|
1915| 2
|
[项目] 【Arduino 动手做】基于五连杆机构的12 自由度腿式机器人 |
|
“Felin”是一款小型12自由度足式机器人,采用准直驱无刷执行器。其大部分部件,包括外摆线齿轮箱,均采用FDM 3D打印机和PLA材料打印而成。它计划参加2022年图卢兹机器人大赛。 这款四足机器人拥有四条轻量级的腿,基于五杆机构。每条腿有两根股骨和两根胫骨。髋部的两个执行器控制股骨角度,膝盖为自由关节。 该机器人使用B-G431B-ESC无刷伺服控制器,这是一个开源项目,带来了一款“基于意法半导体B-G431B-ESC1 Discovery套件的超低成本无刷伺服控制器”。FOC算法以40KHz运行,具有可编程PD位置/速度和PI电流控制。 此外,我们还开发了一个“Felin”ROS节点,实现了简单的3自由度小跑步态和6自由度姿态控制。该机器人可通过无线蓝牙游戏手柄(类似PS3)进行远程控制。步态算法仍在开发中。 ESC固件: 基于项目的执行器:“基于 ST 的 B-G431B-ESC1 Discovery 套件的超低成本无刷伺服控制器”: https://hackaday.io/project/1775 ... ss-servo-controller ST Discovery Kit B-G431B-ESC1 的自定义固件可从 git 下载: https://github.com/pat92fr/BrushlessServoController 使用贝塞尔曲线测试高速脚部轨迹。 我正在为我的DIY腿式机器人寻找一个平滑的摆动阶段轨迹,该轨迹能够适应较大的机器人速度范围(从0到1米/秒甚至更高)。该轨迹应实时计算,并应最小化足部速度和加速度以及关节速度和加速度,以便在站立阶段开始时获得良好的跟踪效果并最小化地面冲击力。 贝塞尔曲线解决方案尚不完美!在站立阶段初期仍然存在位置超调,这可能会导致机器人落地时与地面发生碰撞。不过,在相当高的速度下,足部位置跟踪并不算太糟糕,这取决于足部轨迹曲线以及无刷电机控制器的设置(位置控制环路的 Kp 和 Kd、FOC 电流环路的 Kp 和 Ki,以及 FOC 的实现)。PID 是为机器人在地面行走而设置的,当机器人不接触地面时,PID 可能并非最佳。这需要进一步分析,但这些初步实验已经很有意思了。 Git: https ://github.com/pat92fr/FootTrajectoryPlanner  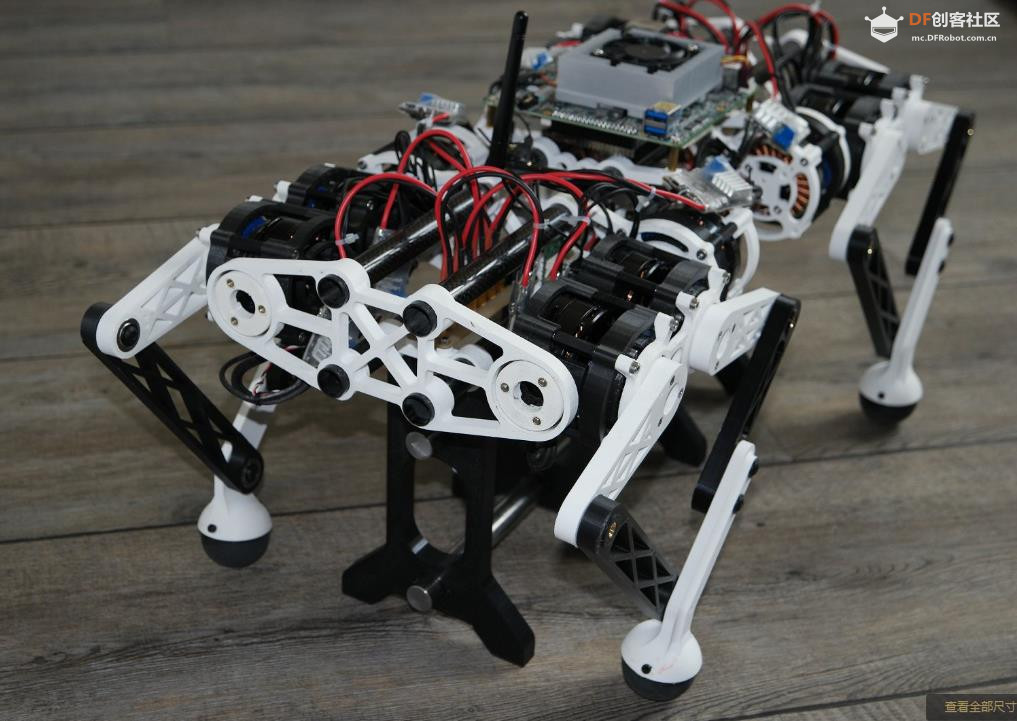    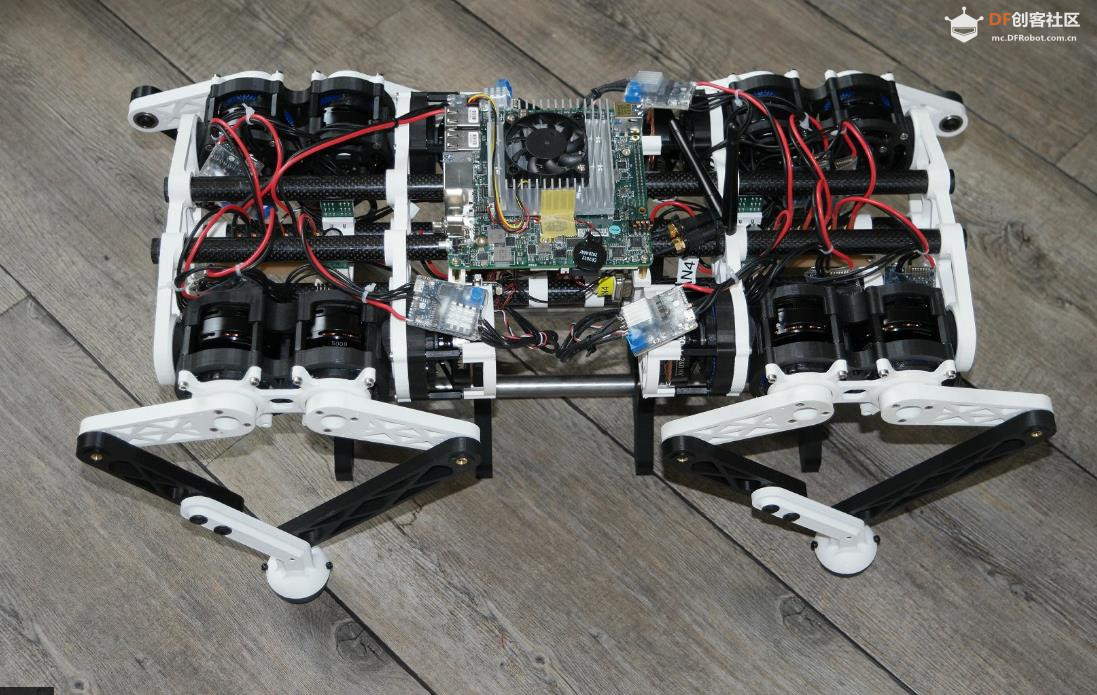  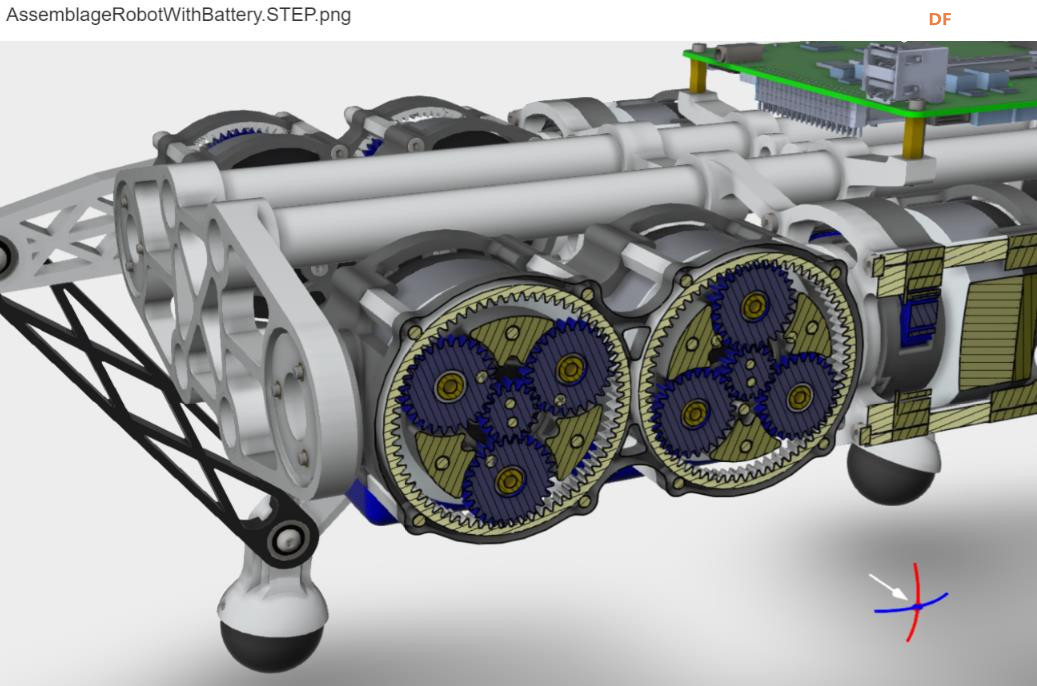 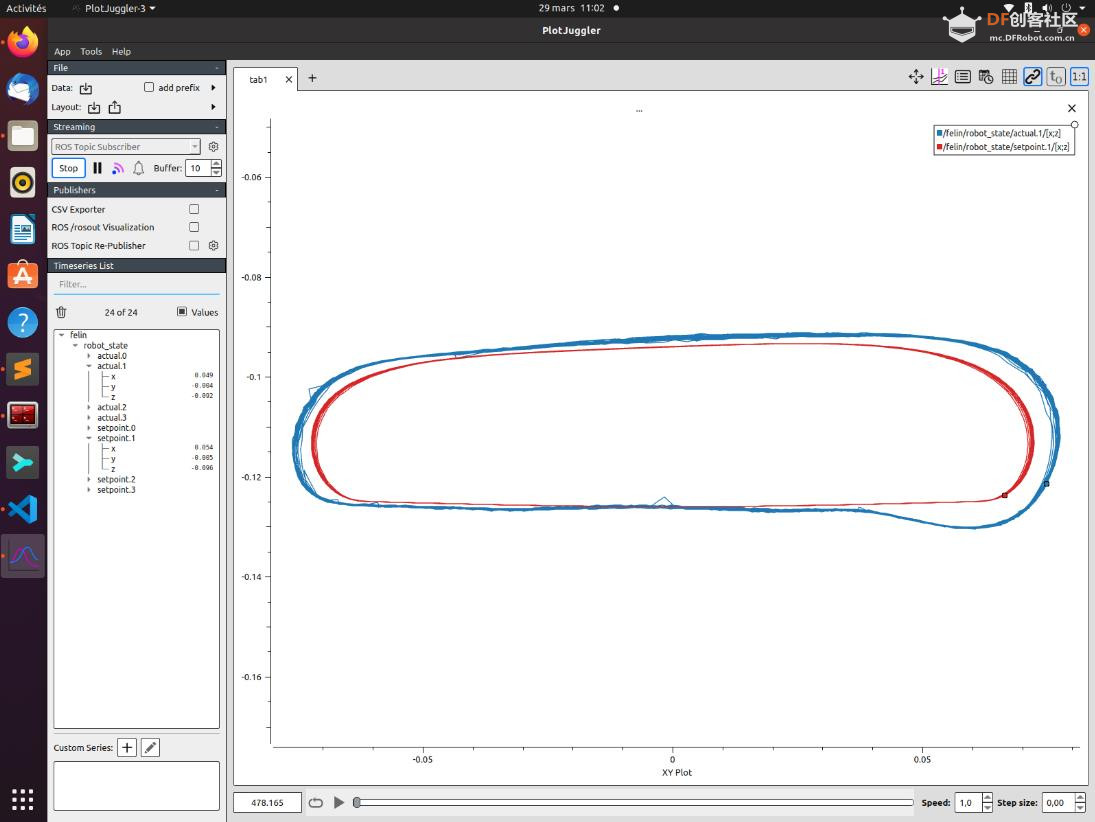 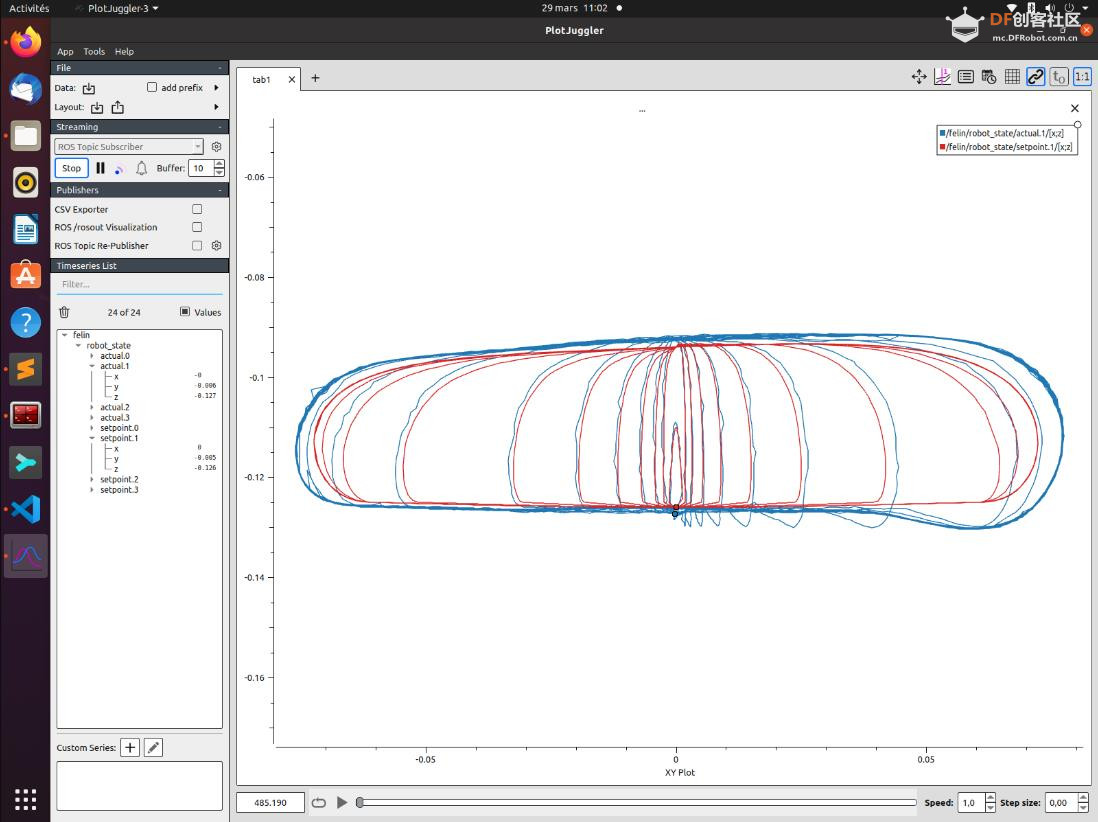 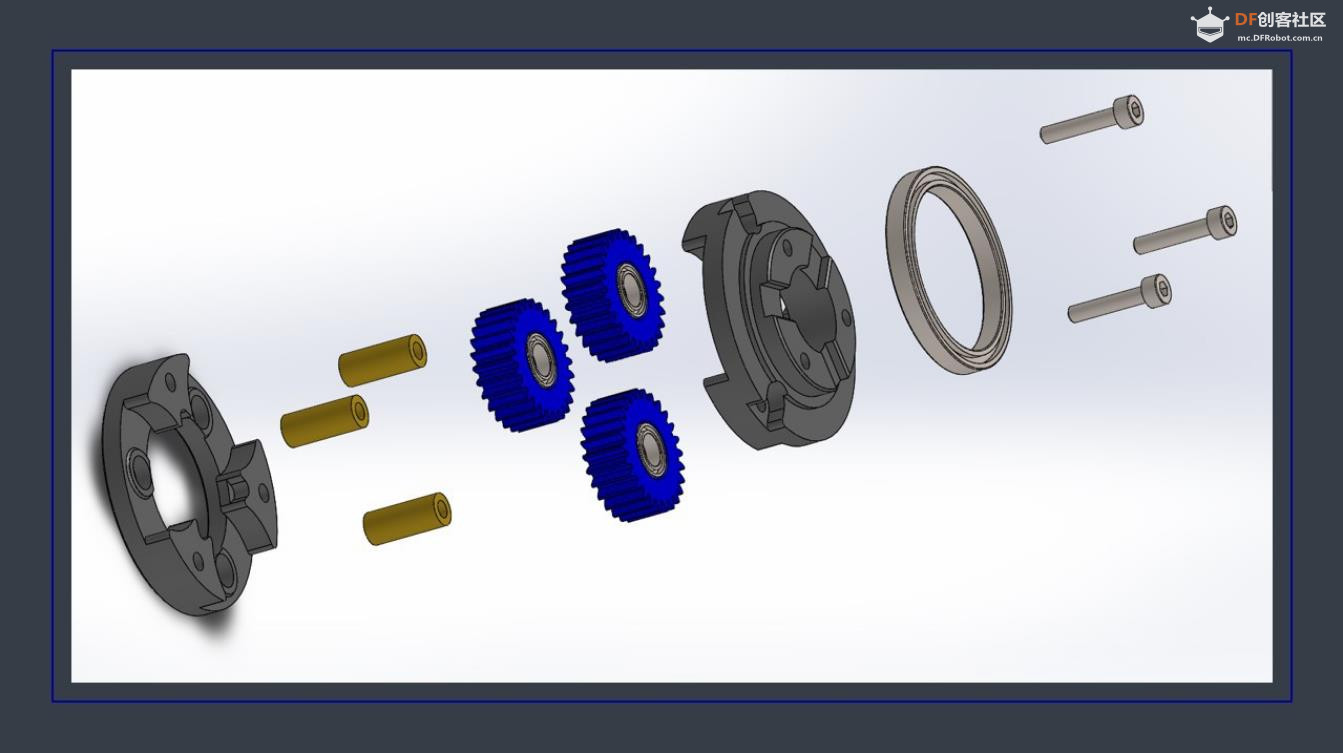   |
|
附录 项目链接:https://hackaday.io/project/184679-felin-quadruped 项目作者:pat92fr 项目视频 :https://www.youtube.com/watch?v=UBhod8Jp6H0&t=1s https://www.youtube.com/watch?v=uGRYP5HGdUk&t=5s https://www.youtube.com/watch?v=t2Dbn3NhXfY 项目文档:https://cdn.hackaday.io/files/18 ... uctions%20v0.01.pdf 3D 文件:https://cdn.hackaday.io/files/1846797901306336/STL%20v0.01.zip 机械设计查看器: https://autode.sk/3qW5eA4 ESC固件: 基于项目的执行器:“基于 ST 的 B-G431B-ESC1 Discovery 套件的超低成本无刷伺服控制器”: https://hackaday.io/project/1775 ... ss-servo-controller ST Discovery Kit B-G431B-ESC1 的自定义固件可从 git 下载: https://github.com/pat92fr/BrushlessServoController  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶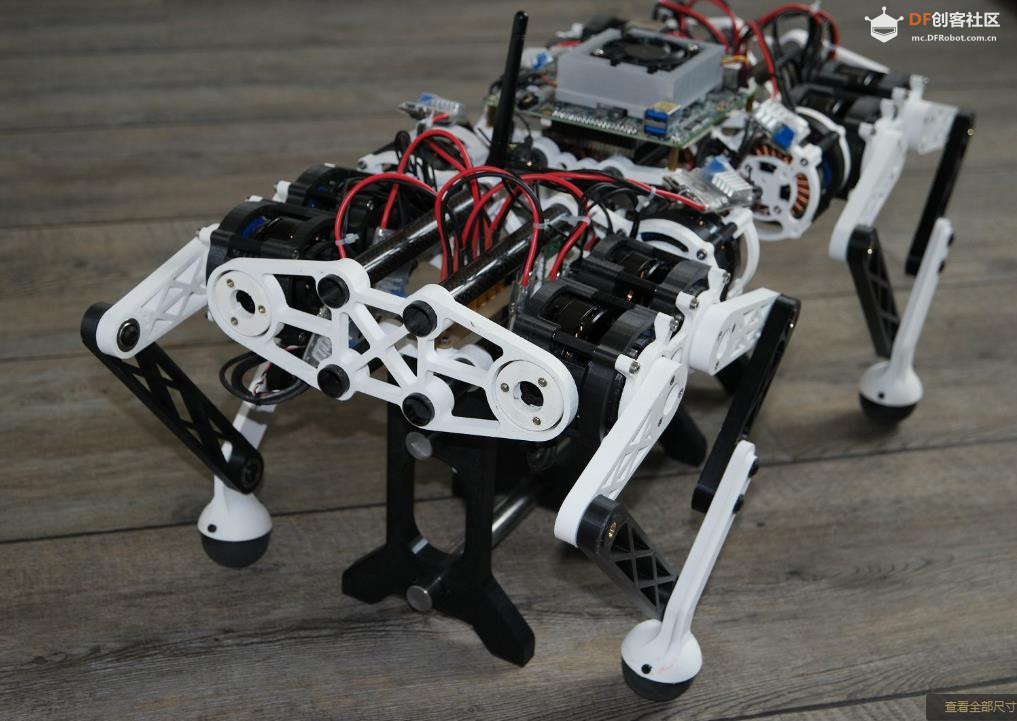

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






