|
2868| 0
|
[项目分享] 二哈识图2+行空板K10+IO扩展板——手势控制舵机平台 |

|
本帖最后由 云天 于 2025-9-18 11:50 编辑 【项目设计】 使用Huskylens 2进行手势识别,并通过识别结果控制多个舵机(如 S0、S3)以及在行空板K10的屏幕上显示,实现手势追踪和互动。 【项目硬件】 1.二哈识图2 AI视觉传感器(HuskyLens 2) Gravity:二哈识图2 AI视觉传感器是一款简单易用、玩法多样的AI视觉传感器,采用6TOPS算力专用AI芯片,预置人脸识别、目标检测、物体分类、姿态识别、实例分割等20余种开机即用的AI模型,同时,用户还可部署自行训练的模型,教会二哈识图识别任意目标物体。完美兼容Arduino、micro:bit、ESP32、UNIHIKER(M10、K10、)、掌控板、Raspberry Pi等主流控制器,为智能机器人、工业自动化、教育科研等多元场景提供多才多艺的视觉解决方案。  2.行空板K10 行空板K10是一款专为信息科技课程中的编程学习、物联网及AI项目教学需求而开发的学习板。它集摄像头、LCD彩屏、麦克风、扬声器、WiFi蓝牙模块、RGB指示灯及多种传感器和扩展接口于一体,无需额外设备即可实现传感器控制、物联网应用、图像检测、语音识别、语音合成等AI项目。  3.行空板K10 IO扩展板 精准拓展19路IO,4路舵机防抖动驱动,支持二哈传感器  【硬件组装】   【程序代码】
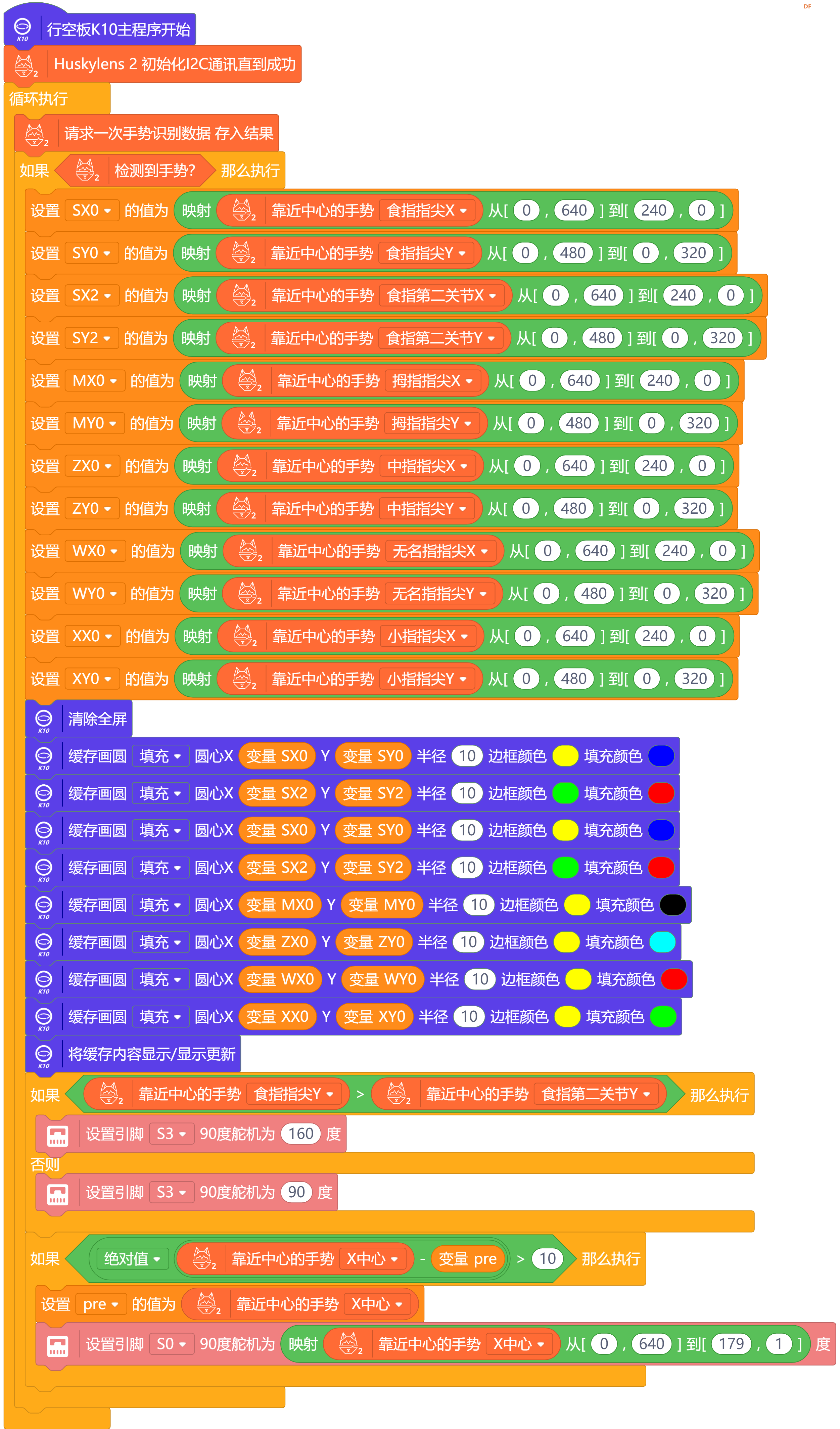 初始化 Huskylens 2 初始化 I2C 通讯,直到成功连接。 主循环逻辑 获取手势数据 请求一次手势识别数据,并存储识别结果。 识别到手势后执行以下操作: 提取关键点坐标(映射到屏幕坐标系 240x320): 食指指尖(SXO, SYO) 食指第二关节(SX2, SY2) 拇指指尖(MXO, MYO) 中指指尖(ZXO, ZYO) 无名指指尖(WXO, WYO) 小指指尖(XXO, XYO) 图形绘制: 清除全屏缓存 绘制多个填充圆,代表各个手指的关键点位置 显示更新后的图像 舵机控制逻辑: 舵机 S3: 如果食指指尖高于第二关节(可能是“抬手”或“指向”动作),设置舵机角度为 160° 否则设置为 90° 舵机 S0: 如果手势中心 X 坐标变化超过阈值(10),则根据手势中心 X 坐标映射到 0~179°,控制舵机角度 【演示视频】 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






