|
12392| 2
|
[建造日志] 液压系统基础 |

|
液压系统基础 此文章为入门如果想了解更多液压系统请阅读专业书籍 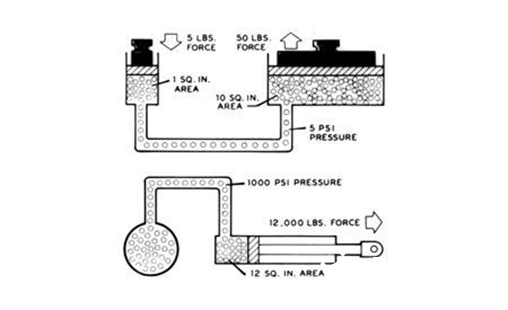 LBS磅 IN.AREA平方英尺 PSI帕斯卡 Force力 帕斯卡定理是液压系统运行的基本原则,它指出,不可压缩静止流体中任一点受外力产生压力增值后,此压力增值瞬时间传至静止流体各点。这个定理允许我们用较小的力产生很大的里。如图左侧5磅的力施加在一平方英尺的平面可以产生5psi的压力。这5psi的压力在右侧又能产生50磅的力 静态的环境下液压缸能产生的力取决于缸径和压力(外界约束缸的移动才会测得力)。在缸径12平方英寸的液压缸(4‘‘直径左右)施加1000psi压力可以输出12000榜的力。气缸移动的速度取决于流量(gpm加仑每分钟)和缸径。如果液压泵能提供1gpm,气缸的移动速度是20in/min 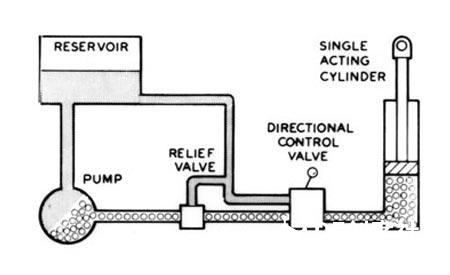 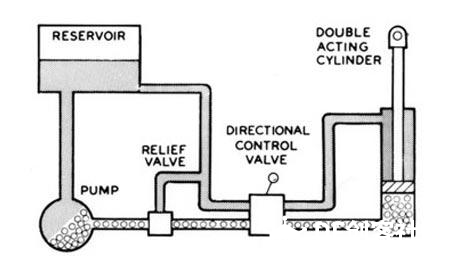 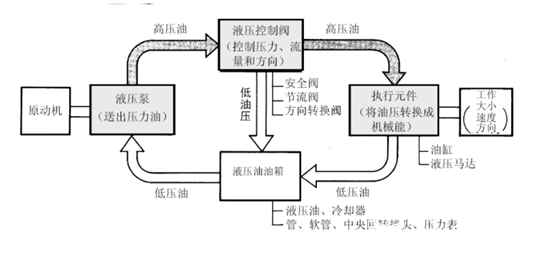 基本零件如图 原动机可以是电机,人力,内燃机等等。油泵提供输出端的压力和流量。液压油通过耐高压管道达到控制阀。控制阀将液压油导向执行原件或回到油箱 控制方式 此处只描述在遥控模型/机器人方面的基本控制原理。液压控制阀通常为三位三通(图1):空挡 上升 下降 ,高压输入高压输出低压输出。三位四通(图2):高压输入 高压输出1 高压输出2 低压输出 1. 空挡:来自泵的油直接被导回油箱,液压缸内和管道没有高压,外部可以随意推动液压缸(取决于阀的设计)。因为是空挡所以会有指令告诉电机停止运行或者低功率运行以节省能量浪费减小系统温度,不过一直运行也不会有大问题因为电机基本处于空转,并且这样能加快响应速度。 2. 上升:控制阀将来自泵的液体导入油缸,电机根据阀的位置加快转速。外界给油缸施加阻力导致管道压力加大,大到一定程度安全阀开始起作用将液体导入油箱以减小管道压力。 3. 下降:图一油缸的复位将有外界机械力完成:弹簧或负载等,图二由液压完成,控制阀将油导入高压输出阀2. 例子: 请自己带梯子 Youtuber:Erik79  应用: Crusher bot, lifter,clamper 此处不会过多解析 液压系统是格斗机器人上最不常见的系统之一,因为涉及到大量液体,能量传递效率,能力释放时间,精密度,费用,重量体积,抗震,加工难度,规则限制。不过帅高过一切嘛 Crusher的液压缸通常会大缸径短行程已获得最大输出力量 Lifter会用长形成小缸径以获得长距离输出 通常使用连杆结构输出,气缸底座通常是铰链链接   选购 市面上量产的小型高压液压泵很少,大多数液压系统需要自制或从别地方改装,管道和接口会是国标 某12v液压泵带控制器  技术参数: *油箱:八夸脱 *水库:塑料罐 *液压泵排量:0.825GPM *电压:DC 12V-DV 24V *双向动力 *电机功率:0.8-3千瓦 B端口1500 Psi最大压力 *A端口(上升)3200 Psi最大压力 *适用范围:自卸车,卸车,起重机,起重机等 重量32磅 此产品直接拿来用的话只能当作玩具,需要完全改装。能用的只有油箱油泵管线控制阀 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 老版主限定
老版主限定









