|
36518| 24
|
[王大师出品] 【王大师出品】格斗机器人的大爆料 (持续更新) |

|
应广大爱好者要求,我。。。。。。被逼,写这么一篇格斗机器人剖析的文章,哈哈哈,开玩笑了。是这样的,有个朋友给我发信息说王大师,我们还想再多看一些国外的机器人,从他们的机器人,学习一些经验。。。日后我们也能够造出这么出色的格斗机器人,跟他们干一场!所以,看此小朋友这么热切,我就了了他这个心愿! 首先,我们要来介绍的第一个机器人,就是当家冠军Tombstone,墓碑,说实话这次参加铁甲雄心,真的很庆幸,交到Rick这个朋友,他们这的帮助了我很多,我也从中体会到了制造格斗机器人的一些真谛,学到了很多。那么我告诉你们,我曾经就犯下了一个很大的错误,有点太自负了,小瞧了这个比赛,小瞧了这个机器人,因此比赛结果很是不满意!诶。。。。。。 废话不多说,我来跟大家介绍下这台神机,墓碑!也是我所崇拜的对象~  (Last Rites)  其实墓碑这台格斗机器人,结构是极其简单的,这也就像机械设计经常说的一句话,结构越简单越可靠,其实对于造机器人,就是这个道理!墓碑主要采用4130铬钼钢钢管焊接而成,作为其主框架。说到这个4130钢管,其实就是制造赛车、越野车使用的结构钢管,强度当然就不用说了吧,其实大家如果需要知道更多关于这种材料的,后面我们会结合焊接,专门对这个材料来进行解说,这里我就不做过多的介绍了。PS:rick跟我说,以后一定要用4130钢管,别再用钛合金了,又贵,焊接要求又高,没必要。 4130铬钼钢有一个很好听的英文名,我超鸡喜欢:Chrome Molly Steel  其次,我们看到,墓碑的武器支架,中间的部分,是有好几根钢管做结构坚强处理的,其实很简单吗,就是数学老师教的三角形稳定性。不过说实话,造这种焊接的机器人,尤其还使用圆管焊接的,最难的就是这个坡口的问题,嘿嘿,又提到了一个关键名词,坡口,这个以后我也会专门写一篇教程,教大家怎么导出这个坡口的二维图纸,说实话这个可是很多人梦寐以求的教程啊~~~哈哈。 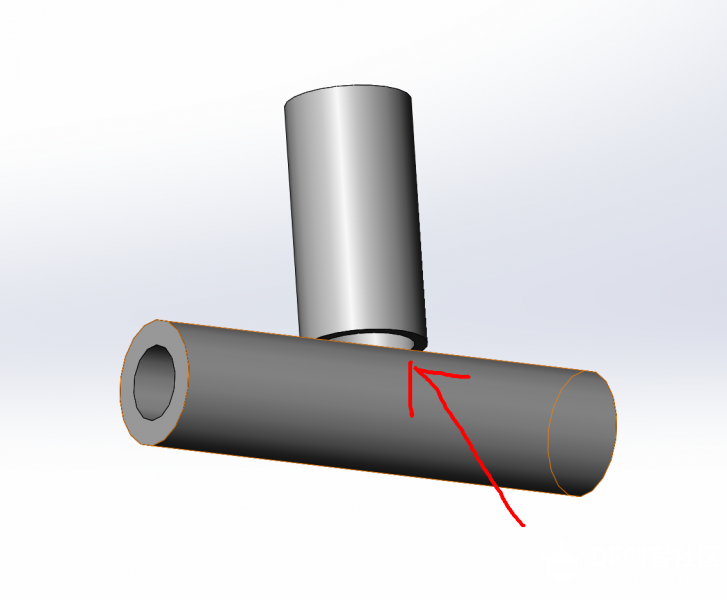 我还是不卖关子了,说下为什么最麻烦事这个坡口?我们想一下,两根圆管需要呈90度摆放焊接,那竖直的这根管子切口肯定是圆的,月牙状,才能卡在横着的这根管子上,然后才能焊接对吧!如果切口是齐平的,怎么固定在这根横的管子上呢?就算固定上了,也就接触的两个点能够焊接,这连接能稳固吗?  我们再来看一下墓碑的行驶电机的安装,前两天,我刚写的格斗机器人的两大核心,就将行驶摆在了首位。墓碑所使用的是NPC-T64的减速电机,至于他这个电机有没有换更小减速比的齿轮组,这个我就不太知道了,不过我觉得是没有的。之前Rick很傲气地告诉我,他们背后有NPC做赞助商,比赛坏了直接换新的,土豪啊。。。不小心说跑题了,它的两个电机的安装,各用了六个很大的缓冲胶垫,就是防止战斗时机器人飞起来落地,所产生的冲击力影响机器人的稳定性。使用了这个缓冲胶垫,能够有效地隔离震动,将损失降到最低。经过了参加铁甲雄心的比赛我也发现,很多的选手机器人已经开始加装这个缓冲结构了,是挺有效的!推荐! PS:搜橡胶减震器可以买到~ 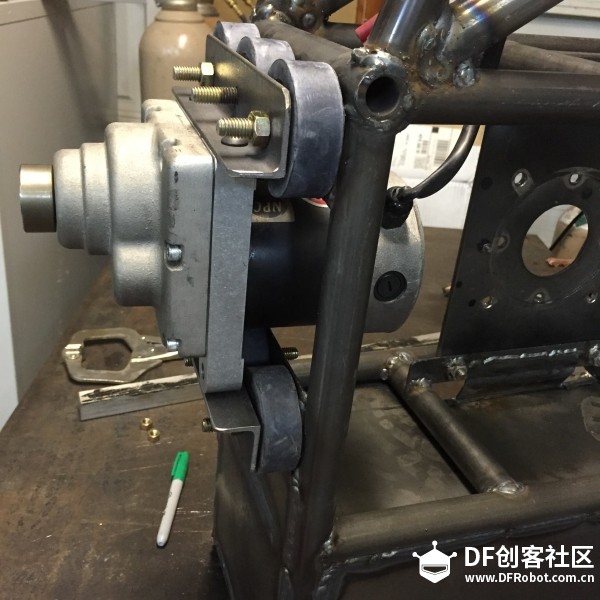  我们再来说一下它的武器,其实说实话之前还没参加比赛,我一直不理解,为什么说他要根据不同的选手换武器?直到前一段时间我看了一个国外的论坛,才明白。是这样子的,对战移动速度比较快,比较灵敏,然后装甲又没有很厚的机器人,他们就会使用铝合金的大刀,其实道理也比较简单,轻吗!轻的话它行驶电机的负载就小,行动会稍微快一点,而且武器的的启动时间也更快,这是一些我个人的看法。其次就是如果说遇到重装甲的机器人,他们会使用更厚而且更重的4130铬钼钢大刀,摧毁对方的装甲。还有就是钛合金大刀,他是这么说的,主要是为了表演,作秀,因为打在别的机器人装甲上面产生的火花会特别漂亮,这个我很有体会的!钛合金撞击产生的火花是有点偏白色的,而且火花很多,相当漂亮! 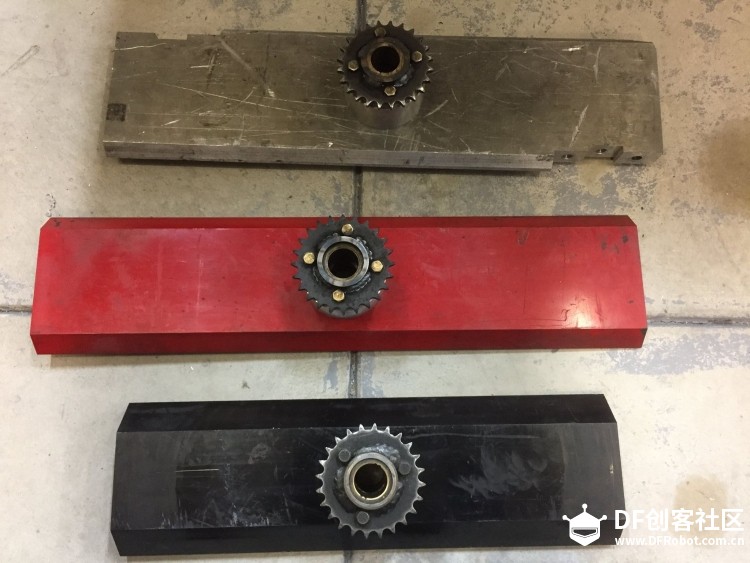 最后啊,再来看一下它的内部构造吧!我们看墓碑的后屁股,也就是电池仓,有很多的泡棉作为缓冲,大家都知道,电池可是一个机器人的血液啊,那是相当重要的,务必好好地保护起来!其次就是线缆,该固定的一定要固定起来,锁起来,充分得保证工作的稳定性。 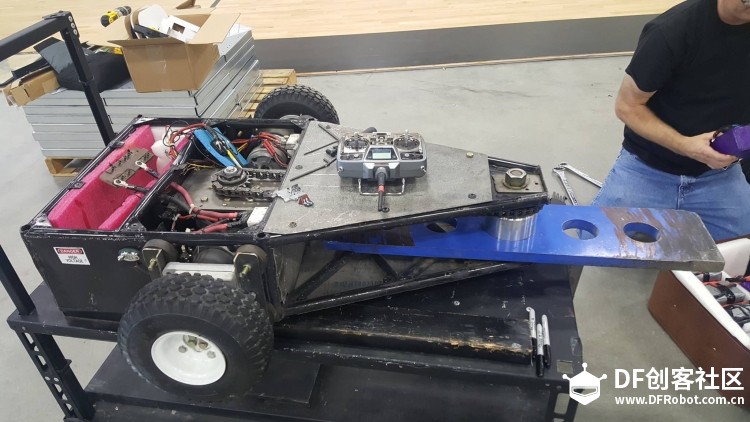  可能还有一些我没有提到的点,大家可以回复哦,也好交流交流,哈哈 建造难度:☆☆☆☆ 操控难度:☆☆☆☆ 攻击力:☆☆☆☆☆ 防御:☆ 其它精彩文章分享: |
|
本帖最后由 swanglei 于 2018-1-21 11:39 编辑 嘿嘿,今天我爱给大家介绍的这台机器人是Beta,纯正的英国血统!这台格斗机器人出自John大大之手!其实我们在参加铁甲雄心的时候见过他,当时我看到这个老头,留着一下巴白色大胡子,还觉得挺帅的,说实话就是我心中我老的时候的那个风范~就是一个字:酷!我的机器人当时在测试的时候,包括建造的时候,他也过来参观过,说我造得挺不错的,我其实还挺高兴的,呵呵。其实,也说不上来,第一眼看到他总感觉在哪里见过,当然了,后来才知道他可是大名鼎鼎的John,英国冠军啊!造机那是相当的有实力啊~可以说是职业造机器人的吧~ 进入正题,我们来学习一下Beta,这台凿击格斗机器人。  (视频第16分钟左右开始) 首先我们来看一下这台机器人的武器主框架结构,显然是两块20mm左右厚度的高强度铝合金的板材,数控CNC铣出来的。同时这两块武器主框架负责固定武器电机,定位已经计算好的减速齿轮轴,还有固定最上面的重锤摆杆轴。经过一系列的减速齿轮传动,将最终的减速齿轮同步连接一个链轮,最后再通过这个链轮上面的链条拉动上面的重锤,实现击打攻击。其实这两块武器主框架均采用了镂空结构,目的很明显,当然就是减轻机器人重量。但是!这个镂空的好坏,其实是需要单独对这个零件进行模拟分析的,比如说哪个部位受力要求高,哪个地方可能就需要加固!相反,哪个部位受力不大,仅是一般的固定作用,那其实就可以完全镂空!当然其实这个零件比较有代表性,我们注意到,凡是零件外围,虽然有镂空,但确是挖掉一定的深度,比如说只有15mm,那么其实这刚好就是刚才说的两种情况一个折中的做法,即比完全镂空要好,又比完全不镂空要轻!这个方法其实在传统零件设计上面几乎工程师都会使用的,所以大家以后如果设计机器人,先不说机器人造得好看不好看,如果使用了数控cnc铣掉一些材料做镂空设计,然后再适当增加一些圆角和倒角,连专业的人都会对你竖起大拇指! 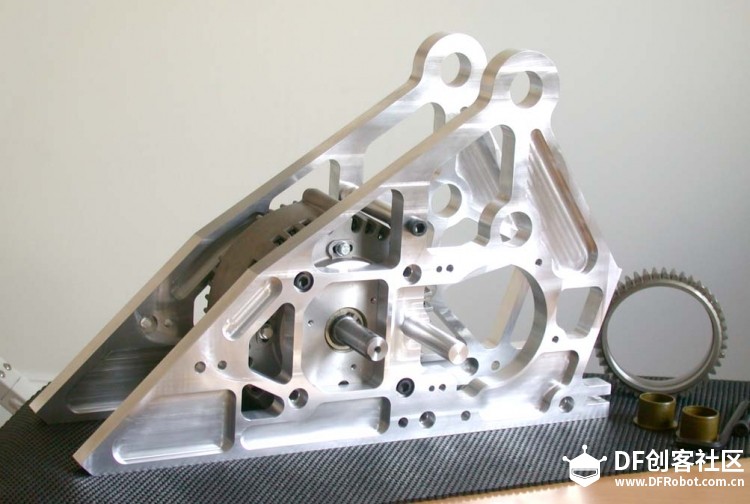 其次我们看到下面,这个机器人的框架构成,其实四段式拼接,中间两个武器固定框架,两侧分别是机器人行驶系统固定框架,可能还有一些其他功能的外拓,比如缓冲护甲。但是这个四段式框架连接如果之间的支撑设计不恰当,会导致结构不稳定,千万不能单纯的以单一平面结构进行连接,务必加上另外一个维度的结构支撑,所以我们看到顶部,其实是有两根斜向上支撑的加强支架的,这目的就是为了加强机器人的整体刚性。  刚才说到,它的武器是重锤,谁能知道这个重锤的威力是怎么来的? 好吧,我又自问自答~之前我们说过,旋转武器的威力来自于重量和速度,这个其实也是一样的,他虽然是凿击,但你仔细看他其实就是旋转机构,只不过他可能只旋转230度左右,并不会连续旋转!那么问题就简单了,重力肯定不用说,就是把锤子做得重一点吗!但这个速度怎么来呢?速度自然来自于电机和刚才说的齿轮传动!但是这个速度必须说实话肯定是越快越好,但是会有一个效率转换的问题,就是说设计速度必须适配能够带起这个重锤所需要的力矩!怎么感觉这句话还是有些难理解,我再通俗一点,就是说你速度太快,带不起来,电机可能产生不了高速所需要的力矩,所以就卡在那了,这是比较极端的!另外一种,就是说你最终输出的力矩很大,能够带起这个重锤,但速度又不够了!所以说这个问题,核心是这个摆臂结构,能够以多大的速度带动多少重量的重锤。这里面其实很多的变量,都直接影响这个效率问题,比如:重锤的质量、摆杆的长度、齿轮减速比、电机转速、电机输出扭矩。说实话,因为我不是这种机型的建造者,但以我的个人经验,这个重锤的速度在每分钟100转左右。从另外一个角度来看,我们来数一下齿轮和链轮的个数,加上电机的轴就是五个轴,也就是四级的减速比可能性,但仔细看,最后一级的两个链轮其实直径差不多,其实可以就忽略这一级减速比。如果大家如果不嫌累的话,甚至可以根据这张照片,数出来每一个齿轮的个数,看不到的当然数不出来,但是大致可以计算出每一级的减速比,乘一乘就算出来最终的减速比了。而且从之前看过的比赛视频,加上英国人造机器人的水平,他们应该使用的是超大功率对的无刷电机。这个是我个人猜的,哈哈  这里其实我还发现了一个细节,就是我们注意看这个连接武器的两个链轮(其实不是链轮,但承担链轮的作用),是通过两根粗链条进行连接的,这个谁有知道是为什么?希望后面进行回复一下,也让我知道下。 但是,其实刚才第二张图,桌子的右边放着一个齿轮环,我刚看到的时候还在想弄个齿轮环是做什么用的?但现在结合武器撞击对方机器人身上的瞬间,武器电机带动一系列的减速齿轮所产生的惯性,会使得这个链条断裂,大大影响武器系统的稳定性。但还记得我们讲横转武器电机上面的扭力限制器么?这个大齿环其实就充当这个扭力限制器,或者说是一个离合器。目的呢,很简单,其实就是保护武器系统啦,打到别人自己不要坏掉吗!但说实话目前资料有限,我也没见过这台机器人的真机,还不知道这个离合器的结构如何,我是听好奇的!  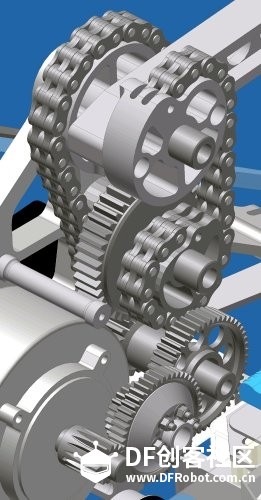 好,我们再来看几张图,这个估计是他们建模软件的设计图。从这里,我们大概可以看出一些什么东东呢?首先电池,大概是18650电芯做的电池包,其次两侧有缓冲护甲,机器人的右侧,是电气系统,均有独立的外壳作为保护。但机器人的后部有两个大功率无刷电机,说实话是用来做什么的我也真不知道!但我查找了一下它的比赛视频,并没有看到这个设计,还挺奇怪的。 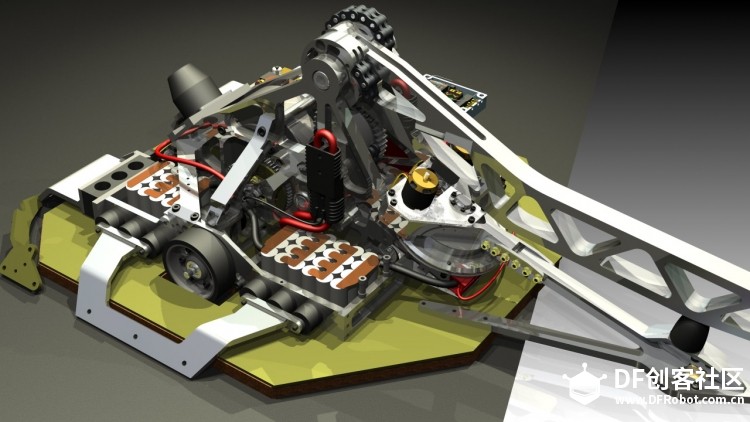  最后,我们来看看john大大造的小Beta吧,哈哈 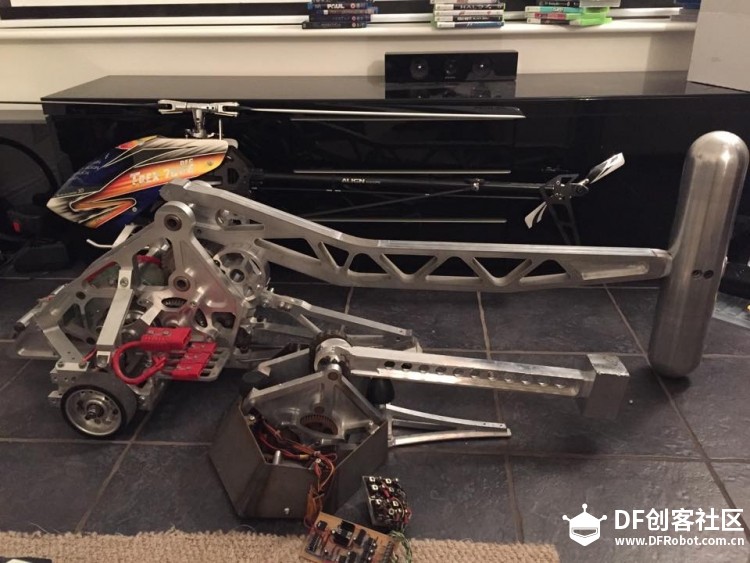 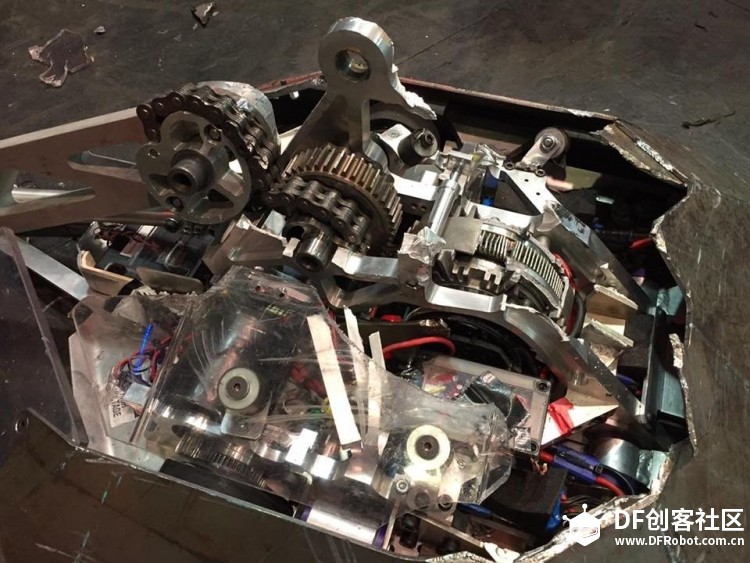 我个人真的相当佩服John大大的,其实现在想起来挺后悔没有多跟他接触接触的,多从他身上学习一些知识,诶,相当后悔!!! 建造难度:☆☆☆☆☆ 操控难度:☆☆☆☆☆ 攻击力:☆☆☆ 防御:☆☆☆☆ |
本帖最后由 swanglei 于 2018-1-21 11:44 编辑   今天我来讲的是一台标准的竖转类型的格斗机器人,witch doctor。这台机器人也算是明星机器人吧!Battlebots也同样给它出了同款的mini版机器人玩具!首先我先来简单介绍下这台机器人的特点。刚才说了,这台机器人是标准的竖转类型格斗机器人,武器为顶部高速旋转的weapon bar。其次这台机器人采用四轮两驱的行使方式,也就是常规的主动力轮位于机器人的后方,并且由链条进行传动。机器人的防御方面呢,只有机器人的正前方,有个超厚的钢板作为机器人的前装甲,机器人的侧边,也就是轮子是没有任何的保护的。  我们来看一下它的主武器,它的这个高速转锤是属于异型结构,相对传统的以轴为对称中心结构的转锤相比,它这种结构在撞击的时候能够产生更大的惯性。这就增大了这个武器在设计时候的难度,传统的轴对称解构重心肯定是直接落在旋转中心上的,然而这种异型结构还需要严格的检查轴两侧的重量是否一致,必须严格的把控武器的动平衡。 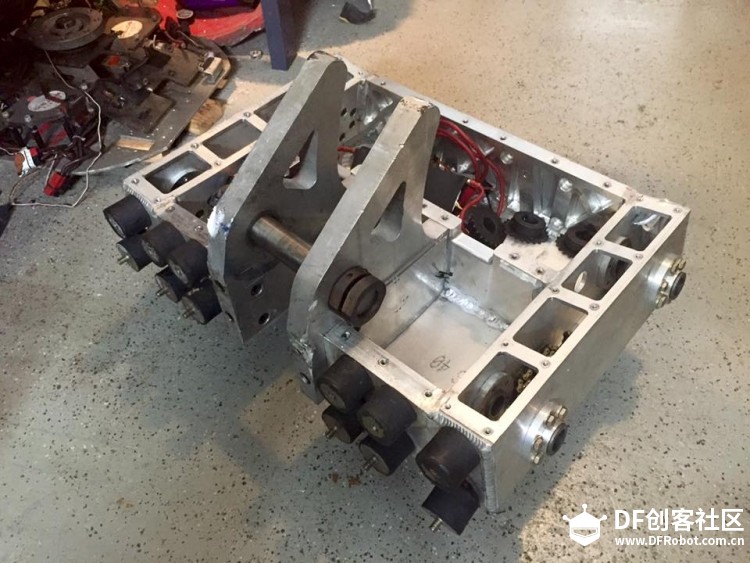 我们再来看一下这一张图,其实这台机器人的结构被设计得相当之紧凑,这就意味着机体结构强度相当之高。机器人的两侧的前后轮传动链条箱,也几乎是全封闭结构,而且四个轮子全部安装好前面两个轮子几乎是不会受到攻击的,因为前轮有前面的装甲所保护住。所以这就意味着这台机器人其实最大的弱点就是它的后轮,它的主动力轮,一旦其中一个主动力轮若是受到攻击,机器人就完全丧失了一侧的动力。再看看前面的装甲结构,首先前铲装甲后面是有12个缓冲螺母所固定的,这能大大的吸收掉与重型武器产生撞击带来的冲击力,保护整台机器人。其实再有一场比赛当中,记得好像是16年的battlebots比赛第一季半决赛,他与墓碑的比赛当中,差一点点就赢了墓碑,它的这个前装甲使它避免了好几次撞击的威胁。而且那场比赛也打得墓碑挺惨的,大家都是命悬一线,最后,witch doctor因为机体翻转无法复位才输了比赛。  从这一张图主要可以看到它内部的行驶传动系统,电机应该是ampflow的减速电机,前后轮使用链条进行传动。我们注意到witch doctor的前后轮距较近,两侧的间距较大,这在我之前的文章有分析到,这样的轮距分配,有是介于两个轮子的高灵活性以及标准四个轮子的稳定性之间的方法,也就是说它没有两个轮子灵活,但是又比以大概呈正方形分布的四个轮子灵活,而且稳定性又比两个轮子的要好很多很多。无论是操控还是灵活性,总体评分都是相当高的。其实这也就解释了为什么这台机器人是没有轮子的装甲,因为这台机器人的防御就是他的攻击,机器人的命完全就掌握在操控员的手里,操控员操作得6,机器人就不用防御,就是进攻。 另外我自己有个小问题,就是大家都知道竖转机器人是有复位的这个问题的,我并没有看到witch doctor能够通过武器的陀螺效应翻转过来的,不知道有木有人愿意出来解释一下。我自己个人的看法是这样的,武器固定座顶部是高于武器的旋转半径的,在翻到的过程当中是不影响武器的旋转的。当机器人翻转过来的时候,武器固定座充当了机器人的另外一个前支点,因为后面的两个轮子仍然是着地的,武器的旋转又不影响,所以机器人即使翻转过来还是可以行走的,只不过就是有点怪而已。  建造难度:☆ 操控难度:☆ 攻击力:☆☆☆☆ 防御:☆☆ |
|
这个破坏力.................... 讲那个“神鞭”的东西安到车上会是什么样? 就是那个令人望而生畏的鞭子,帮个锯子的东西................ |
swanglei 发表于 2018-1-14 20:52 如果高速旋转的“武器”太大,或太重,那车岂不是会飞出去  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖






