|
110| 6
|
[试用测评] 【花雕动手做】AI视觉二哈识图2之识别物体控制执行器 |
|
3、物体识别(Object Recognition)是计算机视觉领域中的核心技术之一,其主要目标是:让计算机或智能设备能够“看懂”图像中的物体,并准确判断其类别、位置和属性。物体识别是让机器“看懂世界”的关键一步。它是人工智能“视觉理解”的基础,广泛应用于自动驾驶、安防监控、智能机器人、图像搜索、增强现实等场景。 (1)物体识别的基本定义 物体识别是指: 通过图像处理与深度学习算法,自动识别图像或视频中存在的物体,并标注其类别(如人、车、猫)与位置(如边框、坐标)。 它不仅判断“这是什么”,还能指出“它在哪里”。 (2)物体识别的关键流程 图像采集:通过摄像头或图像文件获取视觉数据。 特征提取:分析图像中的颜色、纹理、形状、边缘等特征。 分类判断:使用训练好的模型判断物体属于哪个类别。 位置定位:标出物体在图像中的具体位置(如边框或关键点)。 结果输出:返回识别结果供系统使用或用户查看。 (3)与相关技术的区别 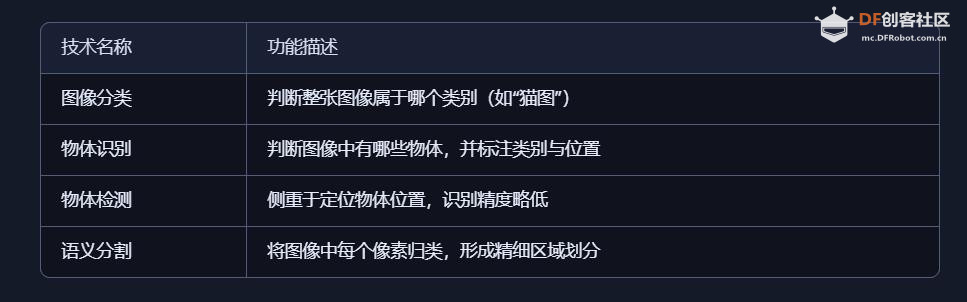 (4)应用场景举例 自动驾驶识别行人、车辆、交通标志 安防系统识别可疑人物或物品 手机相册自动分类人物、动物、风景 教育实验识别颜色球、标签、手势等 智能零售识别商品并自动结算 机器人识别目标物体并进行抓取或互动 (5)常见识别模型与算法  |
|
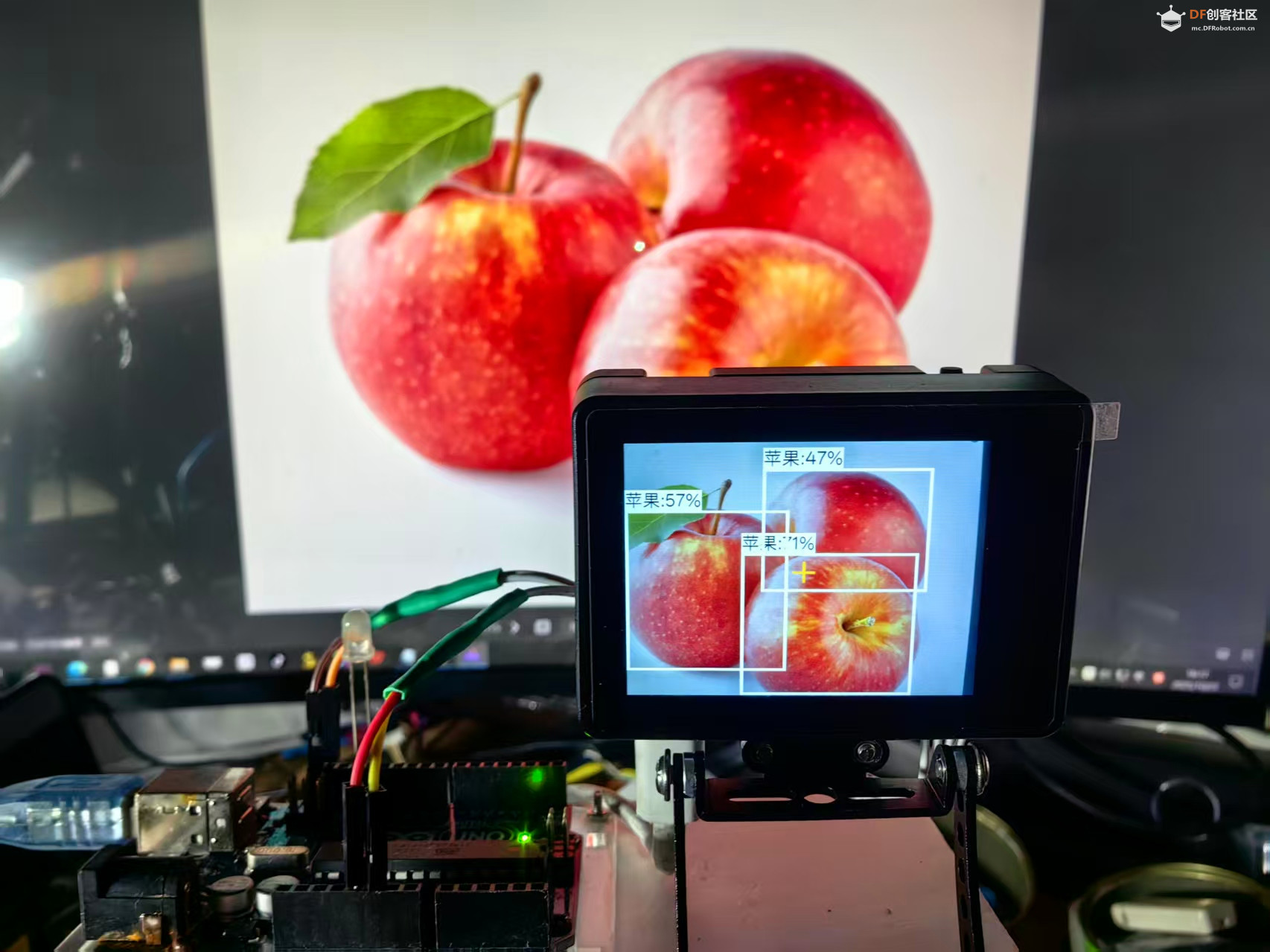
本帖最后由 驴友花雕 于 2025-10-21 15:08 编辑 4、执行器(Actuator)是一种将控制信号转换为物理动作的装置,是自动化系统和机器人中的关键部件。它的作用是根据控制系统的指令,驱动机械结构完成特定动作,如移动、旋转、推动、夹取等。 (1) 执行器的核心定义 执行器是将电信号、液压信号或气动信号转化为机械运动的装置,是“感知—决策—执行”链条中的最后一环。 (2)常见执行器类型 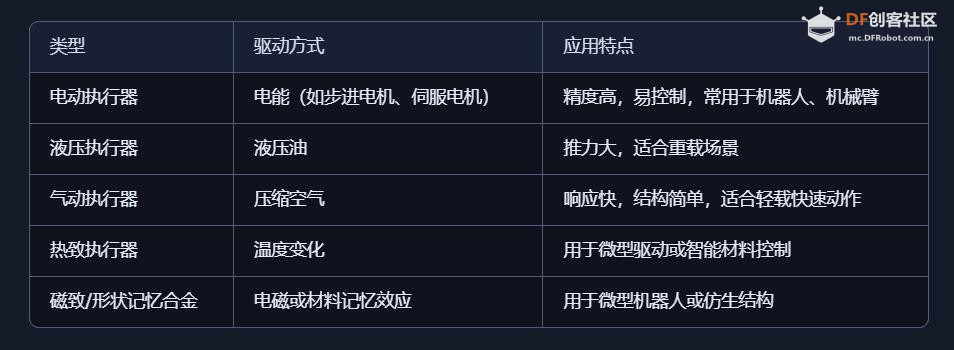 (3)执行器在系统中的作用 动作执行:如机械臂的关节旋转、轮式小车的驱动、夹爪的开合。 反馈闭环:配合传感器形成闭环控制系统,实现精准定位与动态调整。 能量转换:将控制系统的能量信号(电、气、液)转化为机械能。 接口桥梁:连接控制系统与物理世界,是“虚拟指令”落地的关键。 (4)应用场景举例 工业自动化:机器人焊接、搬运、装配 智能家居:窗帘开合、电动门锁、自动调光 航空航天:飞行器舵面控制、姿态调整 医疗设备:手术机器人、康复辅助机械 仿生机器人:模仿肌肉运动的柔性执行器 (5)使用执行器需注意事项 负载匹配:选择合适的执行器类型与规格,避免过载或性能不足 控制精度:需配合编码器、传感器实现闭环控制,提升定位与响应能力 响应速度:不同驱动方式响应时间不同,需根据任务需求选型 能耗与散热:电动执行器需考虑功率与热管理 安全机制:设置限位、急停、过载保护,防止误动作或损坏 (6)为简化测试实验,这里使用简单的执行器LED模块  5、实际测试的几个范本              |
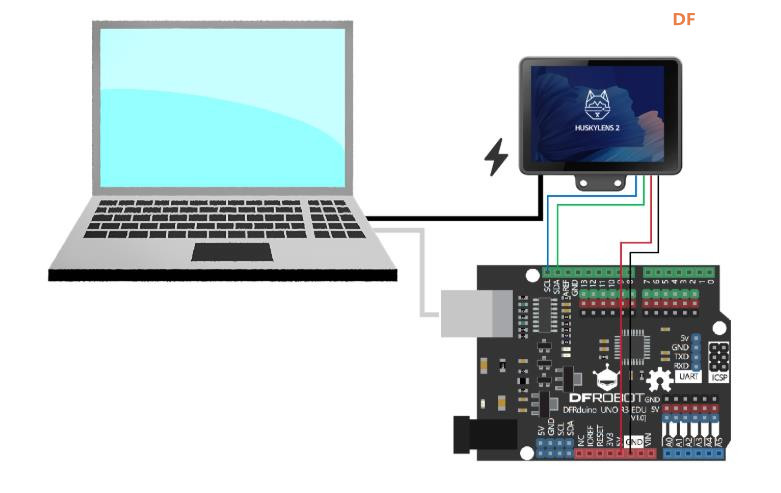
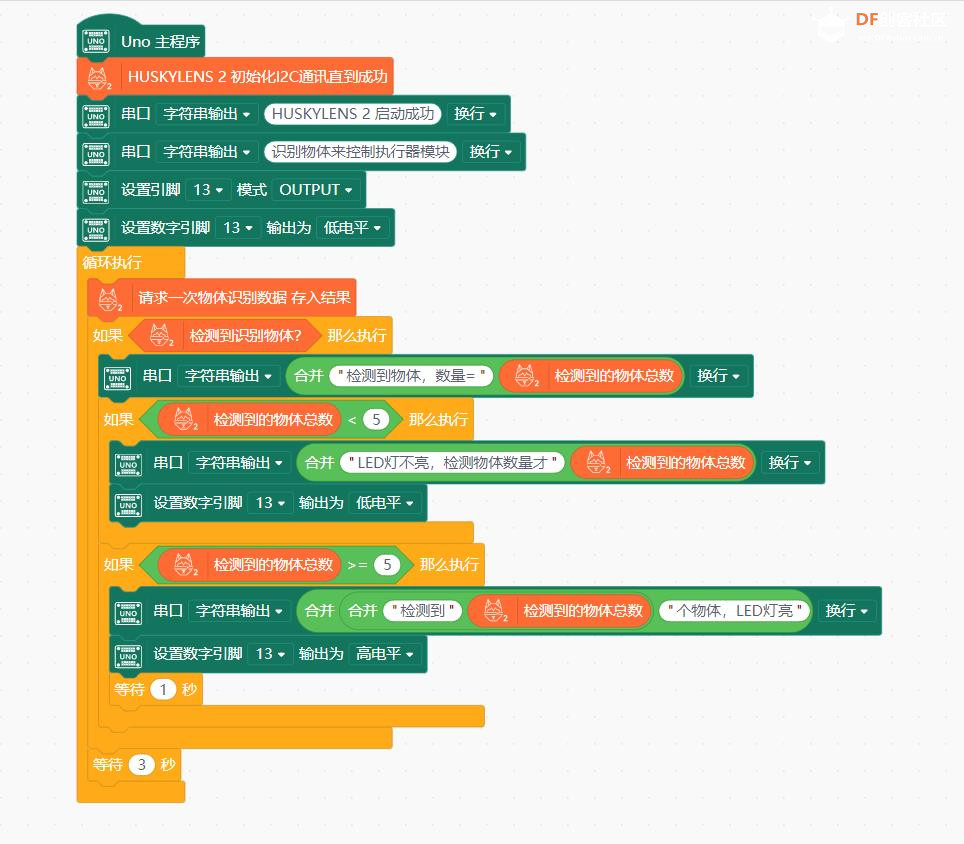
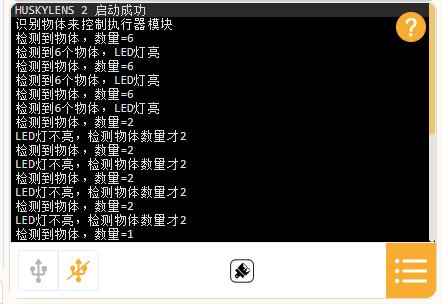
6、测试实验代码7、实际测试的代码解读 该程序使用 HUSKYLENS 2 AI 视觉传感器识别画面中的物体数量,并根据识别结果控制一个 LED 灯的亮灭状态。它是一个典型的“视觉识别 + 执行器控制”应用示例,适用于智能提示、物体计数、自动响应等场景。 模块与硬件说明 HUSKYLENS 2:AI 视觉传感器,支持物体识别、标签识别、人脸识别等功能。 Arduino Uno:主控板,用于处理识别结果并控制执行器。 LED 灯(引脚 13):作为执行器,根据识别结果亮灭。 (1)初始化部分 setup() cpp 初始化串口与 I2C 通信。 持续尝试连接 HUSKYLENS,直到成功。 设置 LED 控制引脚为输出,并初始关闭。 (2)主循环部分 loop() cpp 请求 HUSKYLENS 执行物体识别算法。 cpp 判断是否有识别结果可用。 cpp 获取识别到的物体数量并输出到串口。 (3)控制逻辑 cpp 如果识别到的物体少于 5 个,关闭 LED 灯。 cpp 如果识别到的物体达到或超过 5 个,点亮 LED 灯并保持 1 秒。 (4)节奏控制 cpp 每次识别后延迟 3 秒,避免频繁刷新,适合稳定演示。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






