|
759| 4
|
[K10项目分享] 【花雕】行空板 K10 上 MimiClaw 的开机步骤与日常命令指南 |
|
本帖最后由 驴友花雕 于 2026-4-5 10:47 编辑 原标题 《【花雕学编程】行空板 K10 + MimiClaw:开机就能用的嵌入式 AI Agent,这些 mimi 命令你必须知道》 @花雕学编程,动手又动脑 恭喜!你的行空板 K10 已经成功烧录了 MimiClaw(迷你小龙虾)固件——这意味着,一块巴掌大的开发板,现在拥有了一个 纯 C 语言实现、可对话、可记忆、可控制硬件的嵌入式 AI Agent。 但部署完成 ≠ 马上会用。当你插上 Type-C 线,打开串口终端,看到熟悉的 mimi> 提示符时,下一步该做什么?如何连 Wi‑Fi?怎样告诉 MimiClaw 你的 LLM API 密钥?飞书机器人怎么才能“活”起来?日常使用中最常用哪些命令? 本文不重复部署过程(假设你已经烧录成功),而是聚焦开机后的实际操作:从上电启动、串口连接,到配置网络、设置 LLM、启动飞书机器人,再到日常最常用的 mimi 命令速查。全部基于真实测试,每一条命令都附有说明和示例,让你拿到就能用,用完就能记住。 #打开你的行空板 K10,跟着这篇文章,10 分钟让你的 MimiClaw 真正 “听懂人话、干得了活”。  |
|
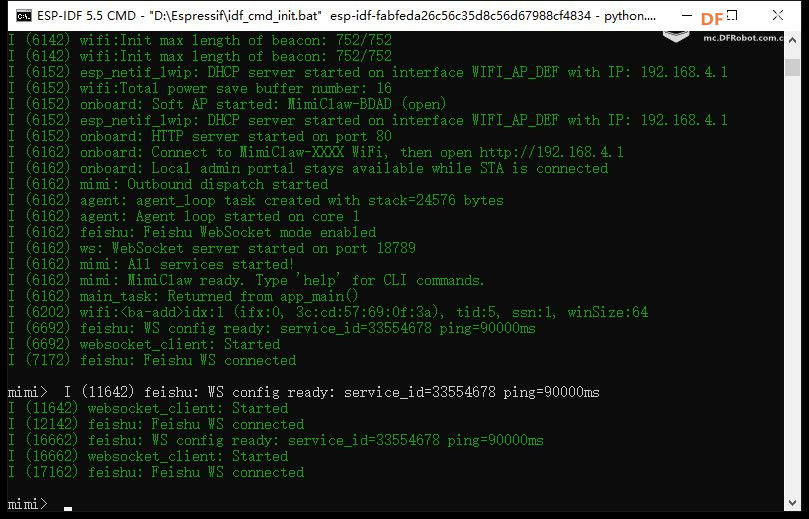
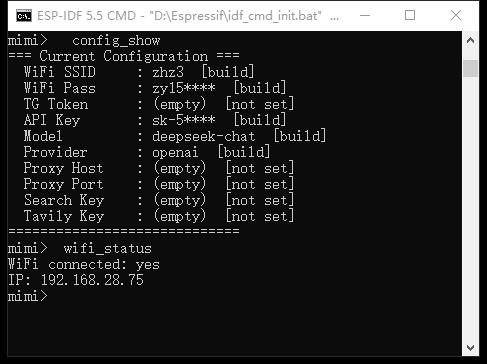
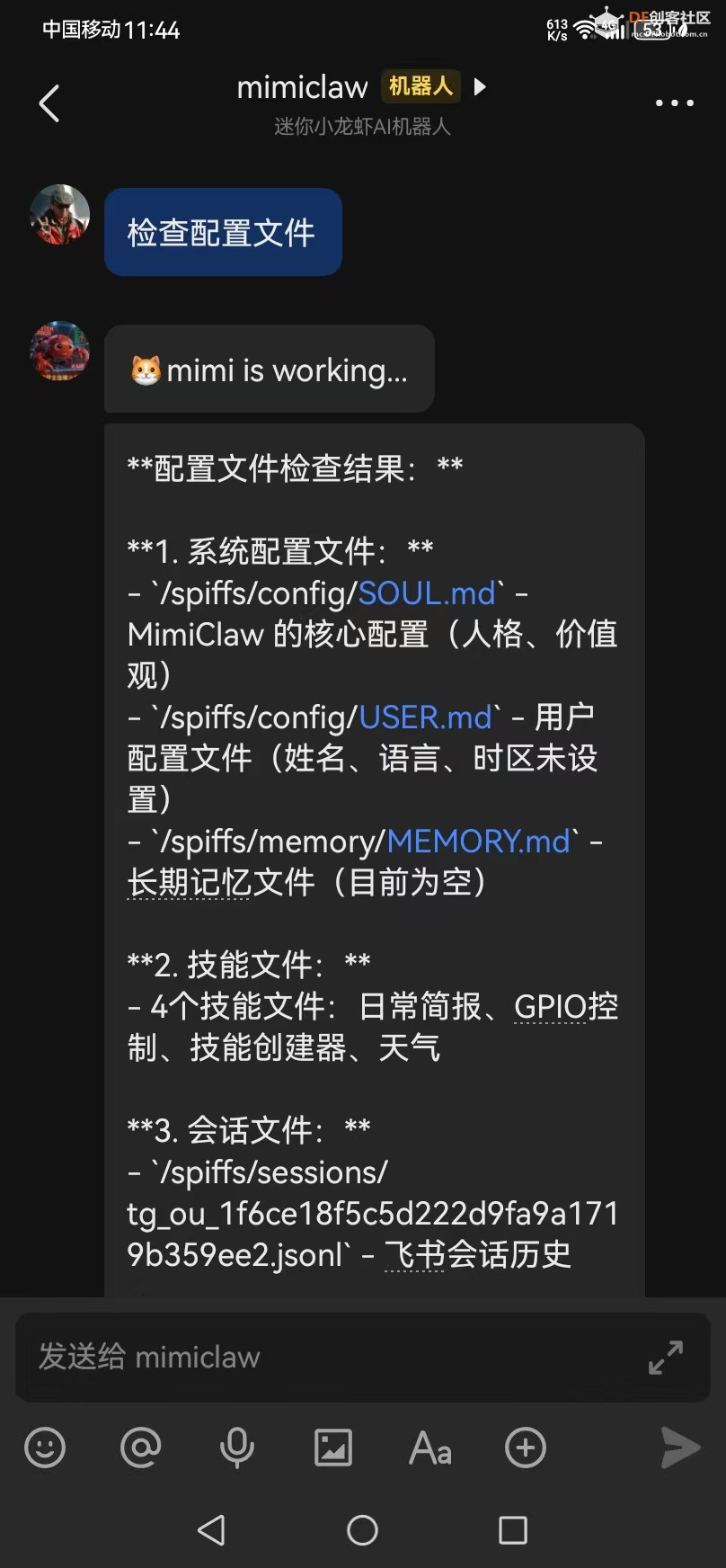
本帖最后由 驴友花雕 于 2026-4-5 11:27 编辑 二、开机后验证MimiClaw初始状态(Wi‑Fi、LLM、飞书) 1、Wi‑Fi 连接状态确认 使用命令:wifi_status ```bash mimi> wifi_status ``` 实际输出 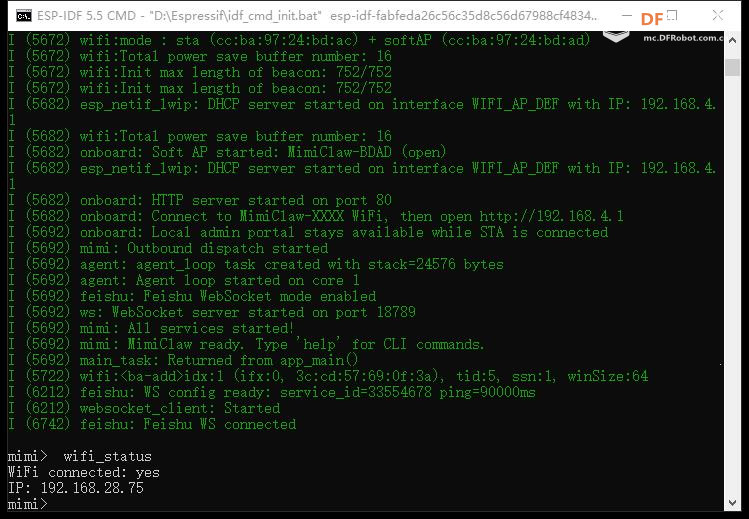 如果显示 Connected 且有 IP,说明 Wi‑Fi 已正常工作。 如果显示 Disconnected,则需要重新执行 set_wifi。 2、LLM 配置确认 方法1:config_show(推荐) ```bash mimi> config_show ``` 在输出中查找以下几行(密钥会被部分隐藏): ```bash API Key: sk-********... Model: deepseek-chat Model Provider: openai ``` 如果显示正确,说明已写入 NVS。 实际输出 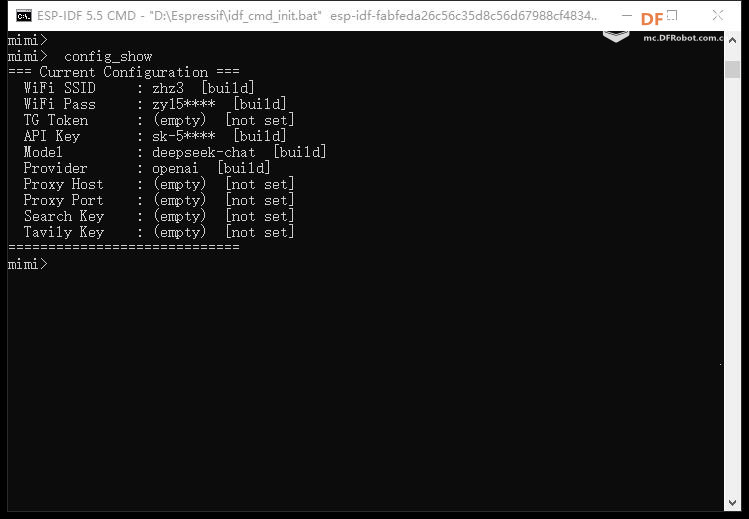 方法2:直接发送一条飞书/Telegram 消息测试 在飞书里向机器人发送一条消息,例如 你好。如果机器人能正常回复(且回复内容合理),说明 LLM 配置正确且网络连通。 注意:首次回复可能需要几秒钟(API 调用延迟)。 方法3:feishu_send 主动发送测试(见下节) 3、飞书机器人确认 方法1:feishu_send 主动发送消息 ```bash mimi> feishu_send <你的open_id或chat_id> "测试消息" ``` 如果你不知道 receive_id,可以先在飞书里向机器人发一条任意消息,然后在串口日志中查看收到的消息结构(通常会有 open_id 或 chat_id)。 发送成功后,飞书会收到一条来自机器人的消息,说明飞书凭证有效且机器人已上线。 打开手机飞书  实际回复情况 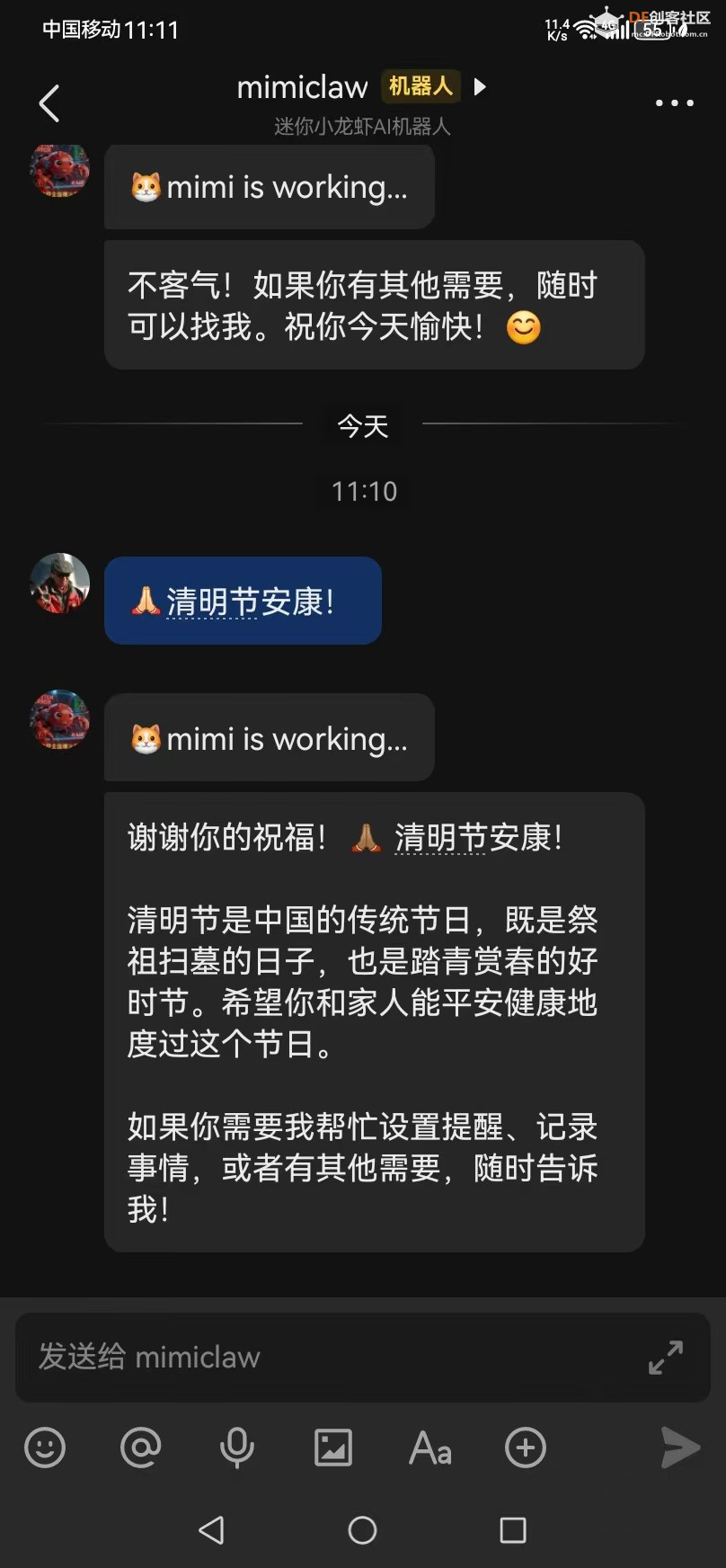 方法2:查看启动日志 重启设备后,串口输出中应包含类似: ```bash Feishu: credentials loaded, starting... Feishu: long connection established ``` 如果没有,说明凭证未配置或格式错误。 方法3:在飞书客户端直接对话 向机器人发送 /ping 或任意文字。如果机器人有回复(即使是错误提示),说明飞书连接正常。 串口监视器 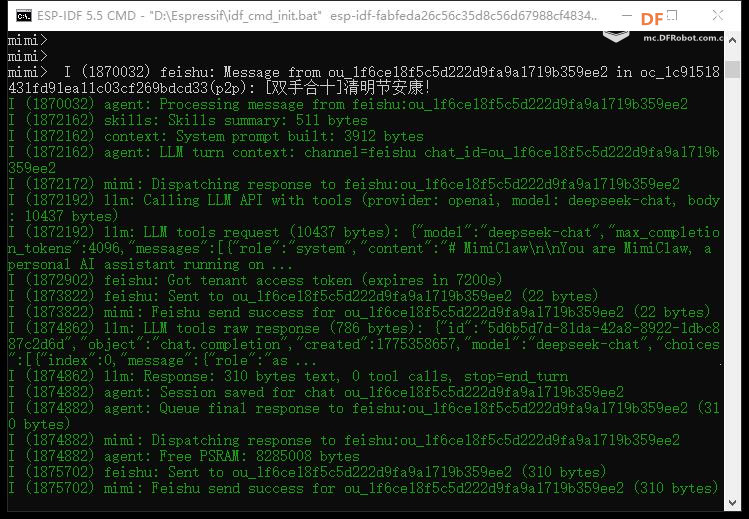 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






