|
3215| 22
|
[项目] 【 Arduino 动手做】 激光竖琴 |
|
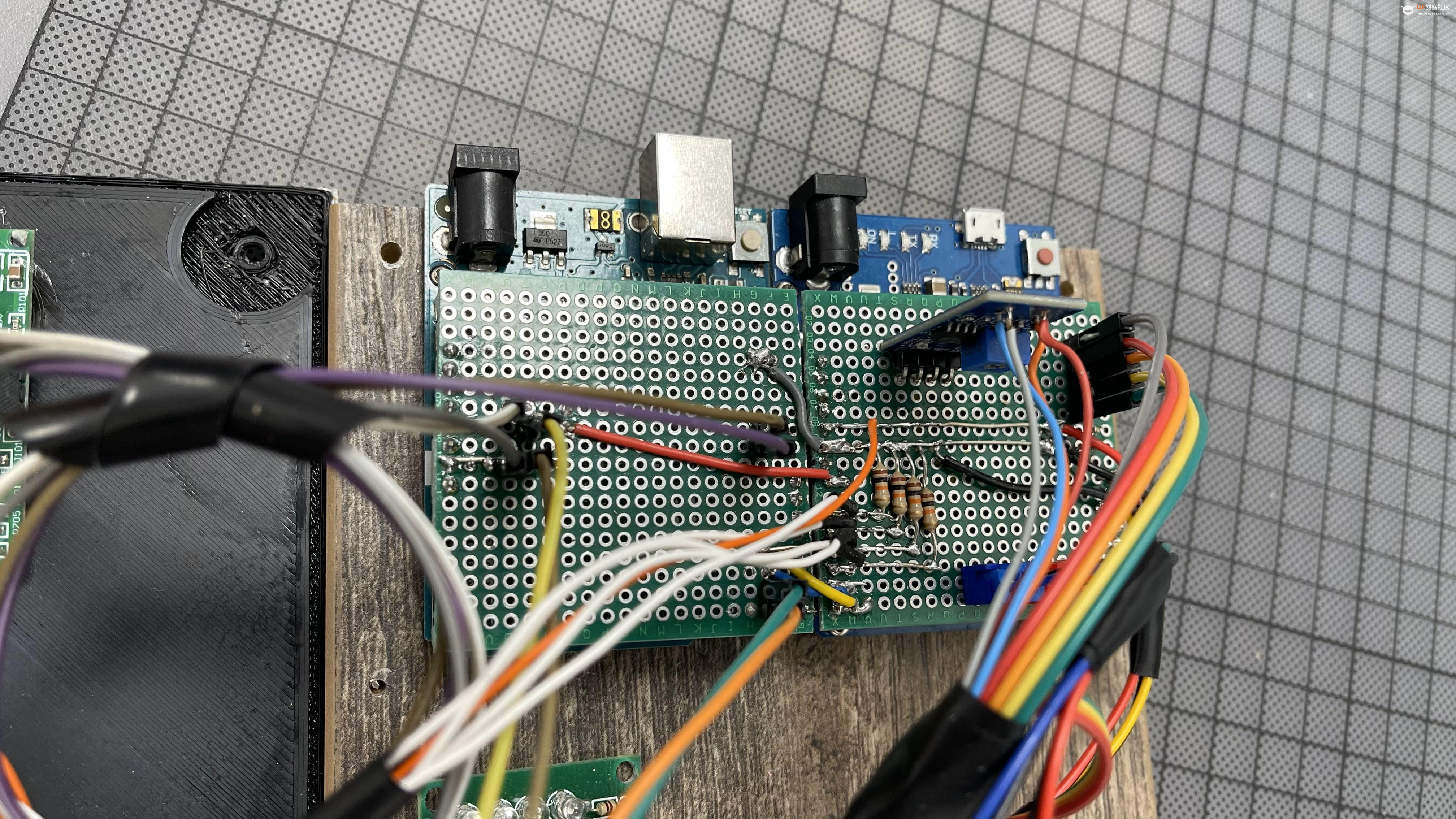
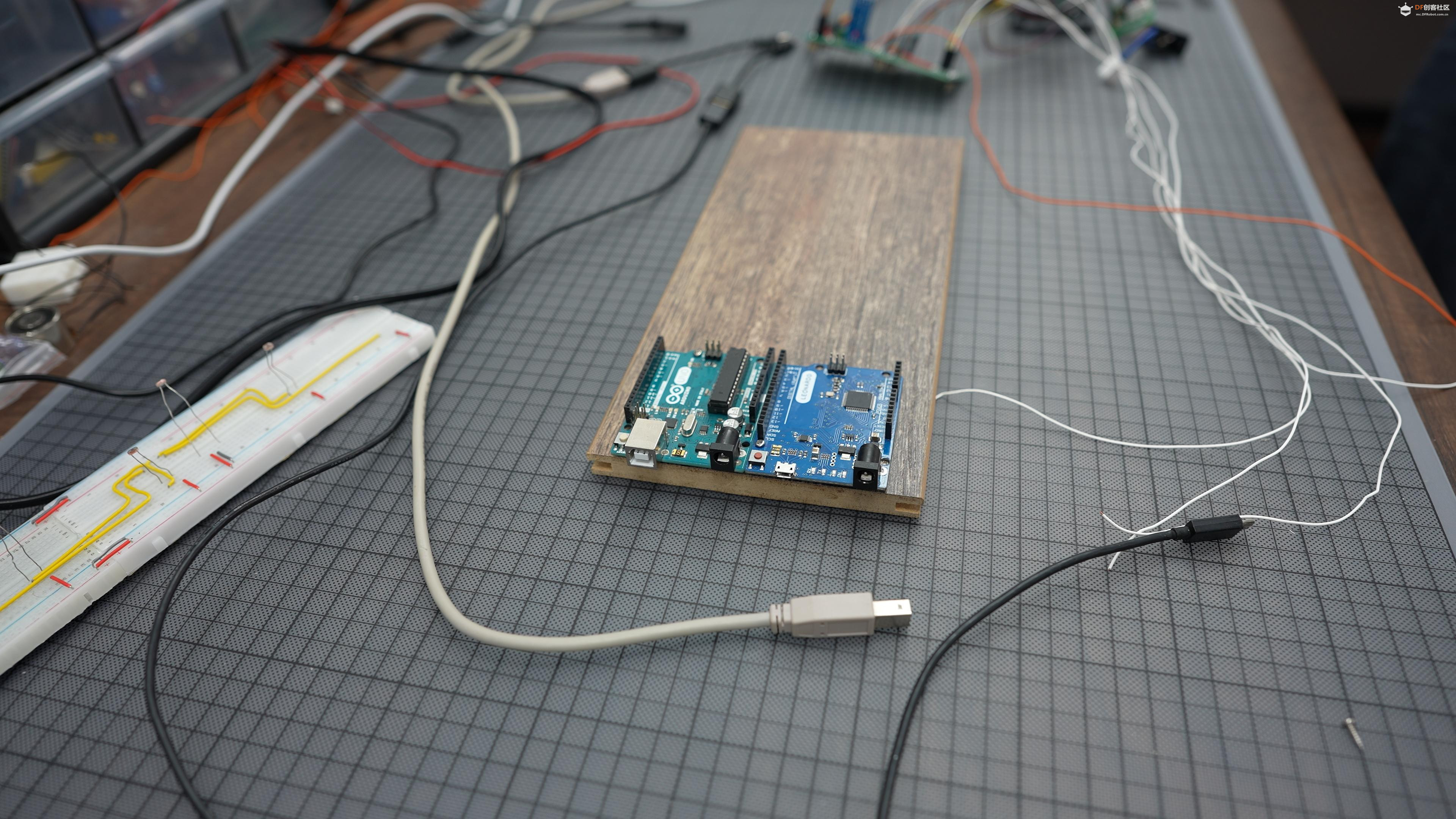
第 16 步:将代码上传到 Arduino 您可以在此存储库中找到这两个 Arduino 的代码。 每当您需要更新 Arduino UNO(控制激光器和电机)的代码时, 我建议遵循这个例程: 关闭 12v 电源。 断开 Arduino Leonardo 与计算机的连接。 将 Arduino 代码上传到 Arduino Uno。 上传后断开 Arduino Uno 与计算机的连接。 打开 12v 电源。 将 Arduino Leonardo 重新连接到计算机。 每当您需要更新 Arduino Leonardo(控制超声波传感器并生成 MIDI 音符)的代码时,您可以在 harp 运行时上传新代码,而不会注意到任何中断,因为 Arduino UNO 同时处理电机和激光器。 |
|
经过 3 个月的反复试验、调整电机、微调激光器并克服了不少挫折,我终于让它工作起来了。让我告诉你——这太不可思议了! 在本指南中,我将向您介绍我如何从头开始构建自己的无框激光竖琴。它类似于传奇人物让-米歇尔·雅尔 (Jean-Michel Jarre) 使用的标志性激光竖琴。我仍然记得小时候在电视上看它,问我爸爸它是如何运作的——建造一个是我毕生的梦想。 它完全由 Arduino 控制,并使用电机扫描激光束,并搭配巧妙的传感器设置来检测光束中断。通过执行这些步骤,您可以创建一个功能齐全的激光竖琴,它不仅看起来令人难以置信,而且可以播放真实的音乐。 观看视频以了解其背后的概念,并了解我是如何构建它的。 ⚠️ 重要安全警告 ⚠️ 在这个项目中,我使用了一台强大的 3W 激光器。如果处理不当,这种类型的激光会导致严重和永久性的眼睛或皮肤损伤。永远不要低估危险 - 即使是短暂的暴露或间接反射也可能导致永久性的眼睛损伤。 在开始使用强大的激光器之前,我强烈建议您先熟悉低功率激光器,例如 5mW 激光指示器,以安全地学习激光器处理基础知识、对准和安全协议。全面了解激光分类、护目镜、光束反射风险和安全作程序。 网上有很多关于激光安全的资源: https://makezine.com/article/dig ... ecting-your-vision/ https://ehs.mit.edu/wp-content/uploads/Laser_Safety_Guide.pdf 舒适后,小心地使用更强大的激光,始终确保您使用专门针对您的激光波长的认证激光安全护目镜。在受控环境中工作,尽量减少反射表面,清楚地标记激光器的路径,并在进行调整或不积极实验时始终关闭激光器。 这种激光竖琴特别危险,因为激光束向上指向您的眼睛,大大增加了意外暴露的危险。 激光可以帮助创建像这款激光竖琴这样的惊人项目,但前提是要负责任地处理。安全第一,创意先行! 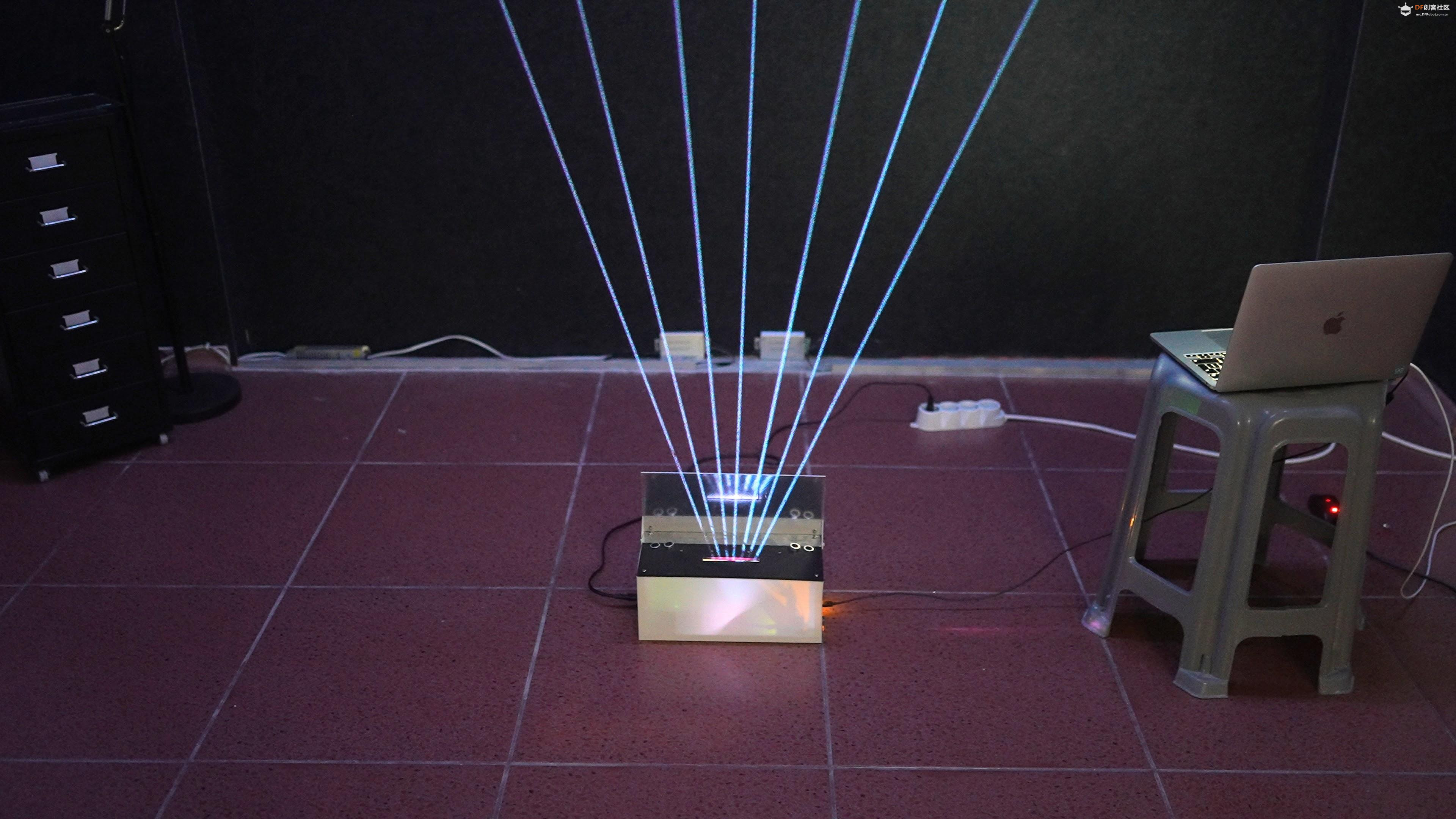 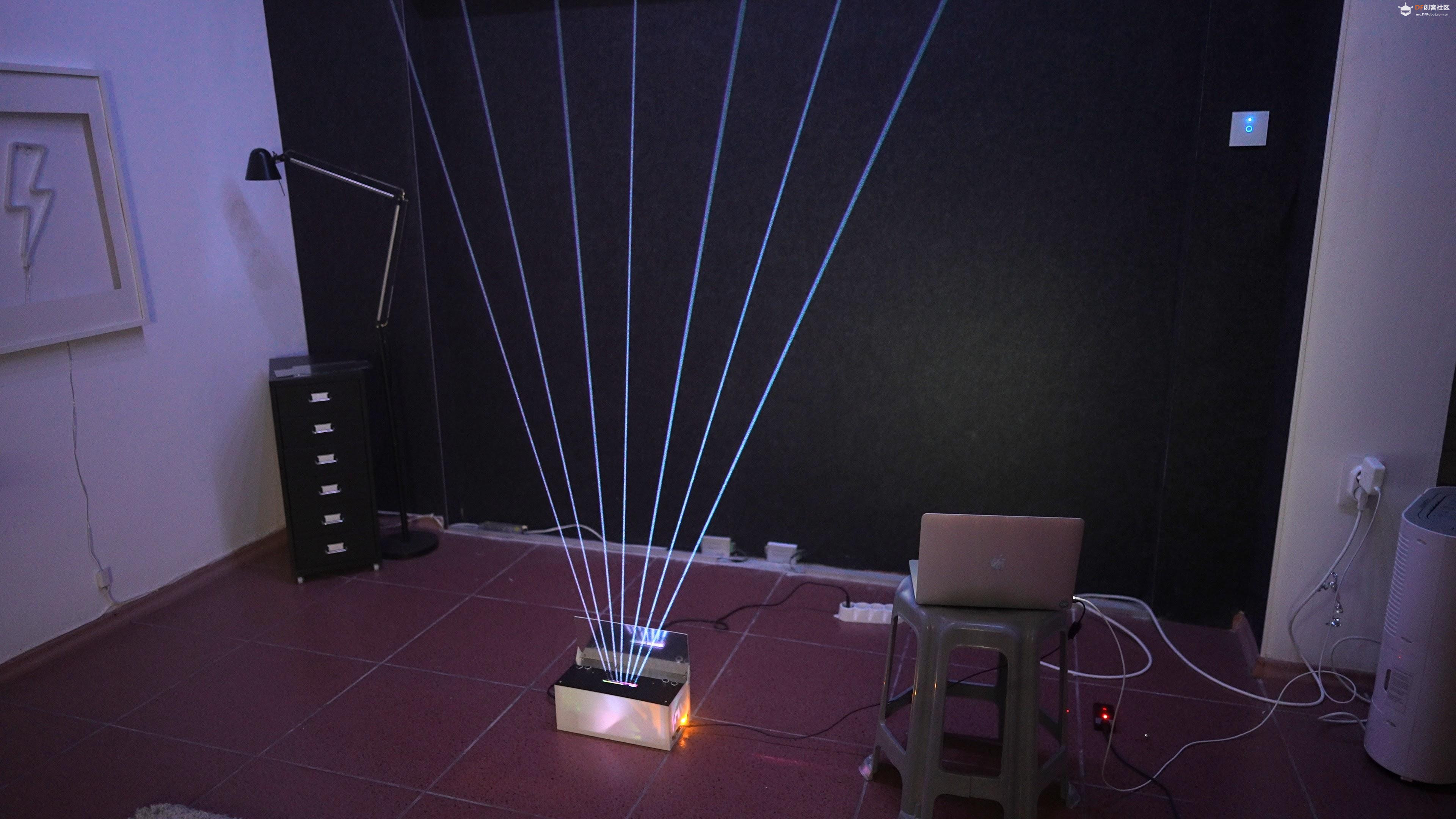   |
|
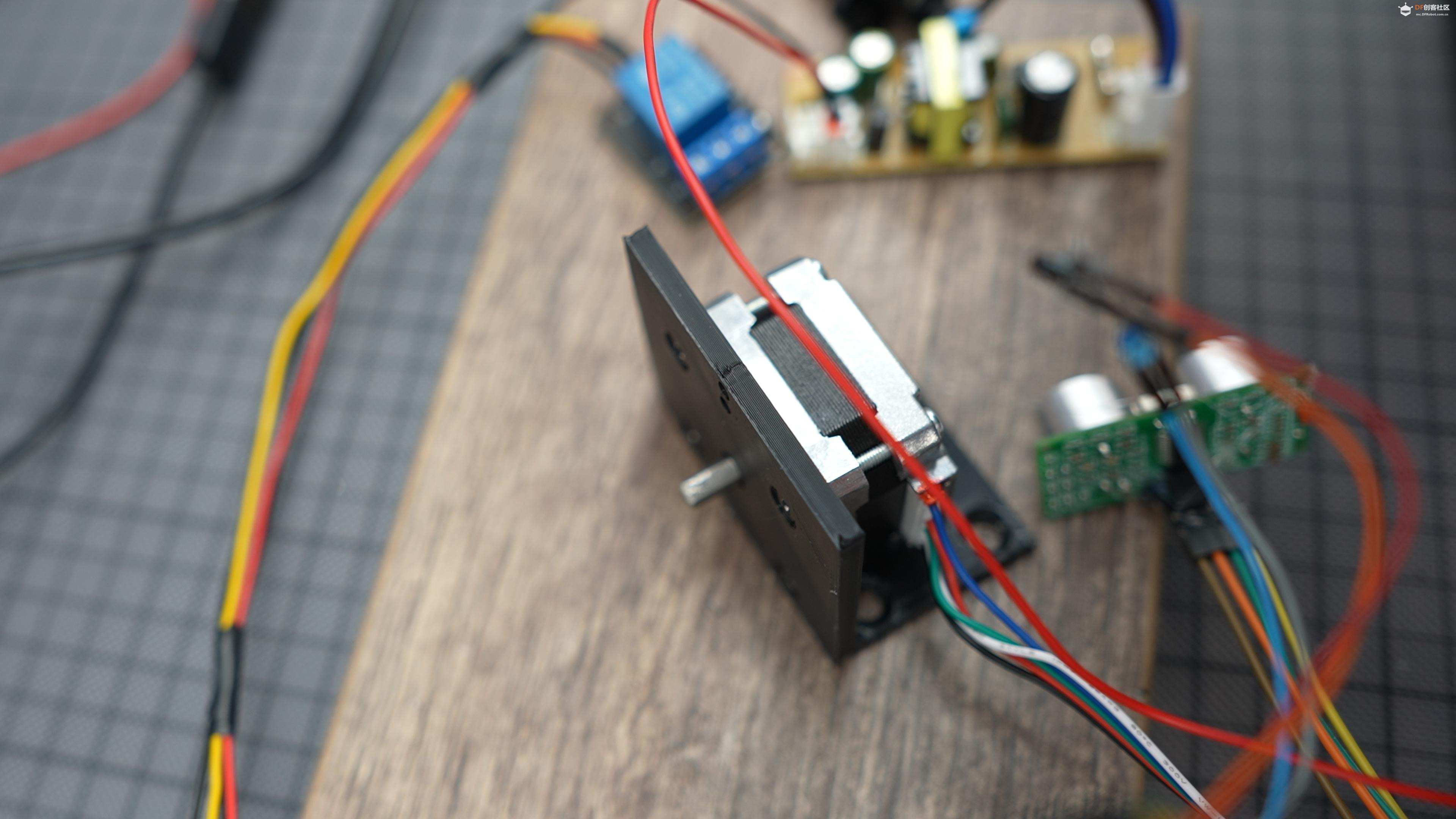
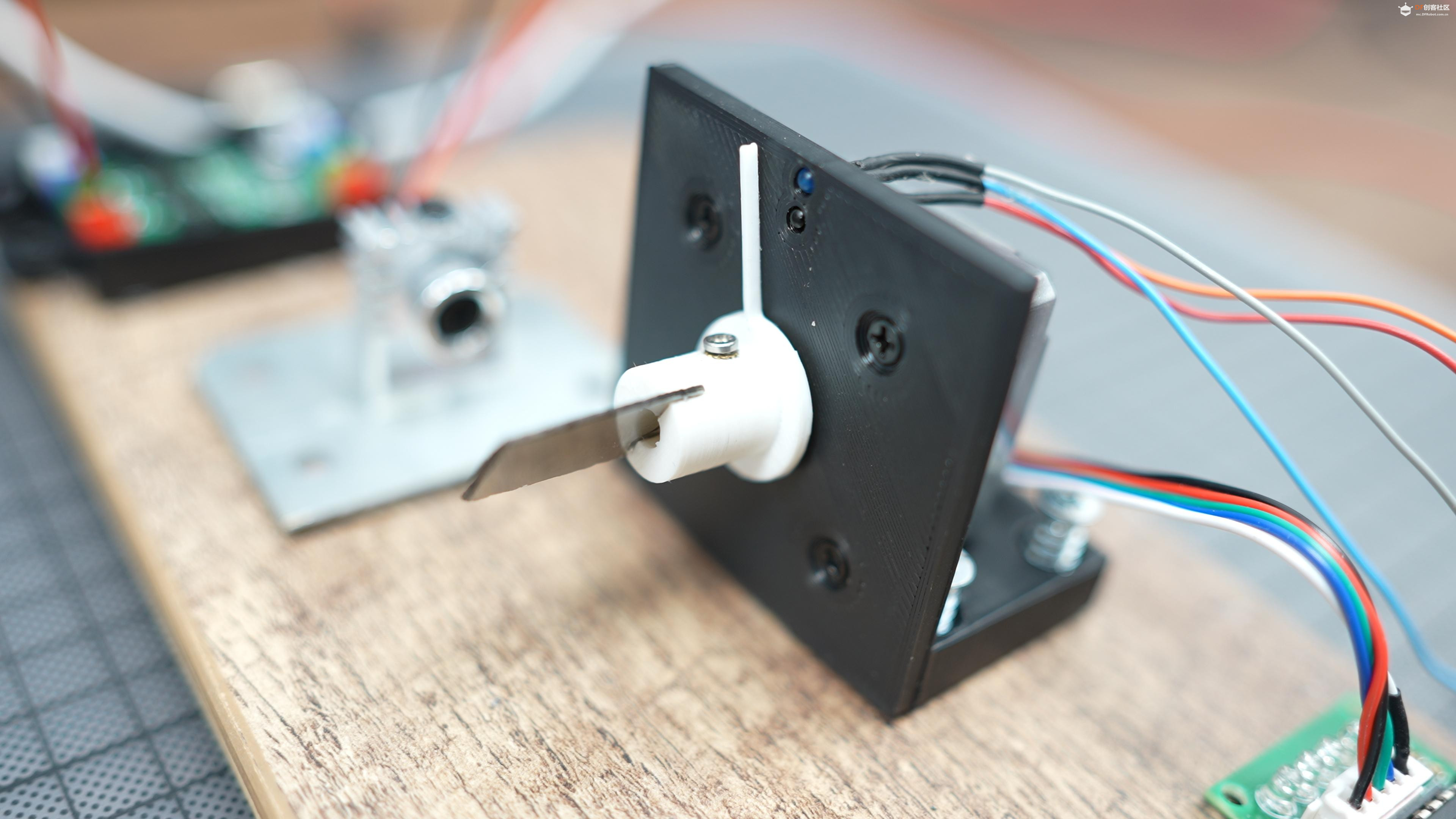
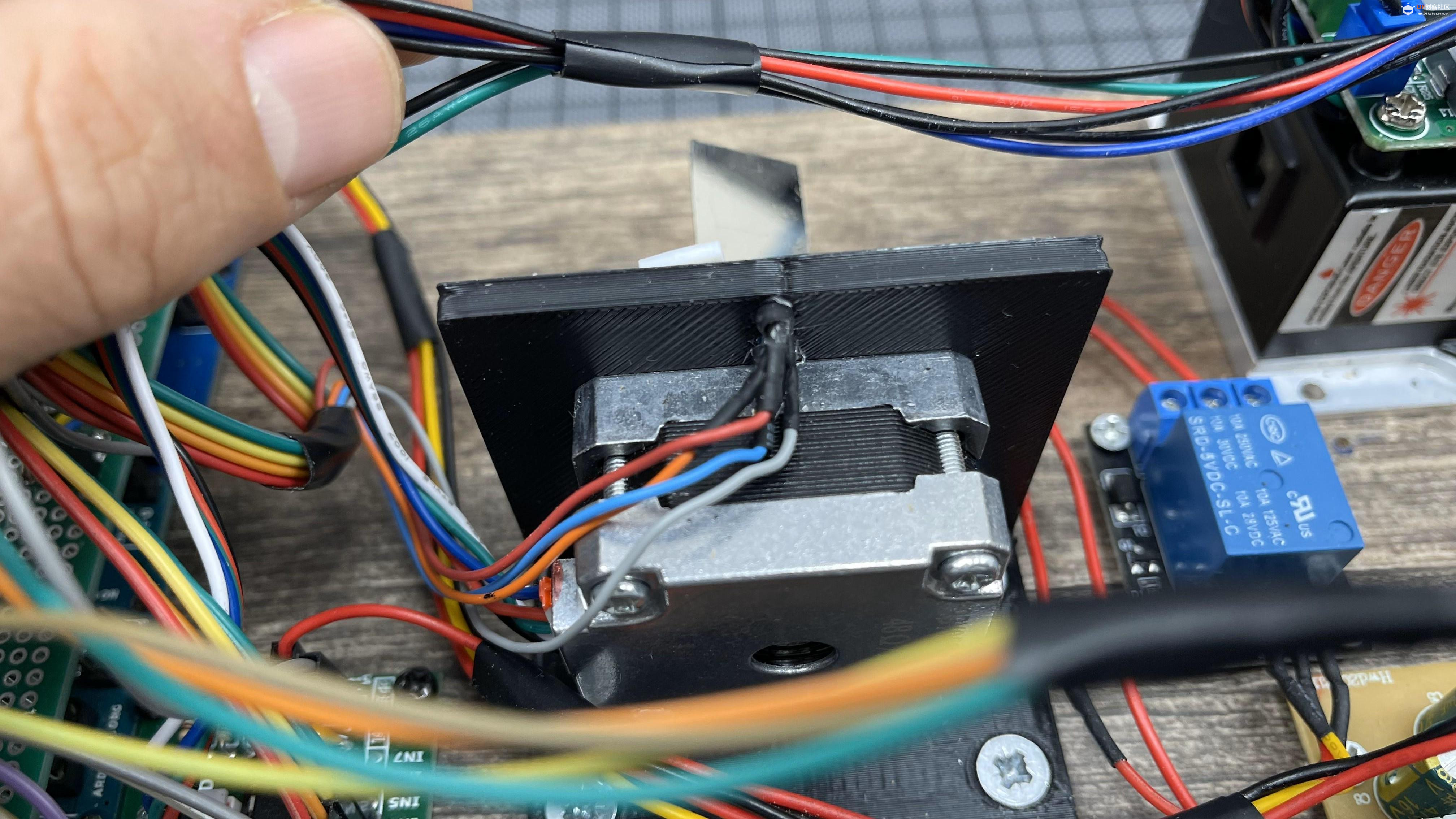
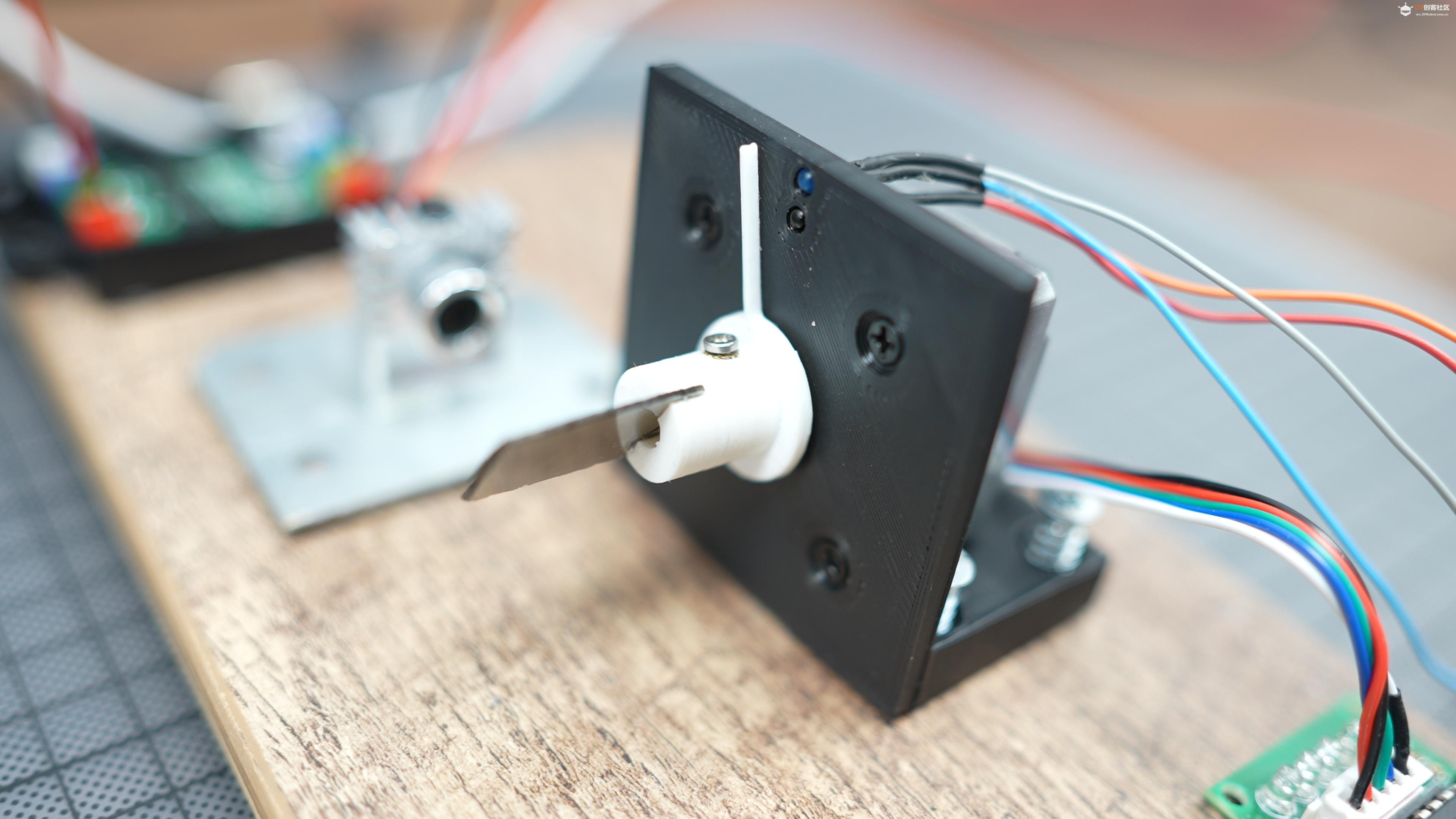
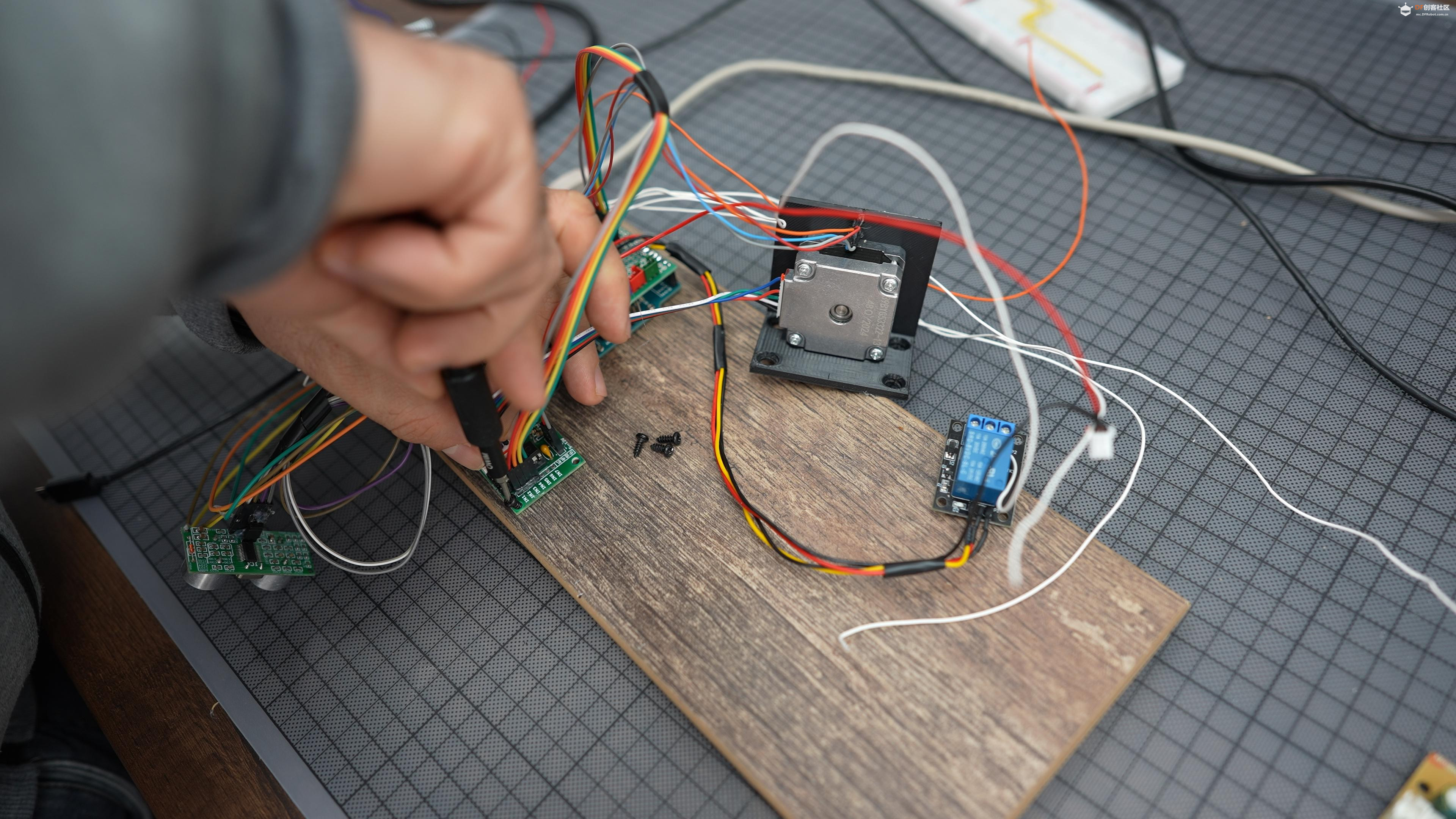
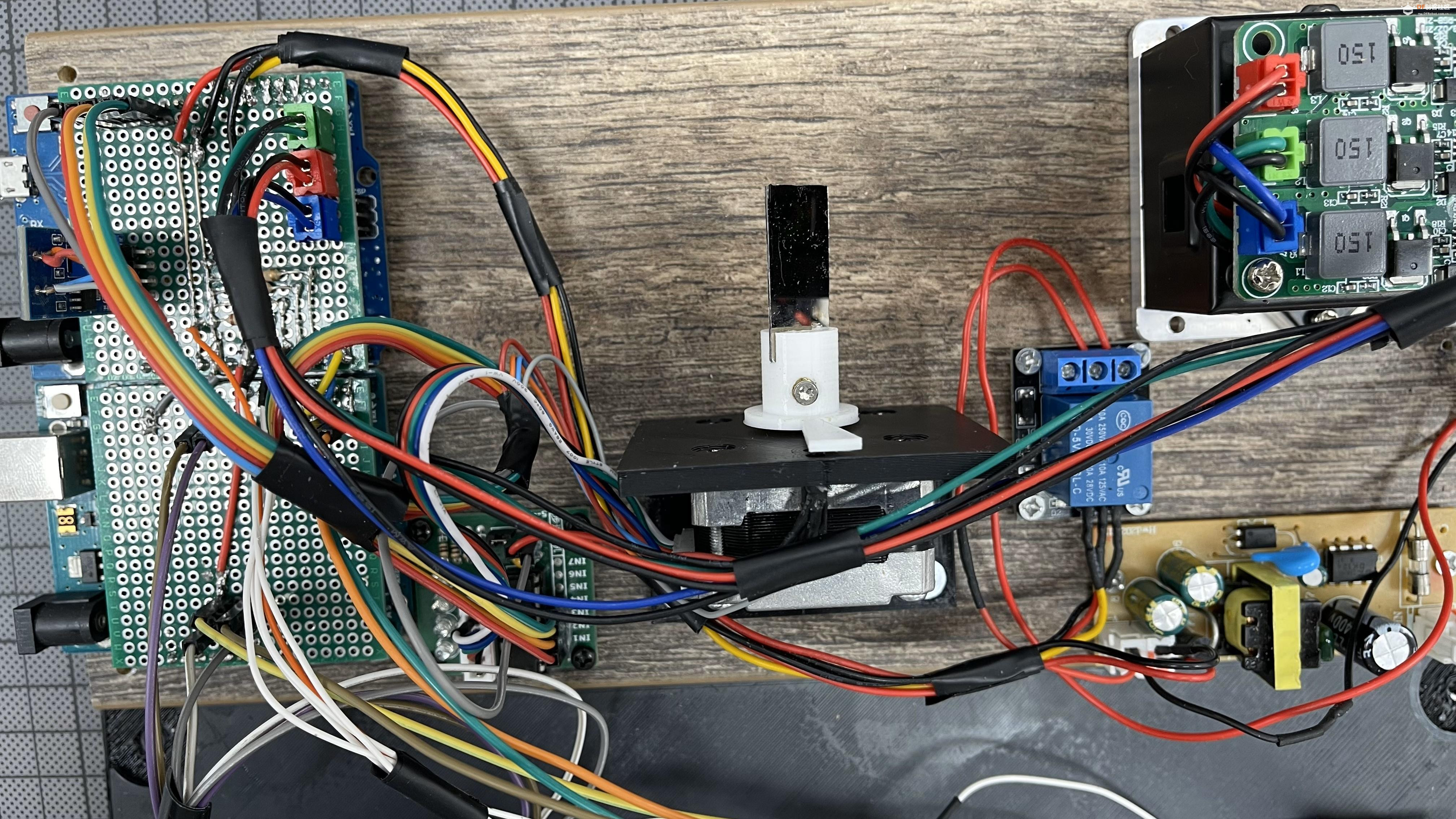
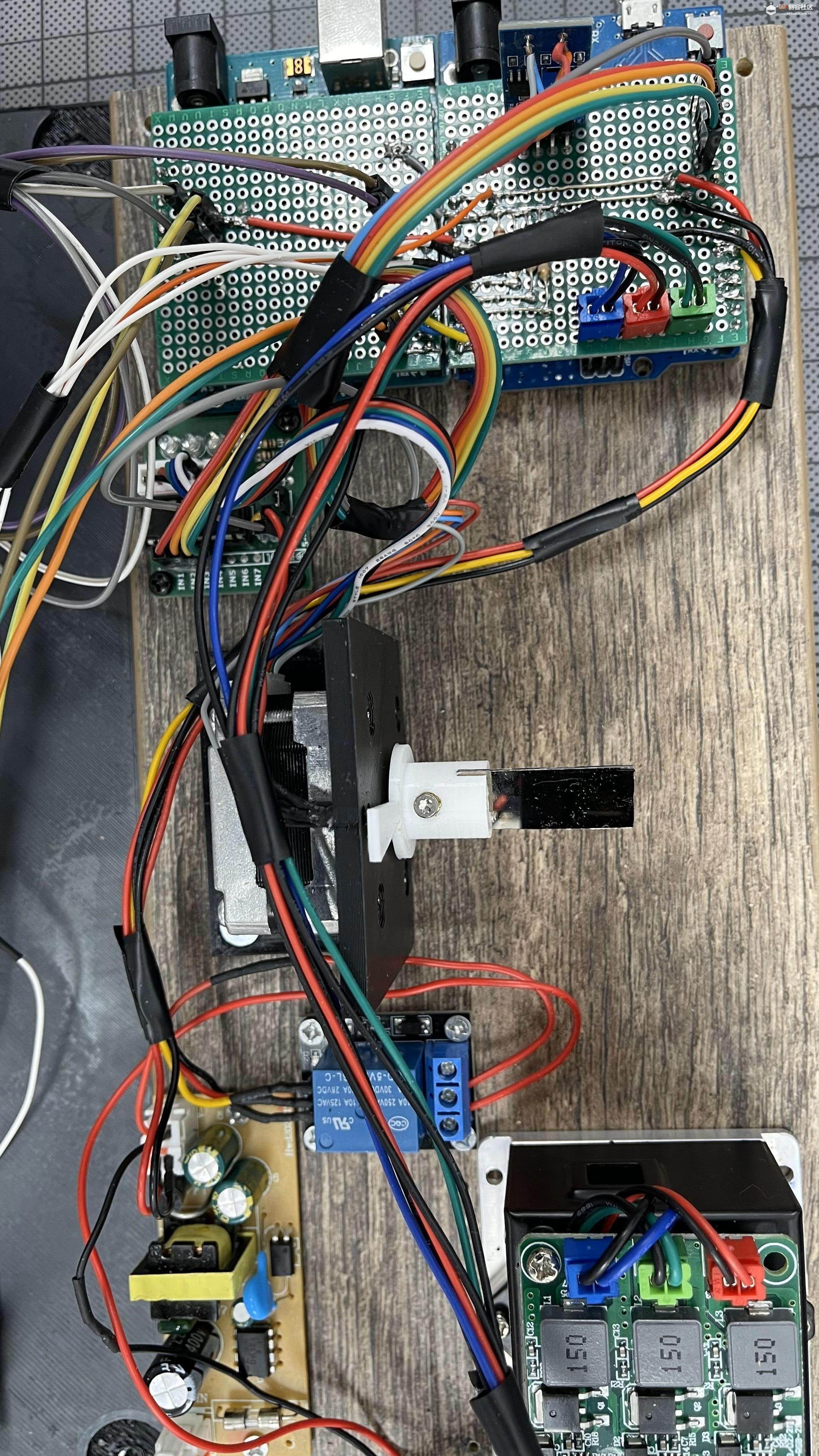
第 3 步:学习控制步进电机 如果您已经有信心控制步进电机,请继续跳过此步骤。 *** 步进电机是竖琴的第二大重要部件,仅次于激光器,但事实证明,要做好它是最具挑战性的。因为有这么多不同类型的步进电机可用,所以每一种都需要自己独特的设置和控制方法。 最受欢迎的类型是:单极、双极和混合步进电机。根据电机的类型,它们需要不同的驱动器(控制它们的硬件单元)和编程。 DroneBot Workshop 上有一个很好的介绍视频,它可能会为您提供足够的背景知识来使用步进电机。我找到的另一个关于布线的有用视频是这个。 *** 电机要求为 1.8° 步距角(即每转 200 步)和紧凑的尺寸,以保持较低的重量,这有助于在两个方向上快速、精确地运动。 在我的视频中,您可以看到我使用了两种类型的电机和两种不同的驱动器。 NEMA 17 (42SHDC3025-24B) 与 A4988 驱动器结合使用。 NEMA 16 (39BYG53322) 步进电机与 ULN2003 驱动器配对。(这是更好的选择,因为转子更轻、更短,可以实现更快、更灵敏的运动。 我最终坚持使用混合动力 NEMA 16 (39BYG53322),不幸的是它非常不受欢迎。但是,正如我所说,尺寸比电机的类型更重要,因此可以使用任何其他类型的 NEMA 16。 |
|
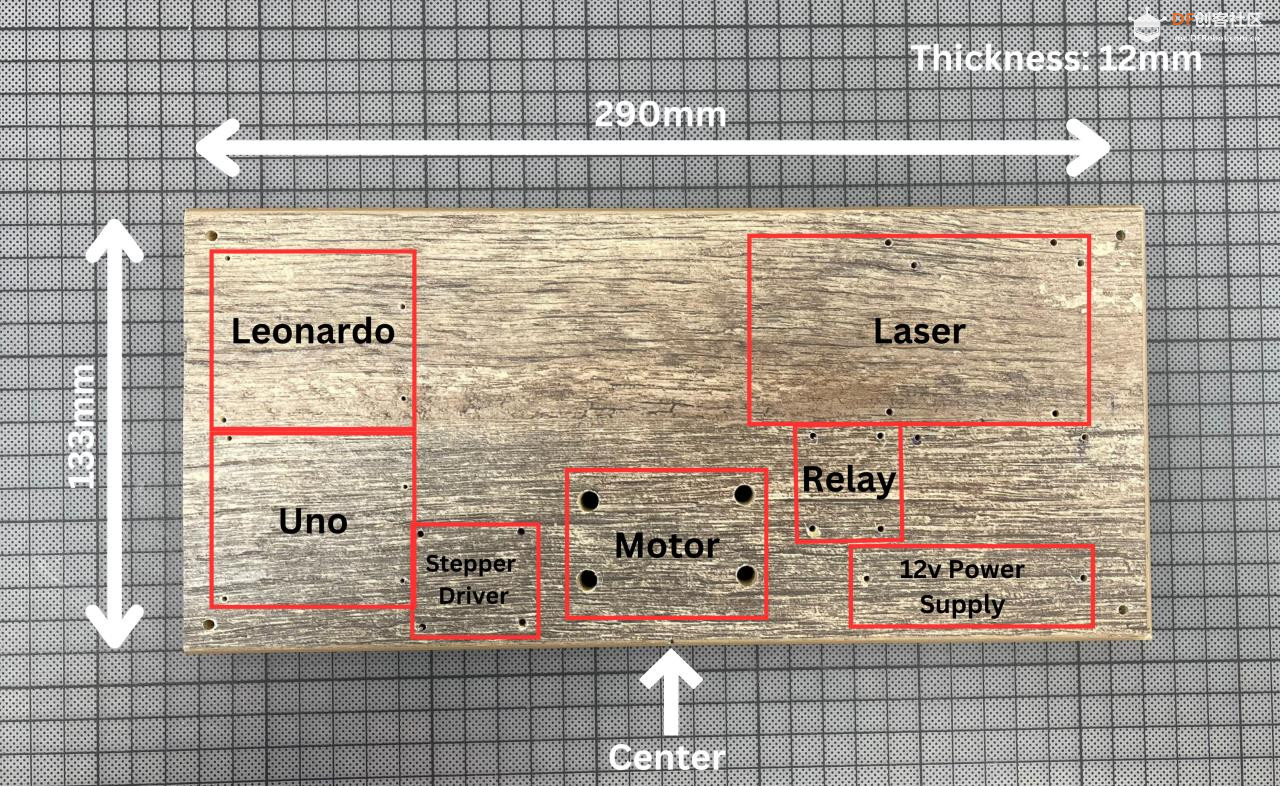
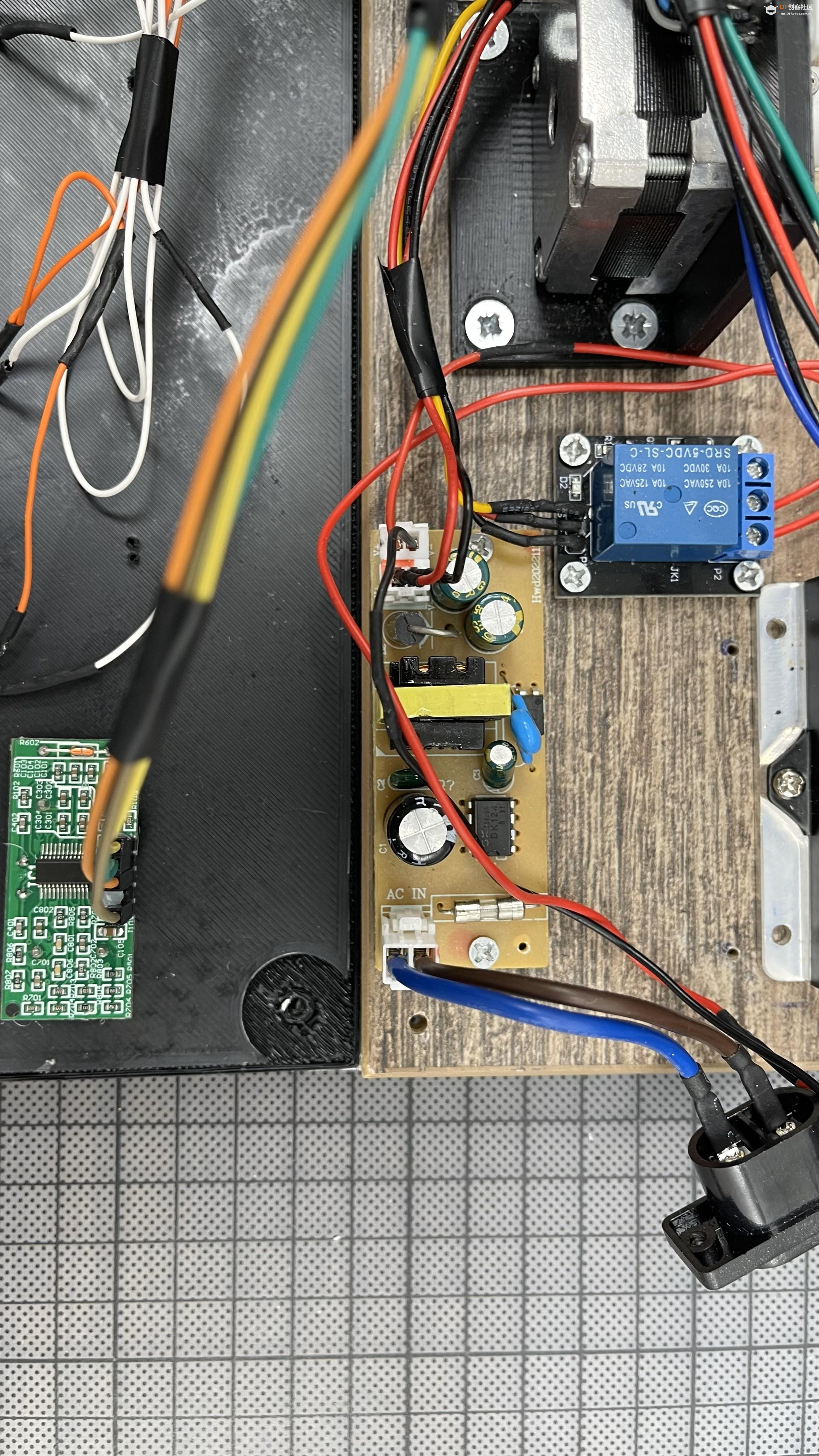
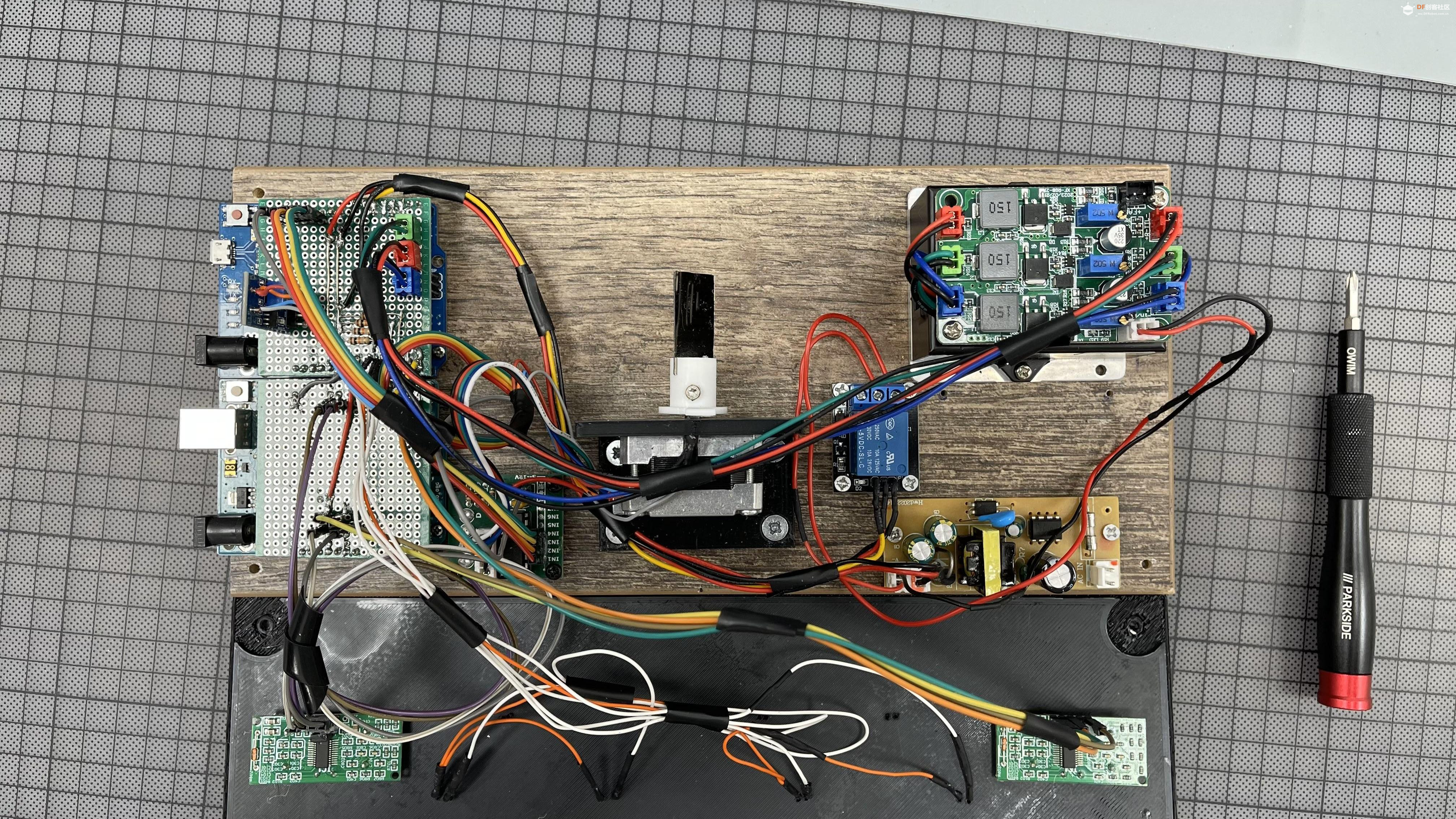
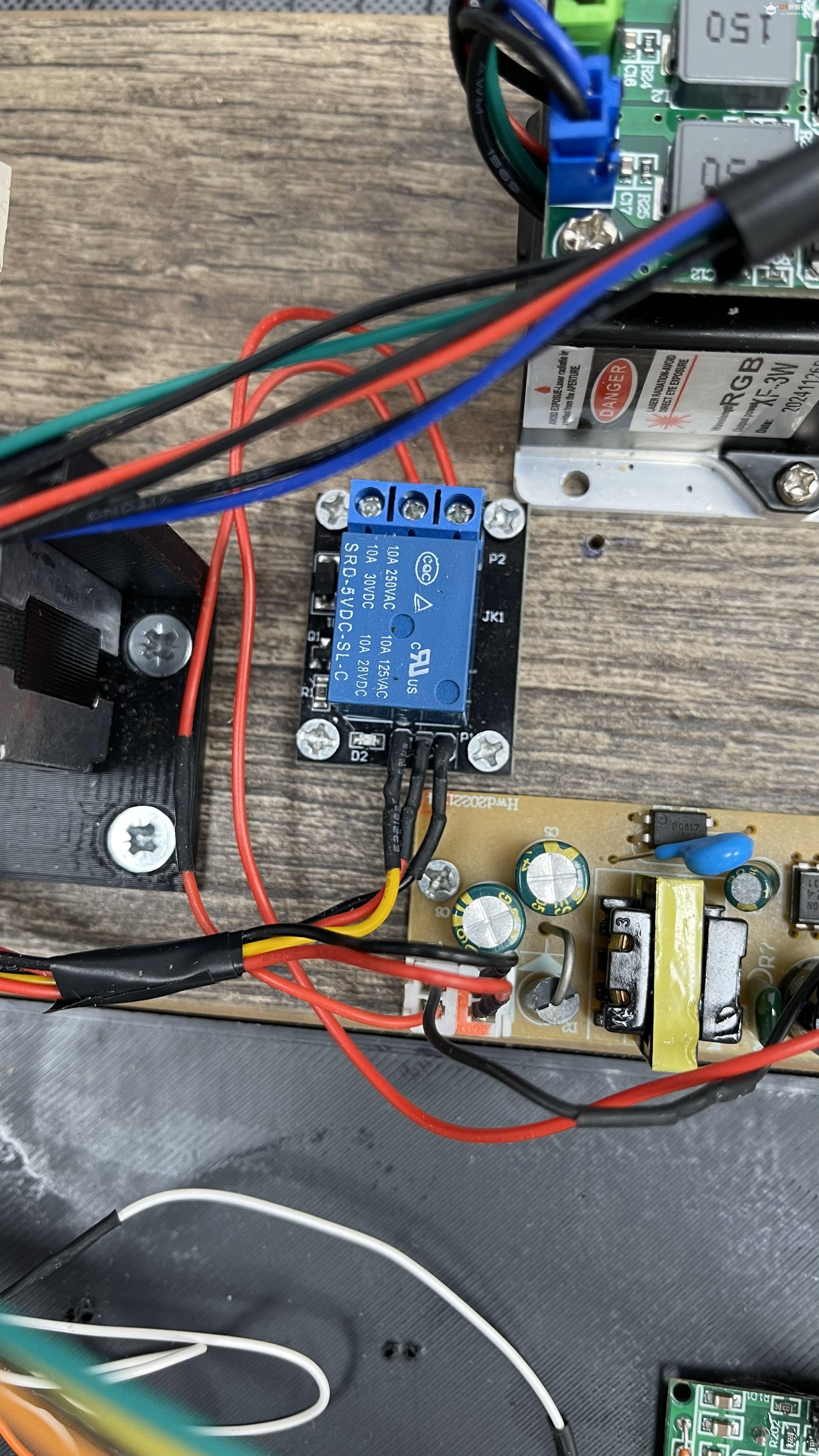
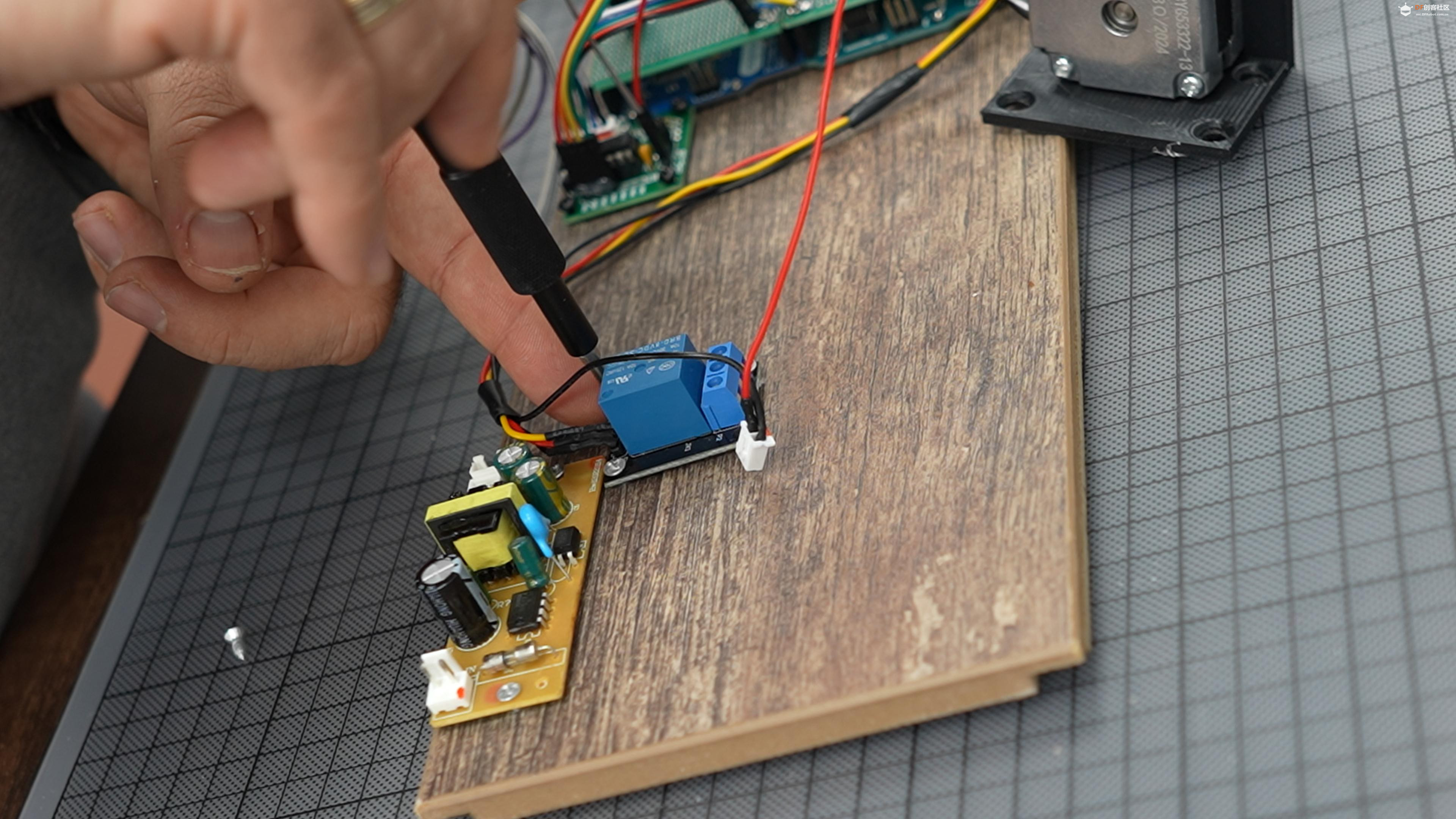
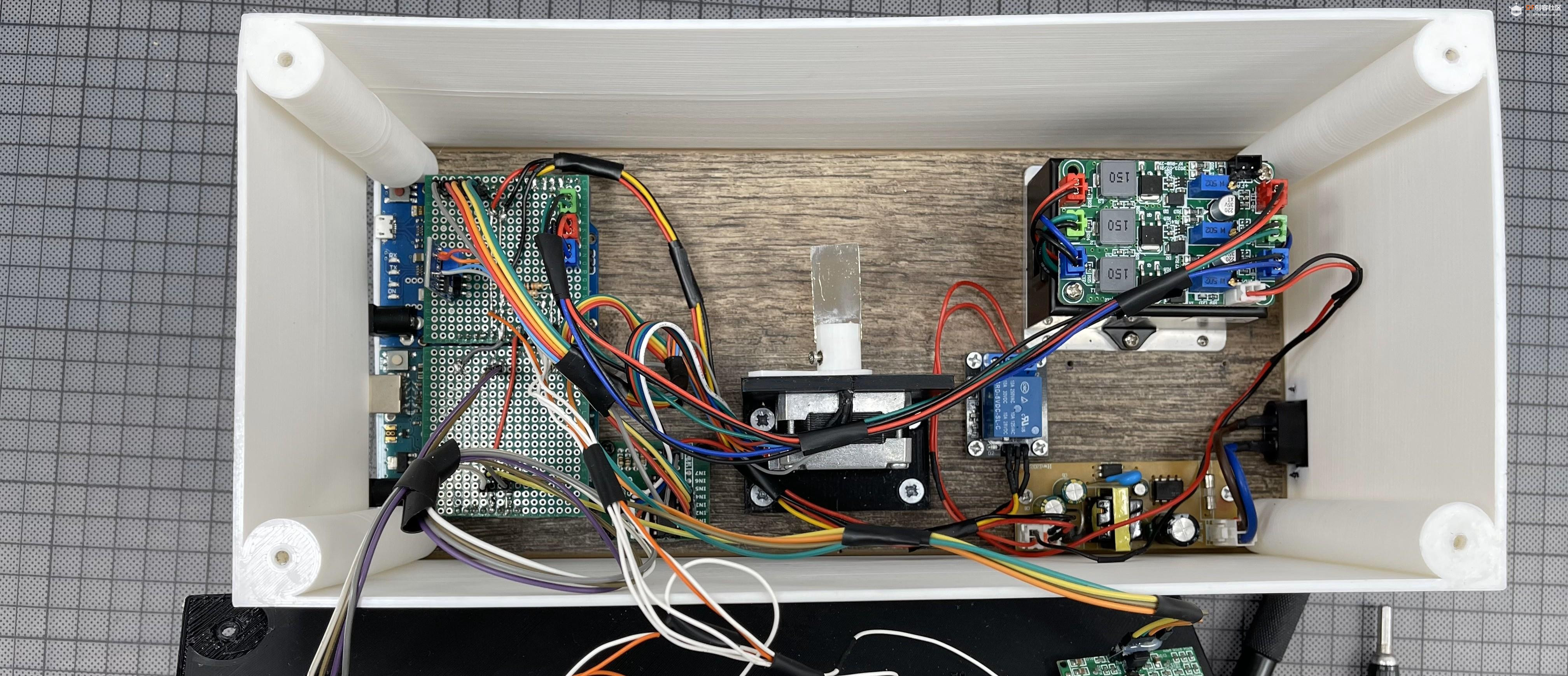
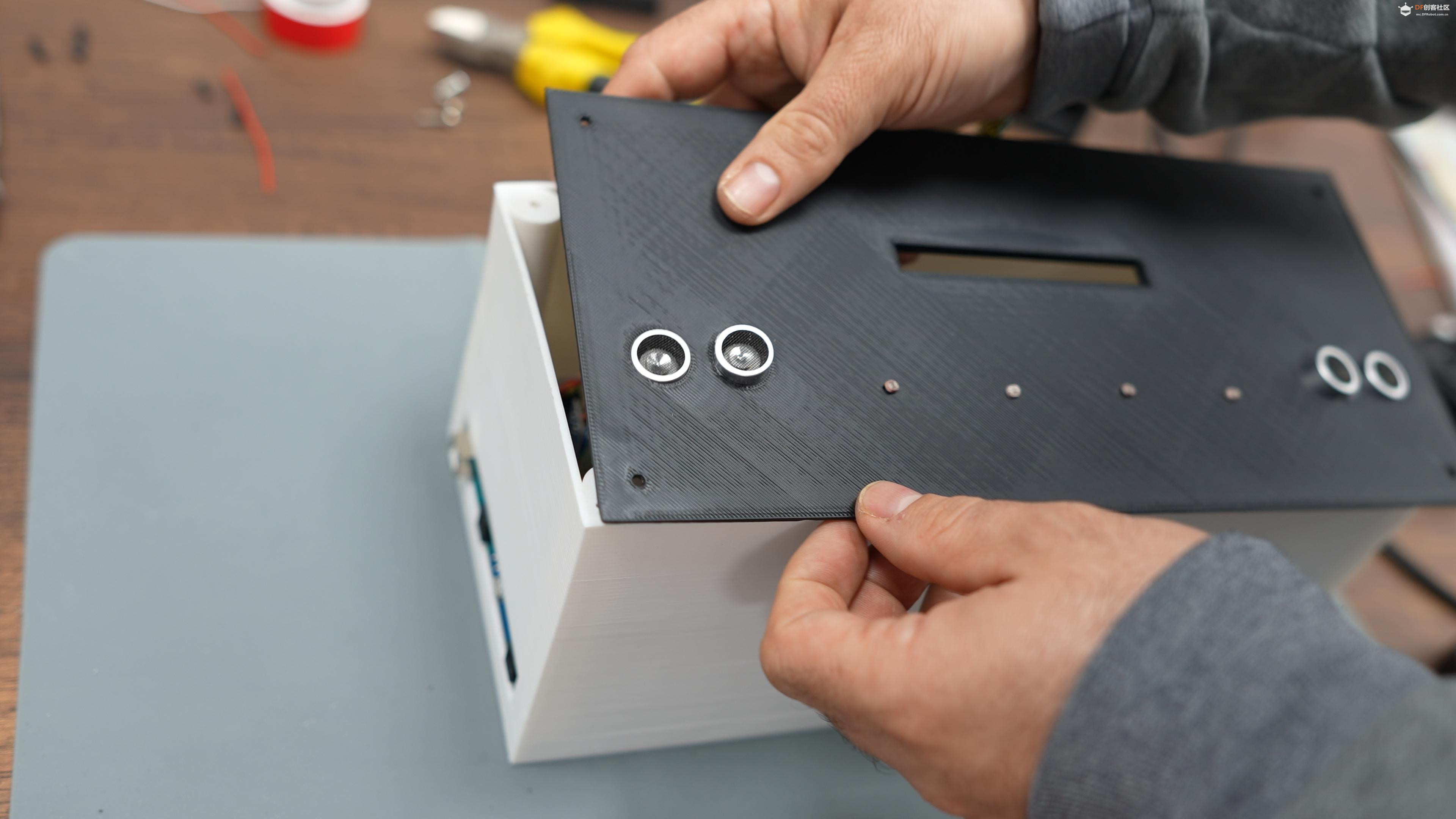
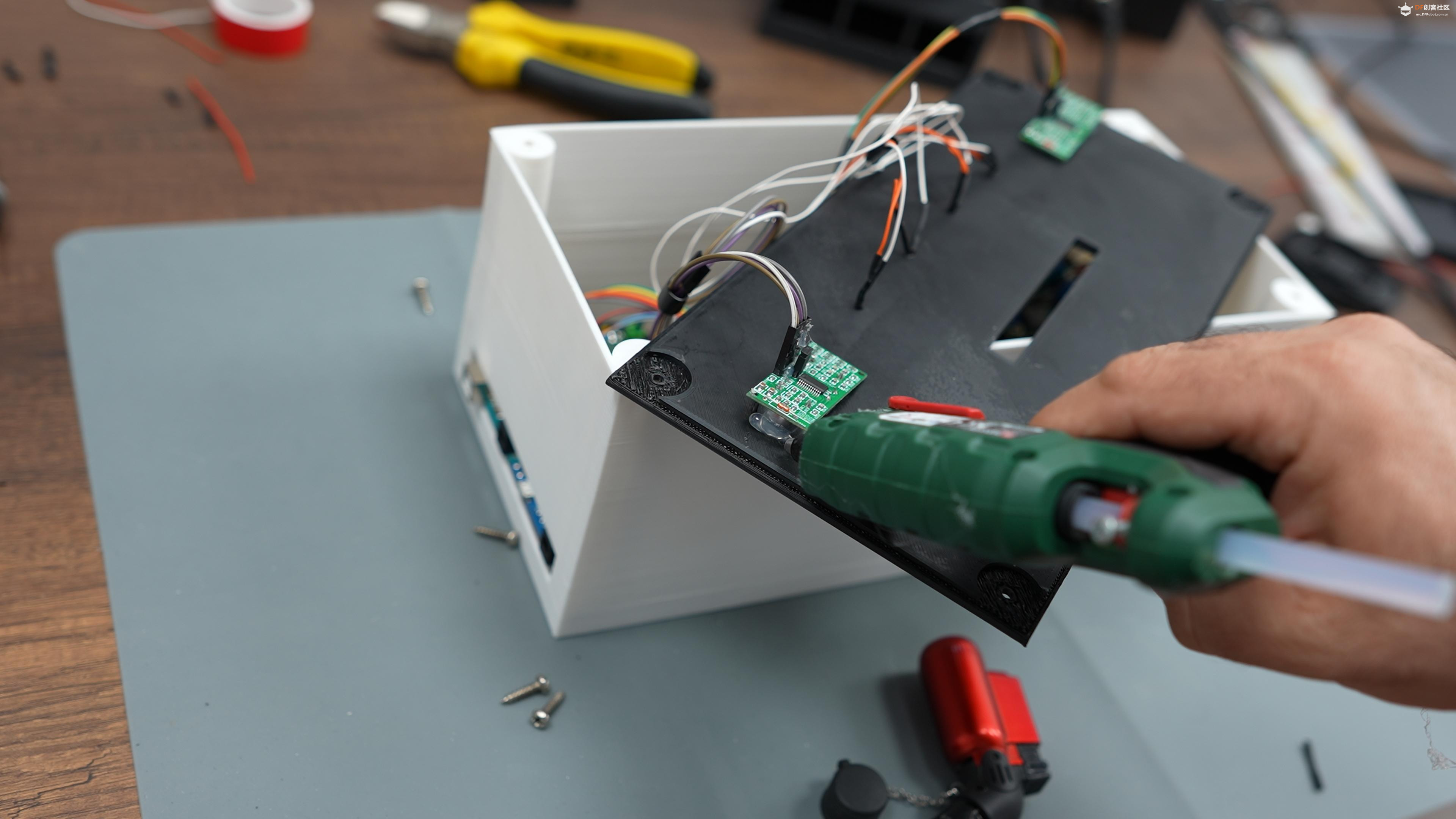
用品与材料 1 个 Arduino Leonardo 1 个 Arduino Uno 4 x 光敏电阻 LDR 2 x 超声波传感器 US-100 1 x 步进电机驱动器 ULN2003 1 x NEMA 16 39MM 1.8 度 2 相 4 线混合薄型步进电机 警告: 我正在使用一个 39BYG53322 步进电机,这是我从旧的 3D 打印机中抢救出来的。不幸的是,我在亚马逊或全球速卖通上找不到它。这是一款 NEMA 16、39 毫米、1.8 度、2 相、5 线混合步进电机。 1 x 继电器模块 1 x 12v 电源 - 我使用类似于这个的电源:https://amzn.to/3RaaXPv 1 x 激光 - 3W TTL 4 x10Ohm 电阻器 1 x TCRT5000 红外反射传感器 |
|
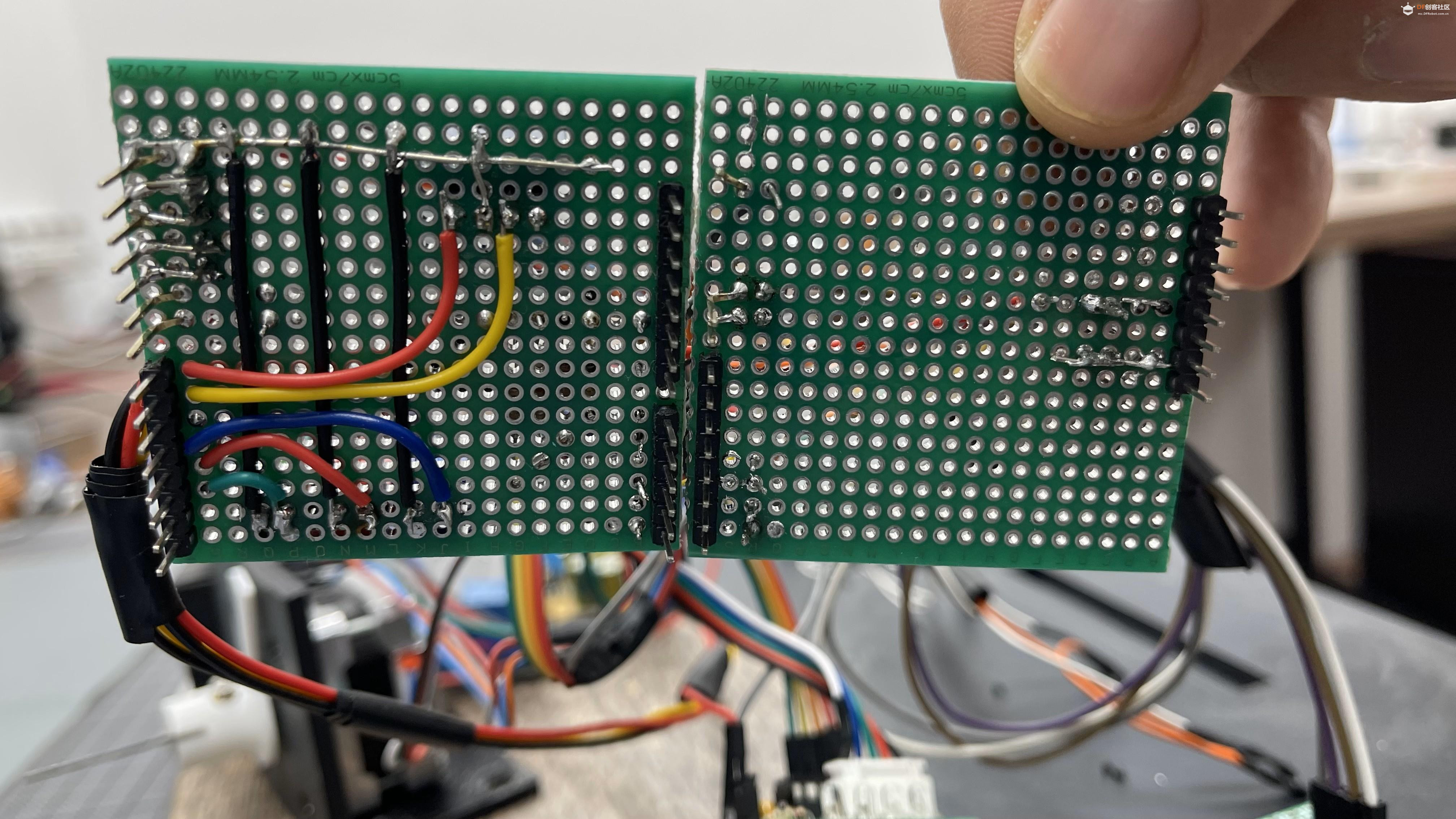
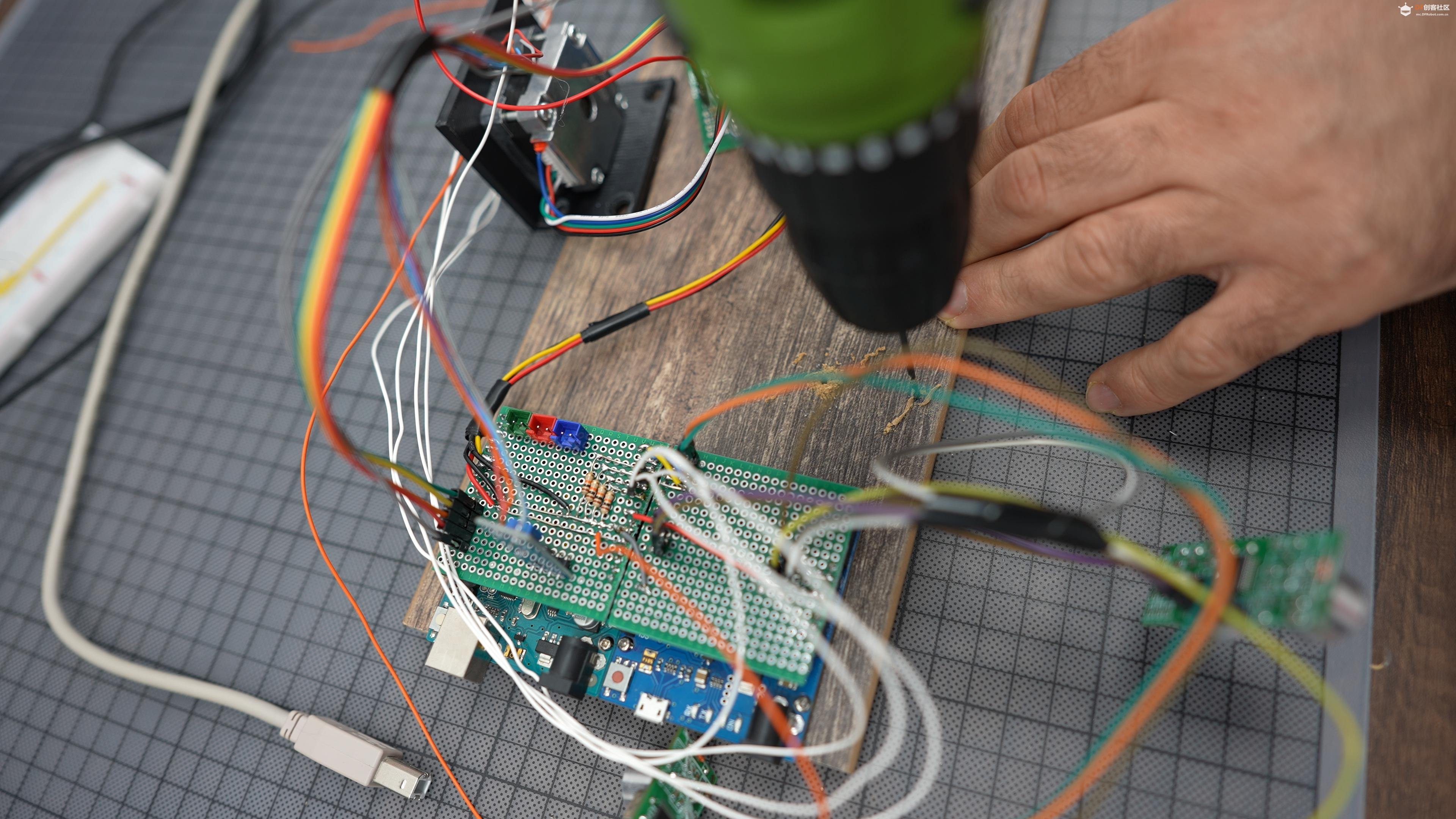
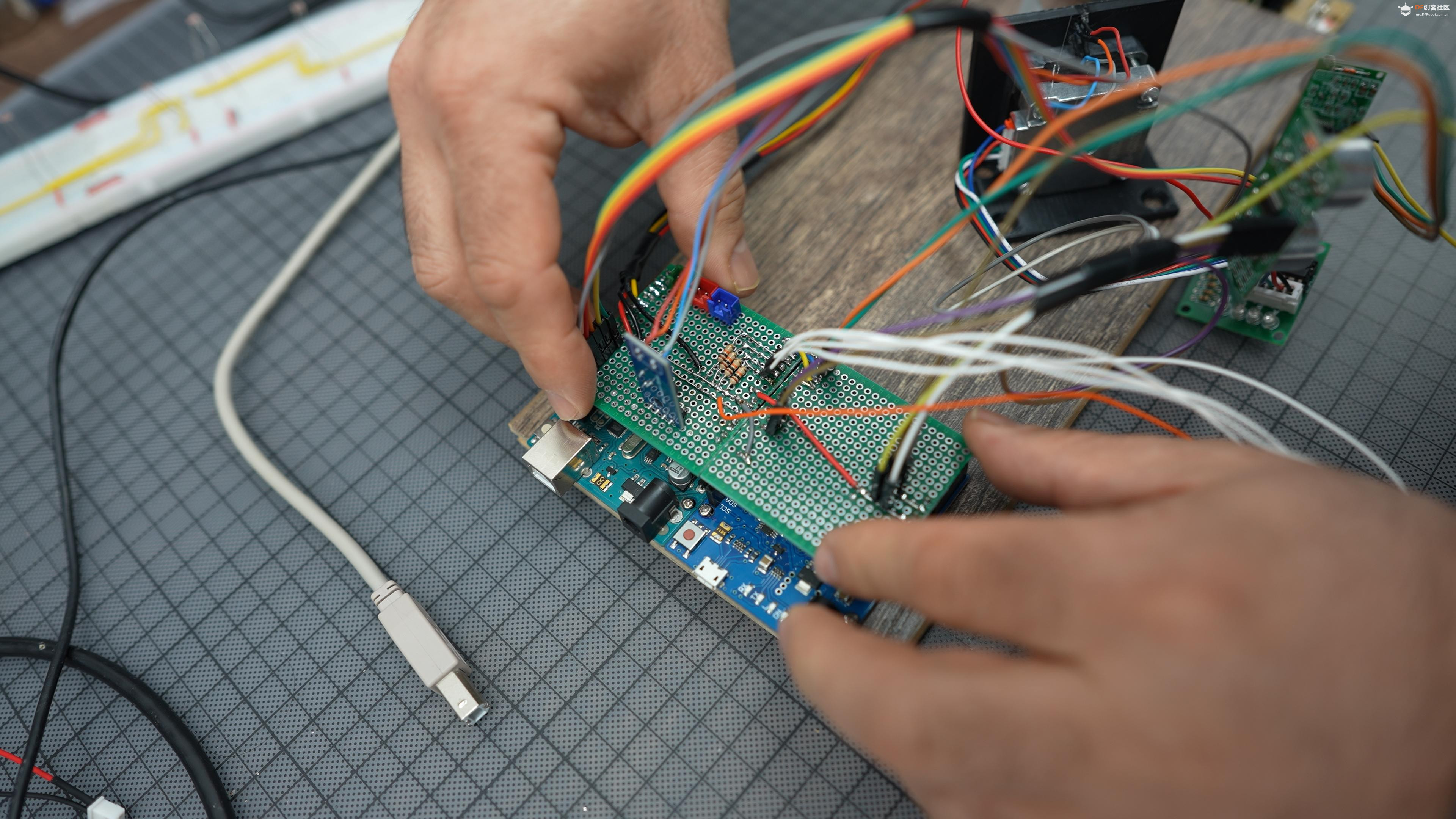
第 10 步:使用原型板测试所有布线 在继续焊接之前,我建议按照此处的ULN2003驱动器和 A4988 驱动器的原理图,使用原型板测试设置。 我建议在焊接元件之前,先用低功率激光器(约100-200 mW)对电路进行实验。它对眼睛还是很危险的,但是 3W 激光器在全功率运行时甚至可以灼伤黑暗的表面,想象一下它会对你的眼睛造成什么影响!使用低功率激光,您可以进行调整,直到看到七个投影点(如视频所示)。我不建议使用高功率激光器开发竖琴——使用较弱的激光器更安全、更容易排除故障。请记住始终佩戴经过认证且评级适当的安全眼 镜! 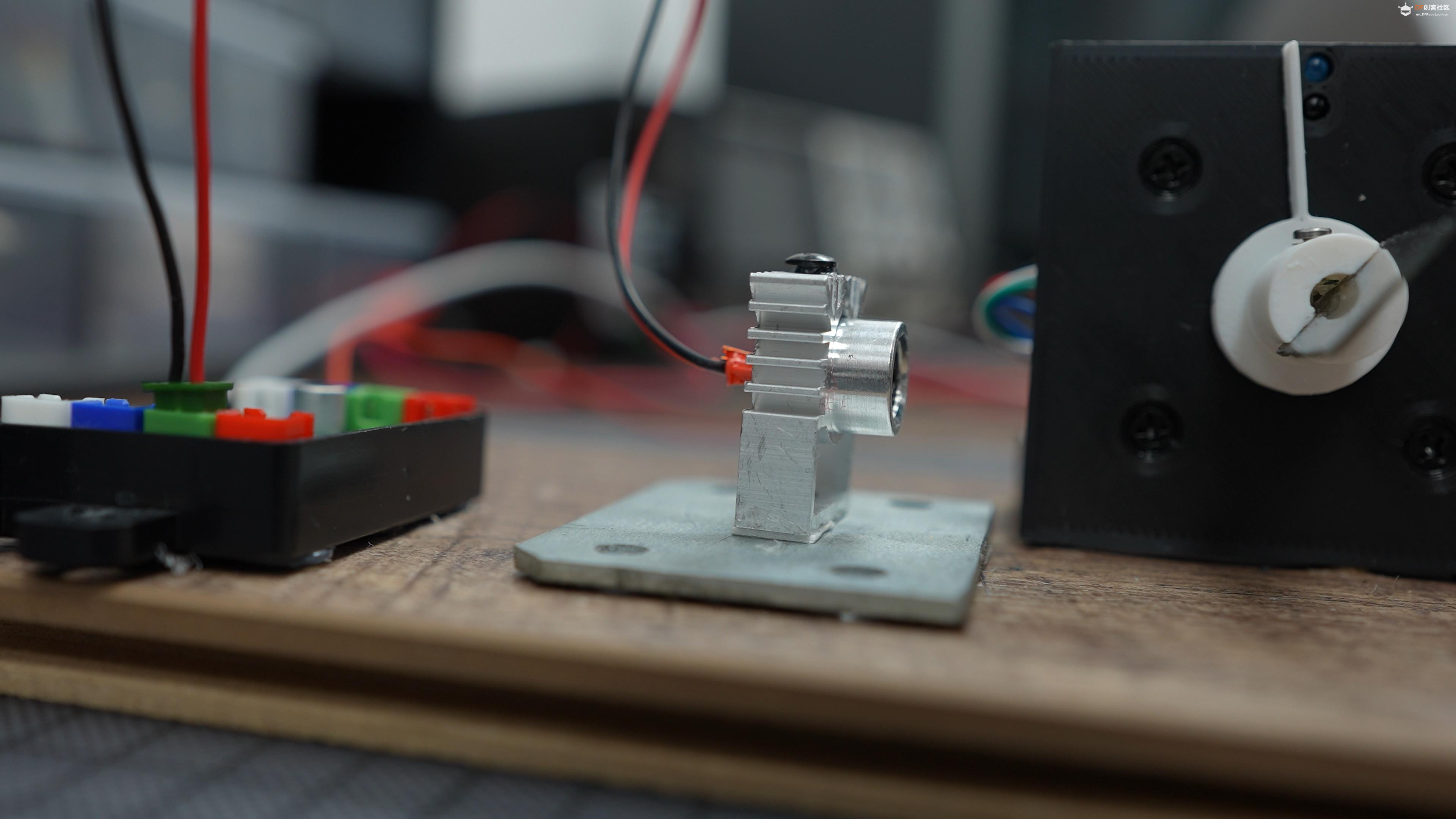 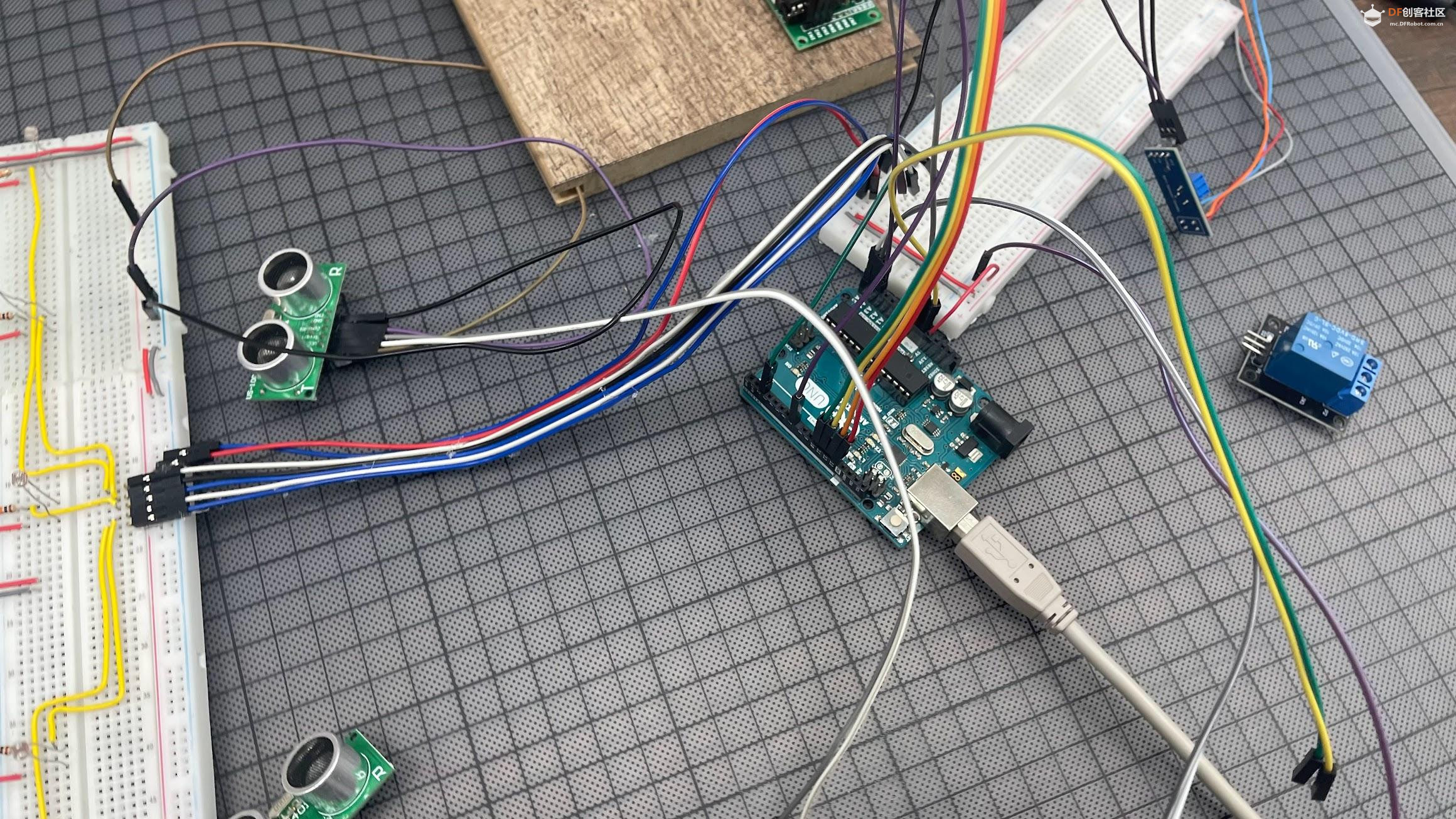 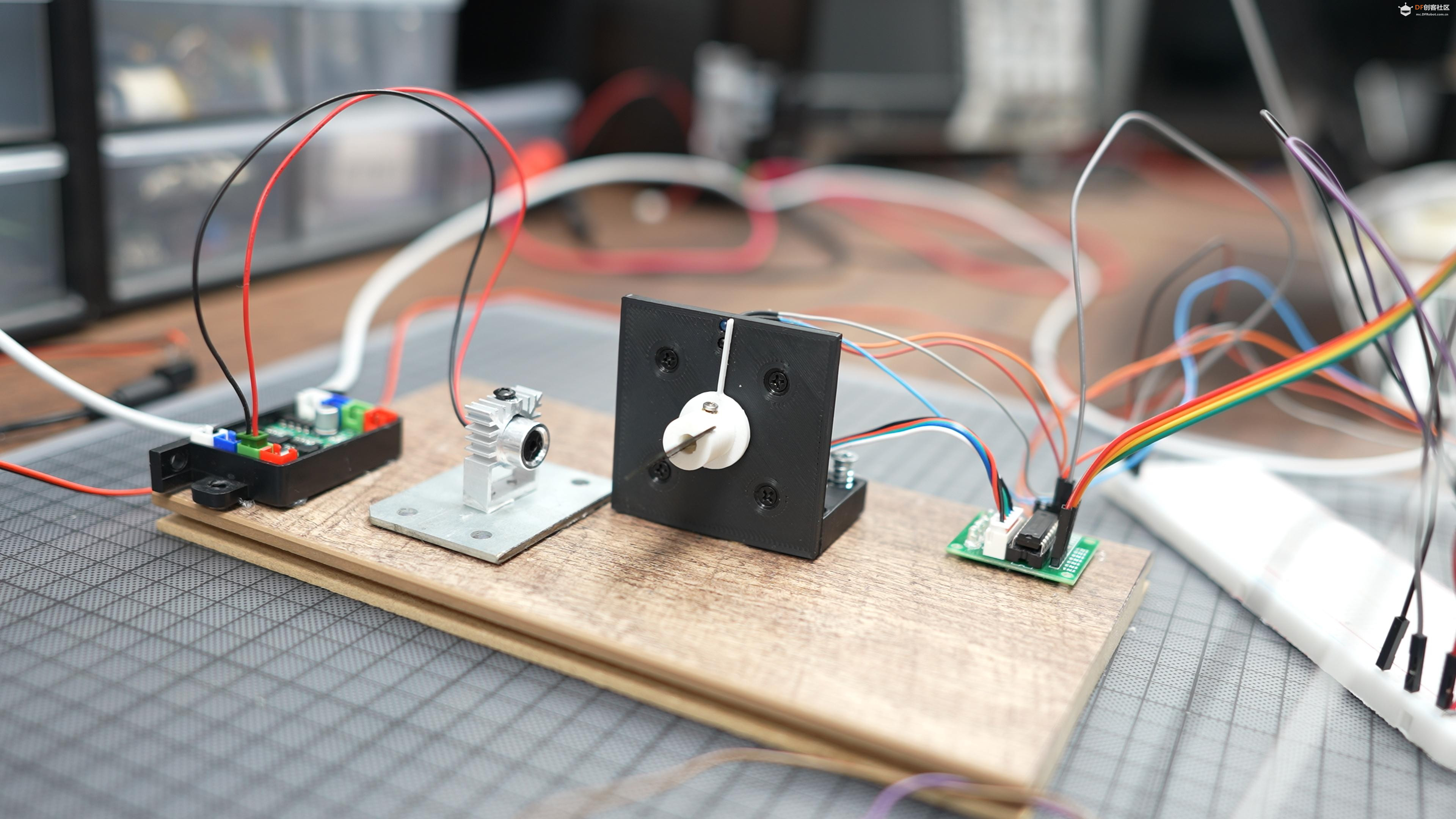 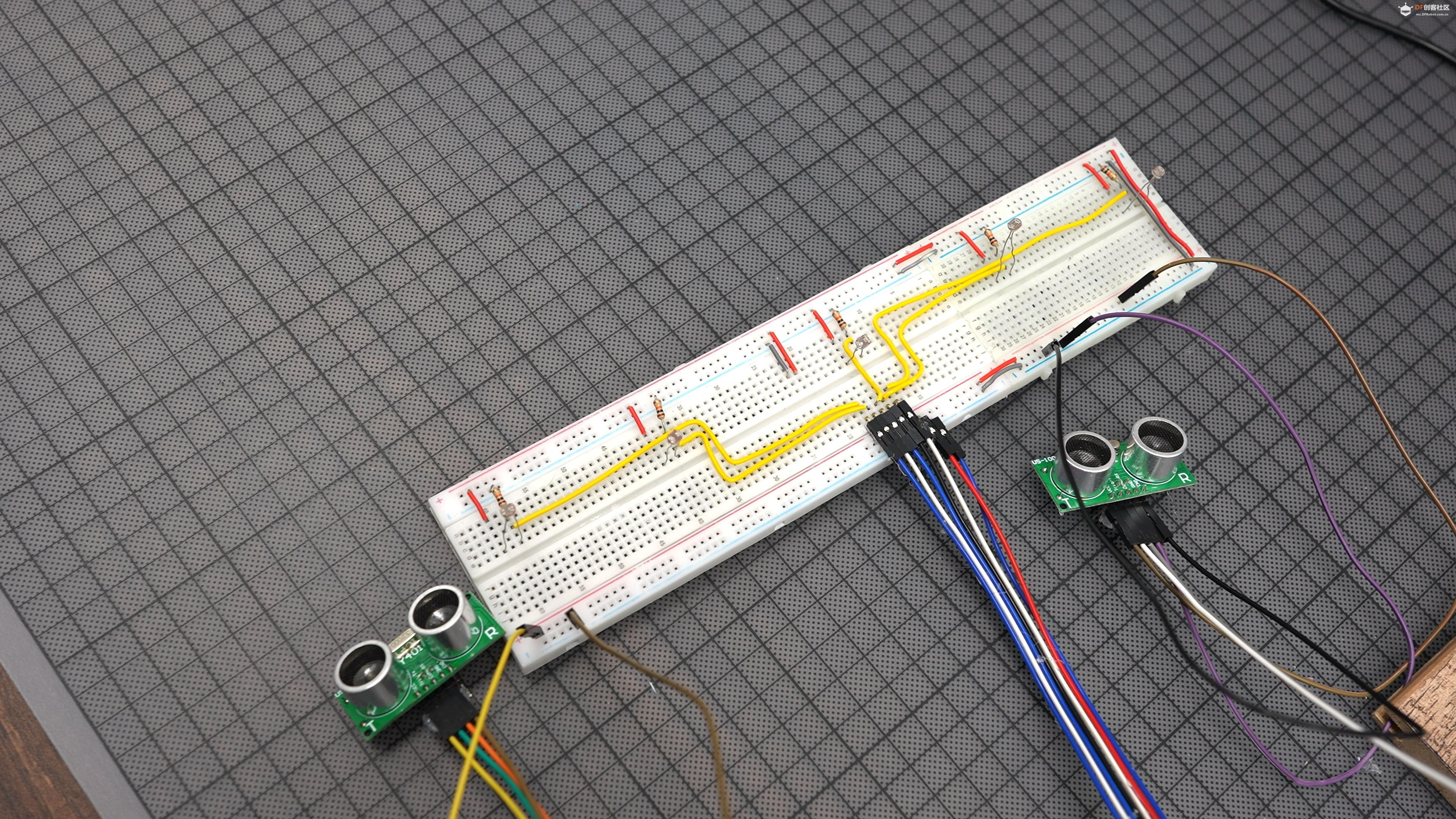 |
|
第 17 步:用竖琴演奏音乐 由于 Arduino Leonardo 可以充当人机接口设备 (HID),您只需将其插入计算机并启动您最喜欢的 DAW 软件即可。我正在使用 GarageBand,但它也适用于 Logic Pro、Ableton Live 和其他流行的 DAW。 从那里,您可以选择自己喜欢的声音并开始摇滚! 此外,您需要一台烟雾机来使光束可见并创建标志性的激光竖琴效果。 第 18 步:进一步的改进步骤 进一步的改进步骤 振镜扫描仪: 用振镜扫描仪代替步进电机将使竖琴有更多的琴弦和更亮的光束,因为由于步进电机的速度和精度,目前的设置仅限于七根琴弦。振镜扫描仪将能够更快、更精确地定位光束。 传感器高度:将传感器安装在更高的位置将进一步提高其检测光束中断的能力,并更好地跟踪手的高度。这将产生更准确的音符触发,并可能对声音进行更动态的控制。如果你仔细观察让-米歇尔的竖琴,你会注意到传感器的位置要高得多。 这些升级可以显着提高竖琴的性能和可玩性,使其反应灵敏和通用性更高。 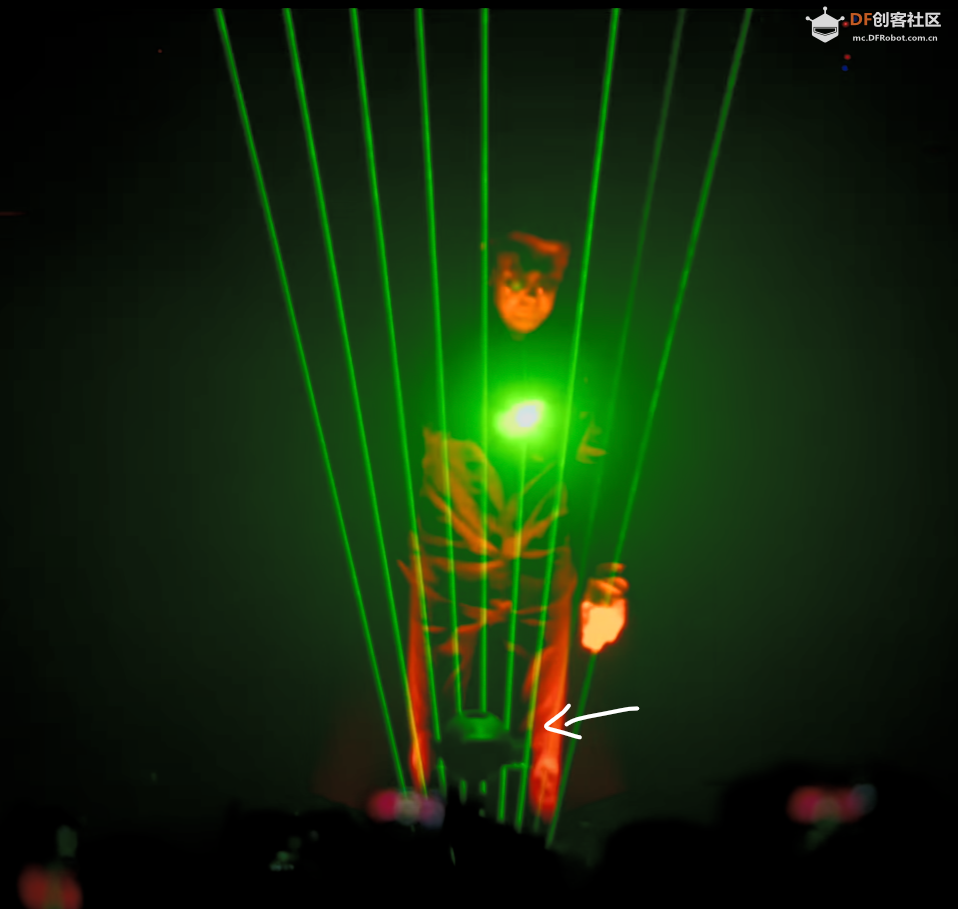 |
|
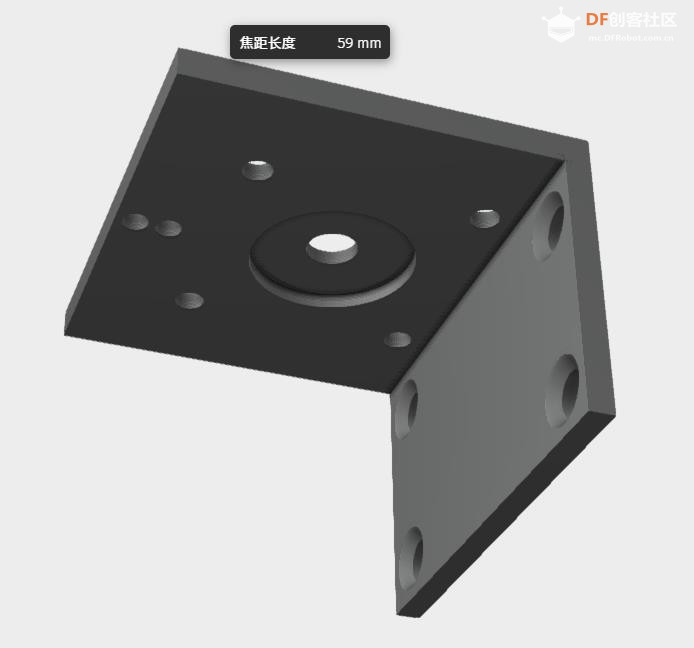
本帖最后由 驴友花雕 于 2025-6-6 17:59 编辑 第 19 步:最后的话 这个项目很有挑战性,需要大量的微调,所以要做好试错的准备。如果我错过了什么或不清楚的地方,请随时联系我们——我很乐意提供帮助! 此外,我怎么强调激光的危险性都不为过。高功率激光会导致严重的眼睛受伤,甚至灼伤表面,因此请认真对待安全。在使用激光器之前,请确保您佩戴了经过认证的安全眼镜并了解风险。花点时间对激光安全和正确的处理技术进行自我教育。 本指南仅供参考和教育之用,不能取代专业建议。如果您有任何疑问或具体的技术问题,请咨询专家。我不是专业的工程师或机械师,本指南基于我的个人经验。始终使用您的最佳判断力,遵守当地法律和安全准则,并了解所涉及的任何风险。 使用这些说明,您将承担可能发生的任何伤害、损害或事故的所有风险和责任,并同意放弃和免除我的任何和所有索赔或责任。请谨慎行事,自行研究,并对您的结果承担全部责任。 附录 项目链接:https://www.instructables.com/Laser-Harp-2/ 项目作者:保加利亚 Cybercraftics 项目视频:https://www.youtube.com/watch?v=c5HmCTt6hQ4 项目代码:https://github.com/cybercraftics/laser_harp 3D打印文件:https://content.instructables.co ... FPLB4E5M88SFWC9.stl |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶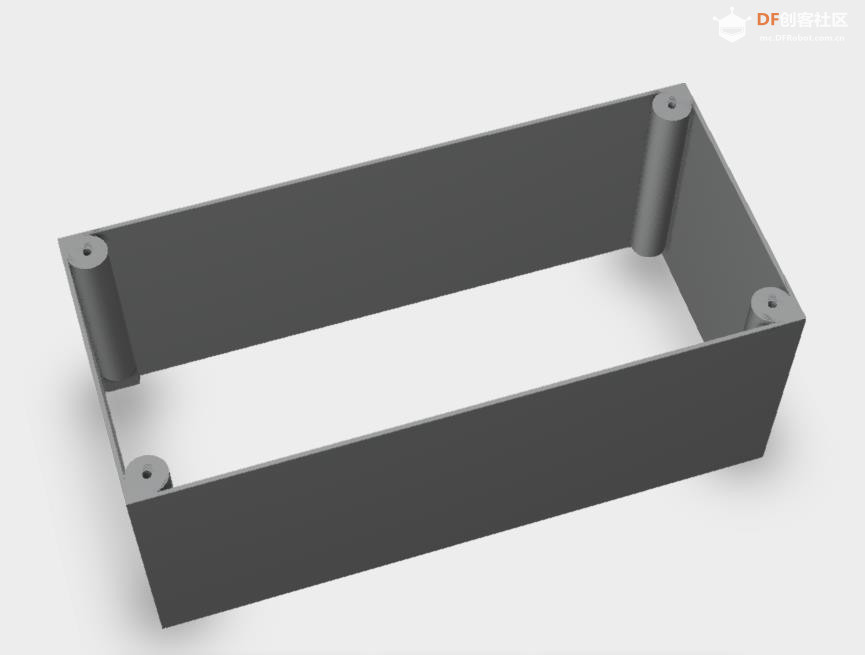









 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






