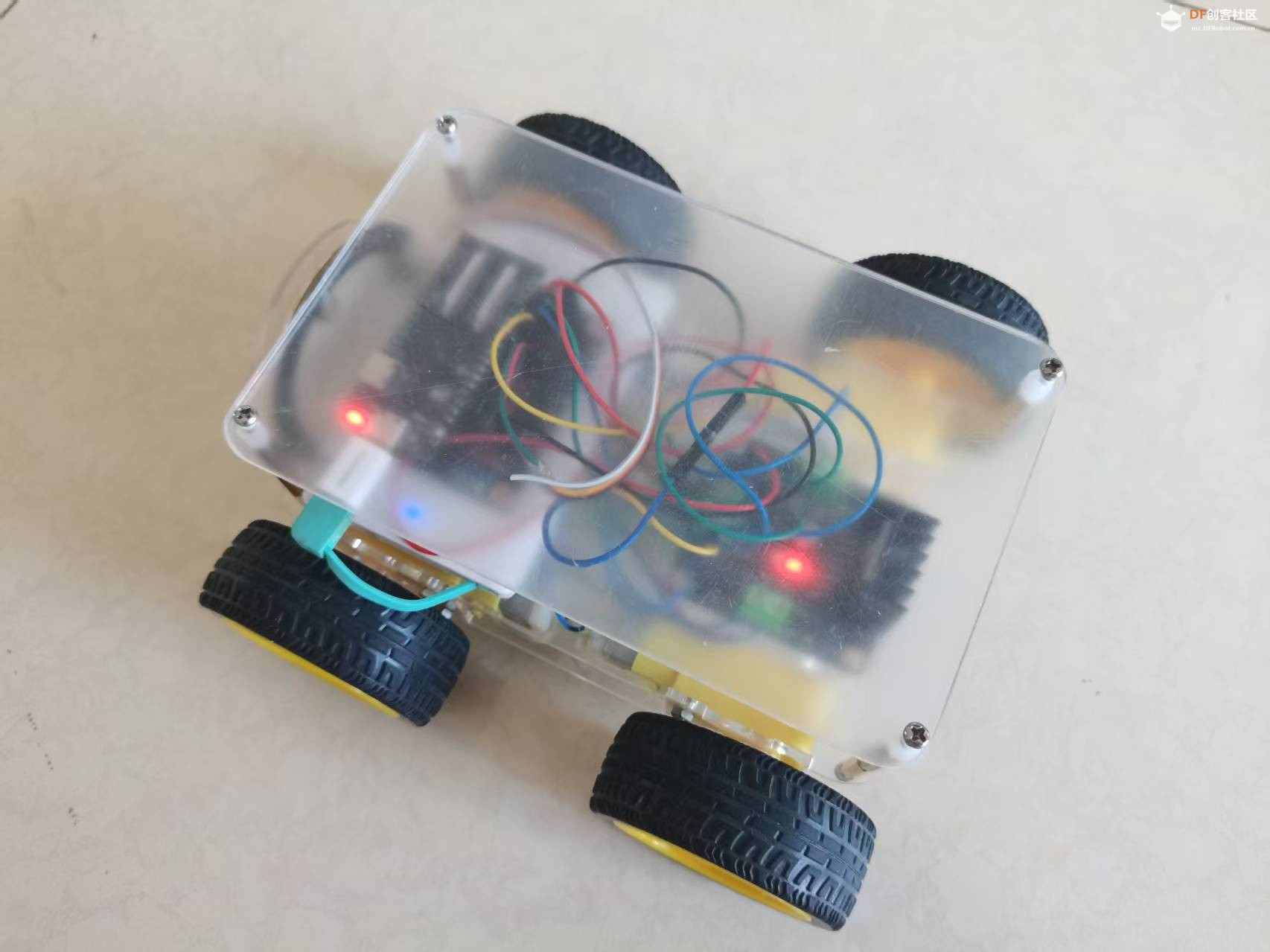 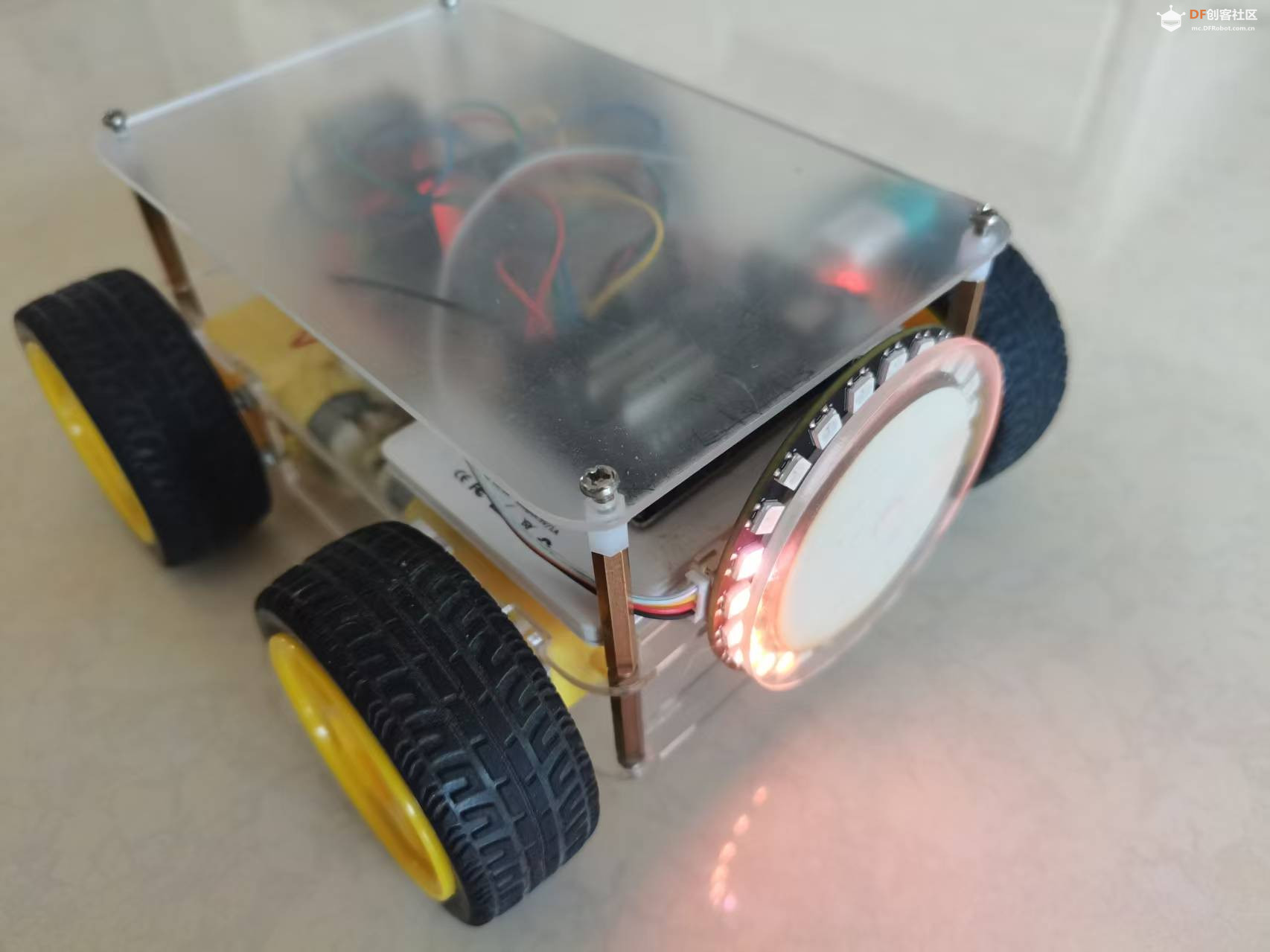 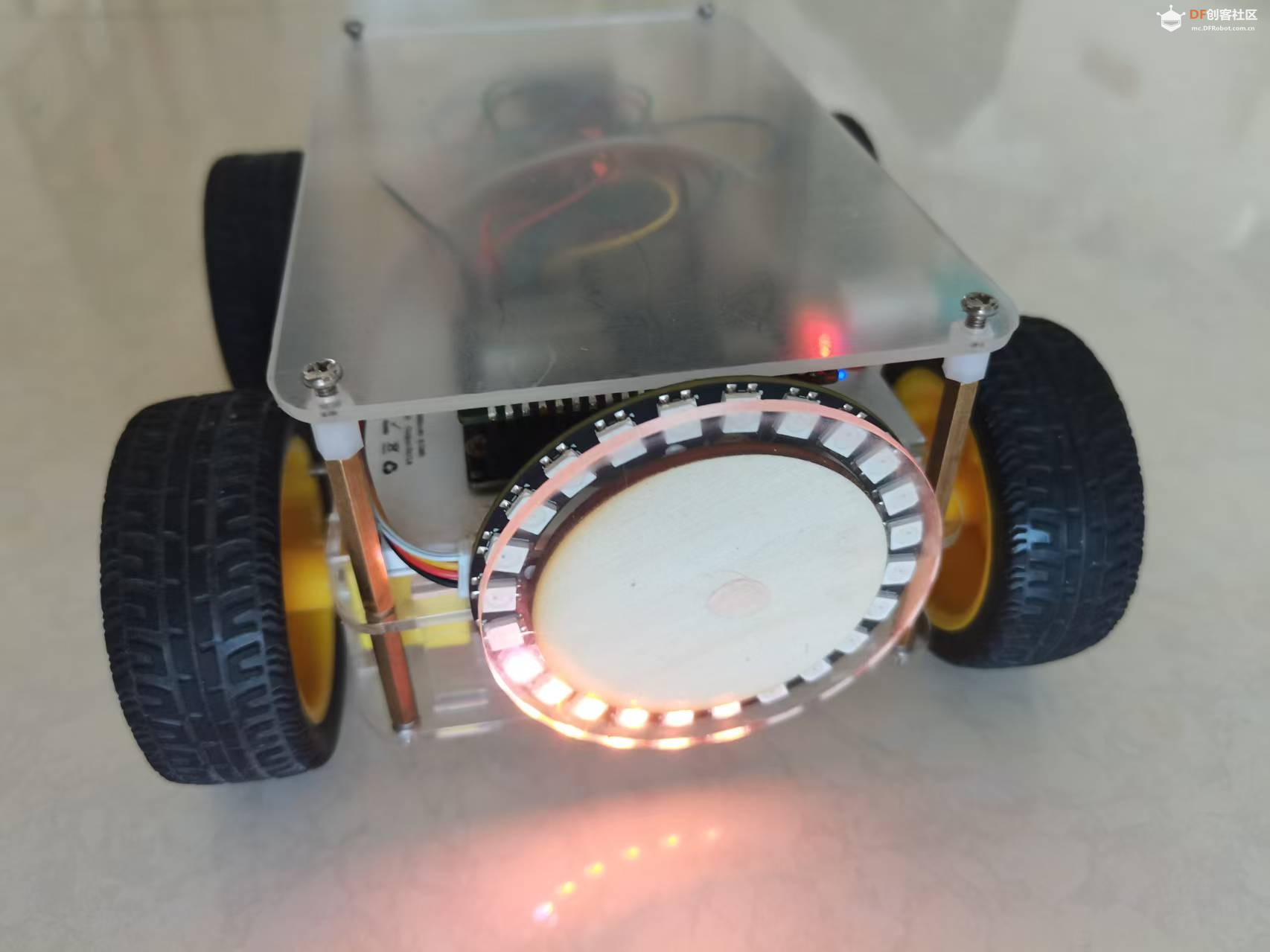 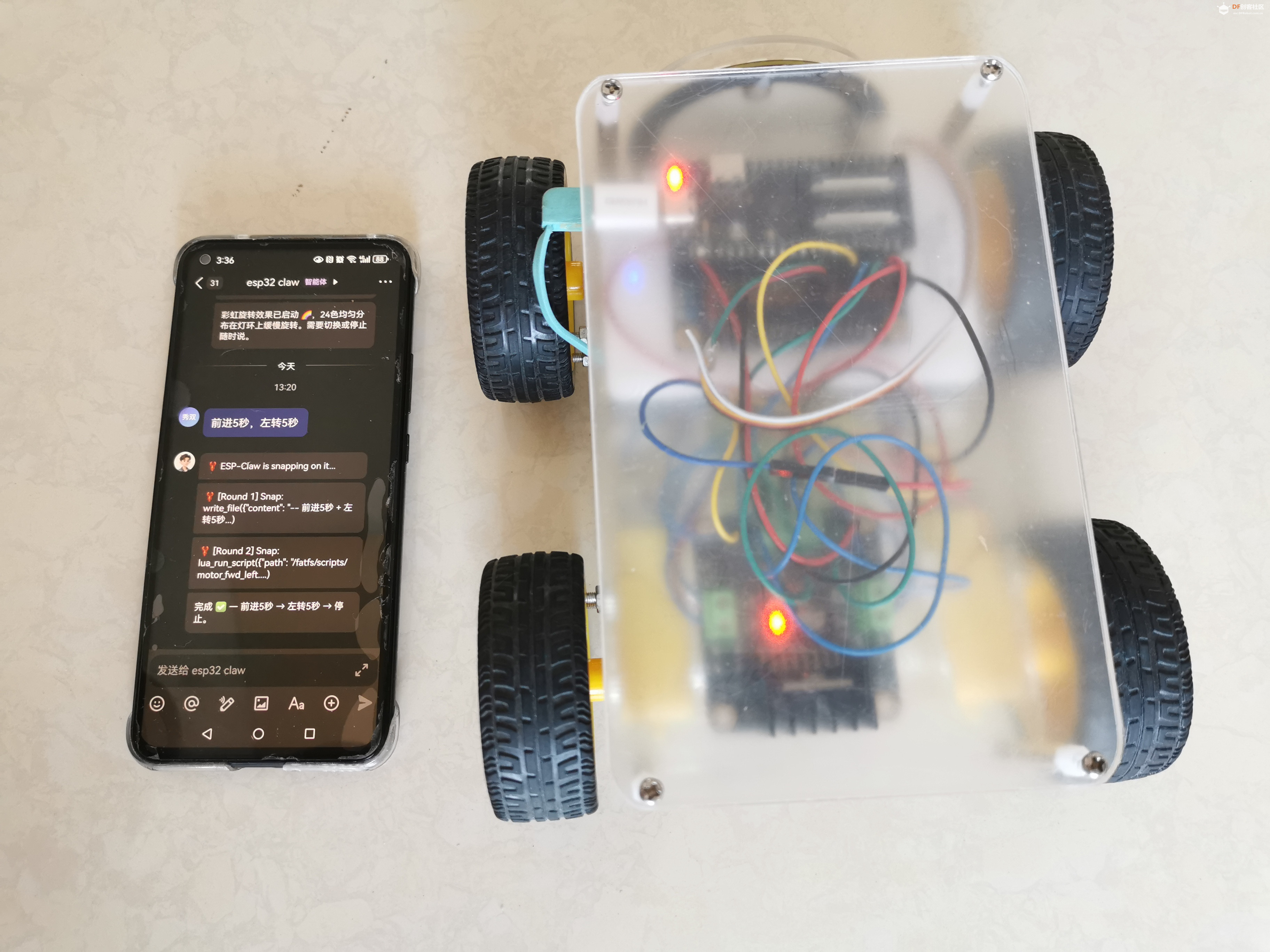 【项目效果展示】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






