|
49| 7
|
[K10项目分享] 【花雕学编程】行空板K10实际测试嵌入式 AI Agent 命令... |
|
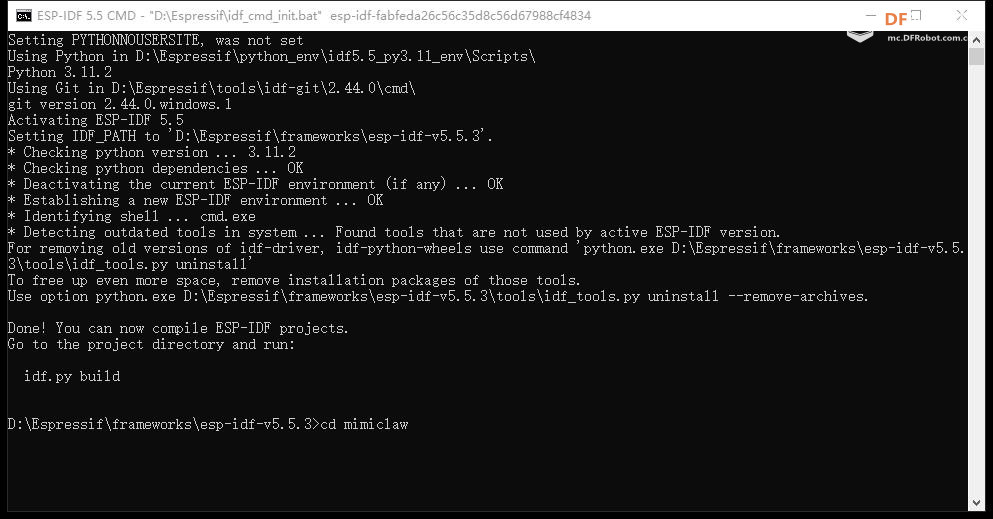
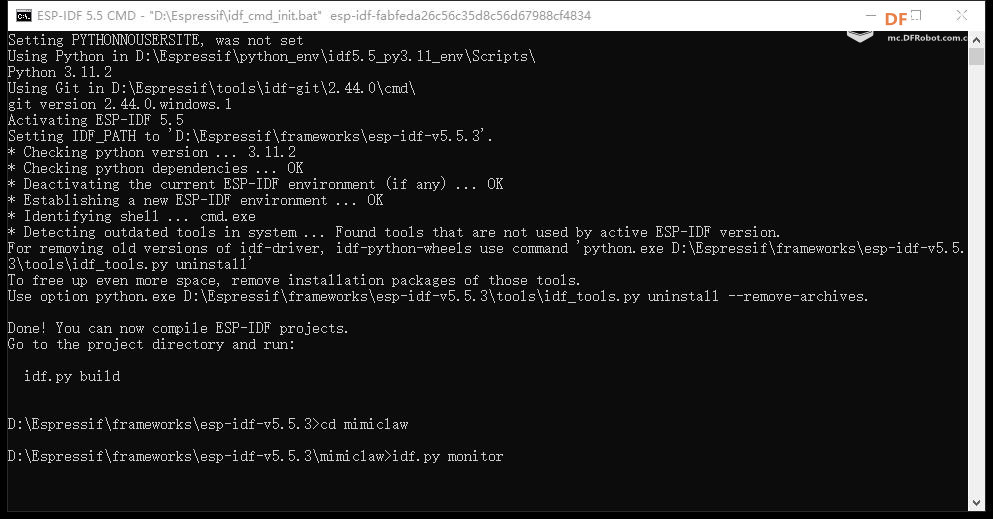
原标题 《【花雕学编程】行空板K10部署迷你小龙虾MimiClaw,实际测试嵌入式 AI Agent 命令全集》 行空板K10作为DFRobot推出的一款专为信息科技课程设计的ESP32-S3学习板,将ESP32-S3 N16R8芯片、2.8英寸彩色LCD、双麦克风、扬声器、摄像头以及丰富的板载传感器(温湿度、环境光、加速度计)集成在一张83x51.6mm的小板上。在“小龙虾”生态爆发的大背景下,将MimiClaw——这款把OpenClaw核心AI Agent架构压缩进ESP32-S3的轻量级框架——部署到行空板K10上,会擦出怎样的火花? 这里将以实际测试记录为基础,梳理MimiClaw在行空板K10上的部署要点,并逐条测试其命令全集。  |
|
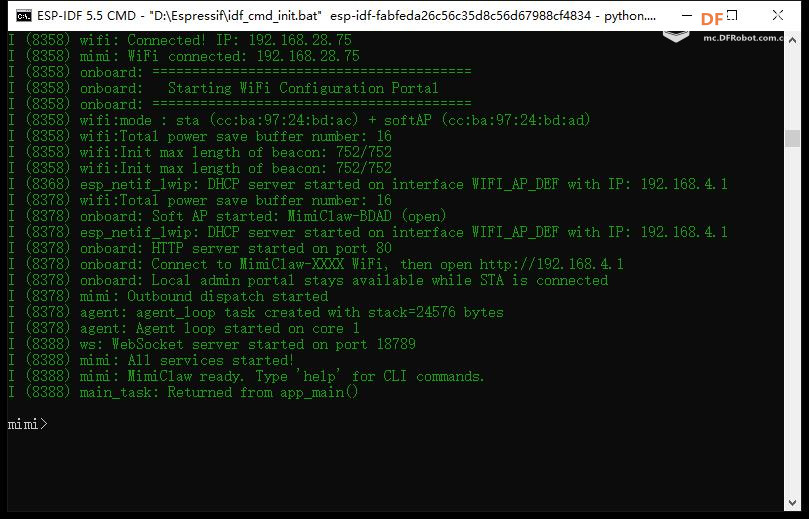
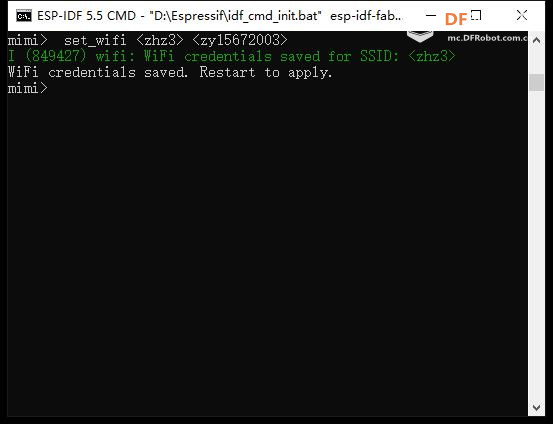
MimiClaw 核心命令体系 MimiClaw采用两层配置架构:mimi_secrets.h提供编译时的默认值,而串口CLI可在运行时动态覆盖并写入NVS Flash。其命令体系覆盖了系统管理、Wi‑Fi网络、LLM配置、飞书/Telegram机器人、记忆管理、技能调度等核心功能。这些命令使用在 mimi> 下。 1、系统基础类 (1)help / ? 列出所有命令或查看某命令详情 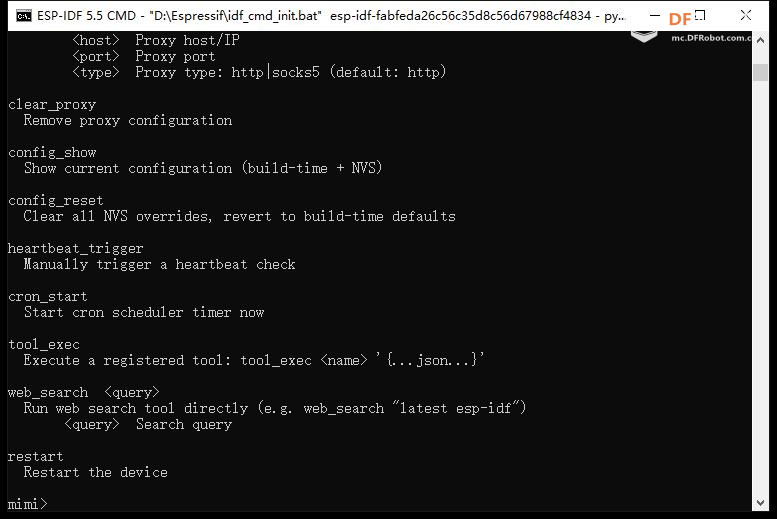 (2) restart 重启设备 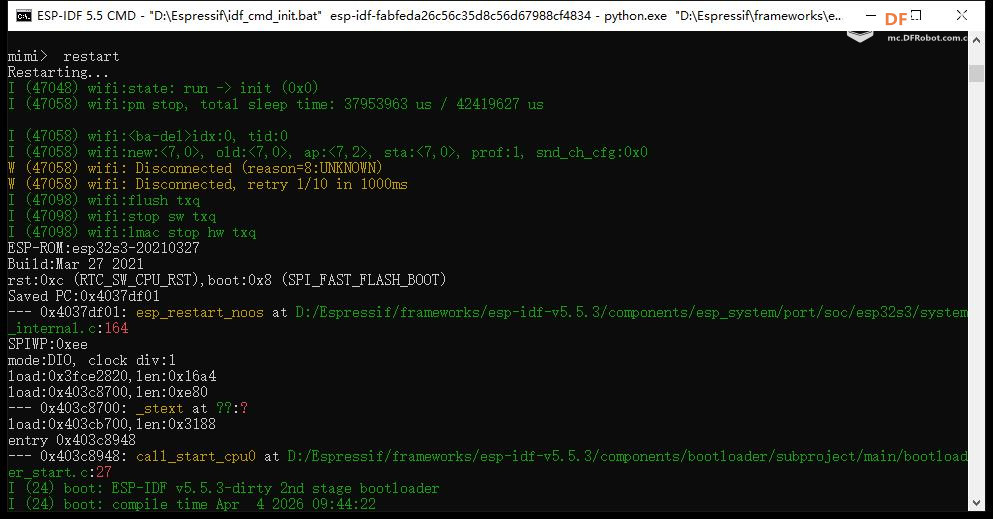 (3)heap_info 显示堆内存使用情况 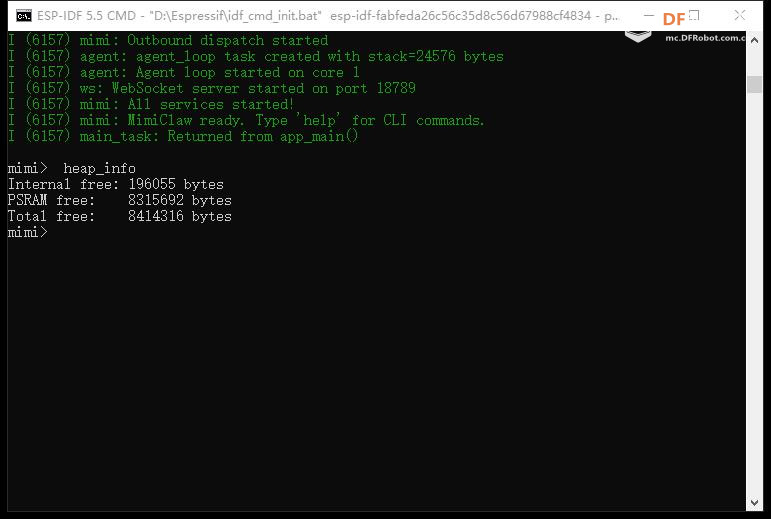 (4)config_show 显示当前所有配置 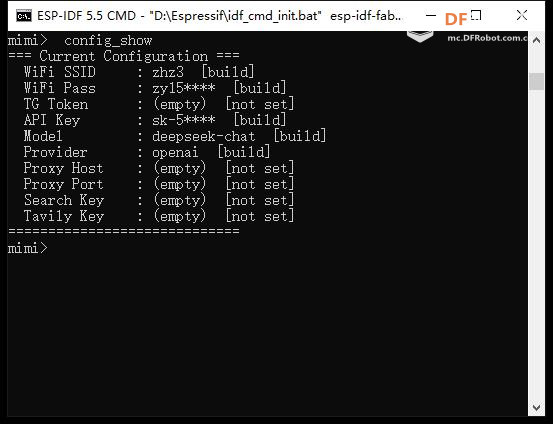 (5)config_reset 恢复出厂编译期默认值 这个没敢测试,害怕出问题。 (6)heartbeat_trigger 手动触发心跳检查 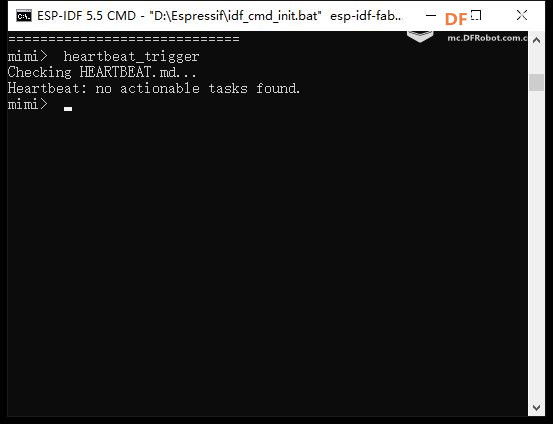 |
|
3、LLM 配置类 (1)set_api_key <key> 设置LLM API密钥 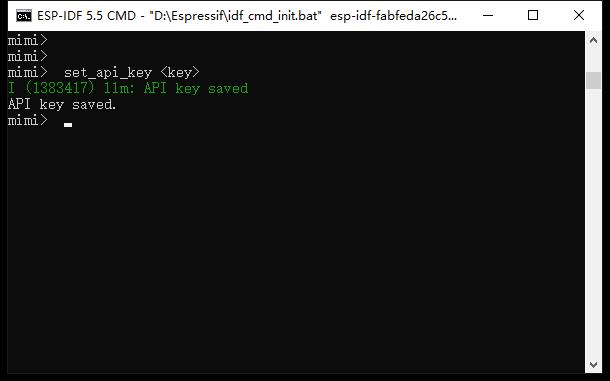 (2)set_model <model> 设置模型名称 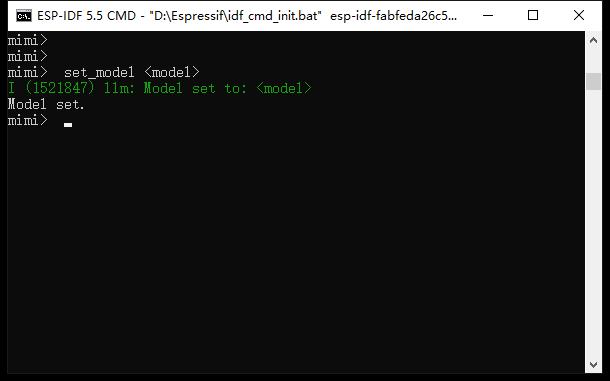 (3)set_model_provider <provider> 设置提供商(anthropic/openai) 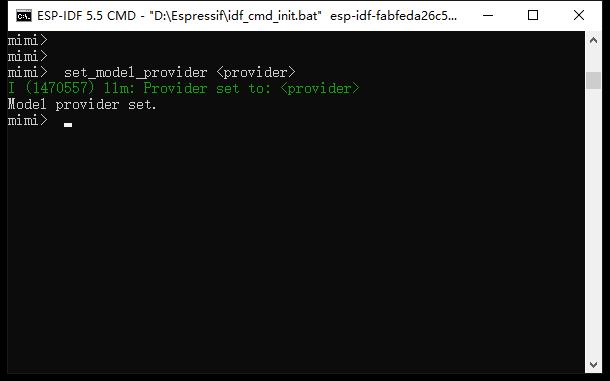 国内用户推荐DeepSeek,API地址需在mimi_config.h中修改为https://api.deepseek.com/v1/chat/completions。 4、飞书机器人 (1)set_feishu_creds <app_id> <app_secret> 设置飞书应用凭证 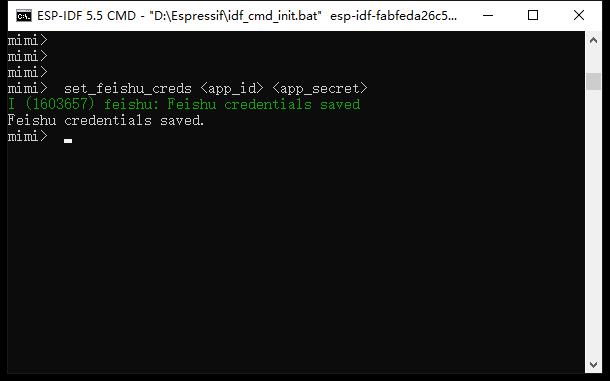 (2)feishu_send <receive_id> <text> 主动发送文本消息 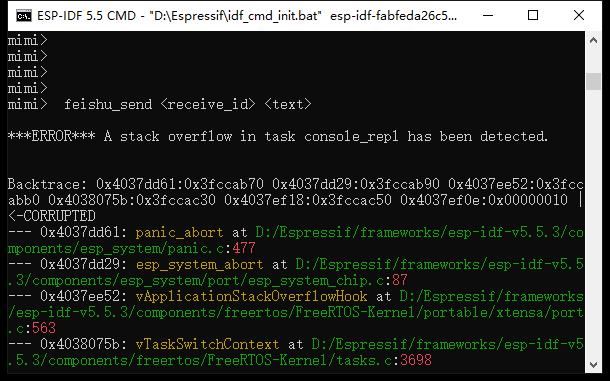 飞书采用长连接接收事件,无需公网IP,是国内开发者的首选方案。 |
|
5、记忆与技能管理 (1)memory_read 读取MEMORY.md 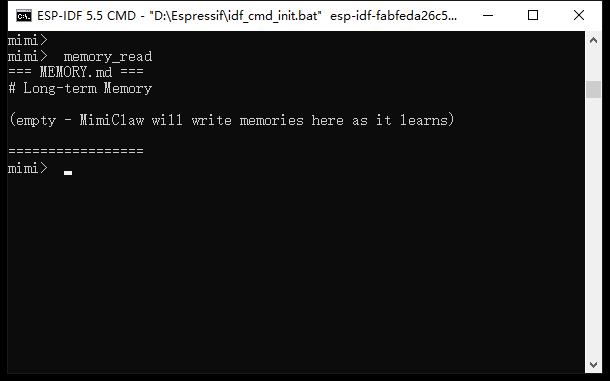 (2)memory_write <content> 写入MEMORY.md 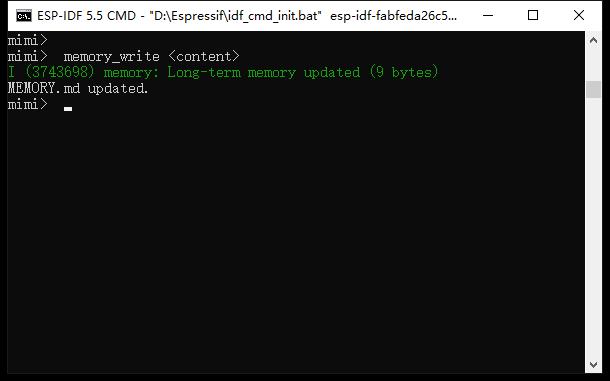 (3)skill_list 列出已安装的技能 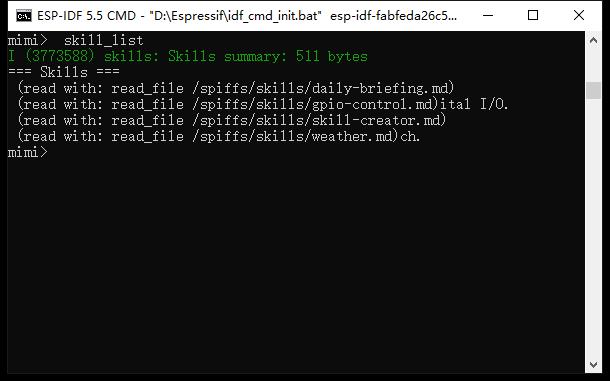 存在的技能: daily-briefing.md - 每日简报技能 gpio-control.md - GPIO控制技能 skill-creator.md - 技能创建器 weather.md - 天气查询技能 注意:输出有乱码("ital I/O." 和 "ch."),可能是日志截断或编码问题,但不影响功能。 (4)skill_show <name> 显示某个技能的内容 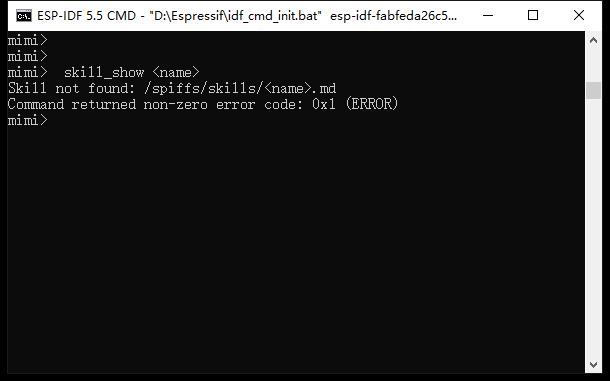 (5)skill_search <keyword> 搜索技能 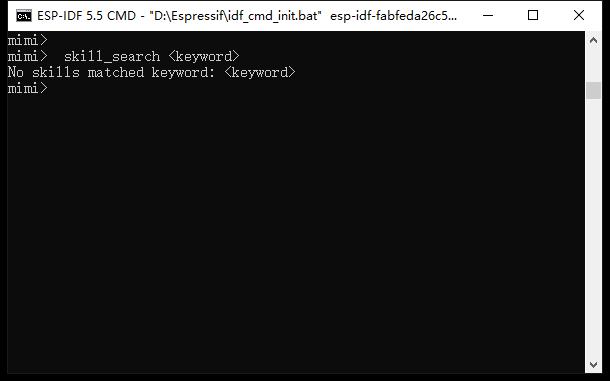 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






