|
2319| 3
|
[项目] 【Arduino 动手做】The Claw:3D 打印的机器人爪子 |
|
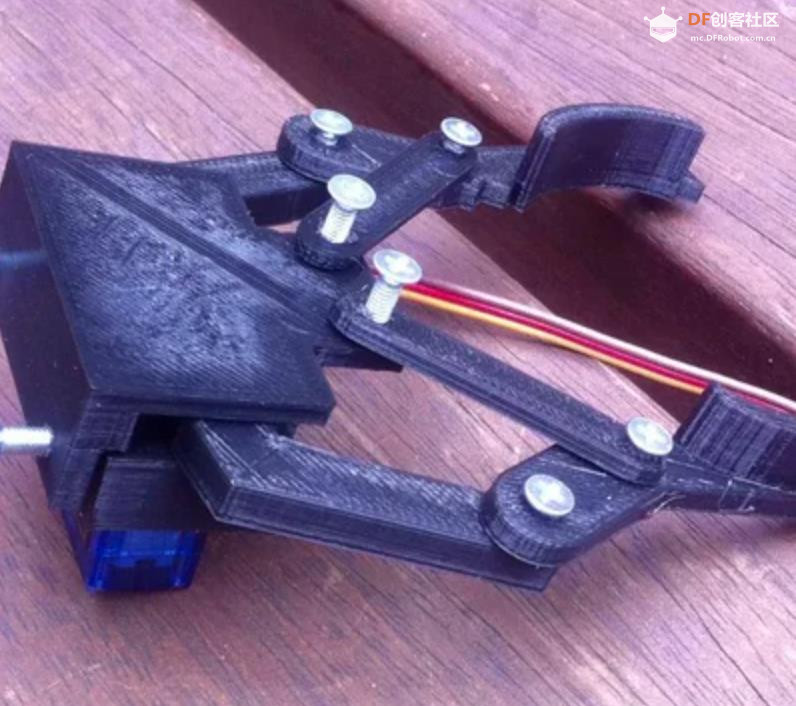
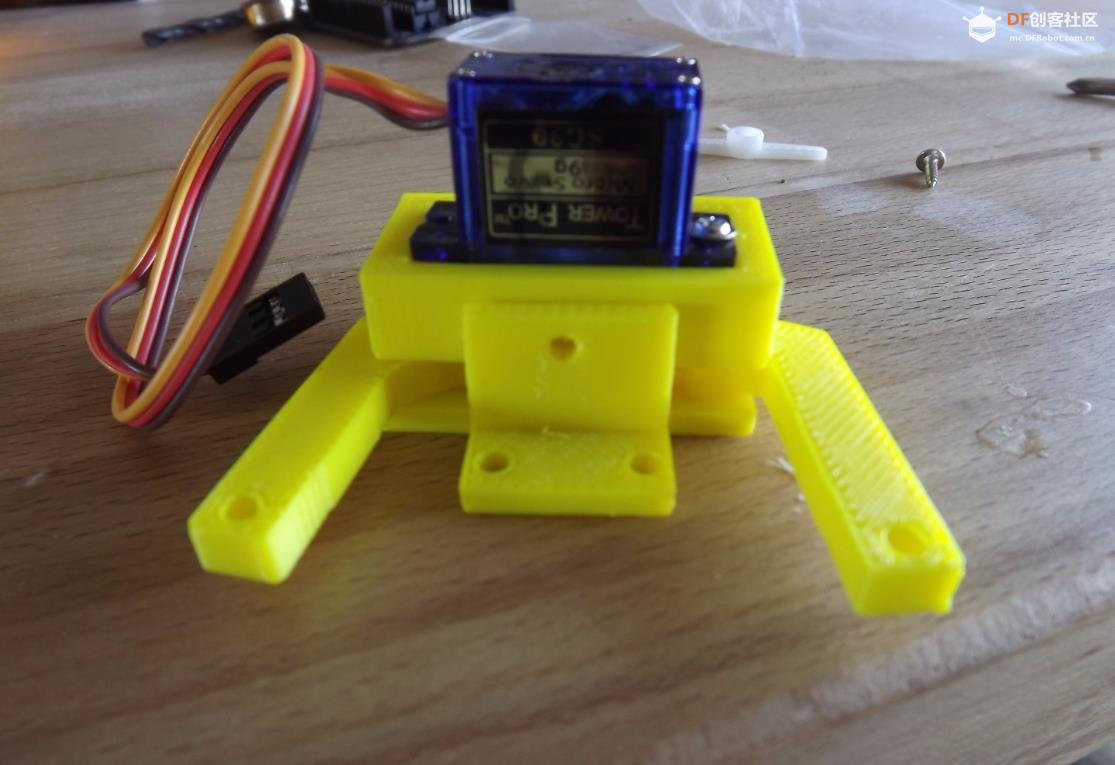
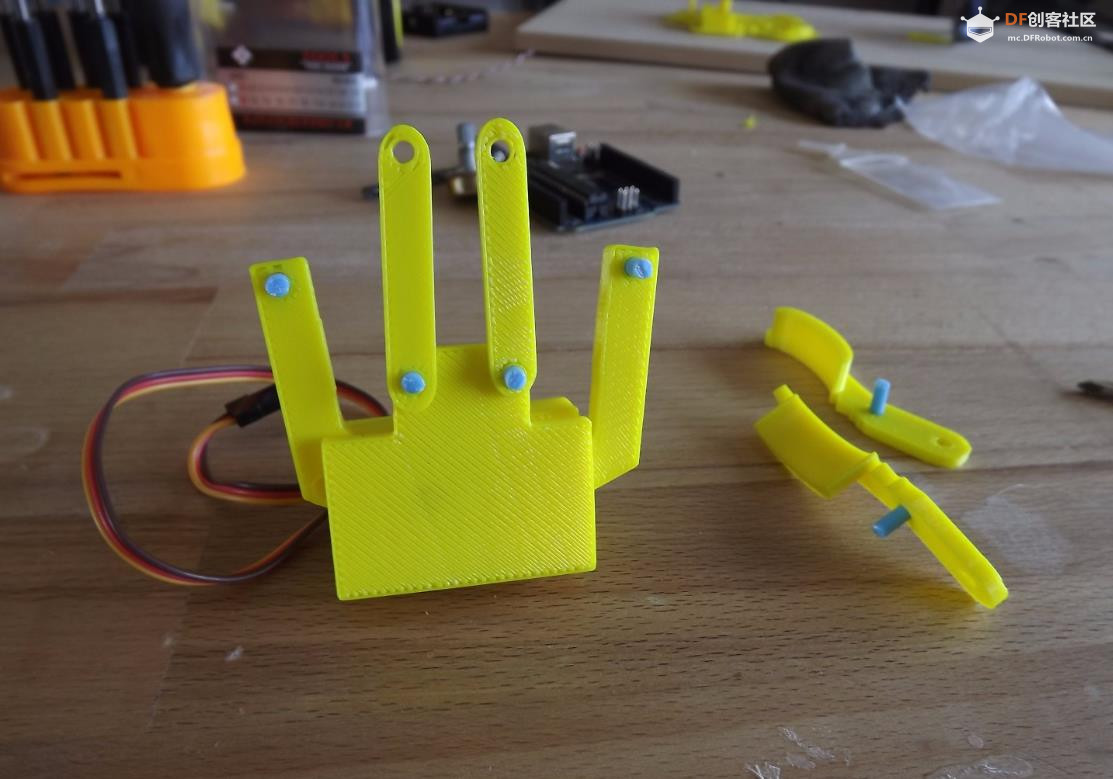
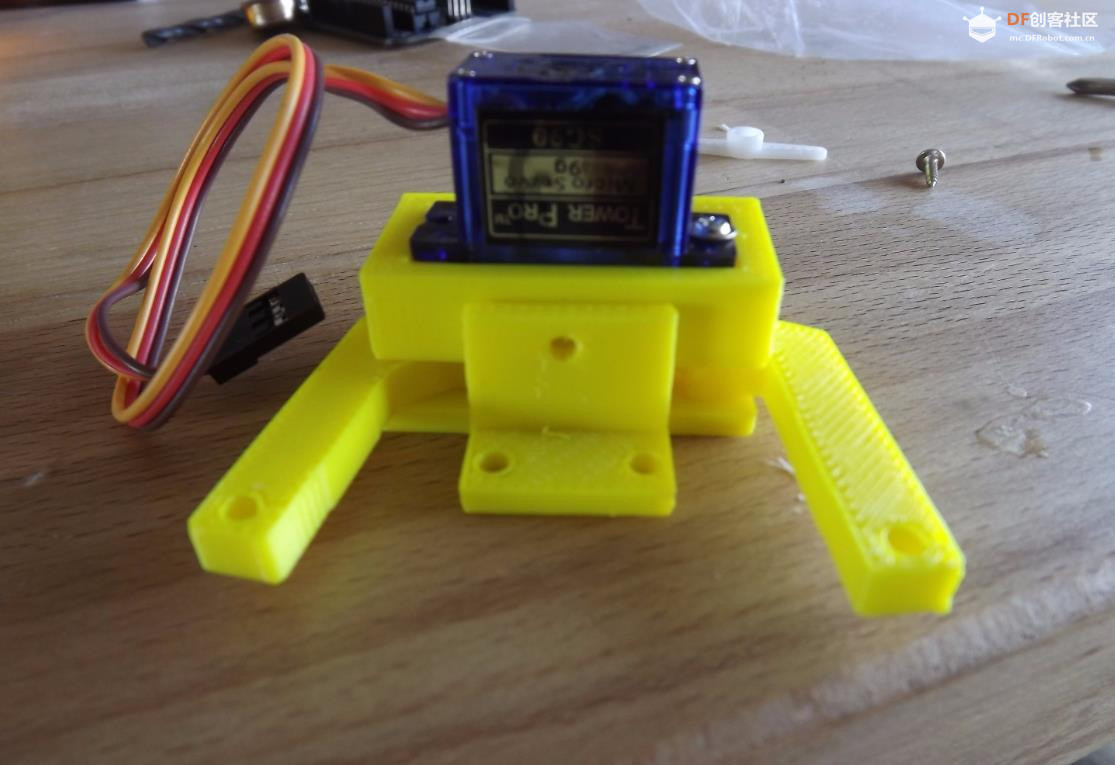
本帖最后由 驴友花雕 于 2025-6-6 17:46 编辑 为什么?因为每个人都需要一个机器人 Claw!本 instructable 将向您展示如何 3D 打印和构建一个简单的机器人爪子,然后将其附加到您的任何 Arduino 项目中。你可以把它放在遥控车上,做一个完整的机器人手臂,或者把它放在一根棍子上,用它来抓东西。  现在在我们开始之前,这个爪子不会特别强大,不要想象你会用它拿起小孩或大杯咖啡。我使用的 Servo 成本约为 2 美元,所以你真的一分钱一分货,但除此之外,它看起来确实很酷,我设法让我的拿起乐高积木、笔和电池。  第 1 步:零件清单 您将需要: 使用 3D 打印机 A 烙铁 项目材料 Arduino UNO(或类似产品) 面包板或 protoshield 电位计 (POT) 跳线 伺服 一些 3 毫米的细丝(或 3 毫米的螺母和螺栓)  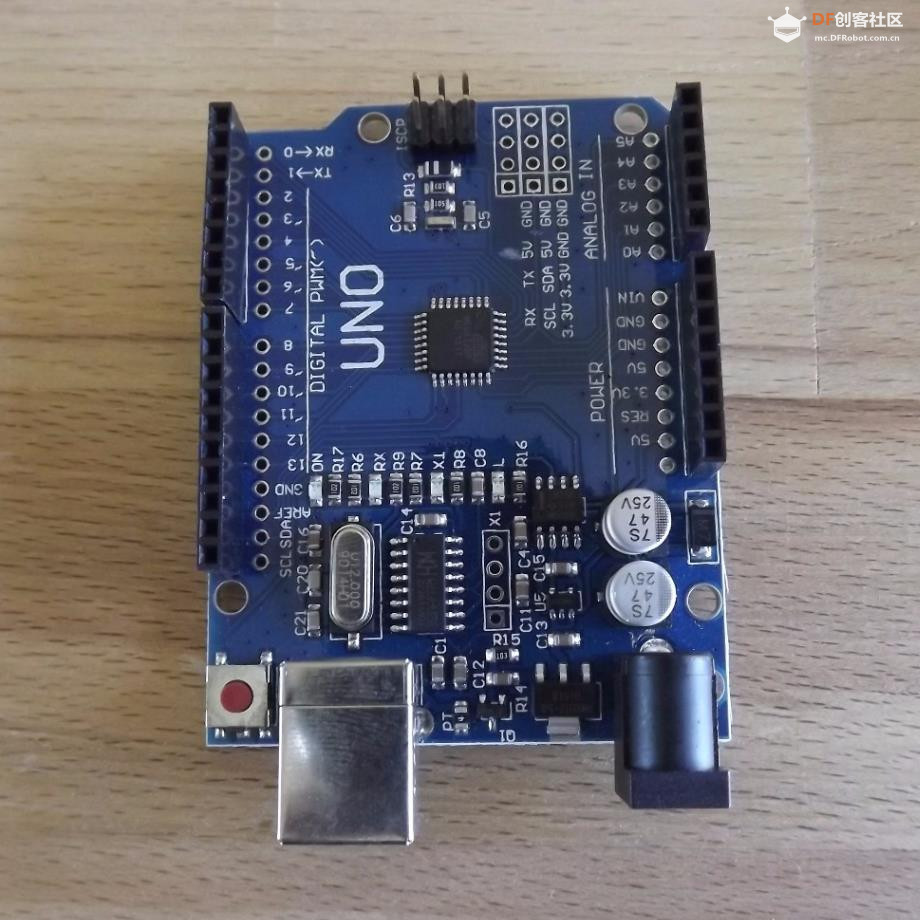 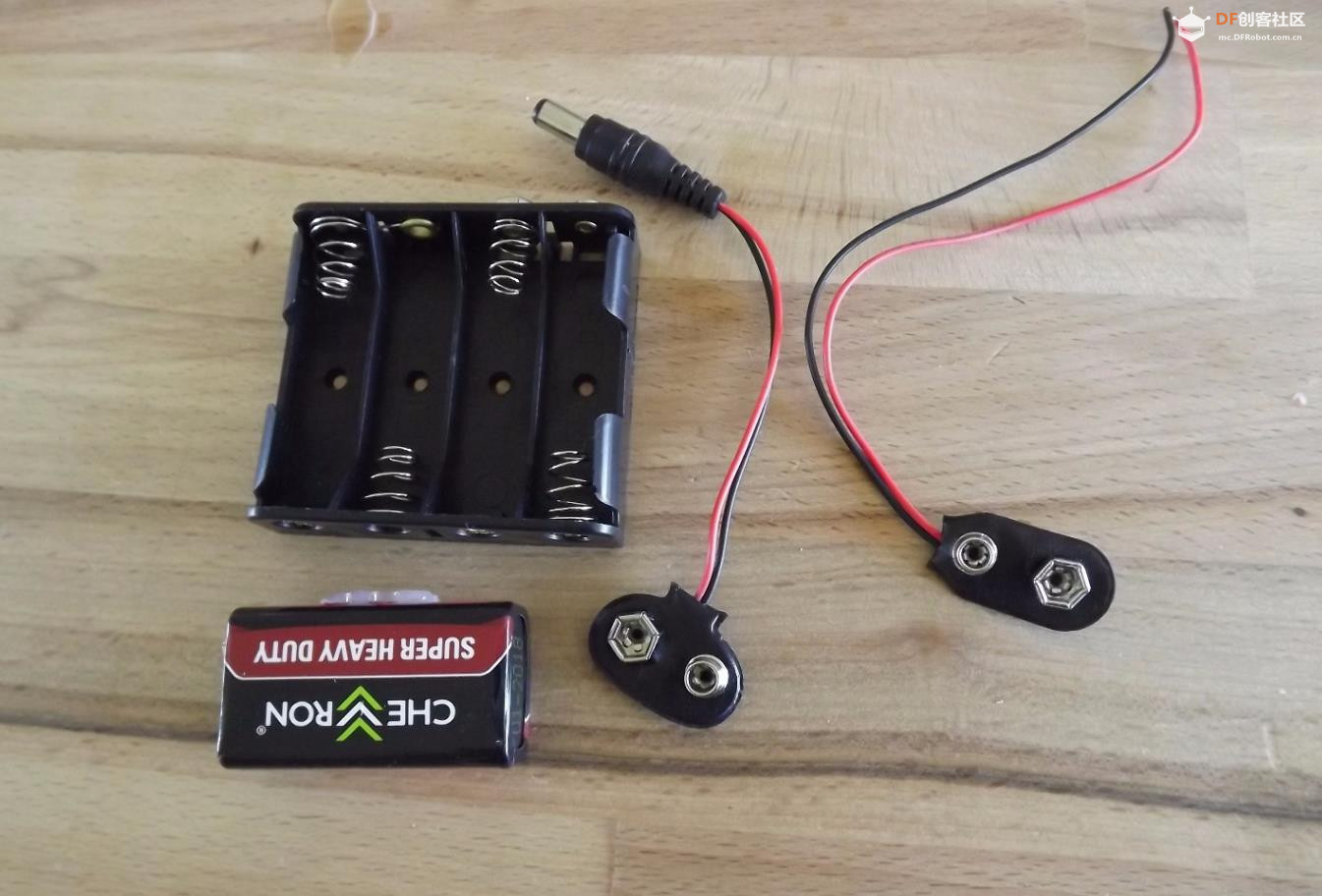  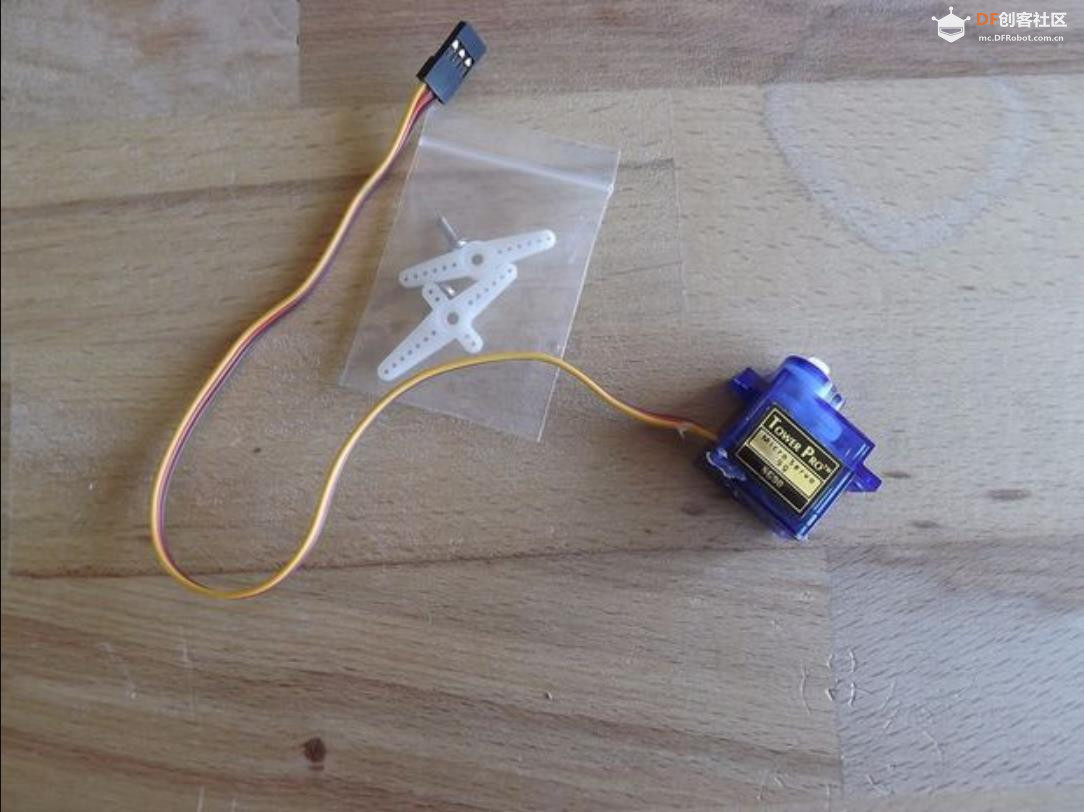  第 2 步:打印你的爪子 使用附带的 .STL 文件并打印出来。我用木筏打印了我的,不需要脚手架或支撑。如果可以的话,您可以无筏打印,在我的 Up!迷你筏子可以很好地剥离,所以除了需要额外的时间外,它没有麻烦。 第二个 .stl 文件用于 POT 上的旋钮,它是可选的。 打印后将碎片拉开,如果您使用木筏打印,我们就可以制作 THE CLAW...... 附件 下载 {{ file.name }}servo_claw_gripper (2).stl下载以 3D 形式查看 下载 {{ file.name }}旋钮 (2).stl下载以 3D 形式查看 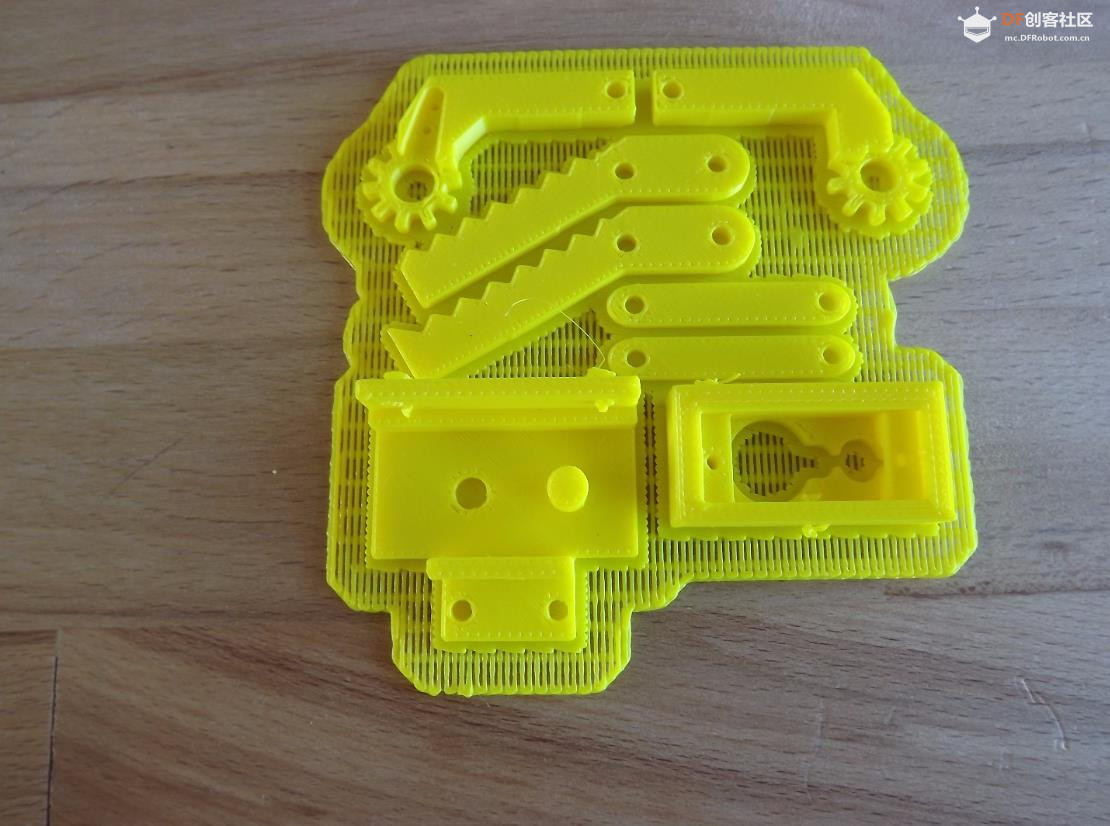 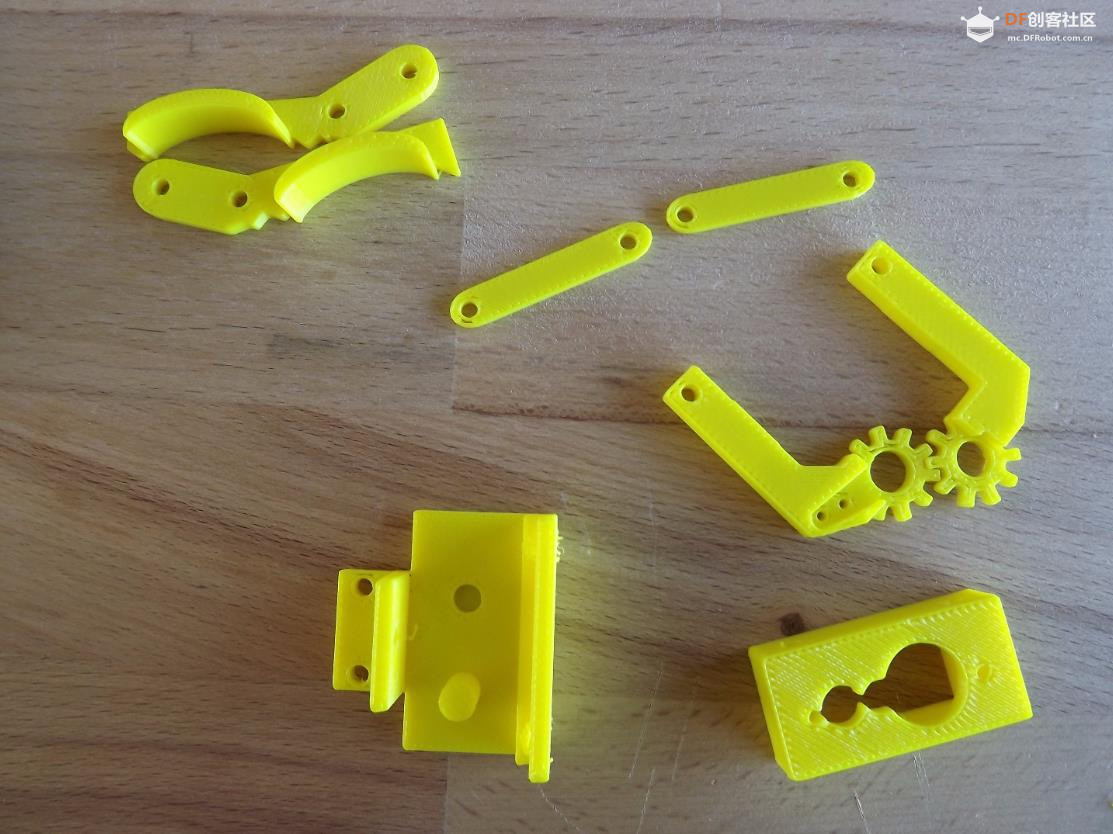 第 3 步:开始组装爪子 看看这些图片,因为它们可以说 1000 个单词,尽管我也在下面描述了步骤。 如图所示,将盖子放在 Servo 上 使用提供的螺钉之一,将伺服器拧入盖子中。如果您有多余的螺丝,请随时放入 2. 取带有伺服臂缩进的爪臂。将其放在伺服齿轮上,然后将 Servo 的单臂放在凹痕中。它应该很合身。 将臂推入 Cog,使其能够抓住来回移动伺服器,并确保它抓握良好。看第 4 张图,您的伺服器应该在这一点上完全展开。如果它想继续前进,那么拉下手臂并进行调整,这样就是终点。 现在将臂向后稍微缠绕(如图所示)并拧入伺服包随附的小螺钉以固定臂。 如第 5 张图所示,将第 2 个臂固定到位,它应该与第一个臂位于相同的相对位置。 拿起顶板并将其推入到位,注意第 2 个臂下方的盖子上有一个孔。顶板的杆穿过这里,应该卡入到位。 使用剩余的螺丝将两侧拧在一起。有 3 个匹配的螺丝孔,但您的套件中可能只剩下一个螺丝,它会用一个螺丝固定在一起,将其放入前孔中。 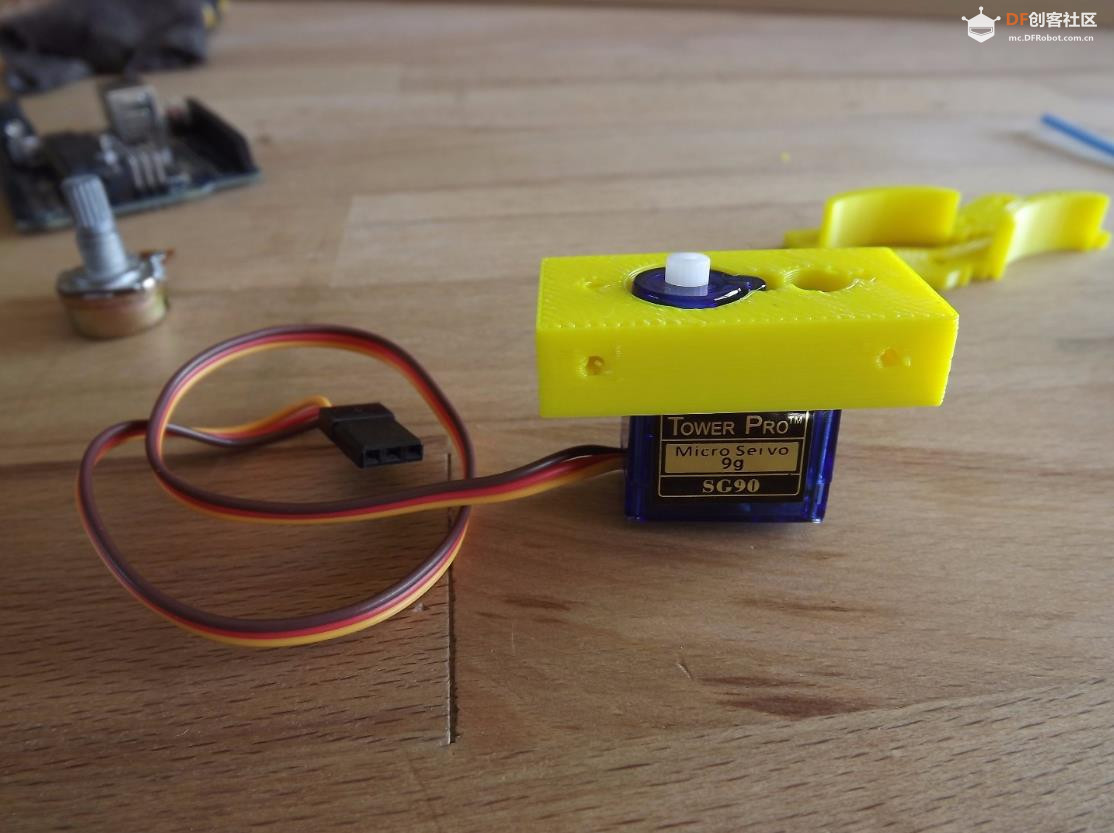 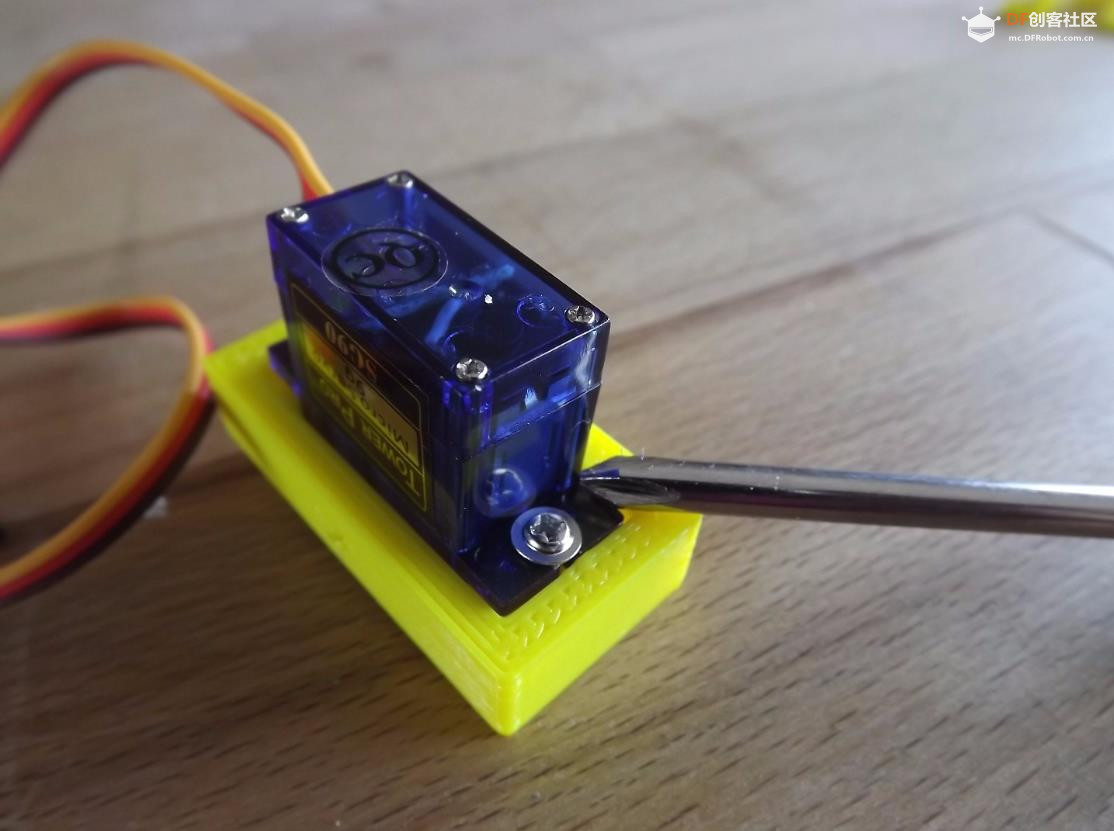  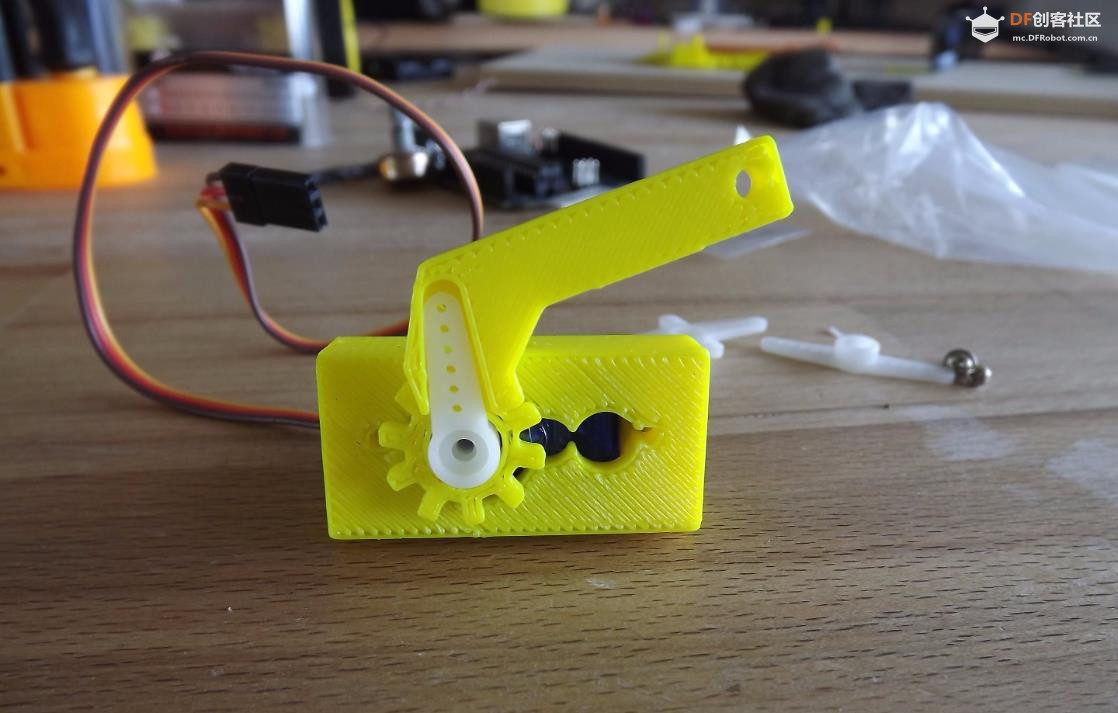 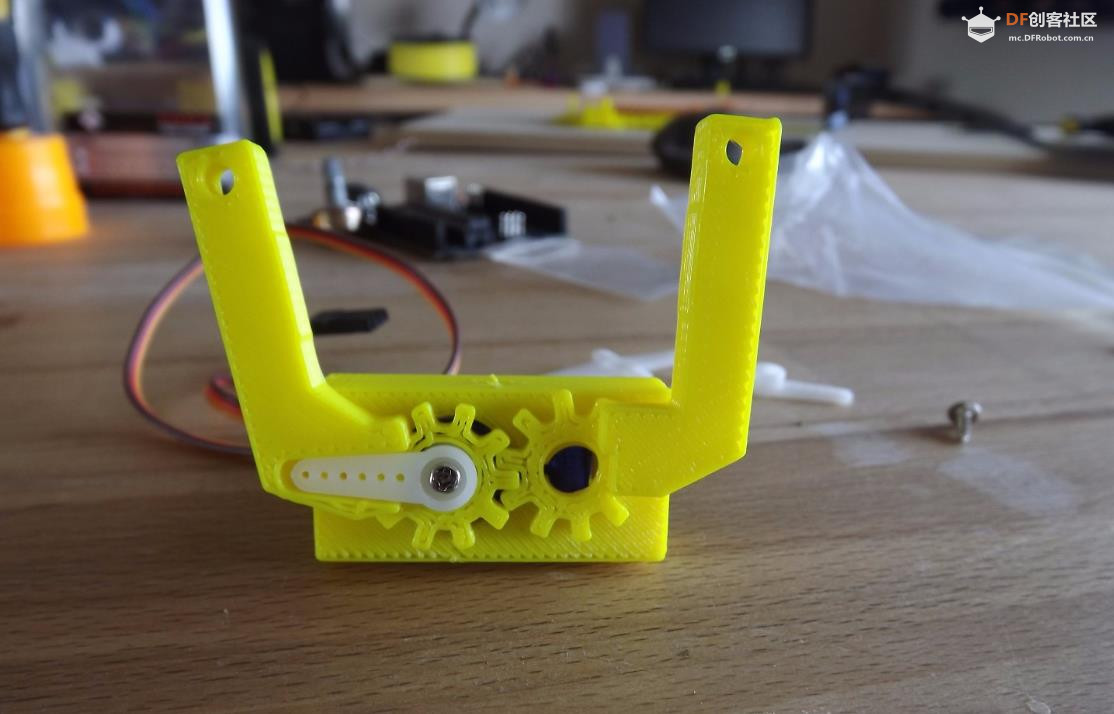 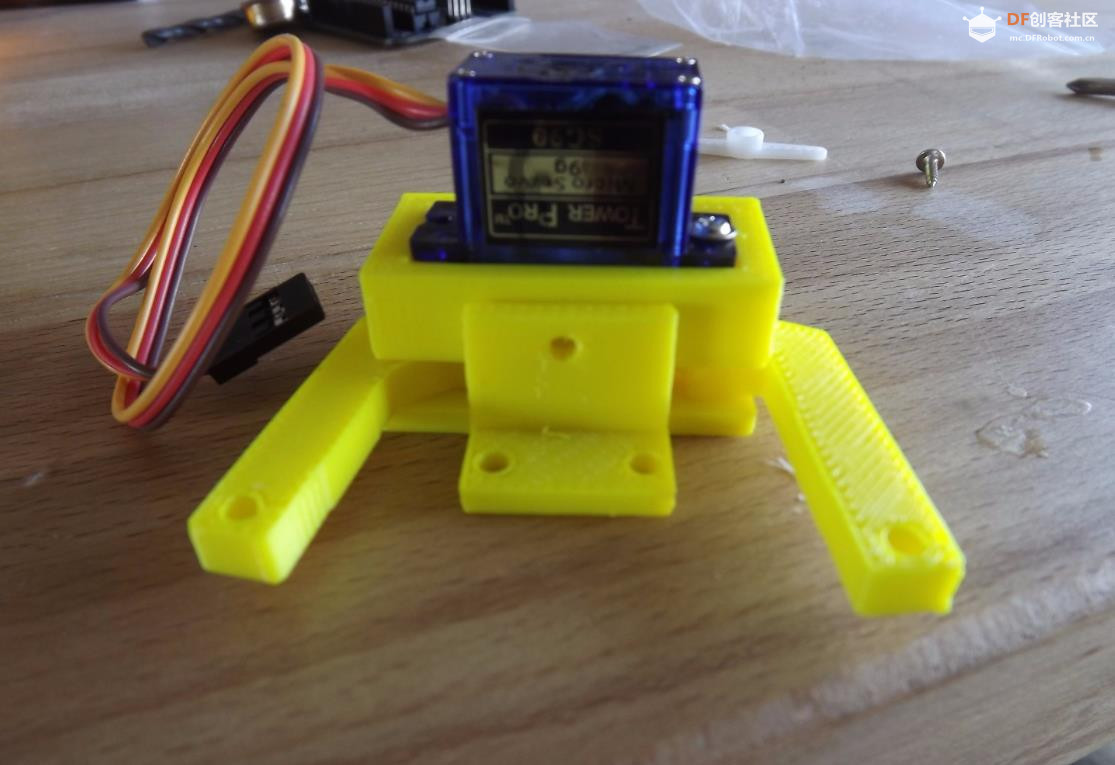 第 4 步:将其放在一起 剪下 6 短片细丝,它们应该长约 8 毫米。 将细丝推入所有孔中。如果您正在努力通过这些,您可能需要找到一个 3 毫米的钻头并轻轻地钻出孔。您实际上可以用手而不是使用钻头来更好地做到这一点。 如图所示安装 2 个支撑 如图所示连接爪子。 使用烙铁(低温)轻轻熔化并压扁灯丝两侧的末端,以免它们脱落。(或者如果你正在使用螺母,请连接它们)。如果你没有烙铁,你可以用热刀或类似的东西熔化它们。 您现在应该有一个可以工作的爪子。前后移动爪子,确保它平稳移动,您可以听到伺服器中的齿轮工作。 如果伺服器不旋转,则您可能没有将臂连接到伺服齿轮上。只要你的爪子有全范围的打开和关闭,它应该可以工作。  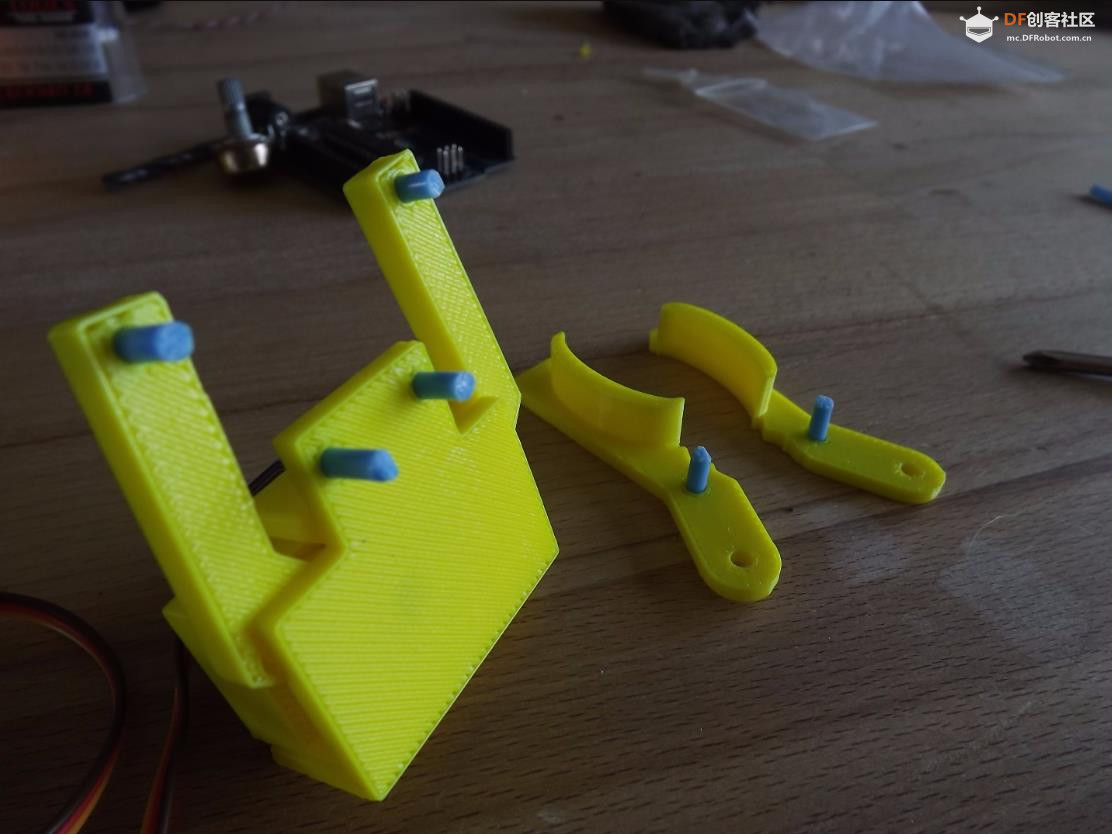 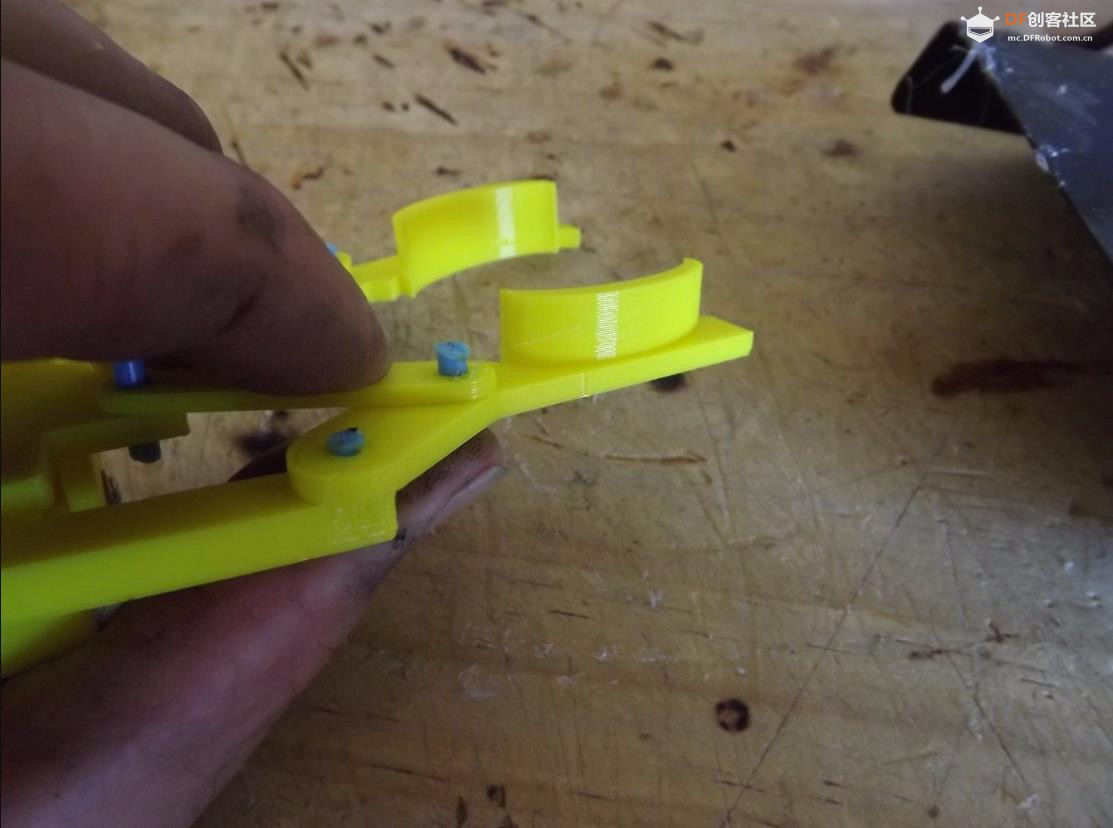 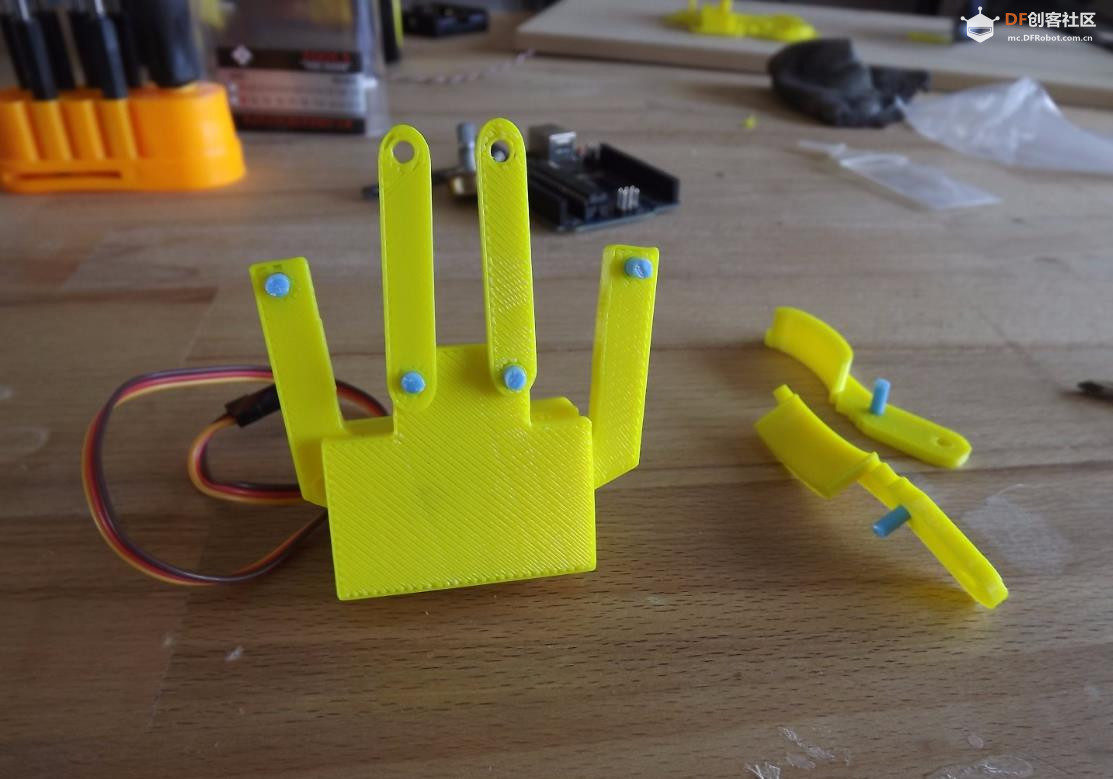 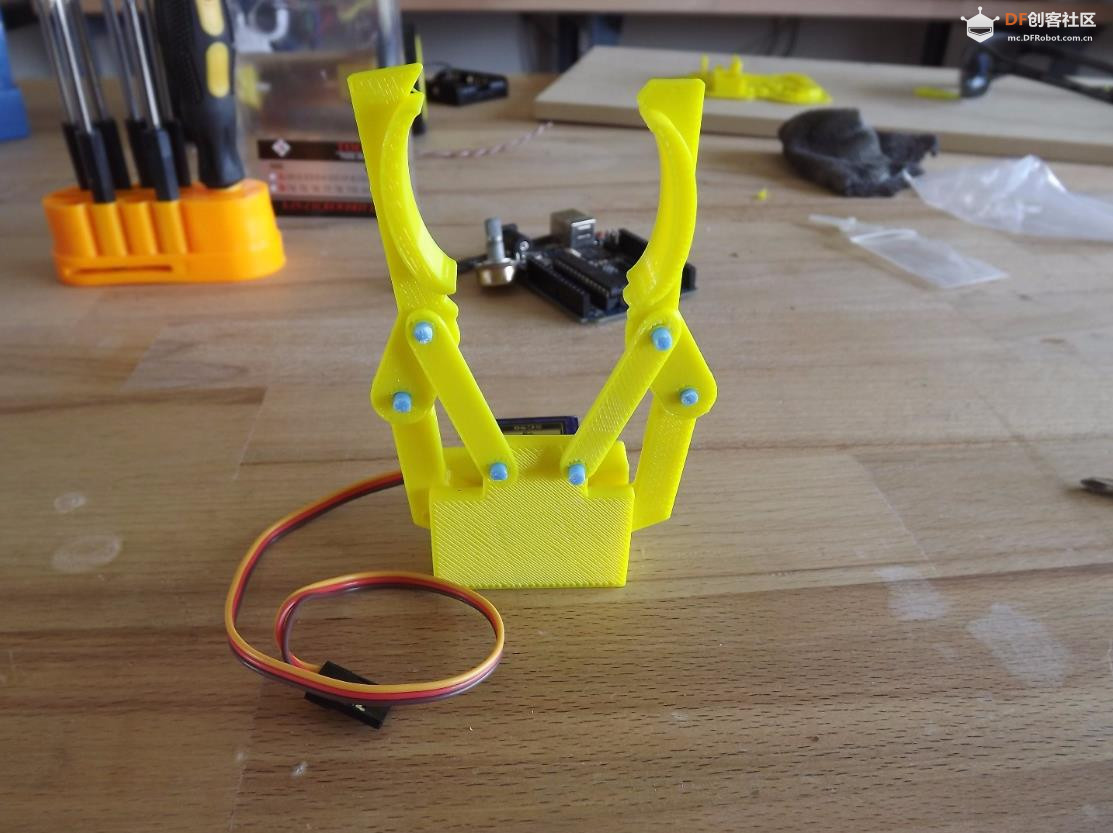 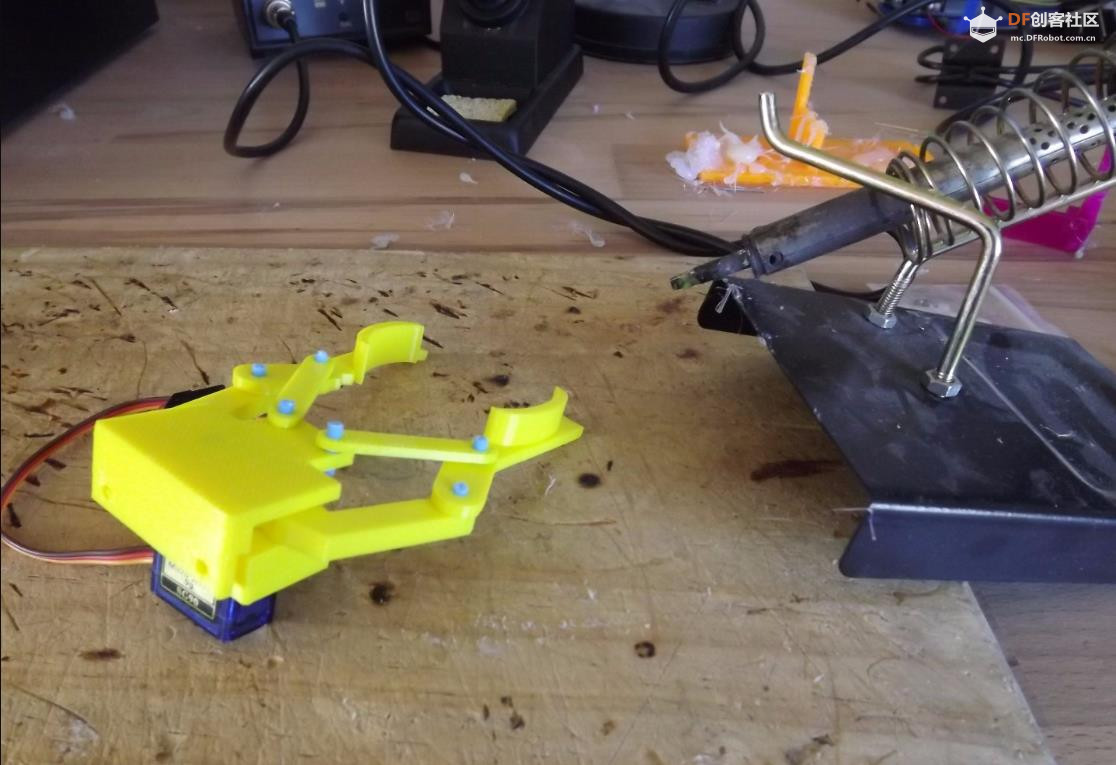 第 5 步:项目接线 如图所示,将 3 根电线焊接到它上面。我发现出来的公引线不太适合杜邦线。但只要对你有用...... 暂时不要用电池 在试验板中,将电池的红色和黑色电线分别连接到电源轨 +ve 和 -ve 行 重要提示:使用另一根电线将 Arduino 上的 GND 连接到试验板上的 -ve 将 Servo 上的红线和棕线分别连接到 +ve 和 -ve 导轨。 将舵机上的黄线连接到 Arduino 上的 12 引脚 将电位器的红线和黑线(外线)分别连接到 Arduino 5V 和 GND。 将中间线连接到 Arduino 上的引脚 A0。 就是这样,我们已经准备好编写代码了。请参阅上面的 fritzing 图。 附件 下载 {{ file.name }}爪.fzz下载 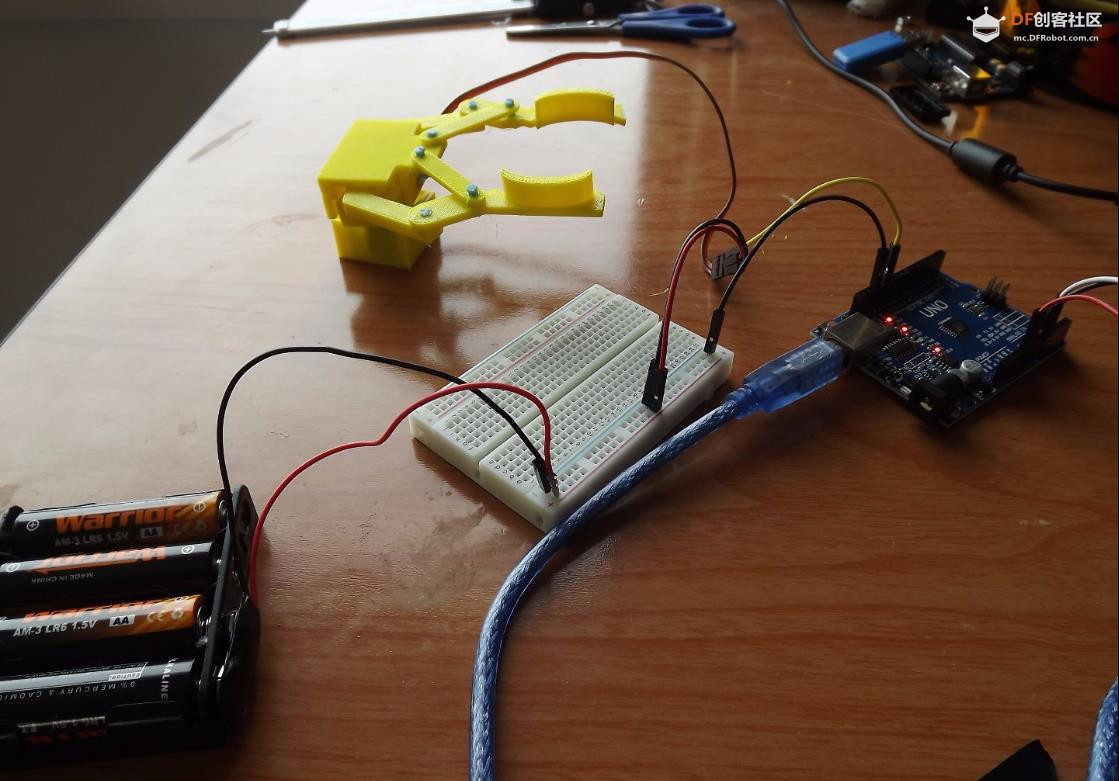  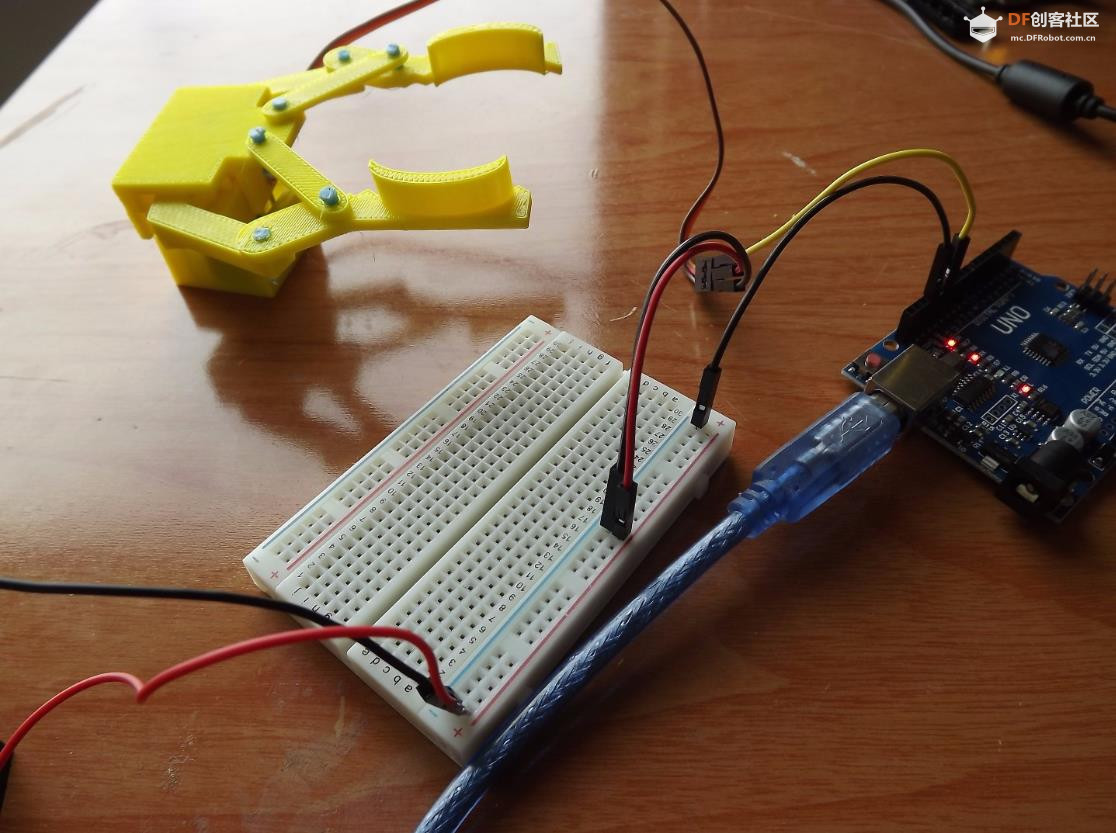 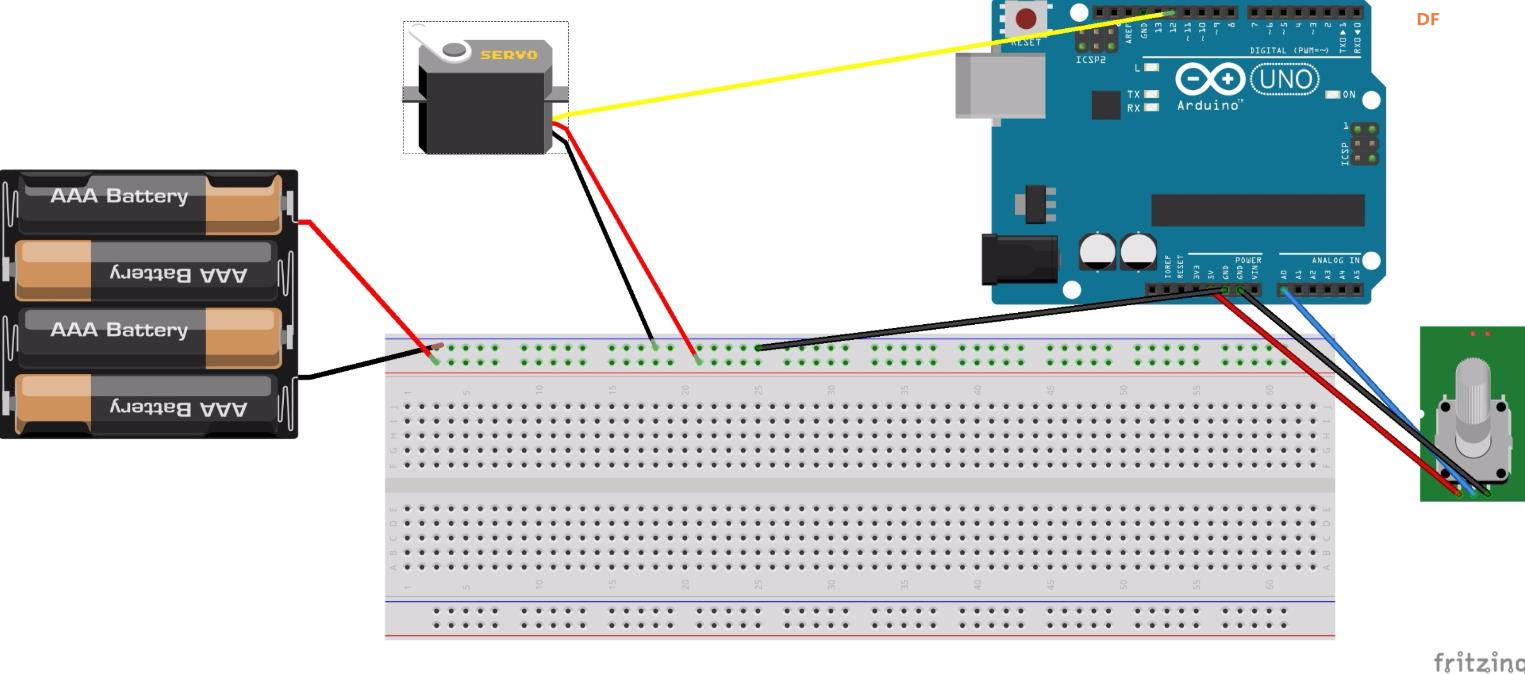 第 6 步:项目编码 项目开源代码 将 Arduino 插入 PC 并上传代码。如果您不知道如何作,Arduino.cc 网站上提供了大量信息。 上传后,打开串行监视器并将波特率设置为 9600。 你的爪子应该打开和关闭几次,然后你可以用 POT 控制它。 如果您希望将其与 PC 断开连接并继续使用它,那么您可以从面包板上的电源轨上取一根电线并将其插入 Arduino 上的 VIN,这应该会提供足够的电力来运行 Arduino 进行此演示,但是如果您使用电池组做很多其他事情,您可能需要提供更好的电源来防止它低于5 伏特。 享受! 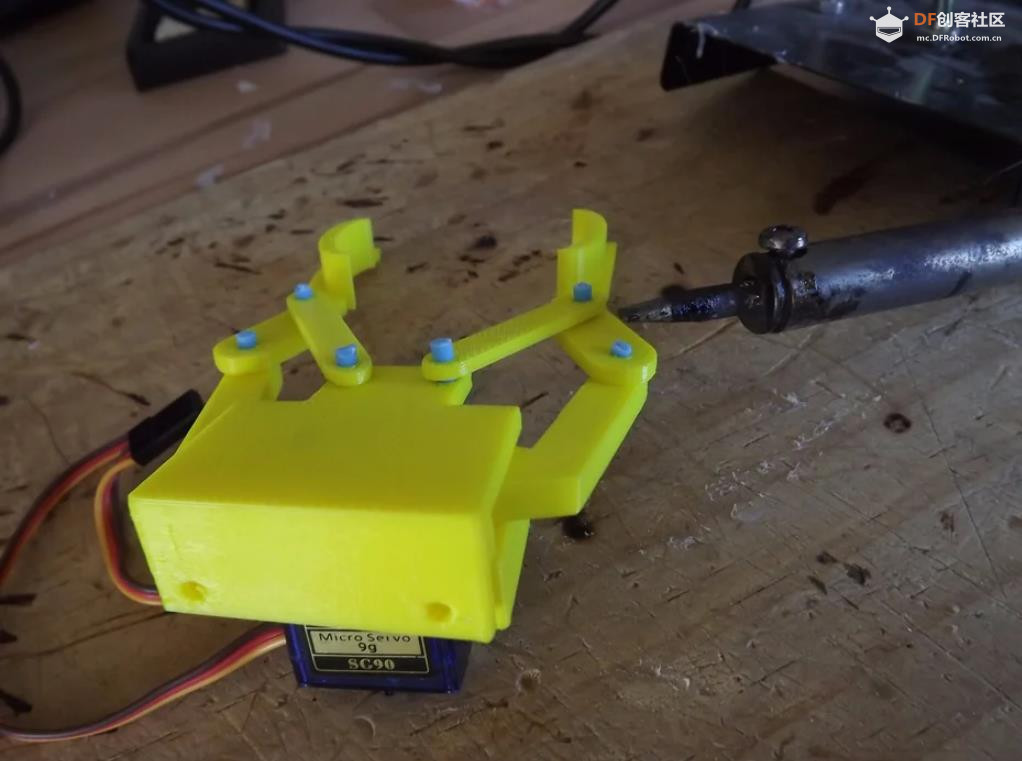 第 7 步:其他想法... 将爪子放在机器人汽车上,并使用超声波传感器触发它打开/关闭 将爪子放在棍子上,添加一个按钮来打开/关闭 多买几个 Servos 并制作一个机械臂。 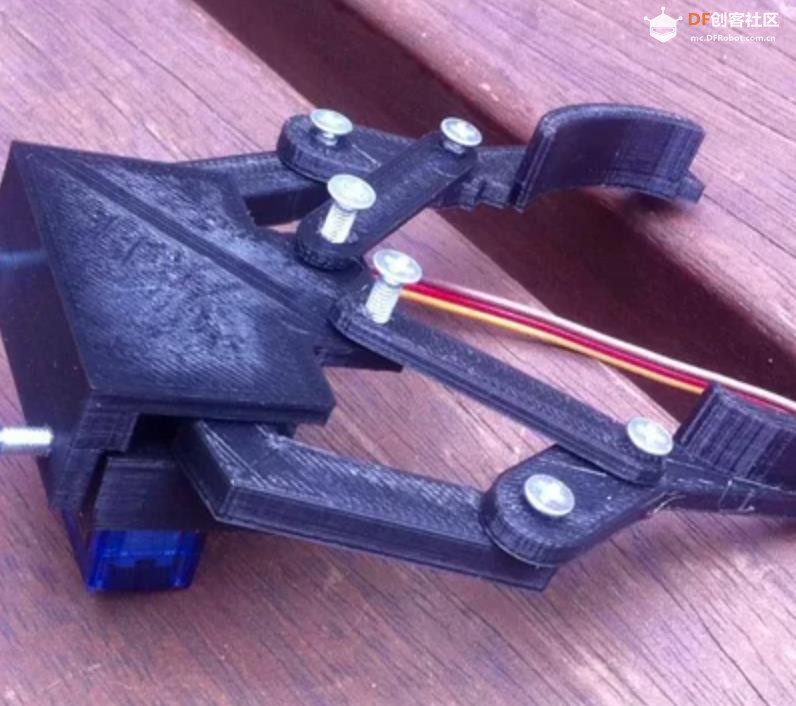 【Arduino 动手做】The Claw:3D 打印的机器人爪子 项目链接:https://www.instructables.com/The-Claw-A-3D-printed-robotic-claw/ 项目作者:MakerLabnz 项目视频:https://www.youtube.com/watch?v=P8ozeDzIaz0  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






