|
5934| 27
|
[项目] 【花雕动手做】尝试使用不同舵机来控制机械臂旋转底盘 |
|
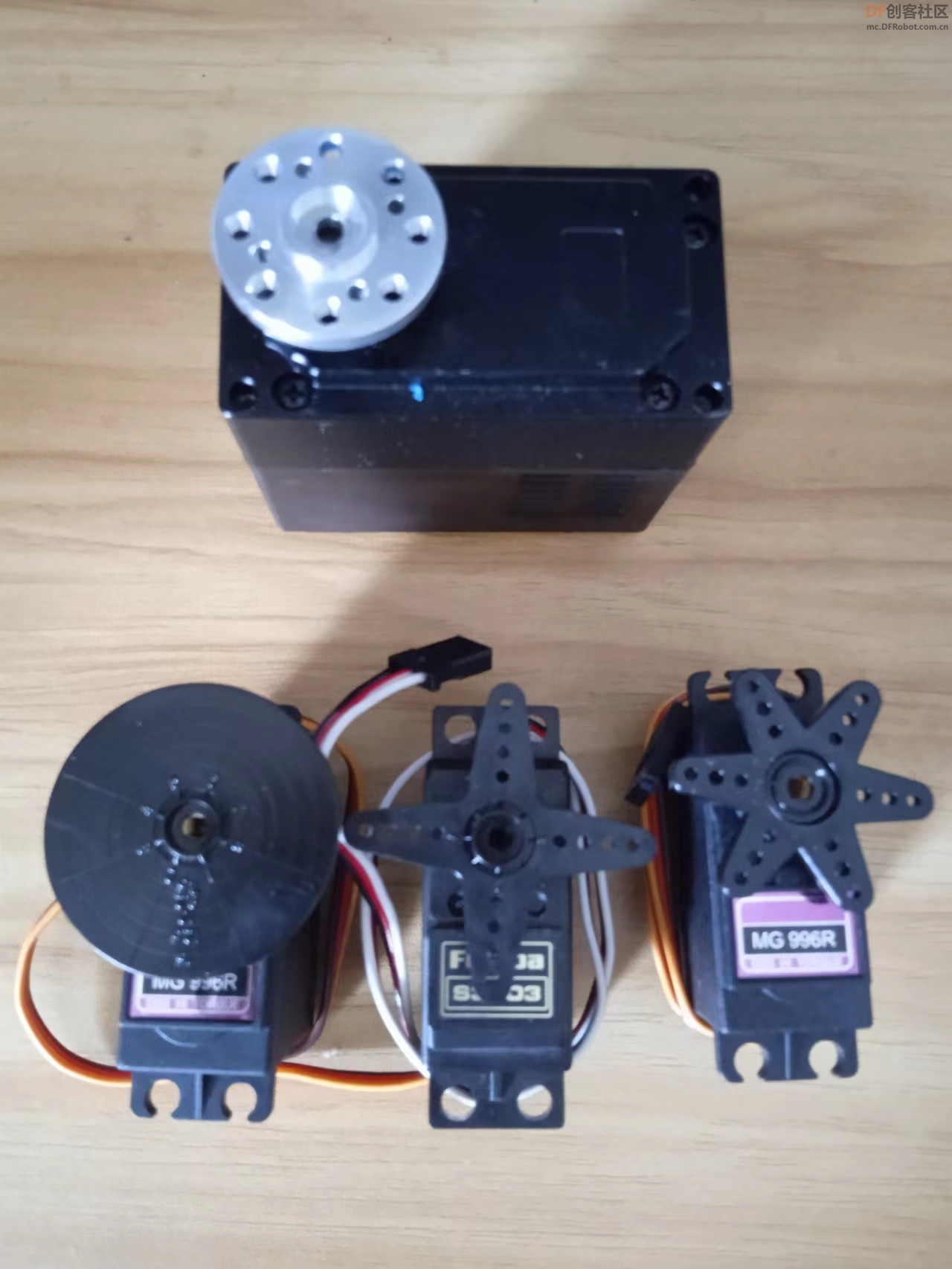
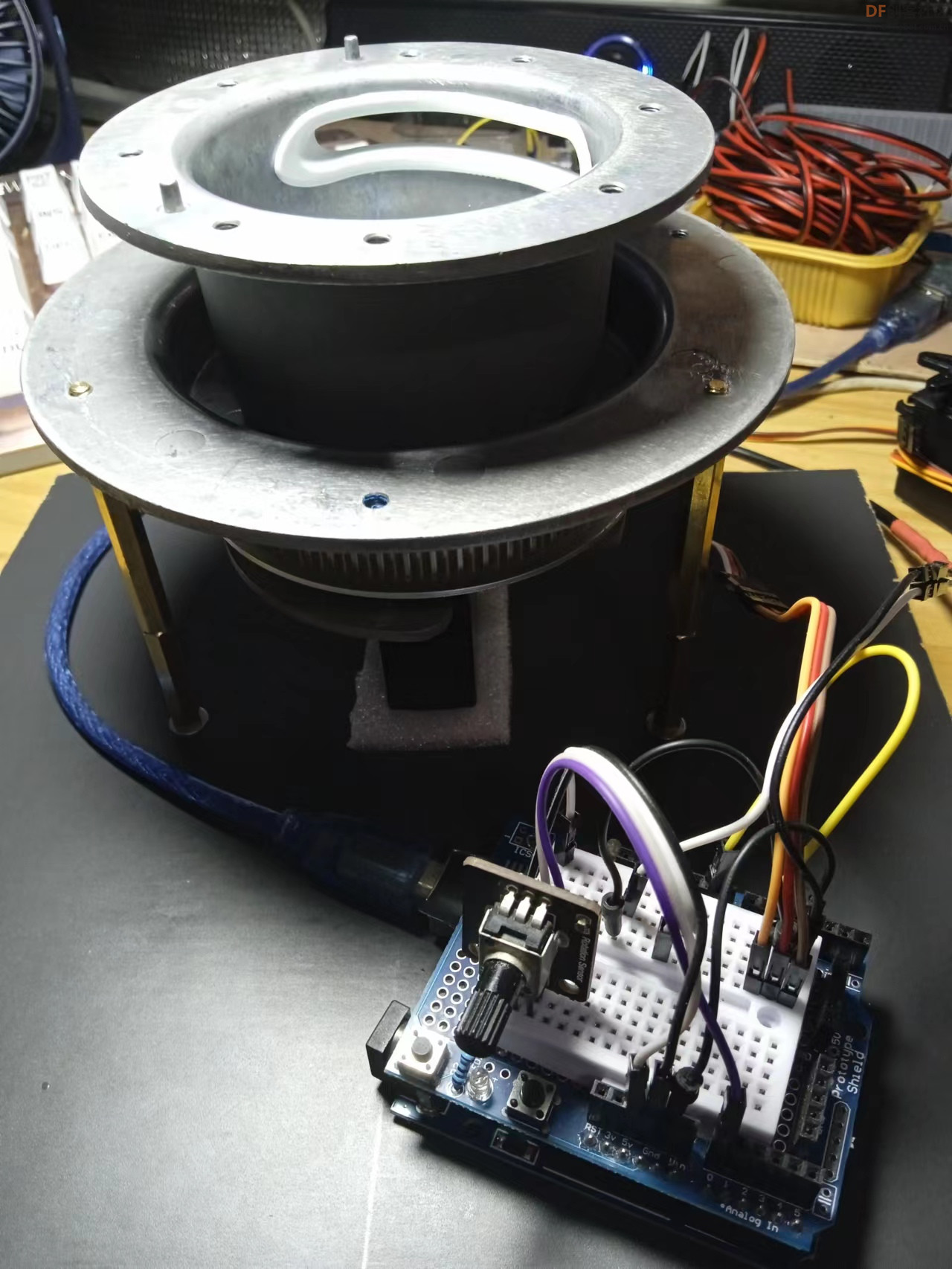
关键词: 中空旋转平台,金属云台,机械臂旋转底盘,机器人关节,中空金属转台 中空旋转平台通过电机(舵机)驱动,实现角度调整自动化。精加工蜗轮蜗杆或齿轮传动,角度调整无极限。精密轴系设计,保证精密高,承载大;步进电机与传动件通过进口高品质弹性联轴器连接,排除空间和加工形位误差。旋转台面外圈刻度直观;标准接口,方便信号传输;手动手轮配置,电控手动均可。可选装伺服电机或步进电机。 特点 1、中空结构 中空旋转平台的转盘为中空结构,伺服电机连接在侧边,方便冶具中的气管、电线安装。 2、高刚性 中空旋转平台的转盘由一套精密交叉滚子轴承支撑,轴承中的滚子呈90度交错排列,并且滚子直径略大于轴承内圈与外圈间的滚道尺寸,使得交叉滚子轴承的内外圈及滚子之间存在预紧力,由此轴承支撑的伺服旋转平台转盘能够承 受径向、轴向、倾覆等各种力矩,其刚性是传统轴承的5倍以上。 3、高旋转精度 SR系列伺服旋转平台在组装完成后,以平台的交叉滚子轴承为旋转中心,再次对转盘的外径,端面进行磨削(标准级为精车),保证转盘的同轴度,平行度等形位公差。 4、高重复定位精度 中空旋转平台采用单级螺旋齿轮减速方式来增大输出扭矩,齿轮精度等级达5级以下,加之灵活的调隙机构,通过改变两齿轮中心距的方式来控制侧隙,使得中空旋转平台的空回极小,重复定位精度在5弧秒以下。 5、马达任意配置 中空旋转平台通过定制法兰及输入轴孔的方式灵活变换接口尺寸大小,适合连接任意品牌的伺服电机、步进电机。 这里准备尝试使用不同舵机来控制它,找到了四种不同的舵机。   |
|
【花雕动手做】尝试使用不同舵机来控制中空旋转平台(机械臂底盘) 项目:使用10K电位器模块控制S3003舵机位置 |
|
【花雕动手做】尝试使用不同舵机来控制中空旋转平台(机械臂底盘) 项目:测试舵机步进转动 |
|
【花雕动手做】尝试使用不同舵机来控制中空旋转平台(机械臂底盘) 项目:最简单的伺服电机程序 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






