|
27406| 7
|
[讨论交流] Mind+模拟演示 PID控制(1) |
1、比例控制(巡迹——单传感器)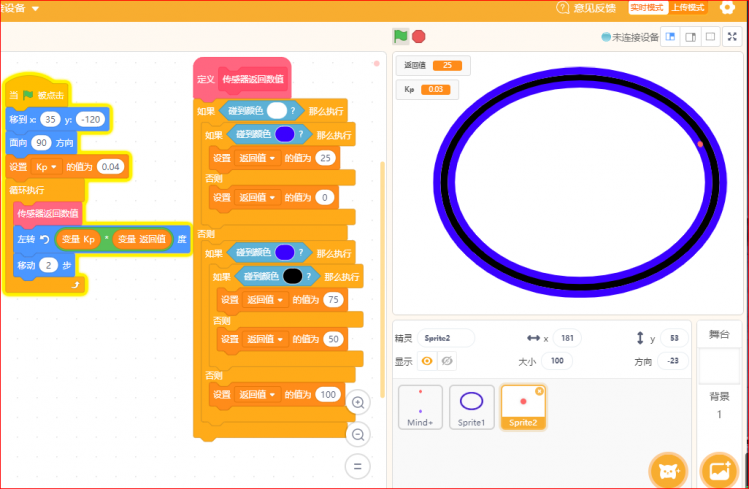   2、比例+微分控制(巡迹——单传感器) 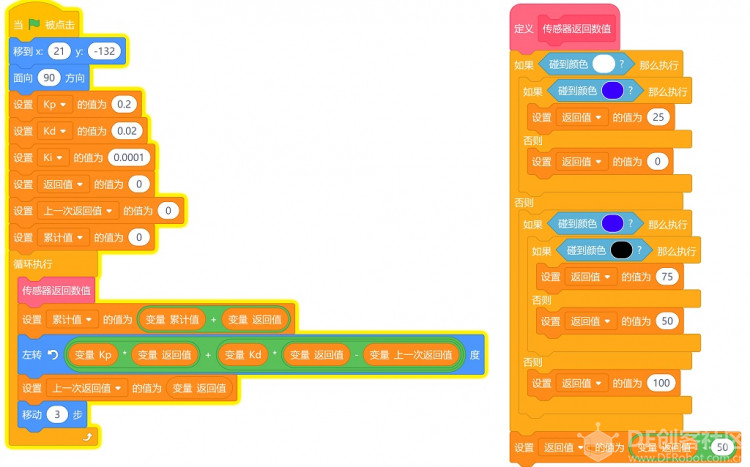  根据上面的公式,进行了相应修改。  当Kp=0.2,Ki=0.02时,移动5步为极限值,有时也会脱轨。  (360浏览器在极速模式下,GIF图不动!!!) 明天加上积分试试 一、PID控制原理与程序流程 1、过程控制 对生产过程某一或某些物理参数进行自动控制。 模拟控制系统: 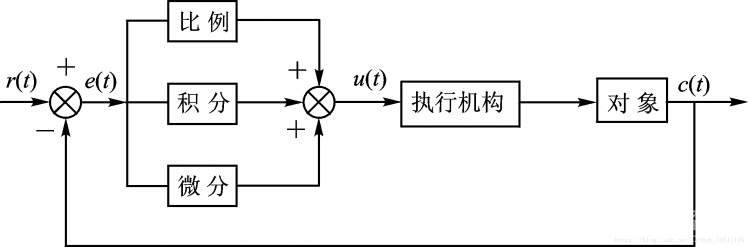 图1-1 基本模拟反馈控制回路 被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节器按照一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。 微机过程控制系统: 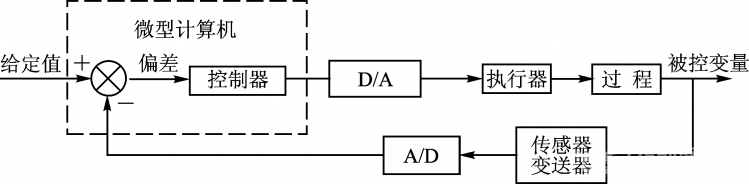 图1-2 微机过程控制系统原理图 以微型计算机作为控制器,控制规律的实现,是通过软件来完成的。改变控制规律,只要改变相应的程序即可。 模拟PID调节器: 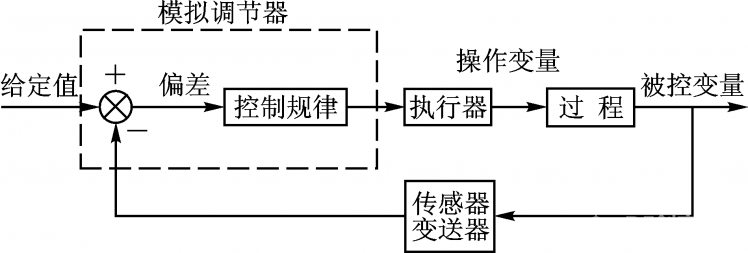 图1 模拟PID控制系统原理框图 PID调节器是一种线性调节器,它将给定的r(t)的值与实际输出的c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制。 (1)、PID调节器的微分方程 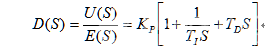 式中 e(t) = r(t) - c(t) (2)、PID调节器的传输函数  2、PID调节各个单元的作用 (1)、比例单元P:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差。 (2)、积分单元I:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。 (3)、微分单元D:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。  PID_比例控制.rar PID_比例控制.rar |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶 6666666
6666666

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






