|
12002| 0
|
[K10项目分享] 行空板K10闪电麦昆车——智能玩具车改造项目 |

本帖最后由 云天 于 2025-2-1 10:39 编辑  项目来源 为满足《义务教育信息科技课程标准(2022年版)》中对物联网与人工智能的实践要求,结合跨学科主题“智能玩具设计”,设计了“行空板K10智能玩具车改造项目”。该项目旨在通过改造普通玩具车,激发学生对物联网、人工智能和编程的兴趣,同时培养学生的动手能力和创新思维。 项目介绍 在“行空板K10智能玩具车改造项目”中,学生将使用行空板K10对普通玩具车进行智能化改造。通过在玩具车窗处开口,将行空板K10的屏幕作为“眼睛”,显示动画效果。同时,使用行空板K10的P0、P1、P2、P15引脚连接L298N直流电机驱动模块,驱动N20电机,替换原有前轮两个车轮,实现玩具车的运动控制。项目中还结合了语音识别和物联网平台Easy IOT,通过语音指令和远程手柄控制玩具车的运动。 项目知识点 本项目贴合新课标中物联网与人工智能的内容要求,核心教学以下知识点:
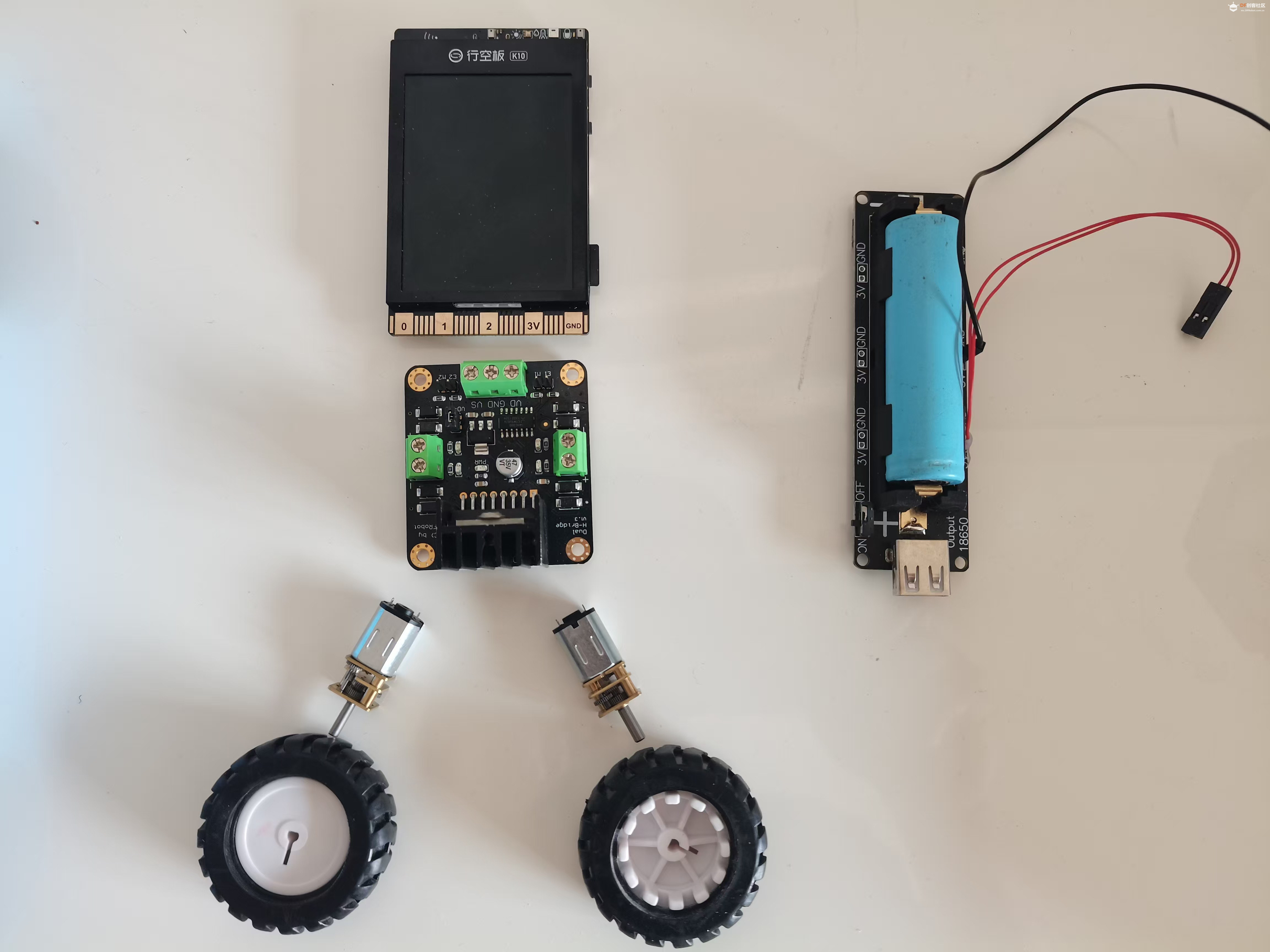
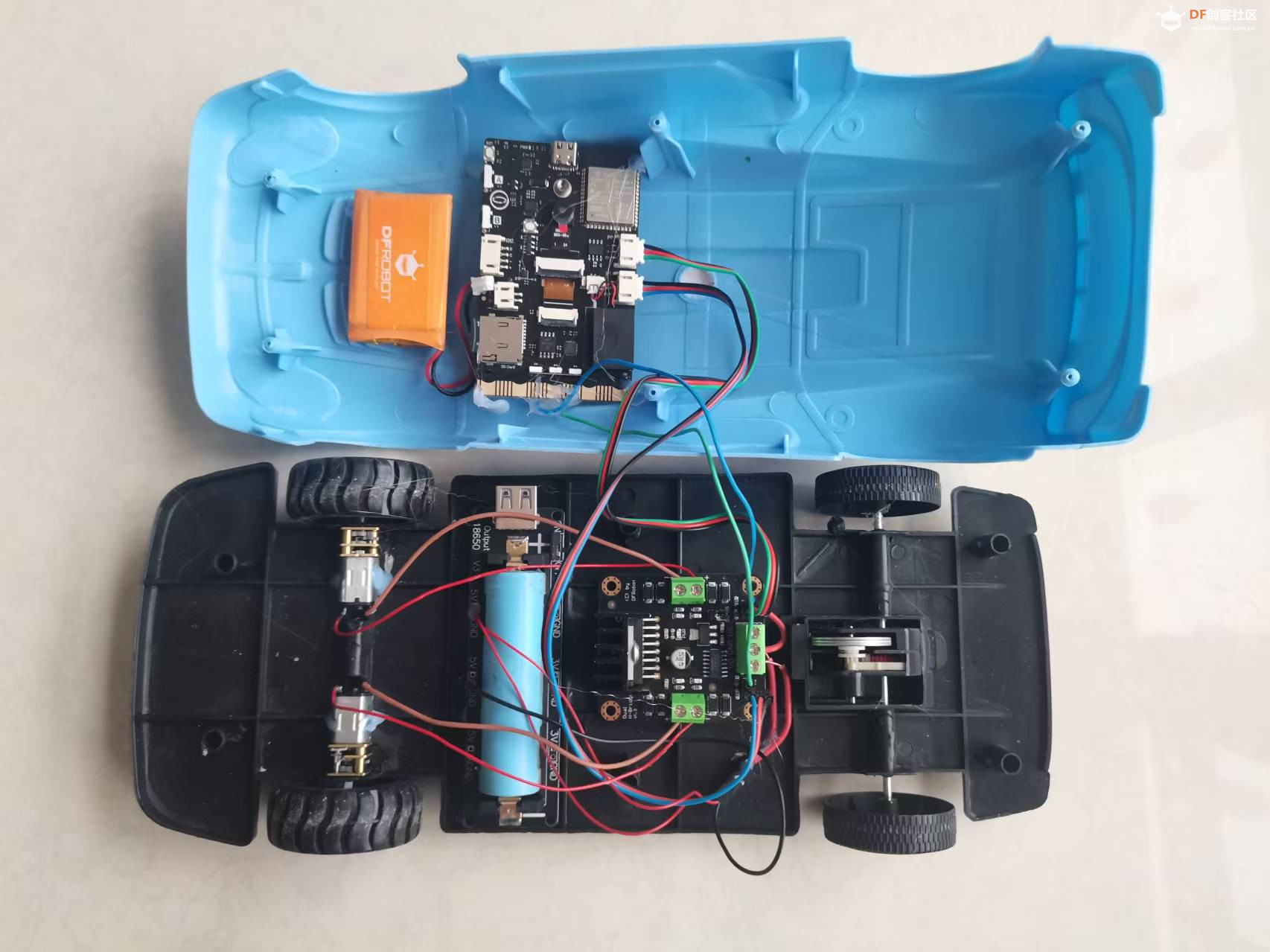
项目原理 本项目基于物联网架构,通过行空板K10实现玩具车的智能化控制。玩具车的运动由行空板K10通过L298N直流电机驱动模块控制,语音识别模块用于接收语音指令,物联网平台Easy IOT用于接收远程手柄的控制指令。项目中还利用行空板K10的屏幕显示眼睛动画,增强玩具车的趣味性。 硬件介绍 在“行空板K10智能玩具车改造项目”中,使用以下硬件实现功能:
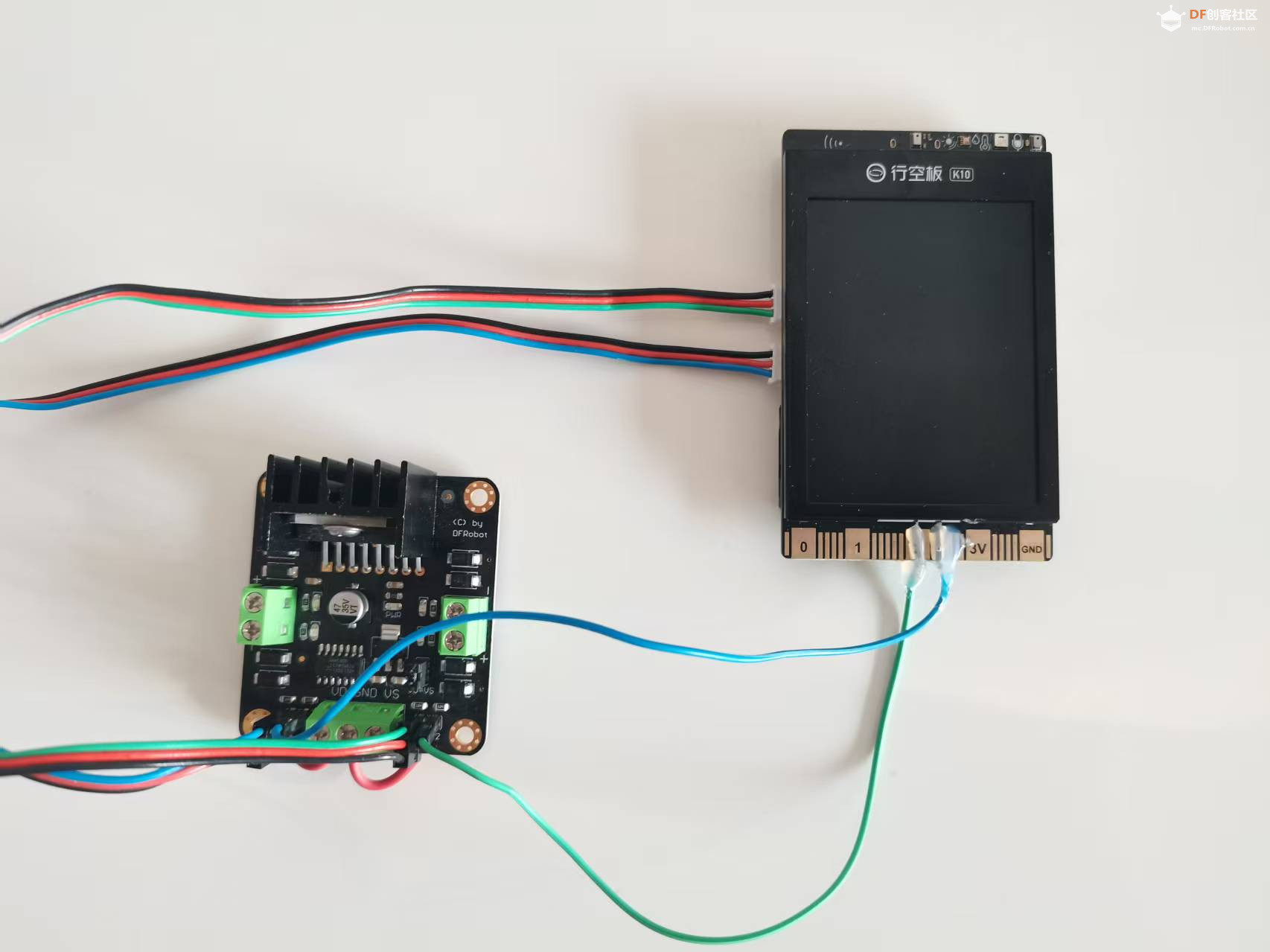
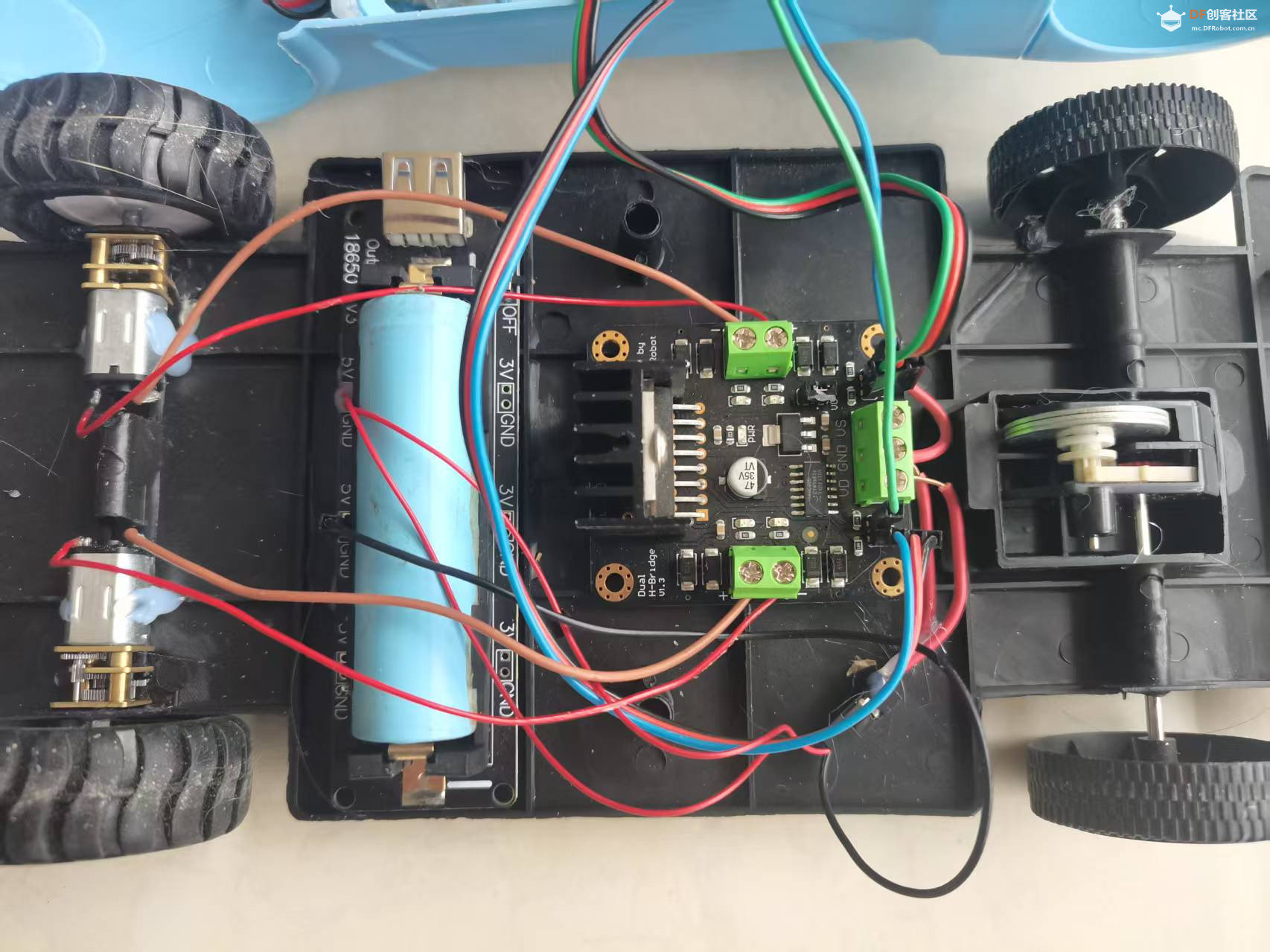
   硬件接线 硬件接线原理图如下:
      流程图 项目的功能流程如下:
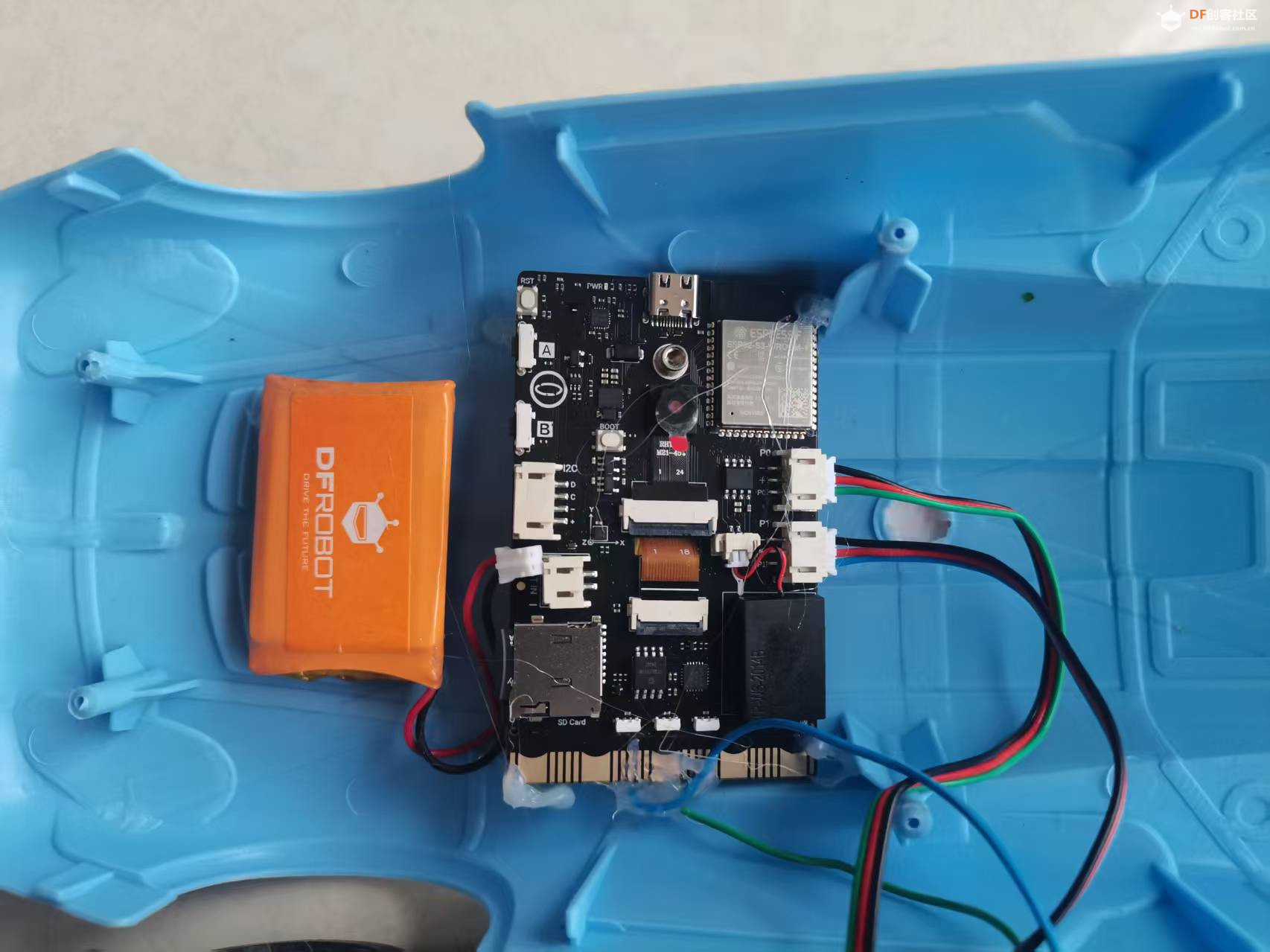
重点程序截图 以下是部分程序代码: 1.玩具车内行空板程序: 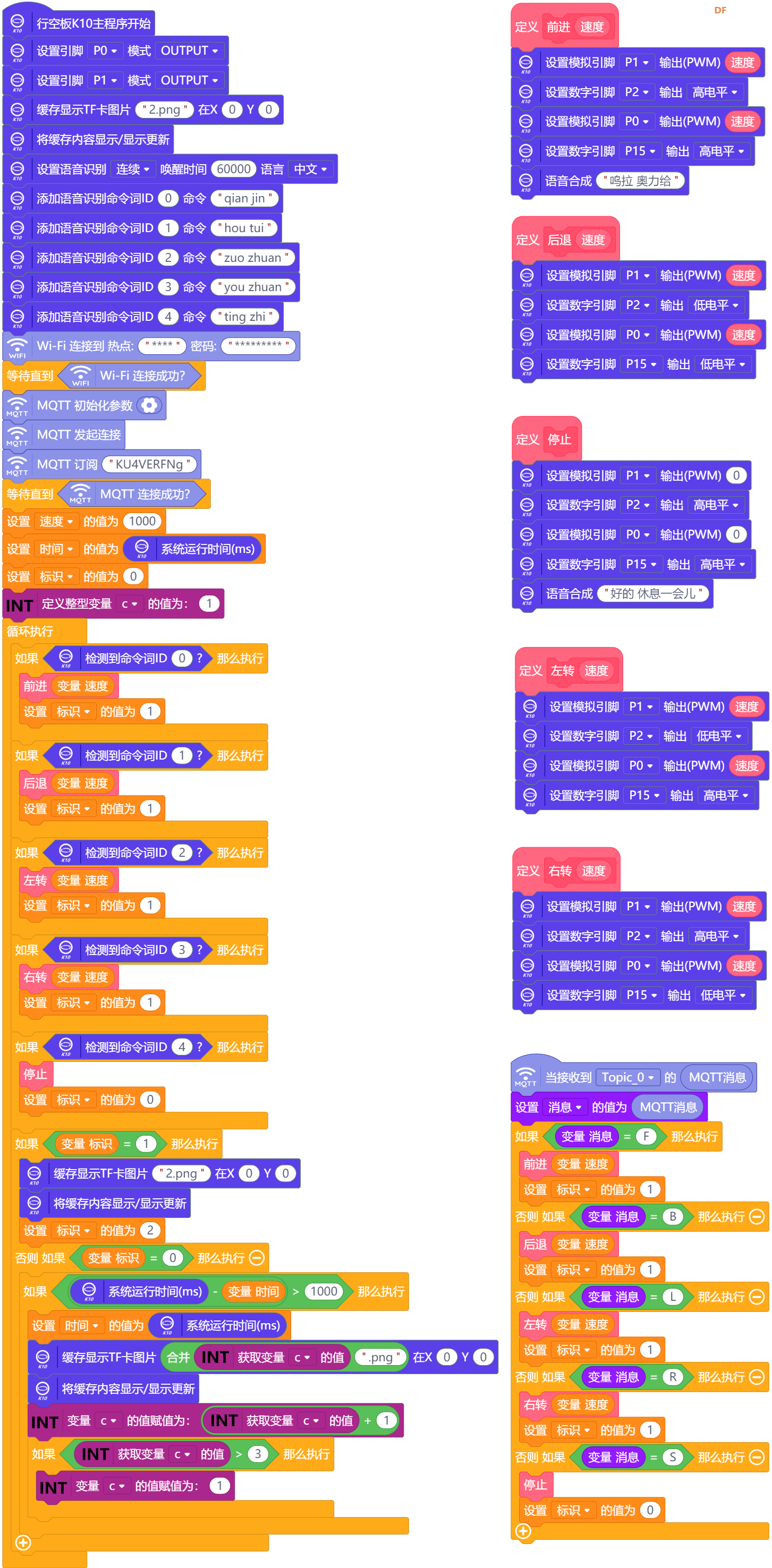 2.手柄行空板程序: 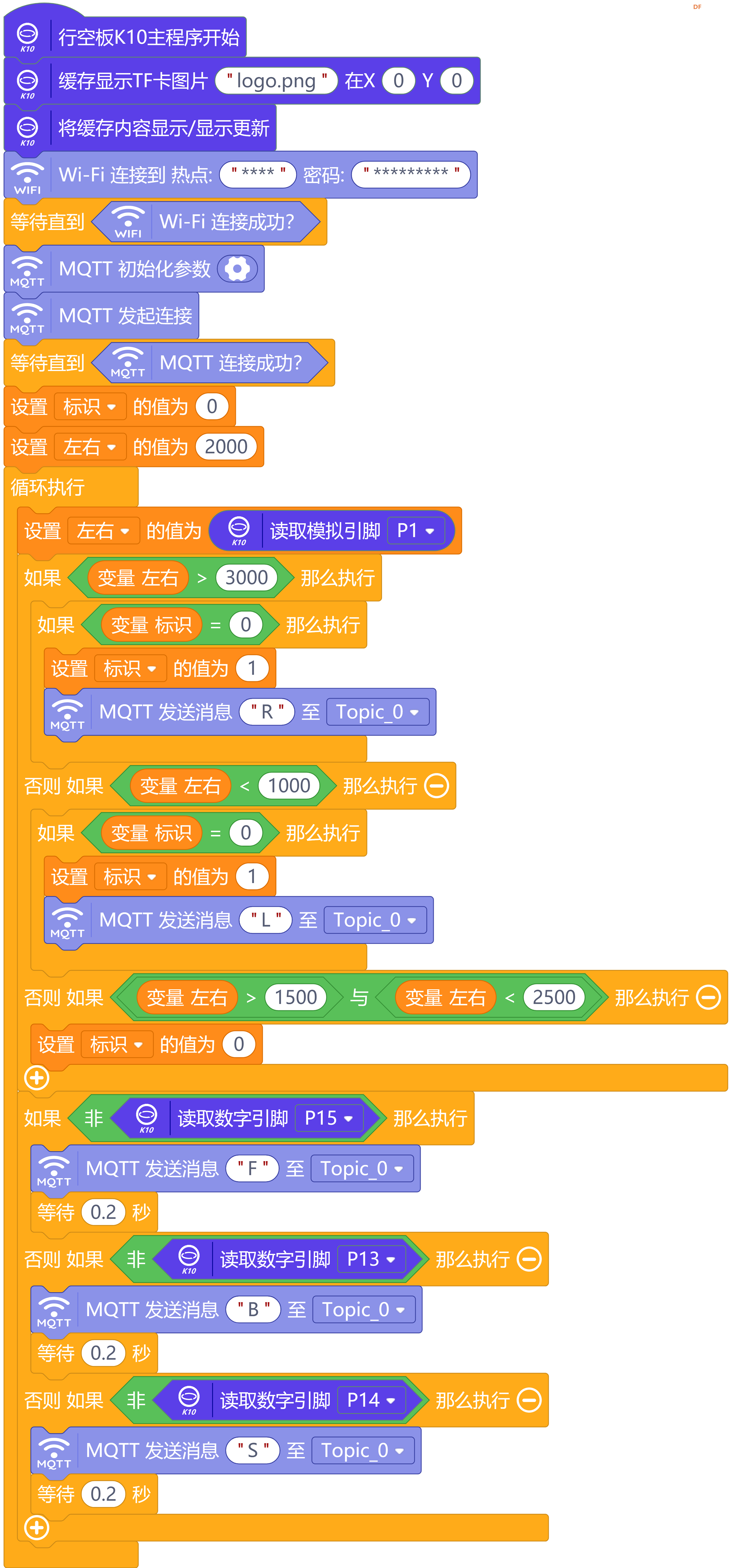 外观结构设计 为了便于课堂教学和项目展示,使用激光切割技术为玩具车设计了独特的外观结构。在玩具车窗处开口,安装行空板K10的屏幕,用于显示眼睛动画。整体造型模仿闪电麦昆车,增强项目的趣味性和吸引力。      演示视频 项目总结 “行空板K10智能玩具车改造项目”通过物联网和语音识别技术实现了玩具车的智能化控制,培养了学生的物联网应用能力和编程能力。该项目不仅符合新课标的要求,还激发了学生的创造力和动手能力,让学生在实践中学习和探索。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






