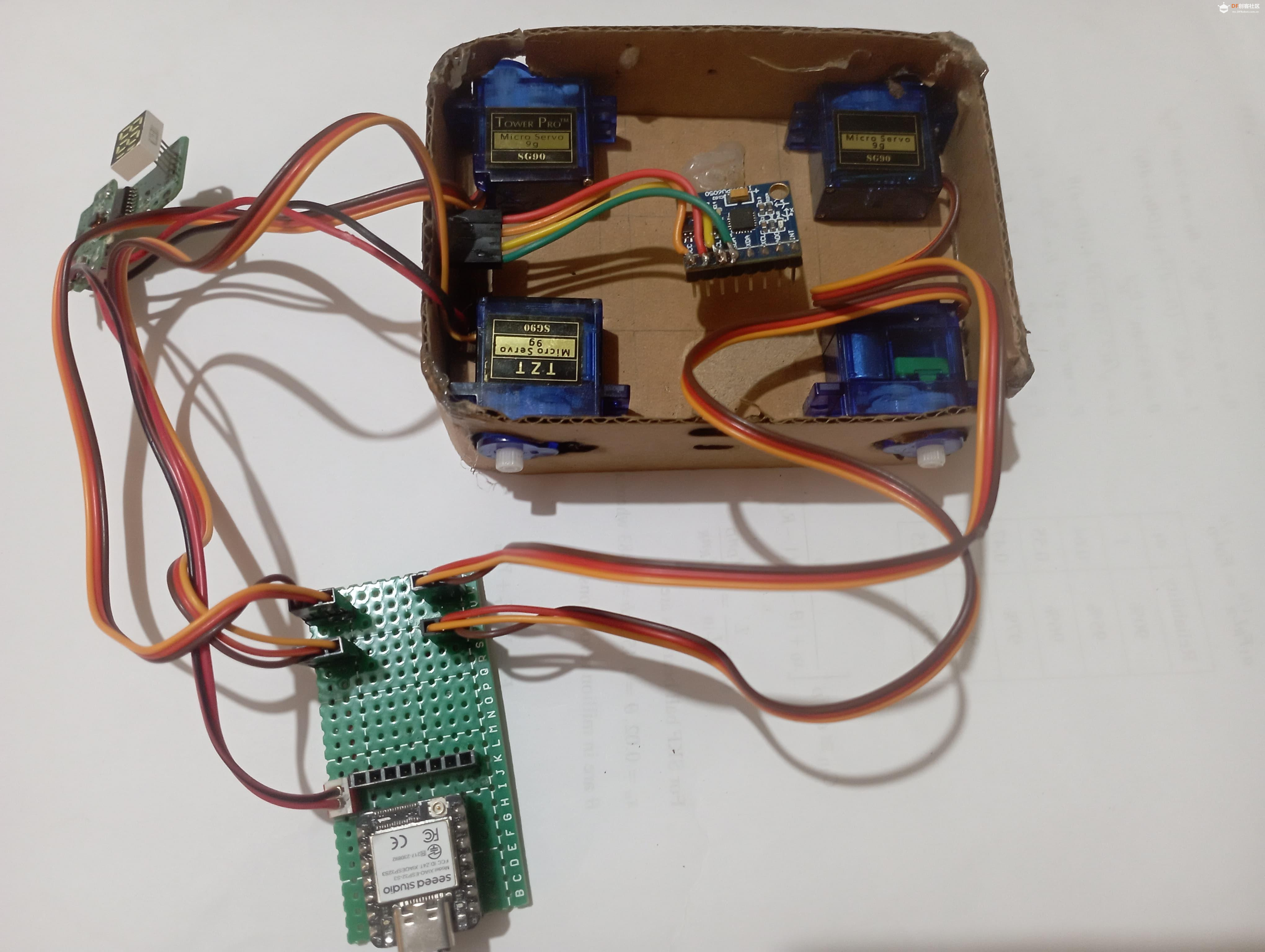
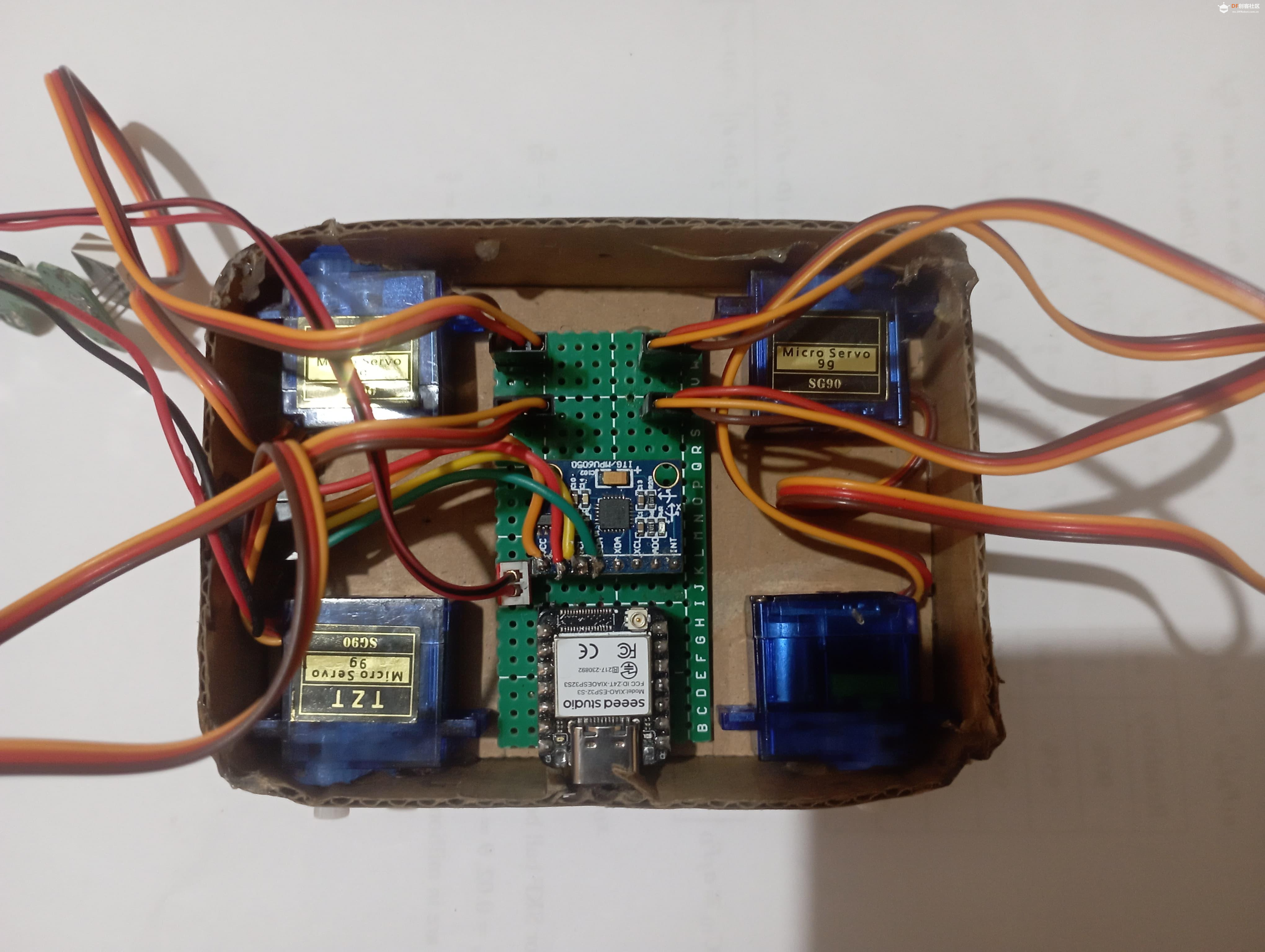
项目代码
- #include <ESP32Servo.h>
- #include <Wire.h>
- #include <Adafruit_MPU6050.h>
- #include <Adafruit_Sensor.h>
- #include "expressions.h"
-
- #define SCREEN_WIDTH 128
- #define SCREEN_HEIGHT 64
- #define OLED_RESET -1
- #define TAP_THRESHOLD 1 // Adjust based on testing
- #define TAP_WINDOW 500 // Time window for double tap (ms)
-
- Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
- Adafruit_MPU6050 mpu;
-
- // Servo objects and pins
- Servo frontLeftServo;
- Servo frontRightServo;
- Servo backLeftServo;
- Servo backRightServo;
-
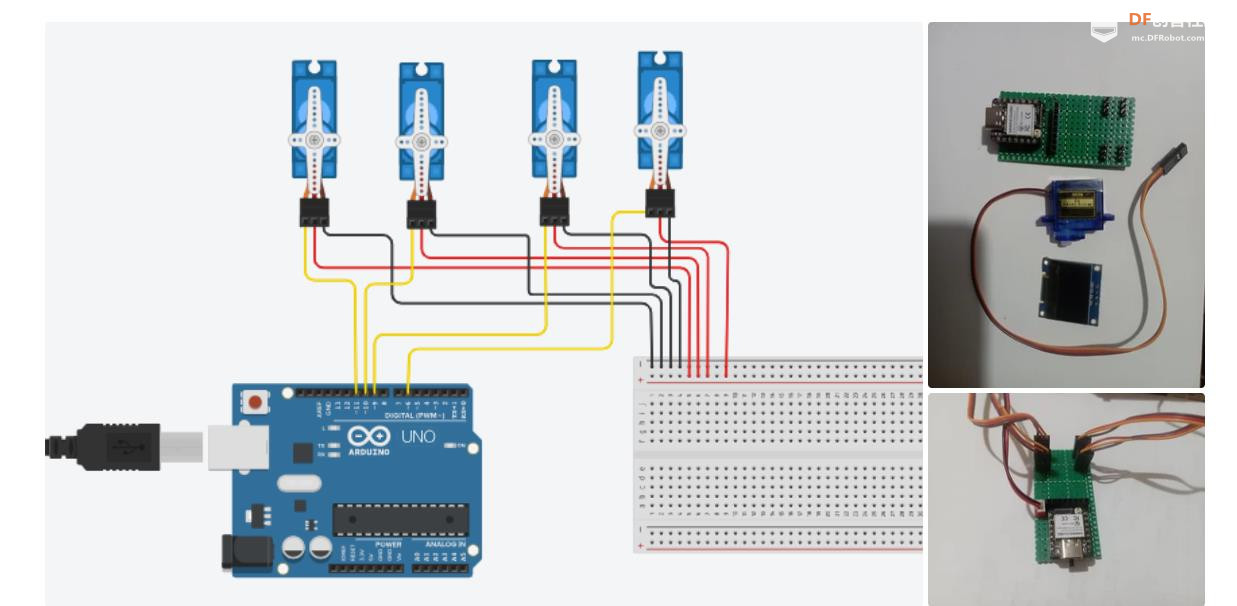
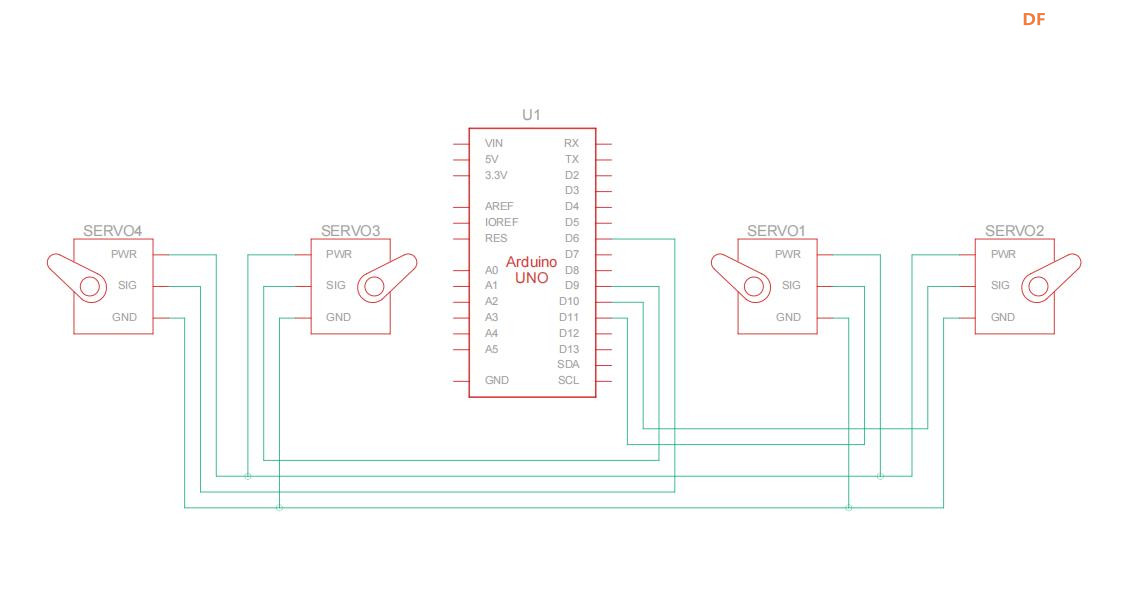
- const int frontLeftPin = D0;
- const int frontRightPin = D1;
- const int backLeftPin = D2;
- const int backRightPin = D3;
-
- // State definitions
- enum RobotState {
- SLEEPING,
- ACTIVE,
- UPSIDE_DOWN
- };
-
- // Servo angles
- const int standAngle = 90;
- const int sleepAngle = 0;
- const int forwardStep = 60;
- const int backwardStep = 150;
- const int sitAngle = 20;
- const int danceAngle1 = 60;
- const int danceAngle2 = 120;
-
- // Global variables
- RobotState currentState = SLEEPING;
- unsigned long lastTapTime = 0;
- int tapCount = 0;
- int delay_time = 200;
- bool isUpright = true;
- unsigned long lastActionTime = 0;
- const unsigned long IDLE_TIMEOUT = 30000; // 30 seconds before sleeping
-
- void setup() {
- Serial.begin(115200);
-
- // Initialize display
- if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) {
- Serial.println(F("SSD1306 allocation failed"));
- for(;;);
- }
-
- // Show boot animation
- showBootAnimation();
-
- // Initialize servos
- frontLeftServo.attach(frontLeftPin);
- frontRightServo.attach(frontRightPin);
- backLeftServo.attach(backLeftPin);
- backRightServo.attach(backRightPin);
-
- // Initialize MPU6050
- initializeMPU();
-
- mpu.setHighPassFilter(MPU6050_HIGHPASS_0_63_HZ);
- mpu.setMotionDetectionThreshold(9);
- mpu.setMotionDetectionDuration(20);
- mpu.setInterruptPinLatch(true); // Keep it latched. Will turn off when reinitialized.
- mpu.setInterruptPinPolarity(true);
- mpu.setMotionInterrupt(true);
-
- stand();
- delay(1000);
- // Start in sleeping position
- sleep();
- sleepy();
- }
-
- void showBootAnimation() {
- display.clearDisplay();
- display.setTextSize(2);
- display.setTextColor(WHITE);
-
- // Fade in effect
- for(int i = 0; i < 255; i += 51) {
- display.clearDisplay();
- display.setTextColor(WHITE);
- display.setCursor(35, 25);
- display.println("TN 24");
- display.display();
- delay(100);
- }
- delay(1000);
- display.clearDisplay();
- display.display();
- }
-
- void loop() {
- checkOrientation();
- checkTaps();
-
- switch(currentState) {
- case SLEEPING:
- handleSleepingState();
- break;
-
- case ACTIVE:
- handleActiveState();
- break;
-
- case UPSIDE_DOWN:
- handleUpsideDownState();
- break;
- }
- }
-
- void checkTaps() {
- sensors_event_t a, g, temp;
- mpu.getEvent(&a, &g, &temp);
-
- // float acceleration = sqrt(sq(a.acceleration.x) + sq(a.acceleration.y) + sq(a.acceleration.z));
- // Serial.println(acceleration);
-
- if(mpu.getMotionInterruptStatus()) {
- unsigned long currentTime = millis();
- Serial.println("Tap");
-
-
- tapCount++;
-
- if (tapCount == 2) { // Double tap detected
- Serial.println("Double Tap");
- if (currentState == SLEEPING) {
- wakeUp();
- }
- tapCount = 0;
- }
-
- lastTapTime = currentTime;
- }
- }
-
- void handleSleepingState() {
- sleepy();
- if (millis() - lastActionTime > 5000) {
- // Occasionally show sleeping animation
- if (random(100) < 10) {
- for (int i = 0; i < 3; i++) {
- dizzy();
- delay(500);
- }
- }
- }
- }
-
- void handleActiveState() {
- // Check if idle for too long
- if (millis() - lastActionTime > IDLE_TIMEOUT) {
- goToSleep();
- return;
- }
-
-
-
- mischievous();
- walkForward();
- delay(1000);
-
- cute();
- dance();
- delay(1000);
-
- wink();
- react();
- delay(1000);
-
- thinking();
- sit();
- delay(1000);
-
- sleep();
- mischievous();
- delay(1000);
-
- stand();
- love();
- delay(1000);
-
-
- play();
- mischievous();
- delay(1000);
-
-
- // Random playful behaviors
- // int action = random(100);
- // if (action < 20) {
- // mischievous();
- // walkForward();
- // } else if (action < 40) {
- // cute();
- // dance();
- // } else if (action < 60) {
- // wink();
- // react();
- // } else if (action < 80) {
- // thinking();
- // sit();
- // delay(1000);
- // stand();
- // } else {
- // love();
- // play();
- // }
-
- lastActionTime = millis();
- }
-
- void handleUpsideDownState() {
- static unsigned long lastUpsideDownAction = 0;
- const unsigned long ACTION_INTERVAL = 1000;
-
- if (millis() - lastUpsideDownAction > ACTION_INTERVAL) {
- crying();
- panicMovement();
- lastUpsideDownAction = millis();
- }
- }
-
- void panicMovement() {
- // Random panicked leg movements
- for (int i = 0; i < 4; i++) {
- frontLeftServo.write(random(0, 180));
- frontRightServo.write(random(0, 180));
- backLeftServo.write(random(0, 180));
- backRightServo.write(random(0, 180));
- delay(200);
- }
- stand(); // Try to return to standing position
- }
-
- void wakeUp() {
- currentState = ACTIVE;
- happy();
- for (int angle = sleepAngle; angle <= standAngle; angle += 5) {
- frontLeftServo.write(angle);
- frontRightServo.write(angle);
- backLeftServo.write(angle);
- backRightServo.write(angle);
- delay(20);
- }
- lastActionTime = millis();
- }
-
- void goToSleep() {
- currentState = SLEEPING;
- sleepy();
- for (int angle = standAngle; angle >= sleepAngle; angle -= 5) {
- frontLeftServo.write(angle);
- frontRightServo.write(180 - angle);
- backLeftServo.write(180);
- backRightServo.write(angle);
- delay(20);
- }
- }
-
- void checkOrientation() {
- sensors_event_t a, g, temp;
- mpu.getEvent(&a, &g, &temp);
-
- float zAcceleration = a.acceleration.z;
- bool wasUpright = isUpright;
- isUpright = zAcceleration > 1.0;
-
- if (!isUpright && wasUpright) {
- currentState = UPSIDE_DOWN;
- crying();
- } else if (isUpright && !wasUpright) {
- currentState = ACTIVE;
- happy();
- }
- }
-
- void initializeMPU() {
- if (!mpu.begin()) {
- Serial.println("Failed to find MPU6050 chip!");
- while (1) delay(10);
- }
-
- mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
- mpu.setGyroRange(MPU6050_RANGE_500_DEG);
- mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
- delay(100);
- }
-
- void selfRight() {
- Serial.println("Attempting to self-right...");
- // Add logic to try returning to upright position
- frontLeftServo.write(sleepAngle);
- frontRightServo.write(180 - sleepAngle); // Inverted for the right side
- backLeftServo.write(180);
- backRightServo.write(sleepAngle); // Inverted for the right side
- delay(delay_time);
- stand();
- delay(delay_time);
- }
-
- // Rest of the movement functions (walkForward, walkBackward, etc.) remain unchanged
- void stand() {
- frontLeftServo.write(standAngle);
- frontRightServo.write(standAngle);
- backLeftServo.write(standAngle);
- backRightServo.write(standAngle);
- }
-
- void sleep() {
- frontLeftServo.write(sleepAngle);
- frontRightServo.write(180 - sleepAngle); // Inverted for the right side
- backLeftServo.write(180);
- backRightServo.write(sleepAngle); // Inverted for the right side
- delay(1000);
- }
-
- void walkForward() {
- // Lift and move front-left and back-right legs
- frontLeftServo.write(forwardStep);
- backRightServo.write(180 - forwardStep); // Inverted for the right side
- delay(delay_time);
-
- // Reset to standing position
- frontLeftServo.write(standAngle);
- backRightServo.write(standAngle);
- delay(delay_time);
-
- // Lift and move front-right and back-left legs
- frontRightServo.write(180 - forwardStep); // Inverted for the right side
- backLeftServo.write(forwardStep);
- delay(delay_time);
-
- // Reset to standing position
- frontRightServo.write(standAngle);
- backLeftServo.write(standAngle);
- delay(delay_time);
- }
-
-
- void walkBackward() {
- // Similar to moveForward but in reverse
- frontLeftServo.write(backwardStep);
- backRightServo.write(180 - backwardStep); // Inverted for the right side
- delay(500);
-
- frontLeftServo.write(standAngle);
- backRightServo.write(standAngle);
- delay(500);
-
- frontRightServo.write(180 - backwardStep); // Inverted for the right side
- backLeftServo.write(backwardStep);
- delay(500);
-
- frontRightServo.write(standAngle);
- backLeftServo.write(standAngle);
- delay(500);
- }
-
-
- void turnLeft() {
- // Move only one side of the legs forward
- frontLeftServo.write(forwardStep);
- backLeftServo.write(forwardStep);
- delay(500);
-
- frontLeftServo.write(standAngle);
- backLeftServo.write(standAngle);
- delay(500);
- }
-
- void turnRight() {
- // Move only the other side of the legs forward
- frontRightServo.write(180 - forwardStep); // Inverted for the right side
- backRightServo.write(180 - forwardStep); // Inverted for the right side
- delay(500);
-
- frontRightServo.write(standAngle);
- backRightServo.write(standAngle);
- delay(500);
- }
-
- void sit() {
- // Set all legs to a sitting angle
- frontLeftServo.write(90);
- frontRightServo.write(90); // Inverted for the right side
- backLeftServo.write(180 - sitAngle);
- backRightServo.write(sitAngle); // Inverted for the right side
- delay(1000);
-
-
- }
-
- void dance() {
- for (int i = 0; i < 3; i++) {
- frontLeftServo.write(danceAngle1);
- backRightServo.write(180 - danceAngle1); // Inverted for the right side
- delay(200);
-
- frontRightServo.write(180 - danceAngle2); // Inverted for the right side
- backLeftServo.write(danceAngle2);
- delay(200);
-
- frontLeftServo.write(danceAngle2);
- backRightServo.write(180 - danceAngle2); // Inverted for the right side
- delay(200);
-
- frontRightServo.write(180 - danceAngle1); // Inverted for the right side
- backLeftServo.write(danceAngle1);
- delay(200);
- }
-
- // Return to standing position
- frontLeftServo.write(standAngle);
- frontRightServo.write(standAngle);
- backLeftServo.write(standAngle);
- backRightServo.write(standAngle);
- }
-
- void react() {
- frontLeftServo.write(90);
- frontRightServo.write(90); // Inverted for the right side
- backLeftServo.write(180 - sitAngle);
- backRightServo.write(sitAngle); // Inverted for the right side
- delay(1000);
-
- // Return to standing position
- stand();
- delay(500);
-
- frontLeftServo.write(sitAngle);
- frontRightServo.write(180 - sitAngle); // Inverted for the right side
- backLeftServo.write(90);
- backRightServo.write(90); // Inverted for the right side
- delay(1000);
-
- int del = 250;
- frontLeftServo.write(0);
- frontRightServo.write(160); // Inverted for the right side
- delay(del);
-
- frontLeftServo.write(20 );
- frontRightServo.write(180 ); // Inverted for the right side
- delay(del);
-
-
- frontLeftServo.write(0);
- frontRightServo.write(180 - sitAngle); // Inverted for the right side
- delay(del);
-
-
- frontLeftServo.write(sitAngle );
- frontRightServo.write(180); // Inverted for the right side
- delay(del);
-
- frontLeftServo.write(0);
- frontRightServo.write(160); // Inverted for the right side
- delay(del);
-
- frontLeftServo.write(20 );
- frontRightServo.write(180 ); // Inverted for the right side
- delay(del);
-
-
- frontLeftServo.write(0);
- frontRightServo.write(180 - sitAngle); // Inverted for the right side
- delay(del);
-
-
- frontLeftServo.write(sitAngle );
- frontRightServo.write(170); // Inverted for the right side
- delay(del);
-
- // Return to standing position
- stand();
- delay(500);
- }
-
-
- void play()
- {
- for (int i = 0; i < 3; i++) {
- frontLeftServo.write(danceAngle1);
- backRightServo.write(180 - danceAngle1); // Inverted for the right side
- delay(200);
-
- frontRightServo.write(180 - danceAngle2); // Inverted for the right side
- backLeftServo.write(danceAngle2);
- delay(200);
-
- frontLeftServo.write(danceAngle2);
- backRightServo.write(180 - danceAngle2); // Inverted for the right side
- delay(200);
-
- frontRightServo.write(180 - danceAngle1); // Inverted for the right side
- backLeftServo.write(danceAngle1);
- delay(200);
- }
-
- // Return to standing position
- frontLeftServo.write(standAngle);
- frontRightServo.write(standAngle);
- backLeftServo.write(standAngle);
- backRightServo.write(standAngle);
-
- }
| 





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






