|
11245| 46
|
[项目] 【花雕学编程】Arduino动手做(224)---CNC Shield的6个小实验 |
|
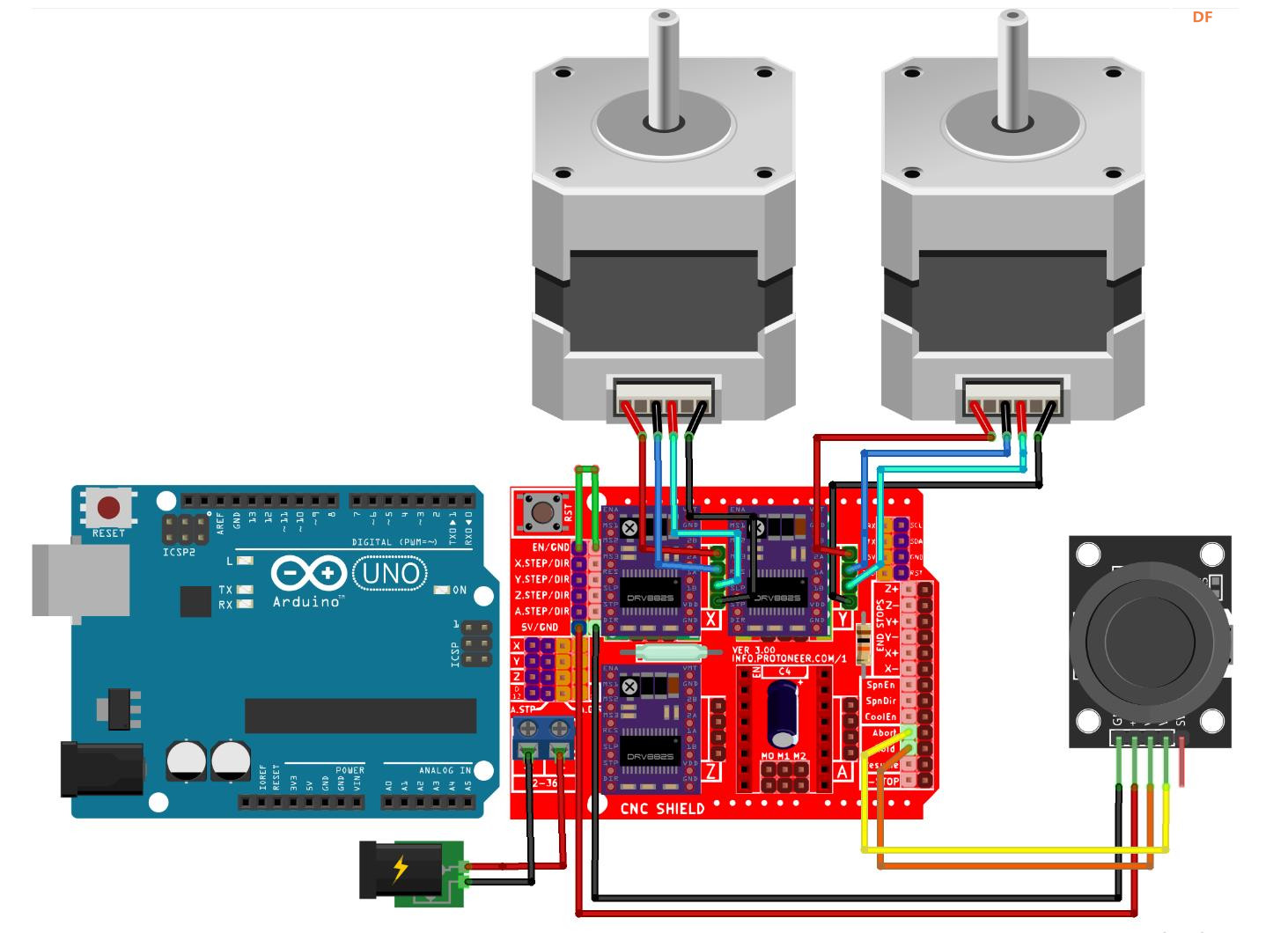
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十四:Arduino CNC Shield V3 步进电机拓展模块(驱动四只电机) 项目实验之六:用AccelStepper库控制四只步进电机X、Y、Z与A轴实现不同的转速 实验开源代码 |
|
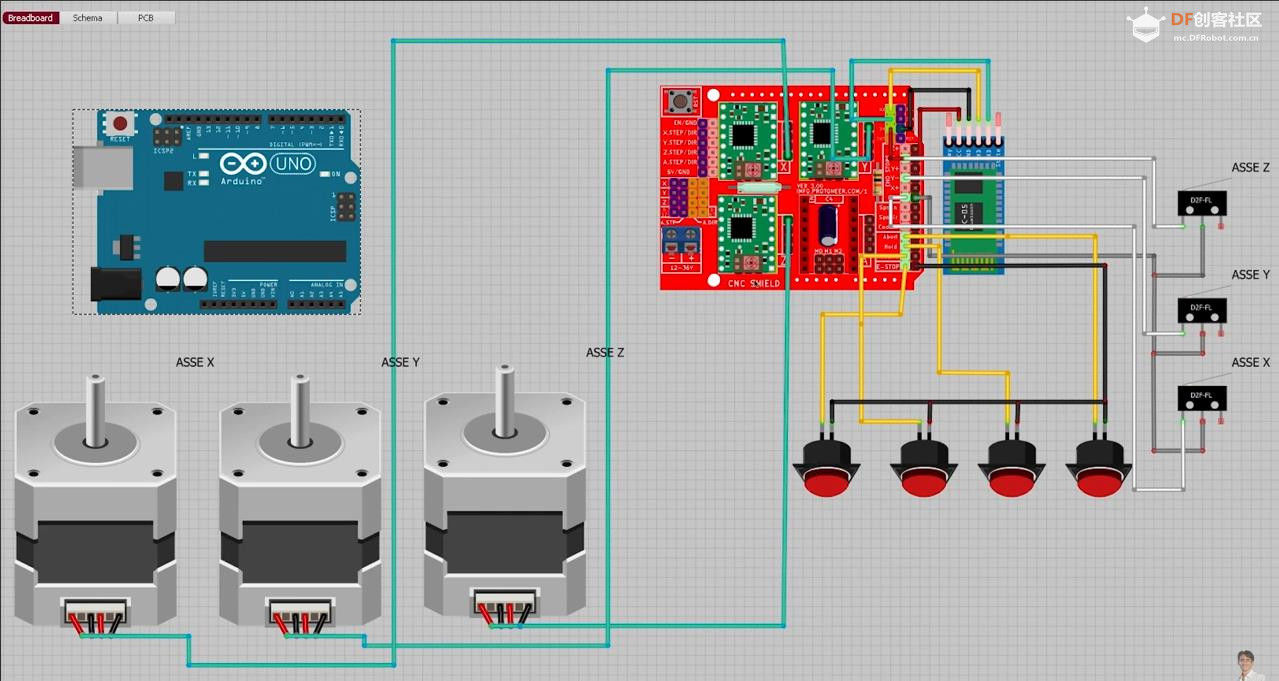
本帖最后由 驴友花雕 于 2024-7-25 07:30 编辑 项目实验之三:使用AccelStepper库驱动三只步进电机X、Y与Z 实现往复旋转 实验开源代码 |
|
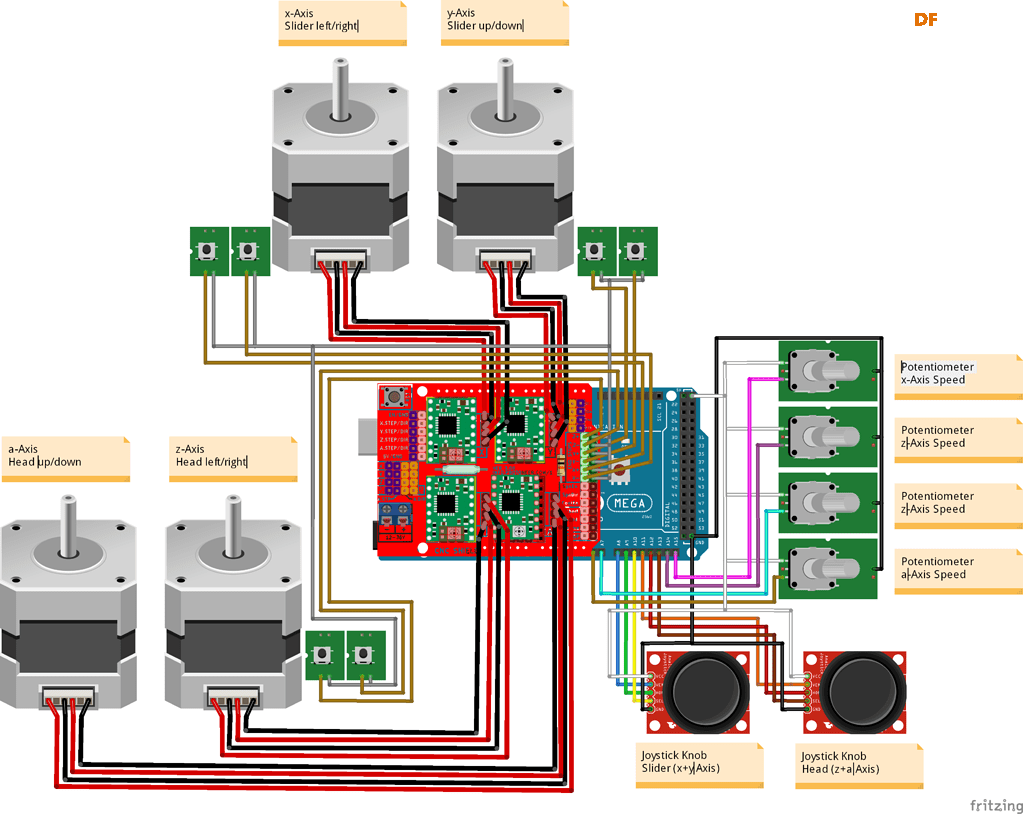
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十四:Arduino CNC Shield V3 步进电机拓展模块(驱动四只电机) 项目实验之五:无库控制四只步进电机X、Y、Z与A轴实现动态旋转 实验开源代码 |
|
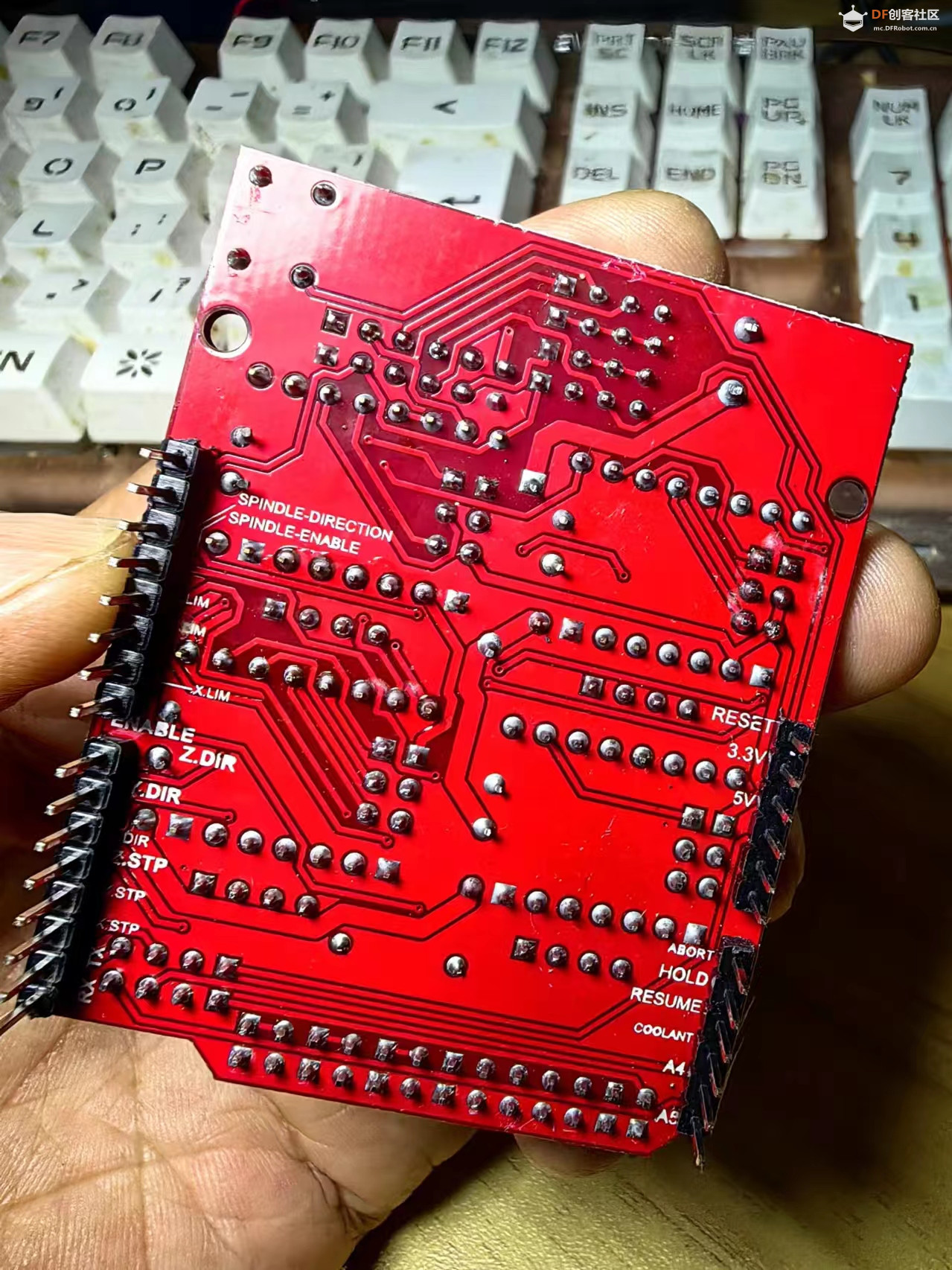
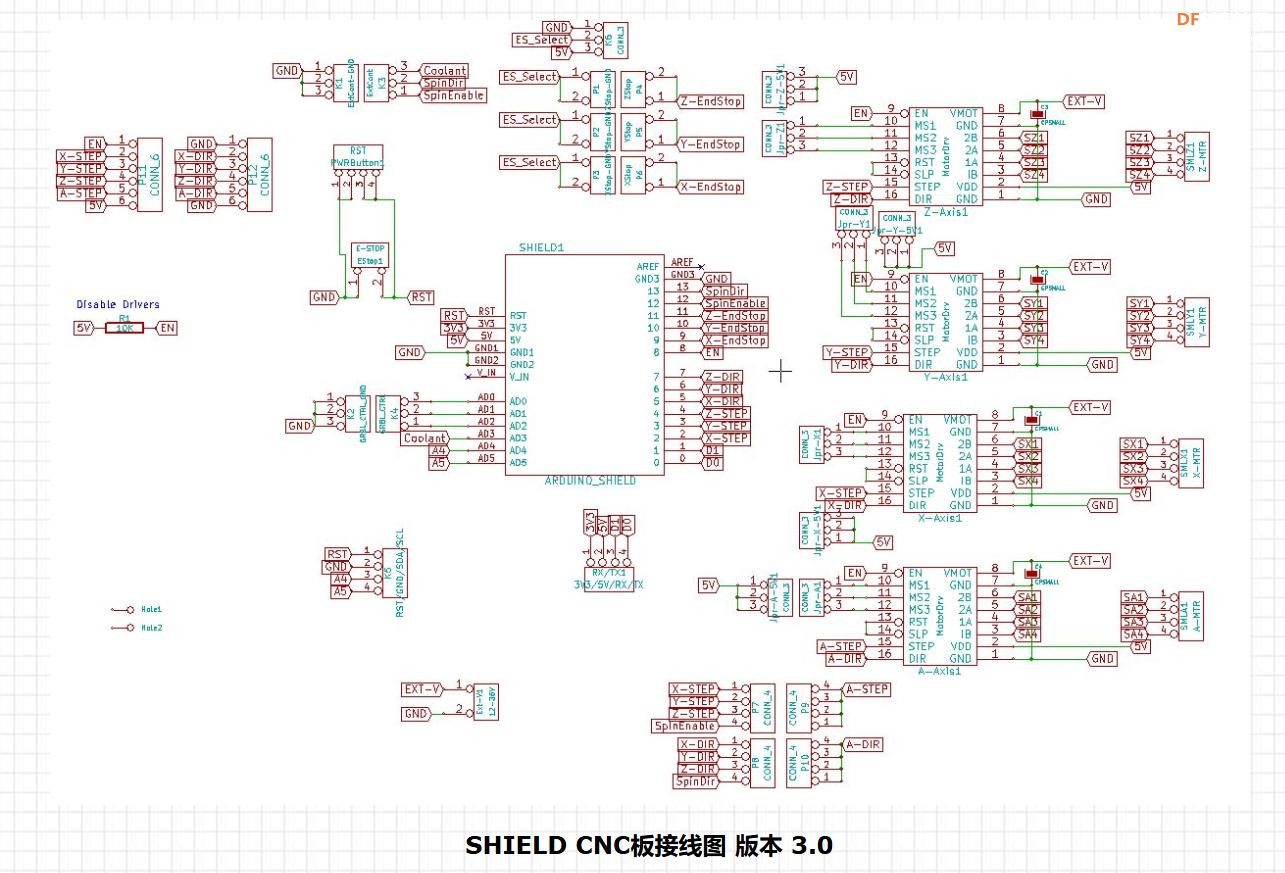
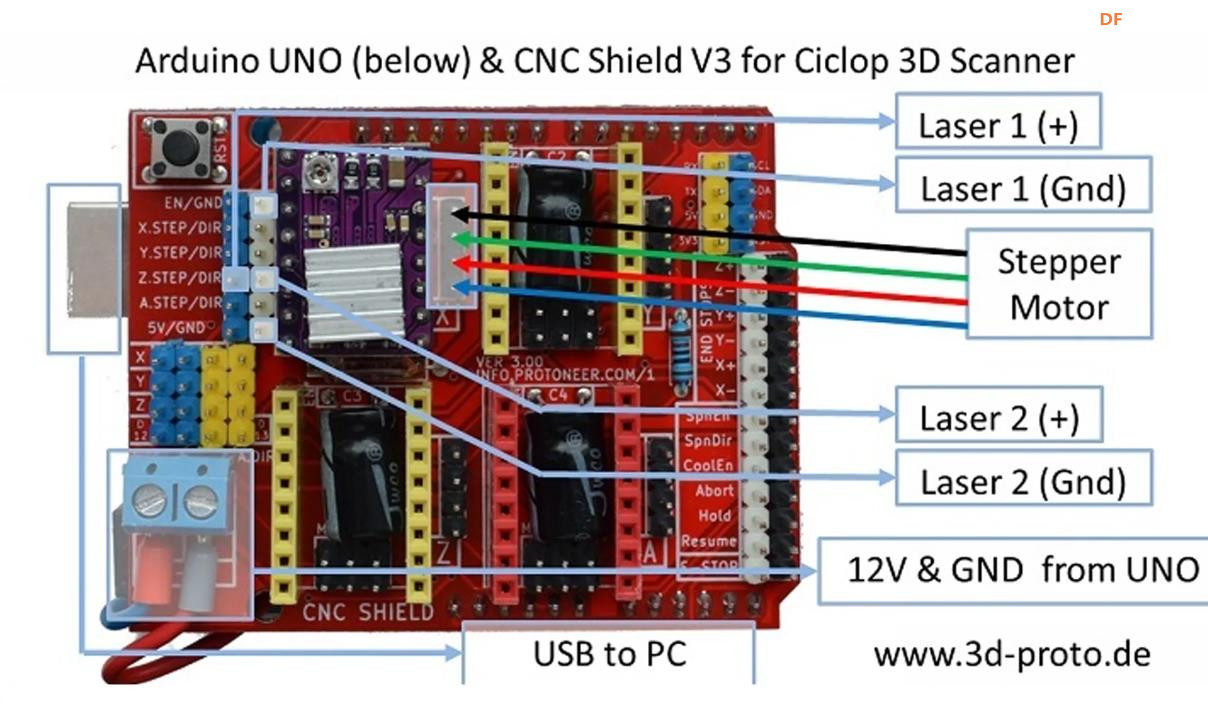
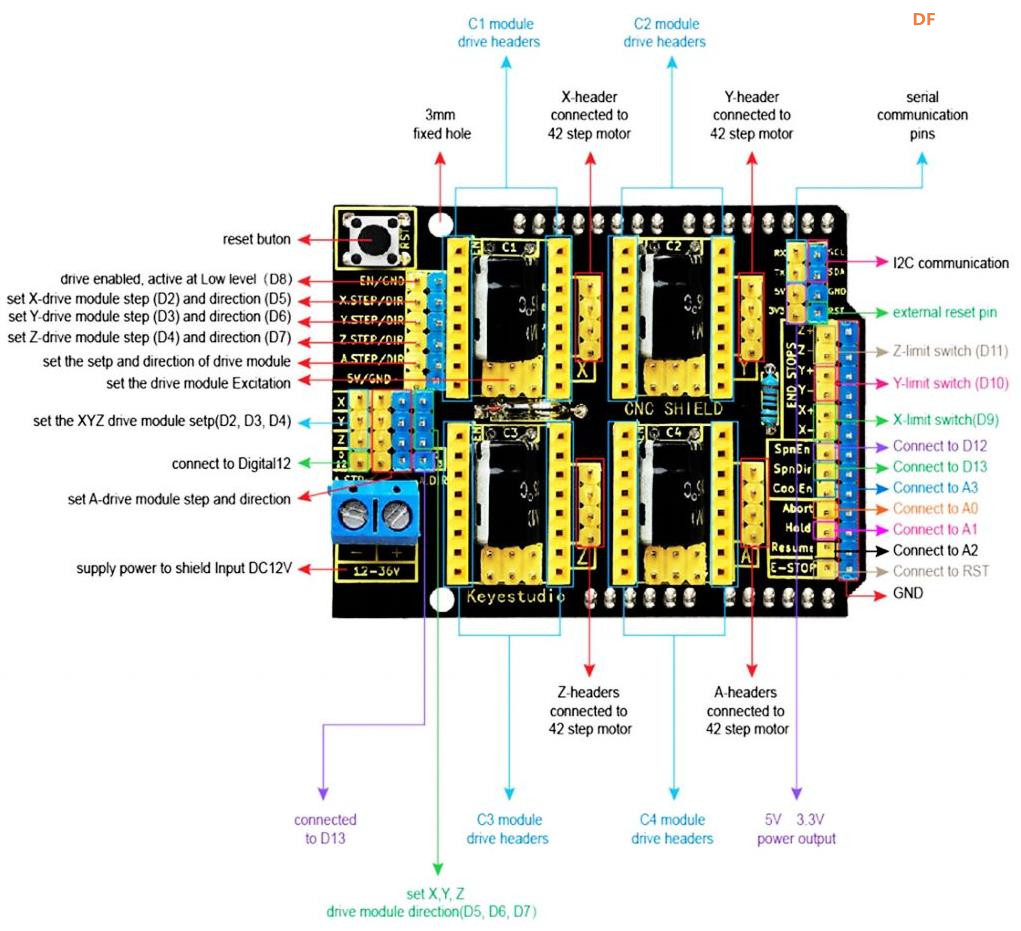
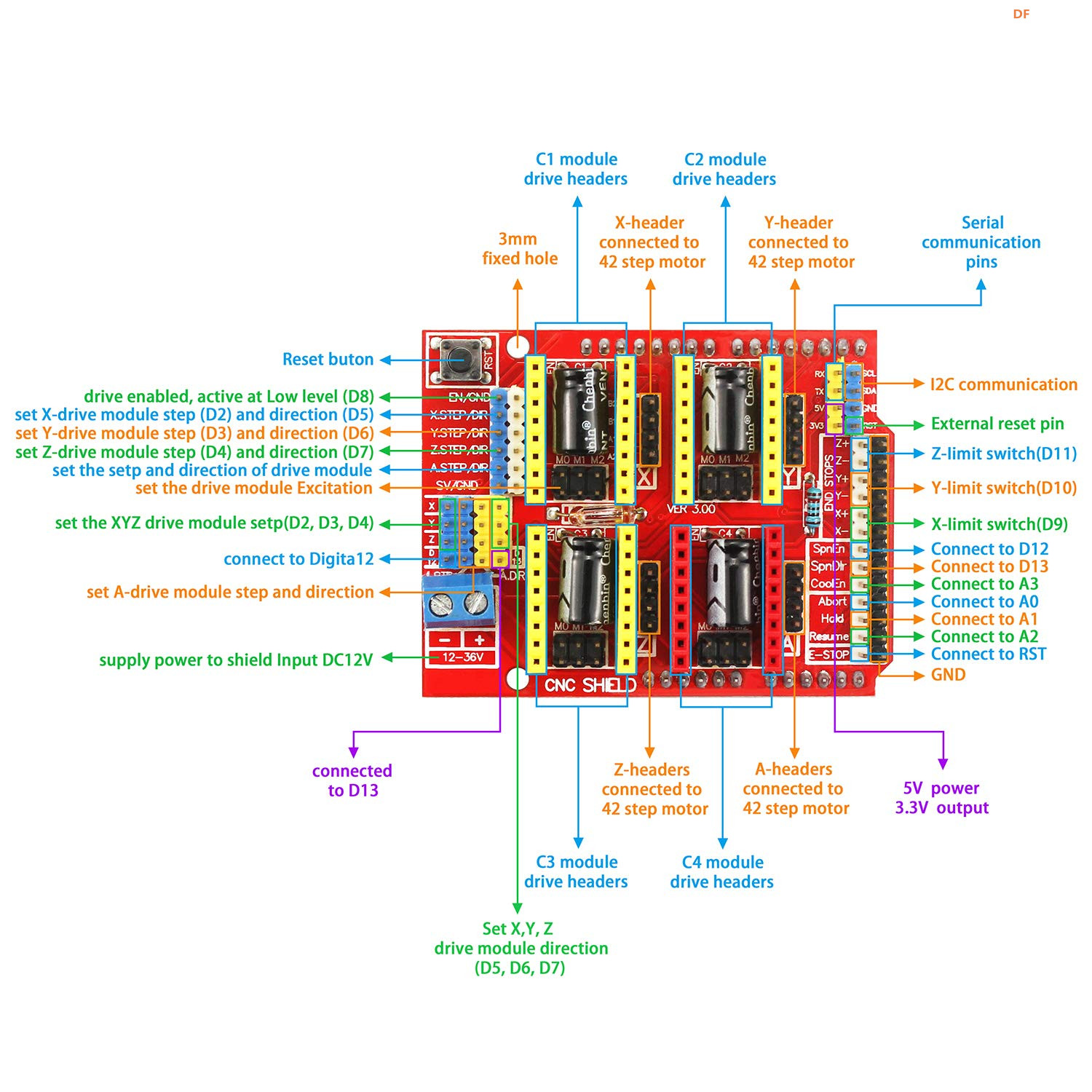
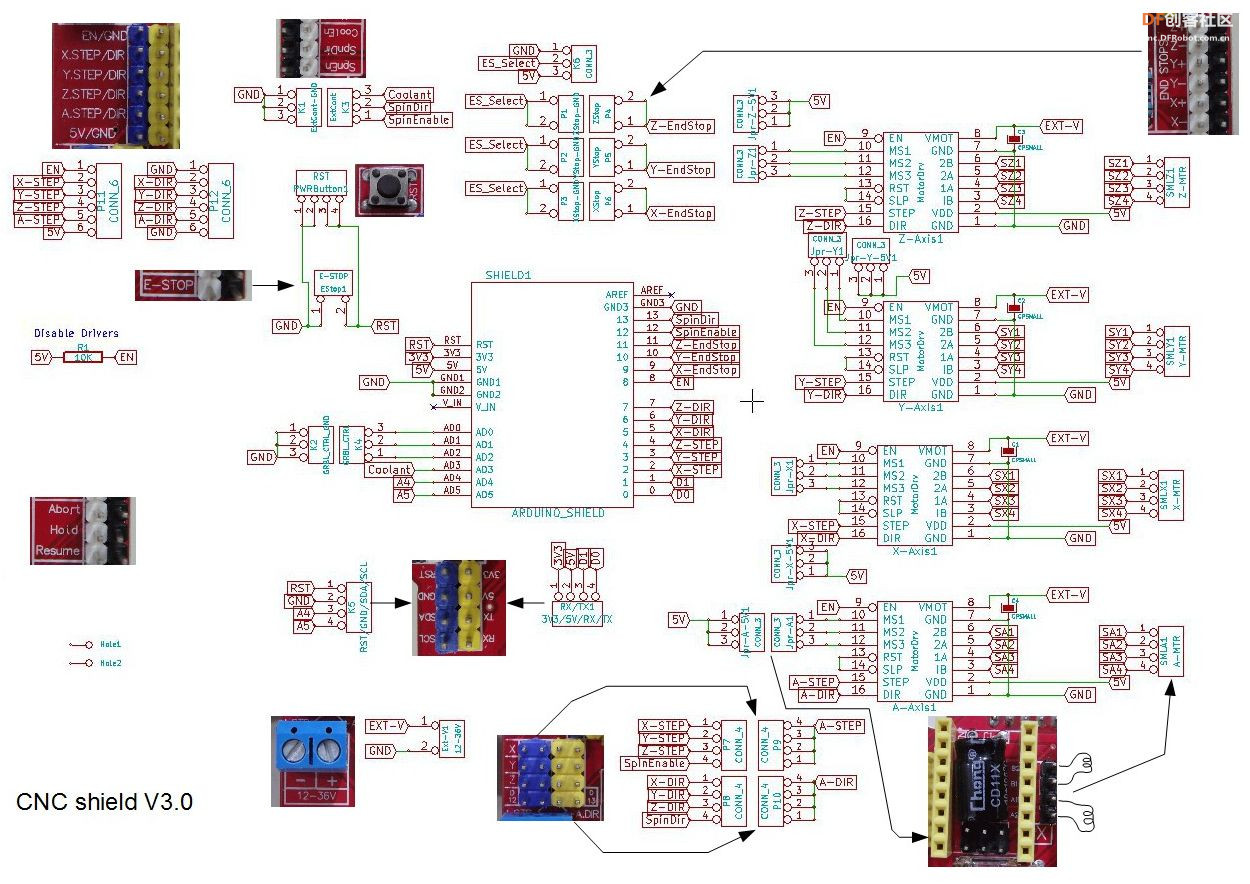
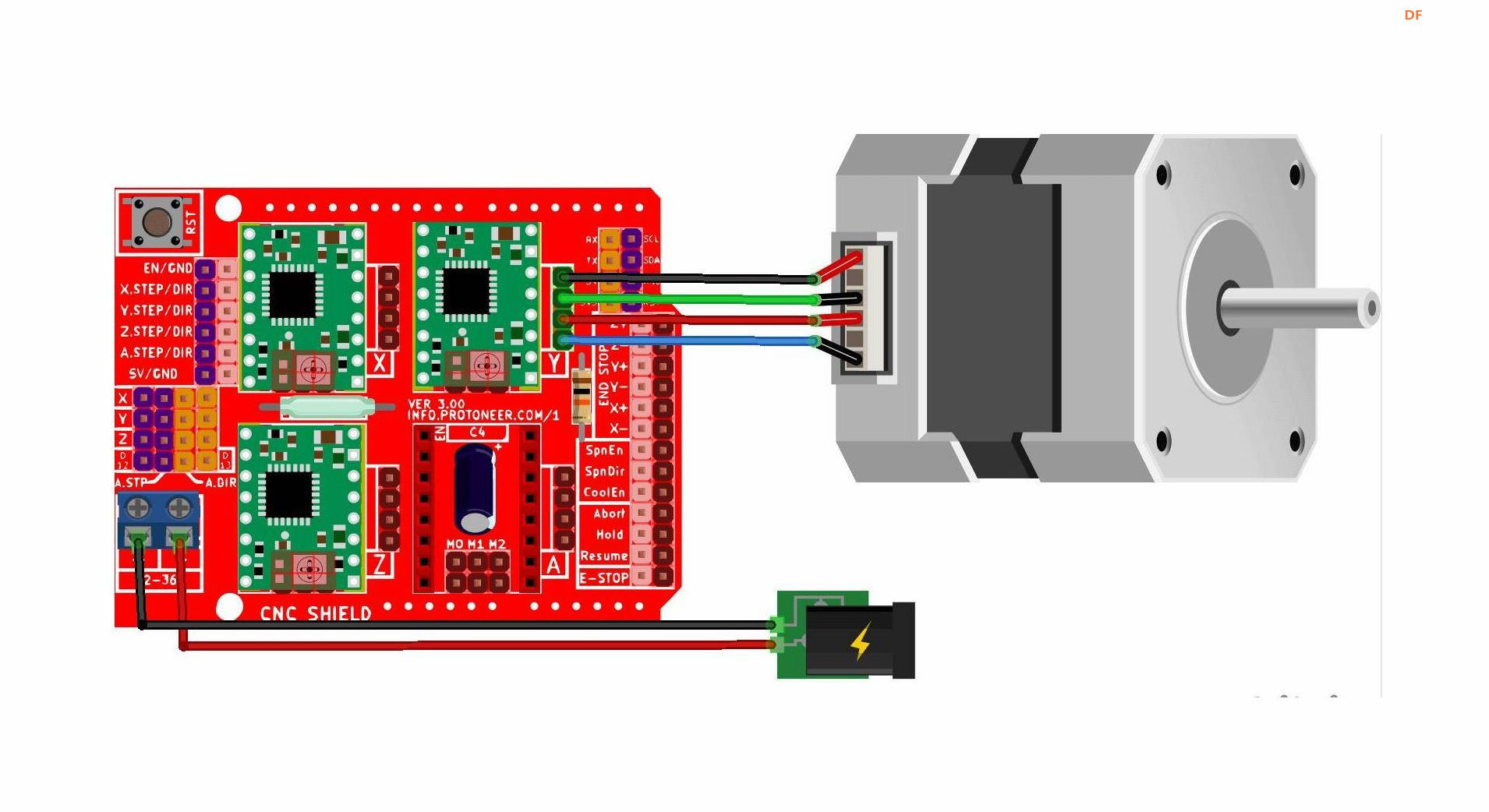
CNC Shield V3.0 是一款多功能扩展板,可让您创建基于 Arduino UNO 控制器(或其模拟)的 CNC 机器(3D 打印机、打标机、雕刻机、铣床、等离子切割机等)。扩展板直接连接到控制器(CNC Shield 插在 Arduino UNO 上)。这种电路板与 A4988、DRV8825 或其类似物的组合可以控制 4 轴(包括设置步进电机的微步进模式)、主轴(主轴激活、主轴方向控制、冷却液供应)以及连接限位开关和控制按钮。要开始运行这样一组电子设备,必须输入GRBL Arduino固件(控制器使用G代码与PC交换信息)。以下软件可用于发送 G 代码:GRBL 控制器、蜡烛、通用 G 代码发送器或类似物。 应用:铣床、雕刻机、等离子切割机、打标机、3D打印机、自动化系统等。 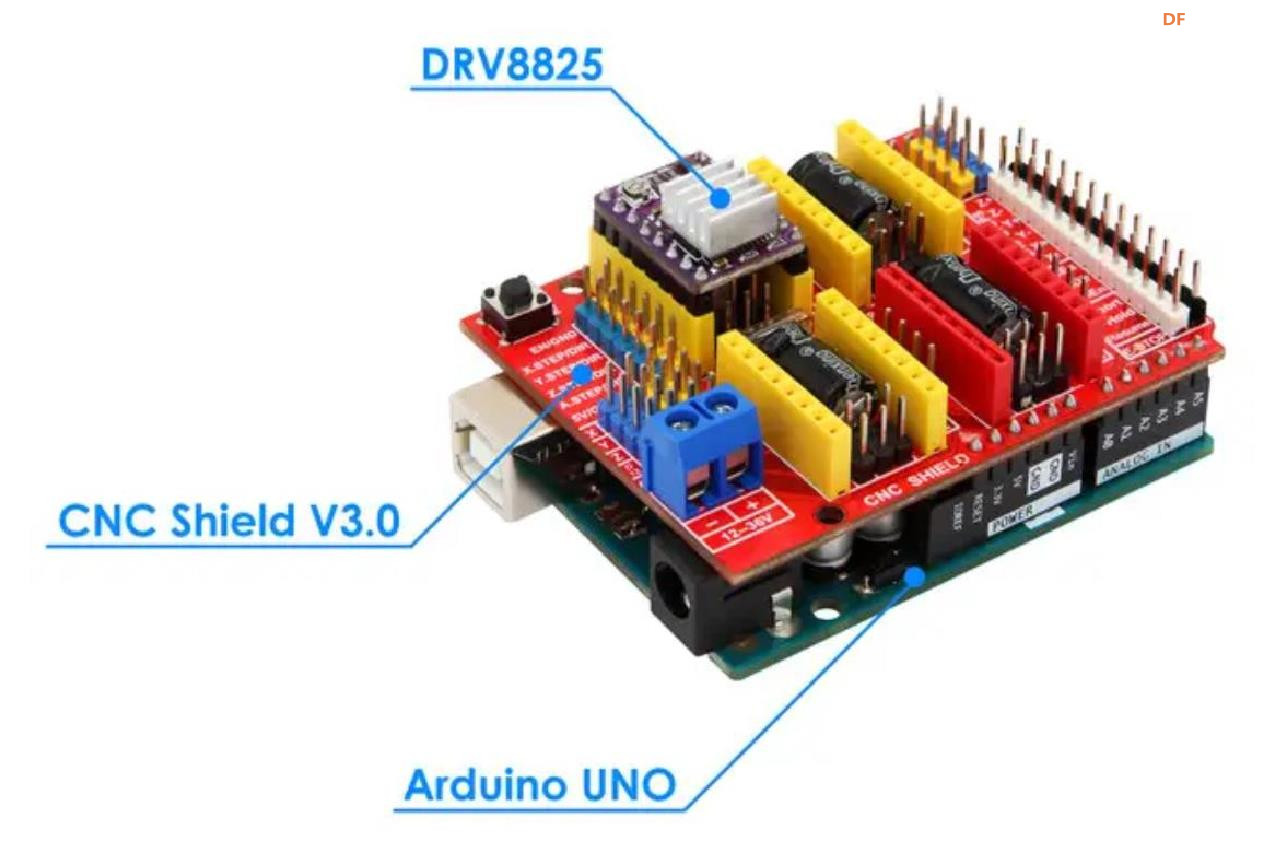 |
|
技术规格 品牌:Protoneer 型:CNC扩展板 版本: 3.0 控制轴数:4(X、Y、Z、A) 兼容控制板:Arduino UNO 或同等产品 兼容驱动程序:A4988、5 或同等产品A4988, 微步调整:现在 主轴控制:存在 逻辑器件电源电压:5 电源电压:12-36V 接口:UART、I2C 控制器固件:GRBL:v0.6b、v0.7d、v0.8c、v0.9g 尺寸:68x52.5x18.5 mm 重量: 31 克 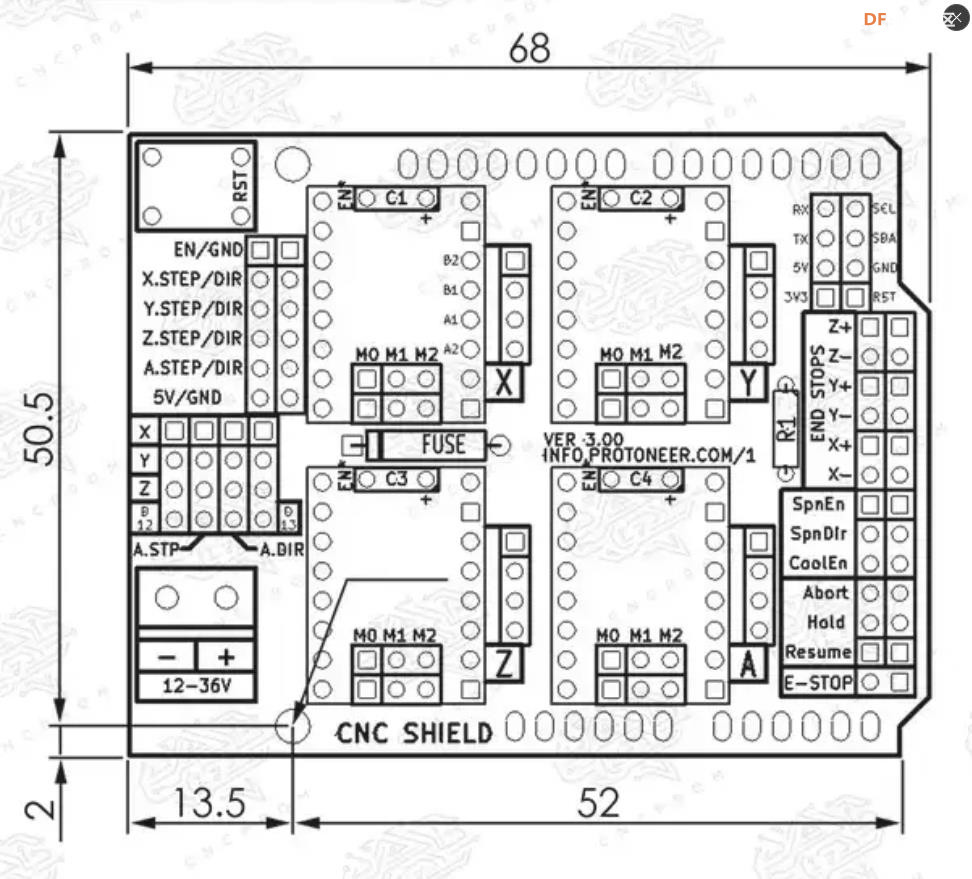 |
|
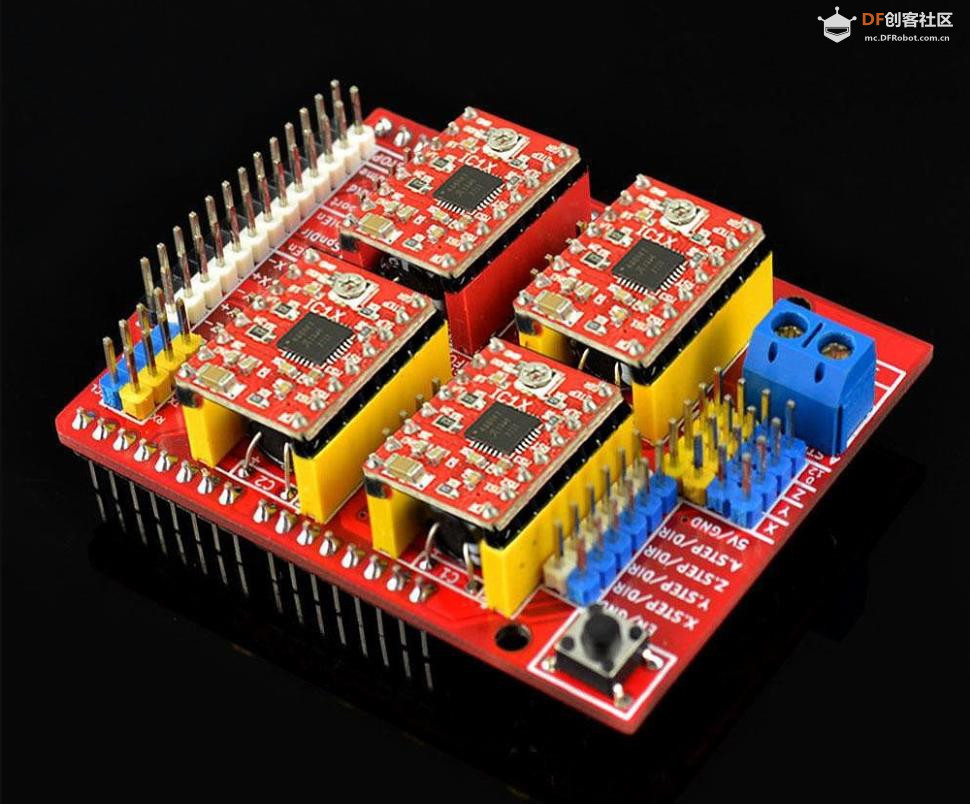
Arduino CNC 电机扩展板概述 CNC是计算机数字控制(Computerized Numerical Control )的英文缩写。顾名思义,Arduino CNC电机扩展板常用于驱动3D打印机、机械臂或机器人系统中的NEMA17电机(俗称42步进电机)。假如您想要用Arduino扩展板来驱动直流电机或28BYJ-48步进电机,推荐使用AFMotor电机扩展板。CNC扩展板可以支持A4988、DRV8825等步进电机驱动板。 精心设计的CNC解决方案,采用Arduino CNC Shield V3.0步进电机扩展模块(支持四轴驱动),为您的DIY项目提供无限可能。无论是打造个性化的雕刻机、创新的3D打印机、智能的写字机、艺术化的画蛋机、精密的微型铣钻床、灵活的多轴机械臂,还是多功能的轮式机器人,这款模块都能满足您的需求。 它不仅简化了复杂的机械控制过程,更以其卓越的性能和可靠性,成为您创意实现的强大助手。无论是初学者还是资深爱好者,Arduino CNC Shield V3.0都能助您一臂之力,将创意转化为现实。 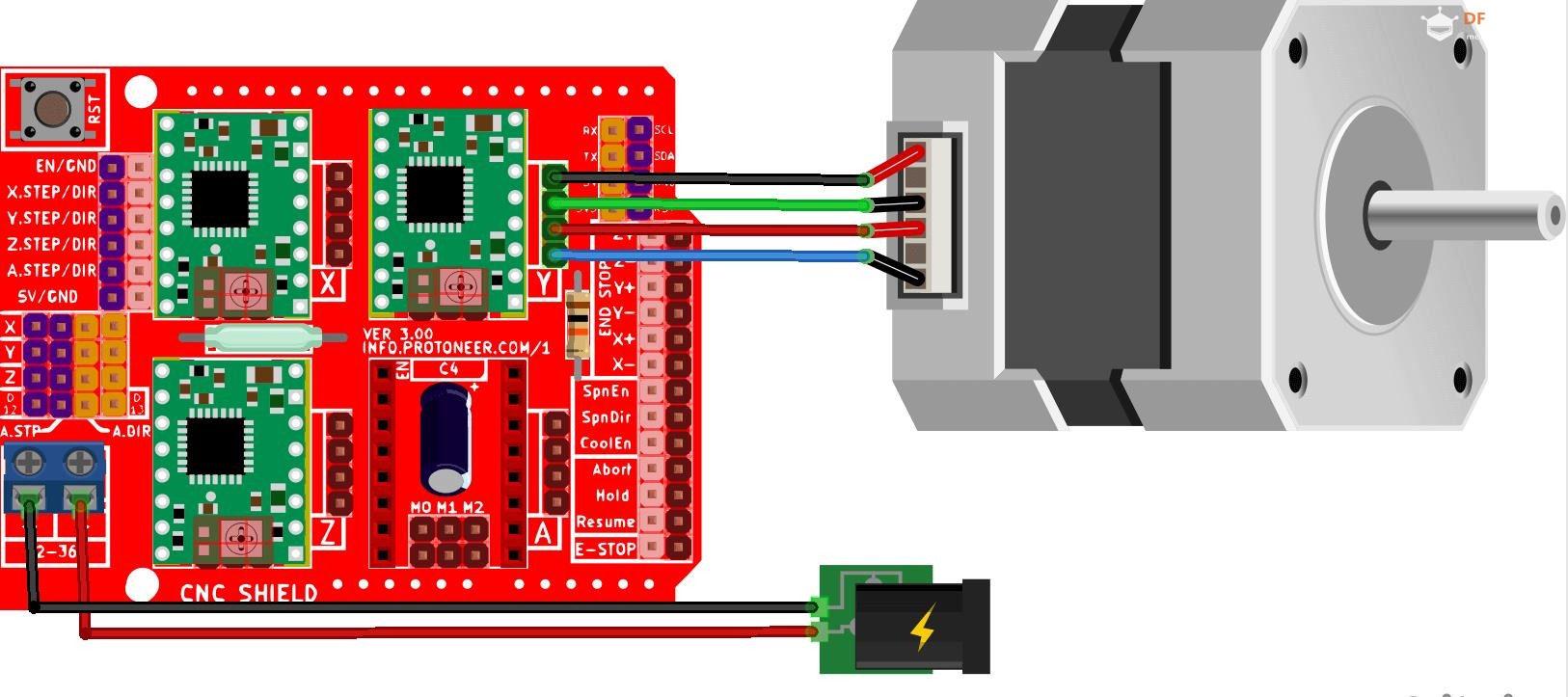 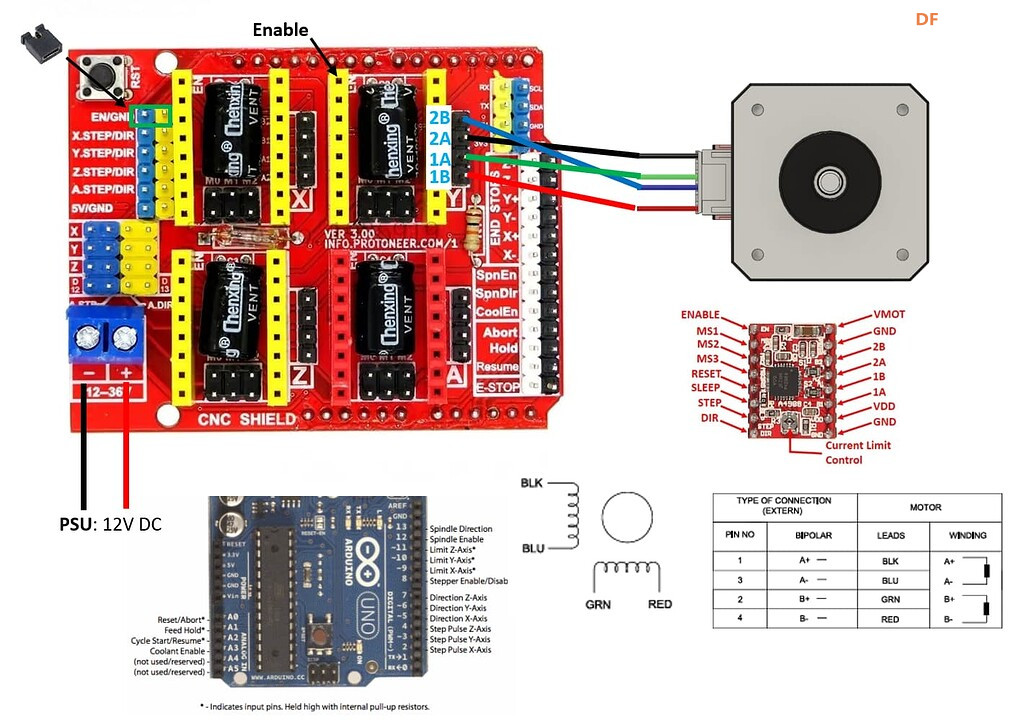 |
|
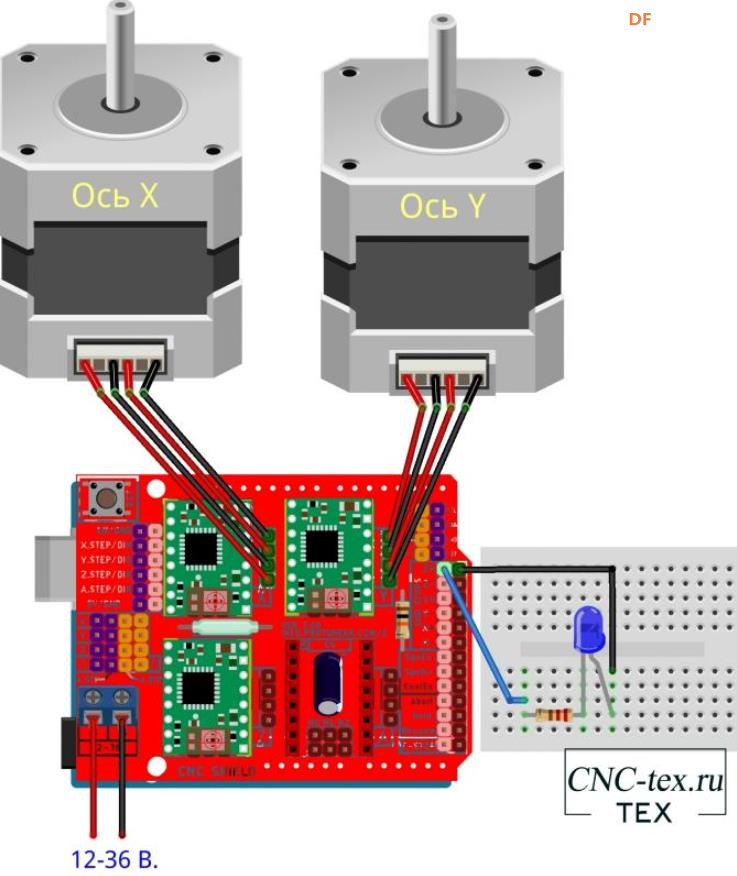
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十四:Arduino CNC Shield V3 步进电机拓展模块(驱动四只电机) 项目实验之一:CNC Shield 驱动一只步进电机Y实现往复旋转 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶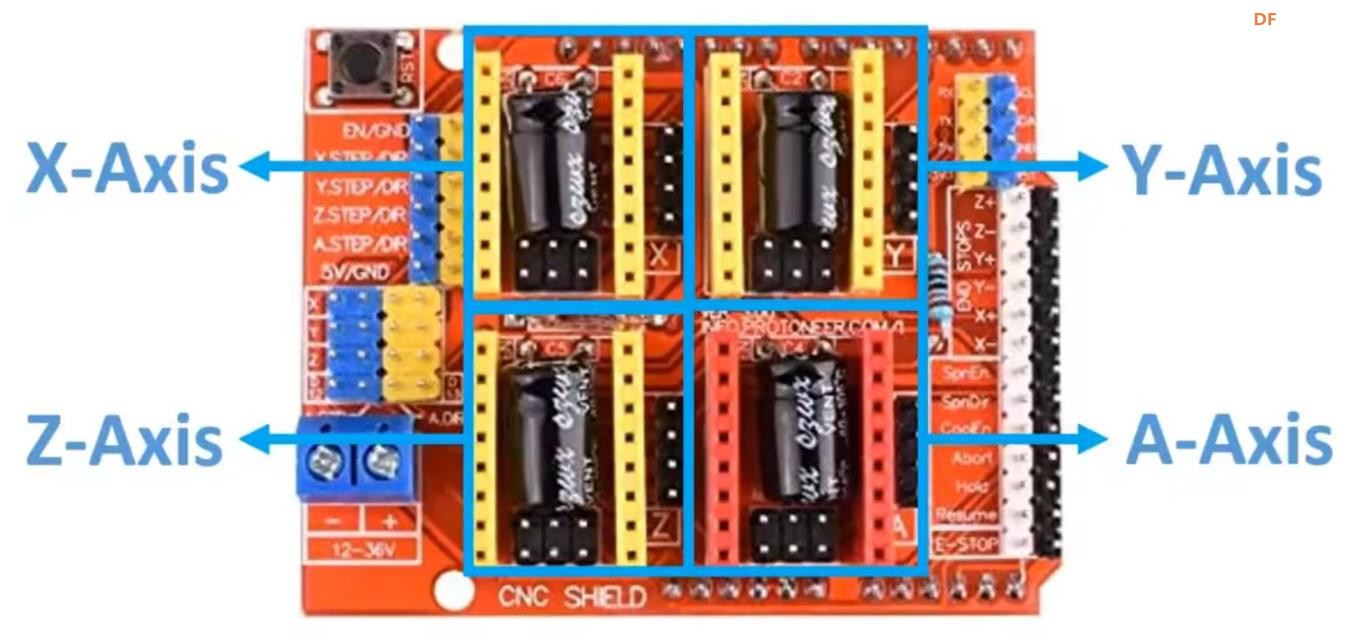













 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






