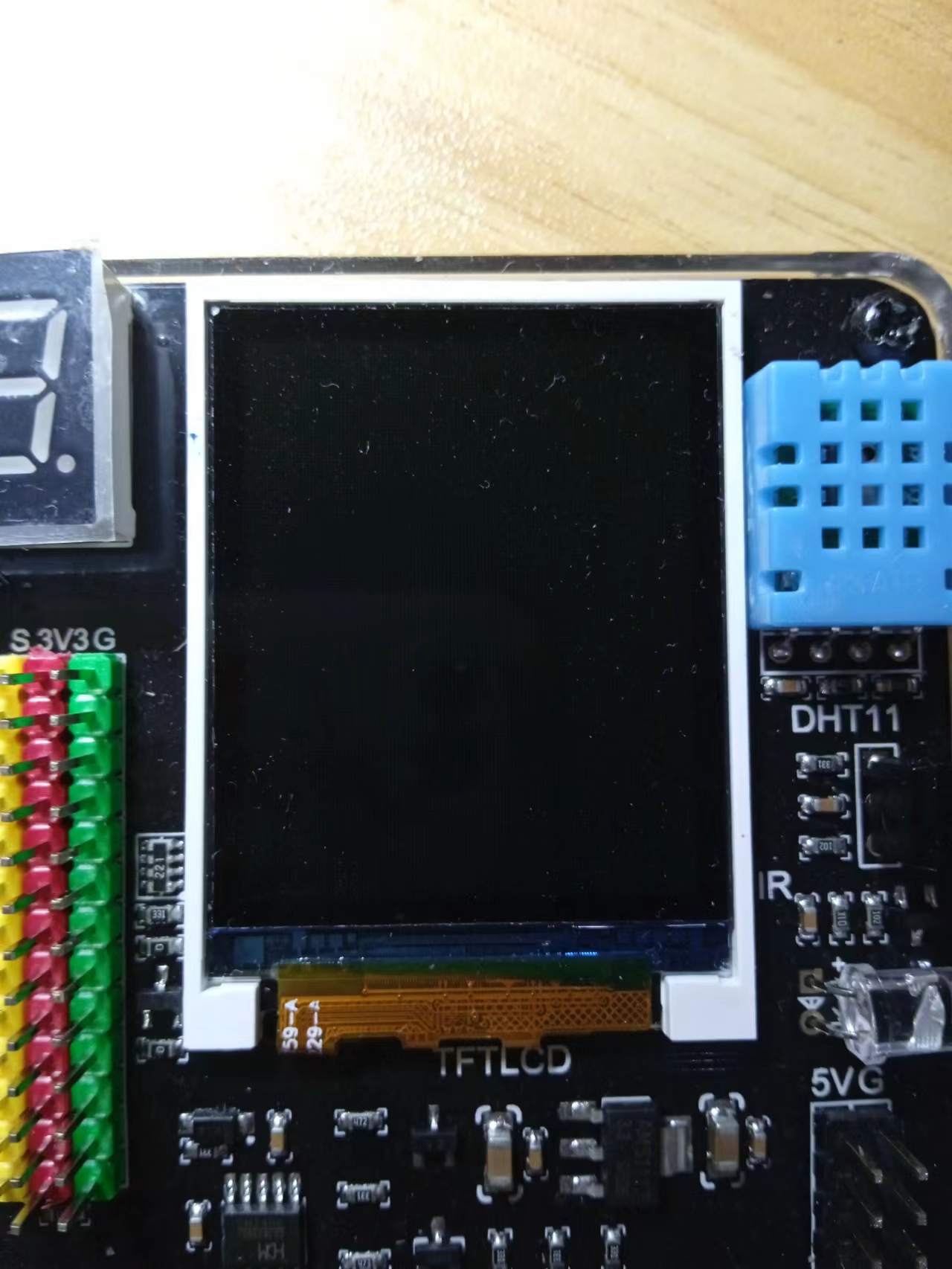
本例实验的SPI彩色液晶1.77寸显示屏(ST7735驱动)
TFT177-SPI,型号为SX177QQVGA,像素128X160TFT,驱动芯片为ST7735S,这是一款支持SPI接口的1.77寸TFT彩屏,可以显示文字、图形、图片等内容,提高用户互动体验度。
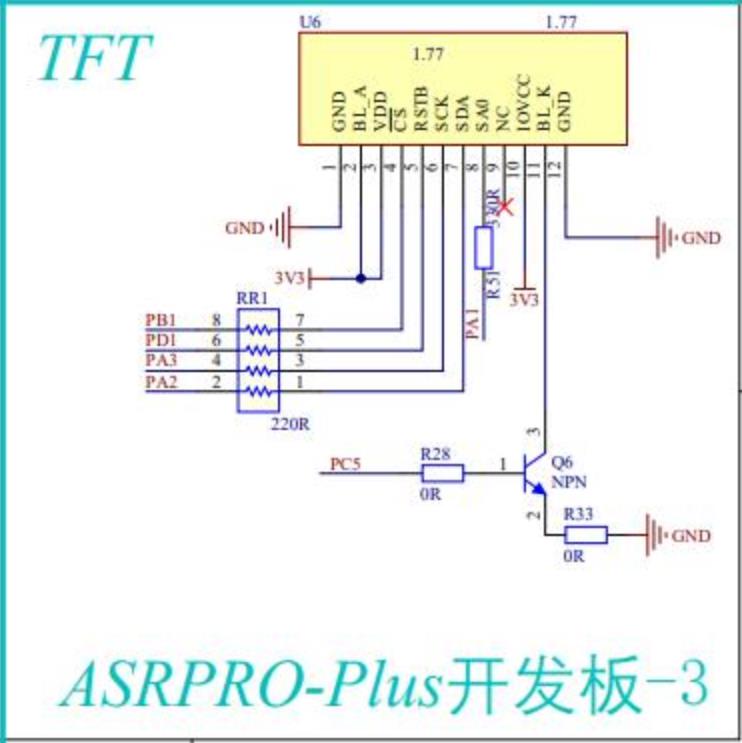
电原理图
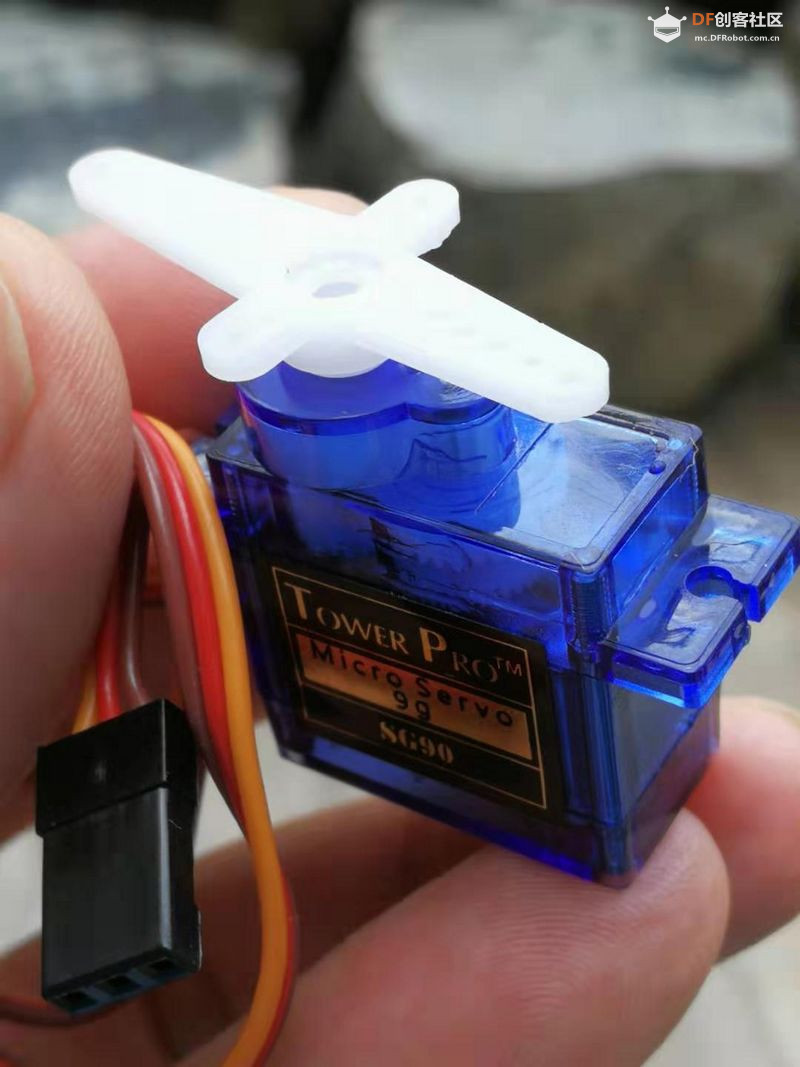
本例实验使用180度SG90舵机模块
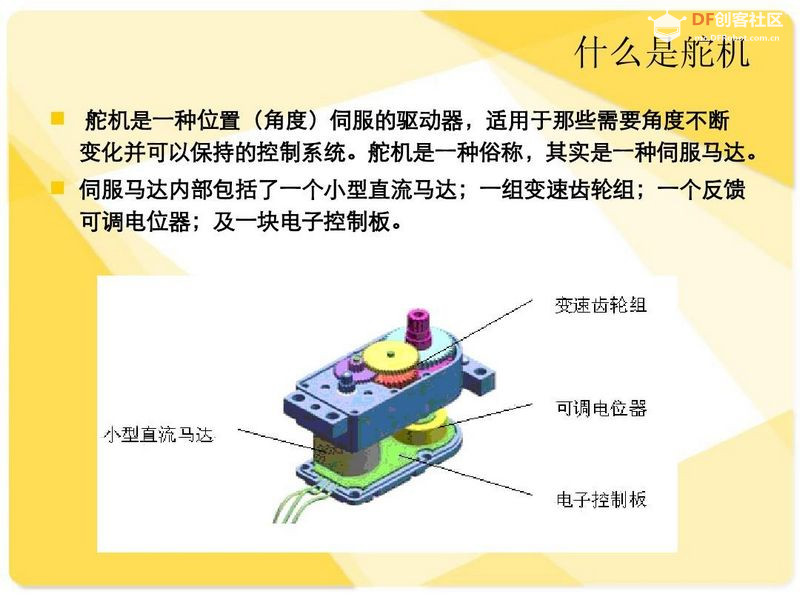
舵机
是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经由电路板上的IC 判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。适用于那些需要角度不断变化并可以保持的控制系统。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。一般舵机旋转的角度范围是0 度到180 度。

SG90舵机
9克小舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。常见于航模,飞机模型,遥控机器人及机械部件当中。在使用中,舵机的配件通常包含一个能把舵机固定到基座上的支架以及可以套在驱动轴上的舵盘,通过舵盘上的孔可以连接其它物体构成传动模型。小舵机自带的3线接口可以通过RJ25适配器与主板相连。
SG90舵机技术规格
工作电压:4.8V到6V DC
工作电流:80到100mA
待机电流:5mA
极限角度: 210°±5%
扭力: 1.3到1.7kg/cm
工作温度:-10℃到60℃
湿度范围:60%±10%
转速: 0.09到0.10 sec/60°(4.8V)
信号周期:20 ms
信号高电平时间范围:1000到2000 us/周期
尺寸: 32.3 x 12.3 x 30.6 mm (长x宽x高)
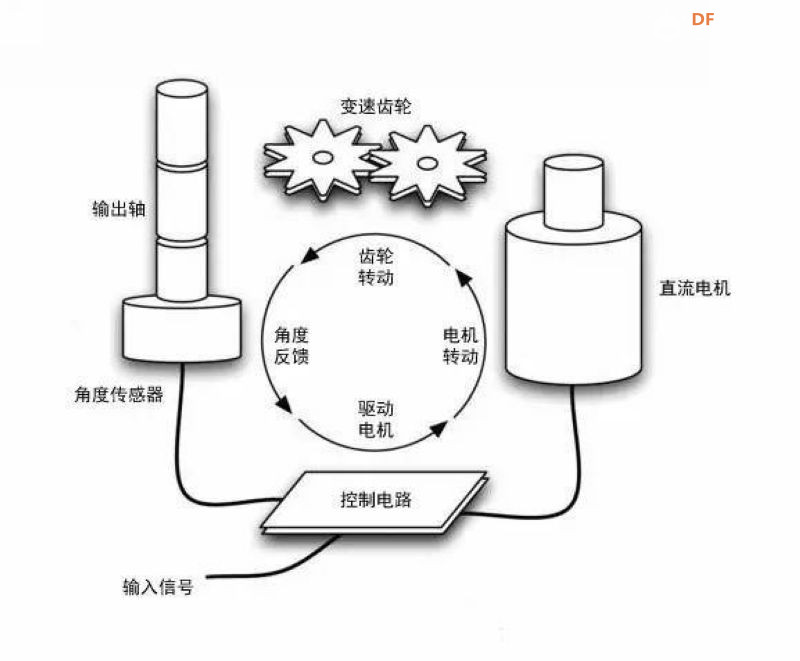
舵机工作原理
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。这样的直流电机控制方式叫闭环控制,所以舵机更准确的说是伺服马达,英文 servo.舵机组成: 舵盘、 减速齿轮、 位置反馈电位计、直流电机、 控制电路板等。控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘 转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
舵机的闭环检测机制
关于舵机的精准位置控制,存在以下如下图的闭环控制机制。即:位置检测器(角度传感器)是它的输入传感器,舵机转动的位置变化,位置检测器的电阻值就会跟着变化。通过控制电路读取该电阻值的大小,就能根据阻值适当调整电机的速度和方向,使电机向指定角度旋转。从而实现了舵机的精确转动的控制。
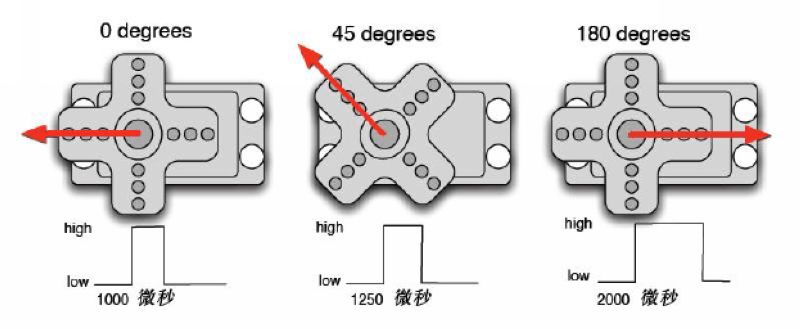
舵机的控制信号
为周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,转动范围不能超过180度,适用于那些需要角度不断变化并可以保持的驱动当中。比方说机器人的关节、飞机的舵面等。
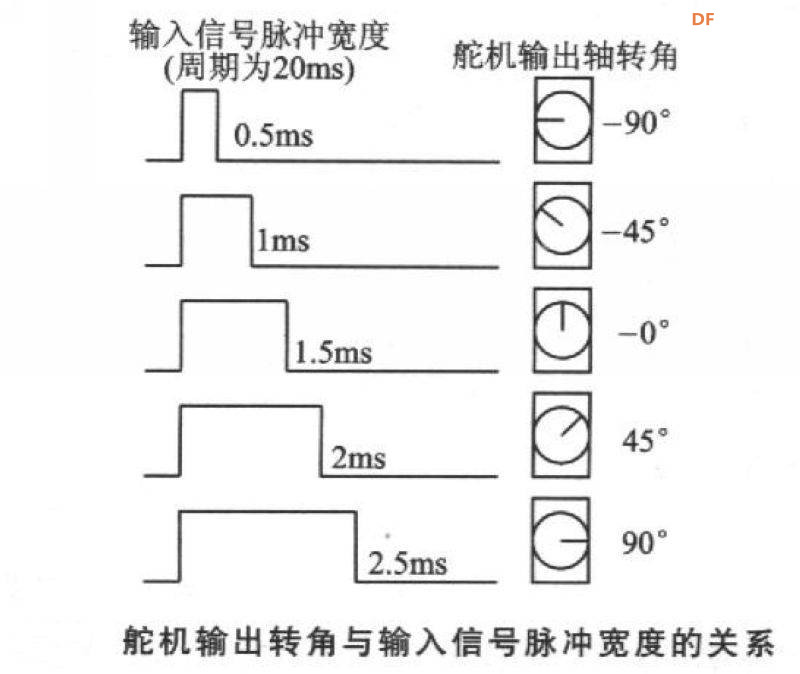
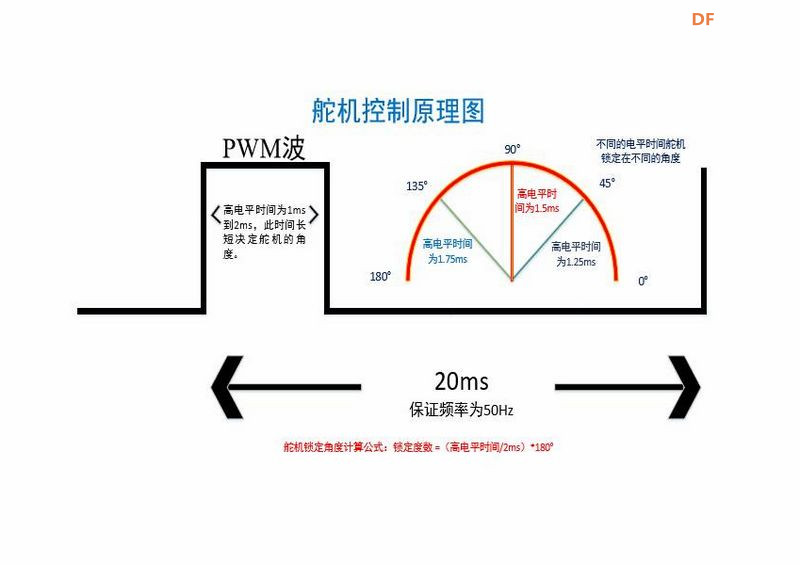
PWM信号和舵机转动角度的关系
说到舵机的控制信号,一般是脉宽调制(PWM)信号,如下图,直观反映了PWM信号和舵机转动角度的关系,你也可以简单的理解为,通过给舵机通电的时间控制,结合角度传感器的反馈信号检测和控制,实现了舵机的精确角度控制。舵机的控制信号周期为20MS的脉宽调制信号(PWM),其中脉宽从0.5ms-2.5ms,相应的舵盘位置从0-180度,呈线型变化。也就是说,给舵机提供一定的脉宽,他的输出轴就会保持一定的对应角度,无论外接转矩怎么改变,知道给他提供另外一个脉冲信号,他才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期为20MS,宽度为1.5MS的脉冲信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。舵机是一种位置伺服驱动器,转动范围不能超过180度,适用于那些需要不断变化并可以保持的驱动器中,比喻说机器人的关节、飞机的多面等。
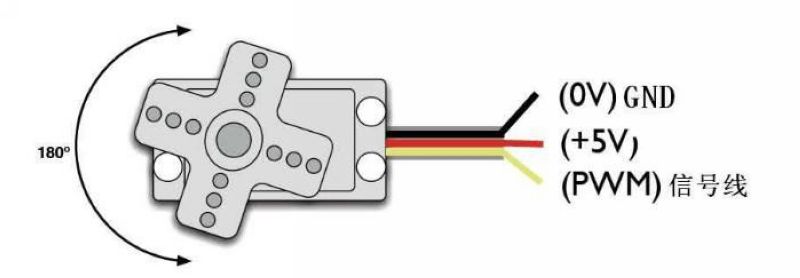
舵机的引脚定义
舵机接线方法(三线接线法)
(1)黑线(地线)
红线(电源线)两个标准:4.8V和6V蓝线/黄线(信号线)
(2)棕线(地线)
红线(电源线)两个标准:4.8V和黄线(信号线)
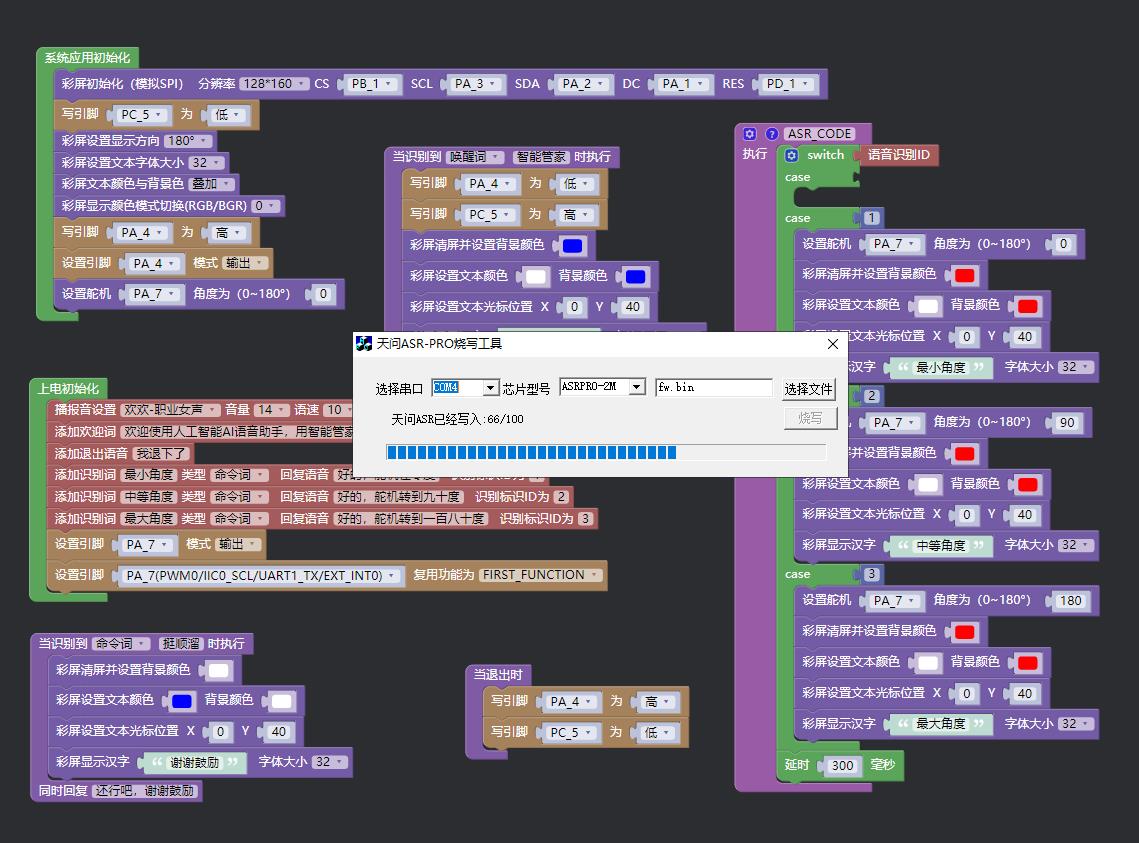
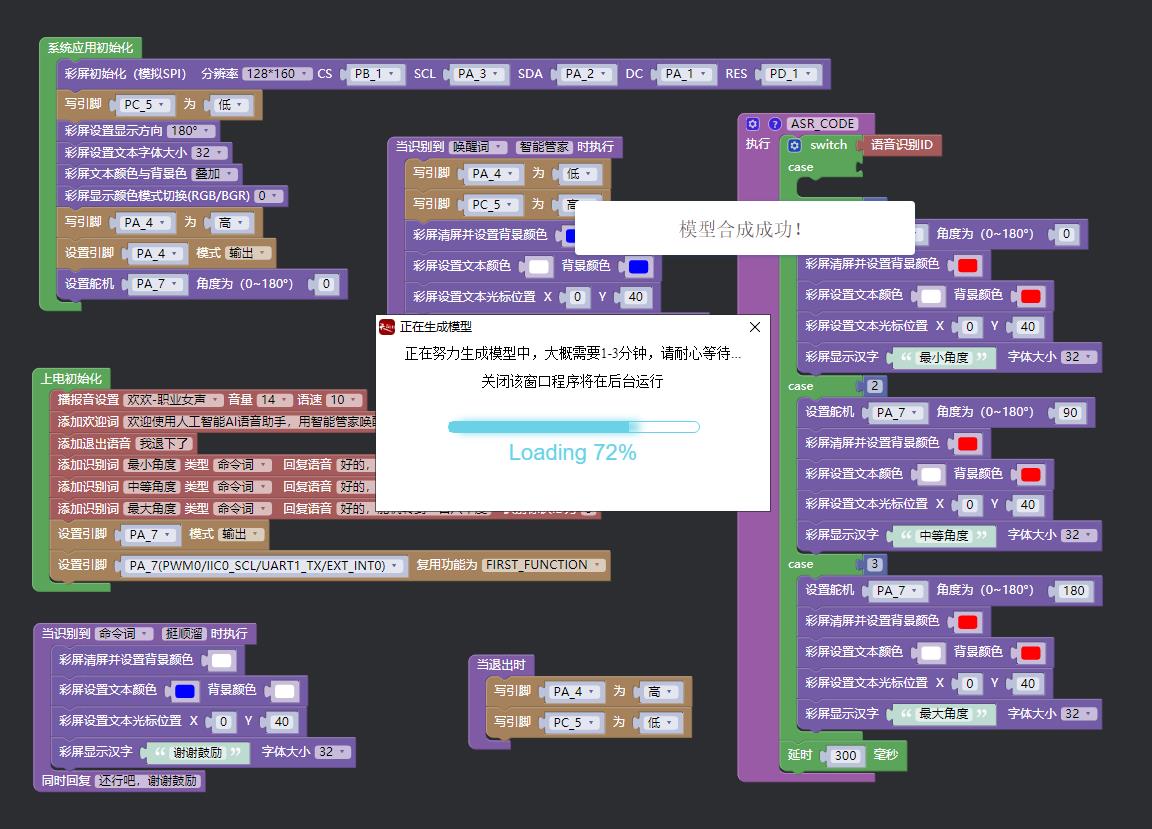
【花雕动手做】实验四十五:SPI彩色液晶1.77寸显示屏和SG90舵机模块
实验开源代码
- #define ASC2_12
- #define ST7735_CS_PIN 9
- #define ST7735_CS_GPIO_PIN gpio_pin_1
- #define ST7735_DC_PIN 1
- #define ST7735_DC_GPIO_PIN gpio_pin_1
- #define ST7735_RST_PIN 25
- #define ST7735_RST_GPIO_PIN gpio_pin_1
- #define ST7735_SCK_PIN 3
- #define ST7735_SCK_GPIO_PIN gpio_pin_3
- #define ST7735_MOSI_PIN 2
- #define ST7735_MOSI_GPIO_PIN gpio_pin_2
- #define ASC2_32
- #define ST7735S_RGB_GBR_ORDER 0
-
- #include "asr.h"
- extern "C"{ void * __dso_handle = 0 ;}
- #include "setup.h"
- #include "myLib/asr_st7735.h"
- #include "myLib/asr_event.h"
- #include "myLib/asr_servo.h"
-
- uint32_t snid;
- Servo servo_7;
- void ASR_CODE();
- void hardware_init();
-
- SPITFT spi_tft(128, 160);
- /*描述该功能...
- */
- void ASR_CODE(){
- switch (snid) {
- case NULL:
- break;
- case 1:
- digital_write((21),1);
- servo_7.write(0);
- spi_tft.clear((0xF800));
- spi_tft.set_text_color((0xFFFF),(0xF800));
- spi_tft.set_cursor(0,50);
- spi_tft.draw_hanzi_32("最小角度");
- break;
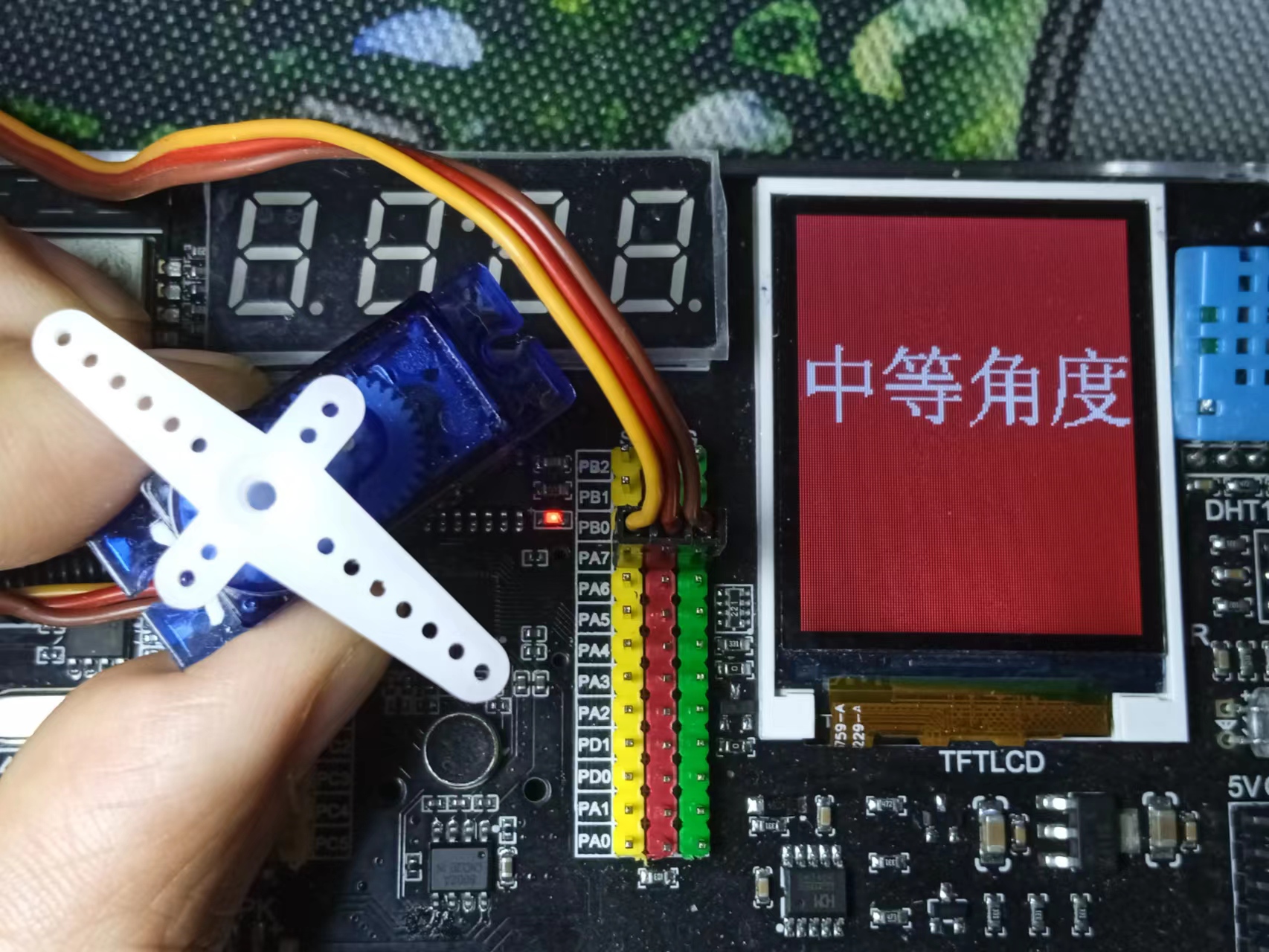
- case 2:
- digital_write((21),1);
- servo_7.write(90);
- spi_tft.clear((0xF800));
- spi_tft.set_text_color((0xFFFF),(0xF800));
- spi_tft.set_cursor(0,50);
- spi_tft.draw_hanzi_32("中等角度");
- break;
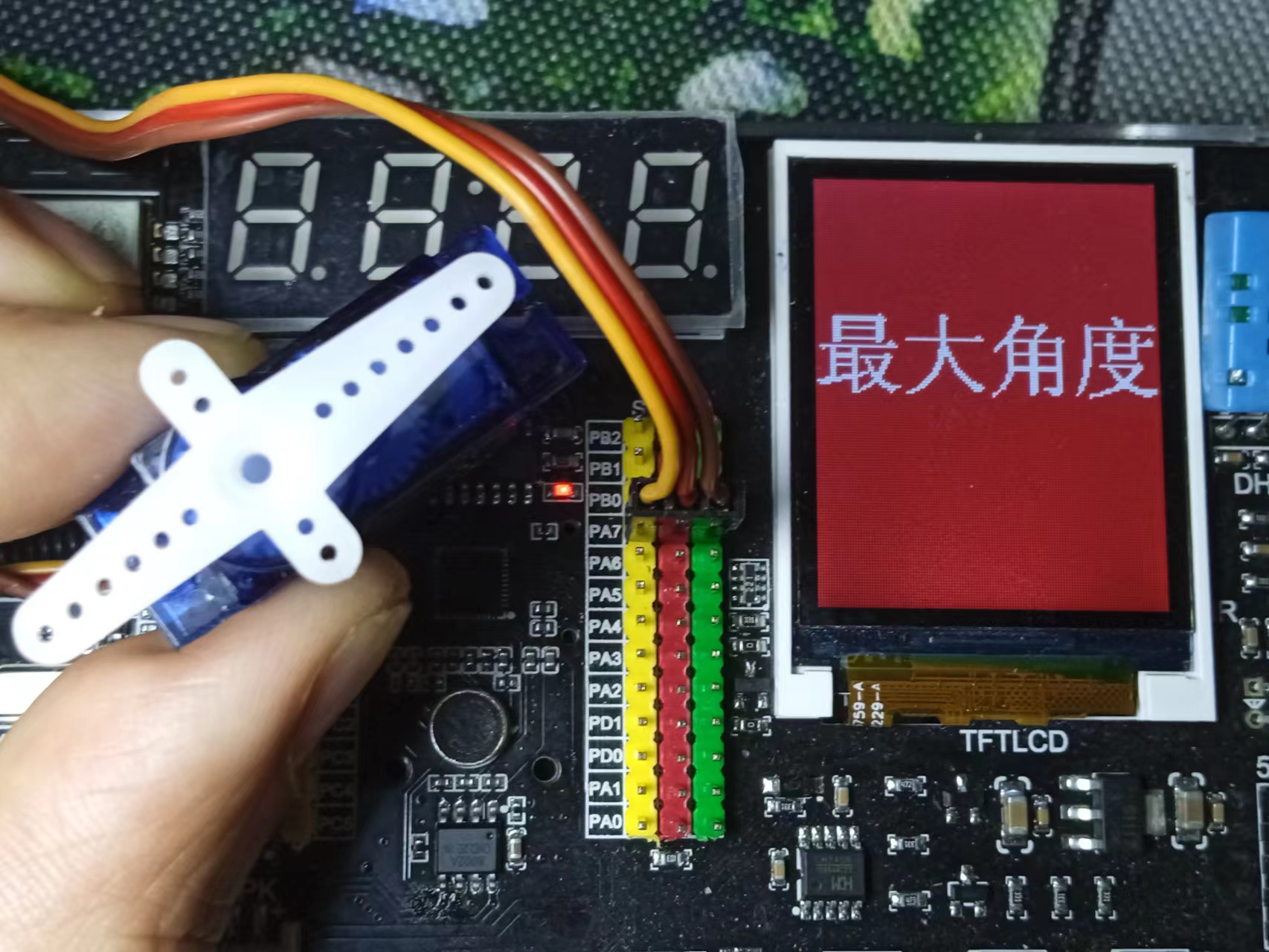
- case 3:
- digital_write((21),1);
- servo_7.write(180);
- spi_tft.clear((0xF800));
- spi_tft.set_text_color((0xFFFF),(0xF800));
- spi_tft.set_cursor(0,50);
- spi_tft.draw_hanzi_32("最大角度");
- break;
- }
- delay(300);
- //{ID:500,keyword:"唤醒词",ASR:"智能管家",ASRTO:"我在,请控制舵机"}
- if(snid == 500){
- digitalWrite(4,0);
- digital_write((21),1);
- spi_tft.clear((0x001F));
- spi_tft.set_text_color((0xFFFF),(0x001F));
- spi_tft.set_cursor(0,50);
- spi_tft.draw_hanzi_32("控制舵机");
- }
- //{ID:501,keyword:"命令词",ASR:"挺顺溜",ASRTO:"还行吧,谢谢鼓励"}
- if(snid == 501){
- digital_write((21),1);
- spi_tft.clear((0xFFFF));
- spi_tft.set_text_color((0x001F),(0xFFFF));
- spi_tft.set_cursor(0,50);
- spi_tft.draw_hanzi_32("谢谢鼓励");
- }
- }
-
- //{ID:250,keyword:"命令词",ASR:"最大音量",ASRTO:"音量调整到最大"}
- //{ID:251,keyword:"命令词",ASR:"中等音量",ASRTO:"音量调整到中等"}
- //{ID:252,keyword:"命令词",ASR:"最小音量",ASRTO:"音量调整到最小"}
- void sys_sleep_hook()
- {
- digitalWrite(4,1);
- digitalWrite(21,0);
-
- }
-
- void hardware_init(){
- spi_tft.init();
- digital_write((21),0);
- spi_tft.set_direction(2);
- spi_tft.set_text_wrap(true);
- spi_tft.set_text_size(32);
- spi_tft.set_bg_mode(1);
- digitalWrite(4,1);
- pinMode(4,output);
- servo_7.write(0);
- vTaskDelete(NULL);
- }
-
- void setup()
- {
- servo_7.attach(7);
- //{speak:欢欢-职业女声,vol:14,speed:10,platform:haohaodada}
- //{playid:10001,voice:欢迎使用人工智能AI语音助手,用智能管家唤醒我}
- //{playid:10002,voice:我退下了}
- //{ID:1,keyword:"命令词",ASR:"最小角度",ASRTO:"好的,舵机在零度"}
- //{ID:2,keyword:"命令词",ASR:"中等角度",ASRTO:"好的,舵机转到九十度"}
- //{ID:3,keyword:"命令词",ASR:"最大角度",ASRTO:"好的,舵机转到一百八十度"}
- pinMode(7,output);
- setPinFun(7,FIRST_FUNCTION);
- xTaskCreate(hardware_init,"hardware_init",256,NULL,100,NULL);
- }
生成模型与编译烧录
实验记录视频
https://www.bilibili.com/video/BV1Xa4y117Er/?share_source=copy_web&vd_source=371a292a55e5ca9be994cbb4a86cc987


|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






