|
59272| 27
|
[项目] 【2020】响应号召,在家撸猫 |

|
引用活动发起的开头句“2020春节, 将会成为一个让人难忘的春节”;全国人民、万众一心、抗击肺炎。我们能做的很简单,宅-宅-宅-坚持宅在家;为了打发无聊时间,我和孩子一起做了个open cat项目,分享给大家;感兴趣的小伙伴可以一起撸起来。 教程内容较长,先给大家放段视频: 步骤一、组装小猫模型 1、配件 : 3D打印件一套 180 舵机 3个(猫头、脖子、尾巴各一个) MG90S舵机 8个(四肢) 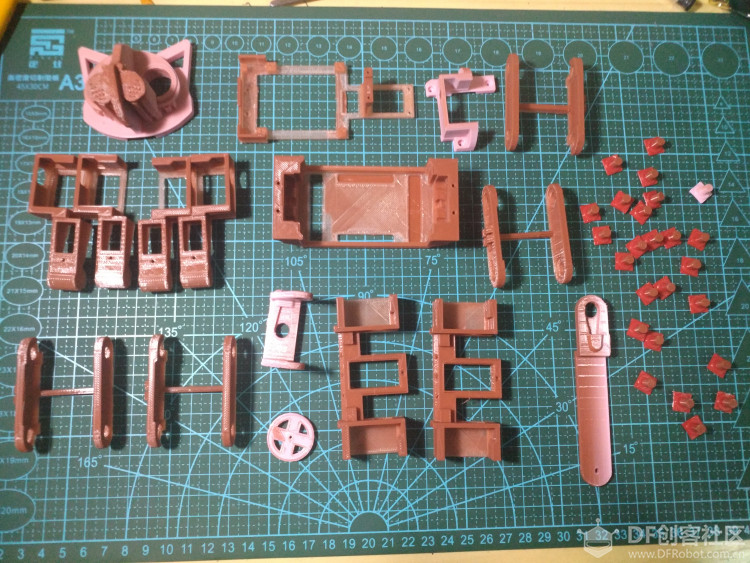 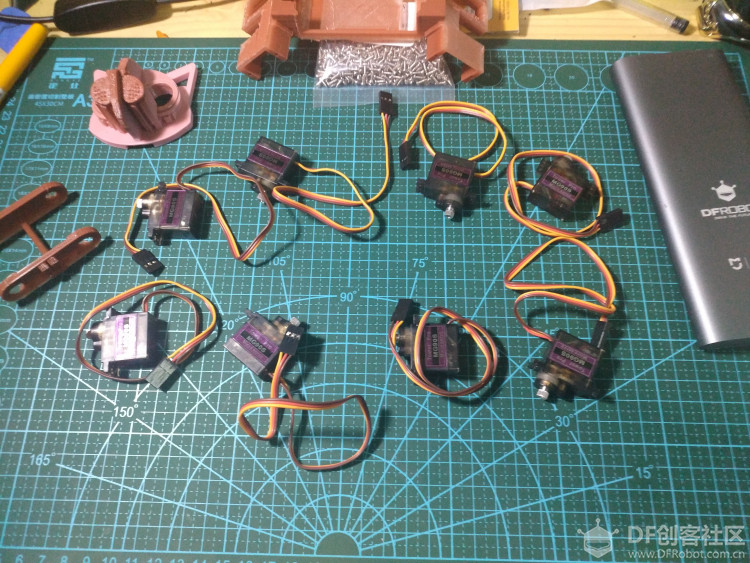 2、安装小猫的四条小腿和大腿部分 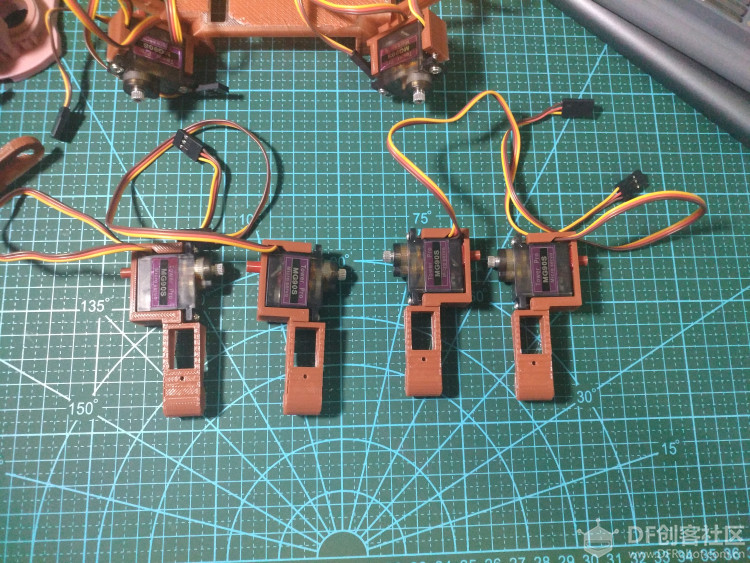     4、安装小猫头部和尾部 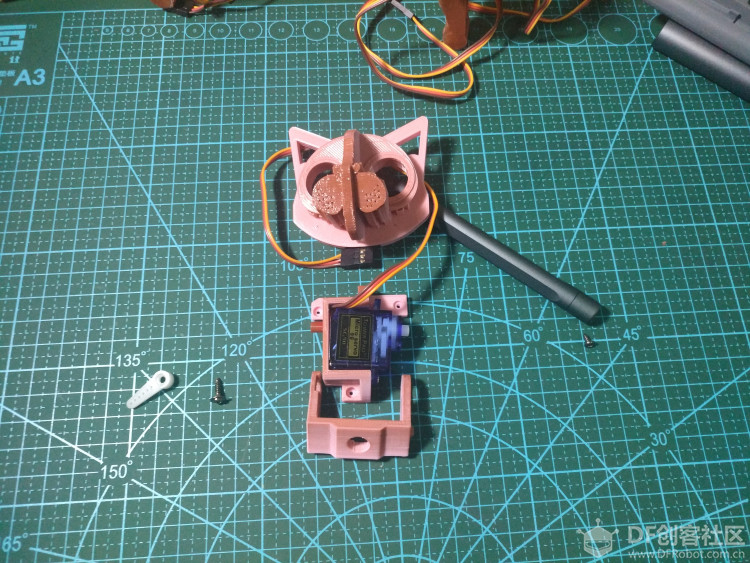 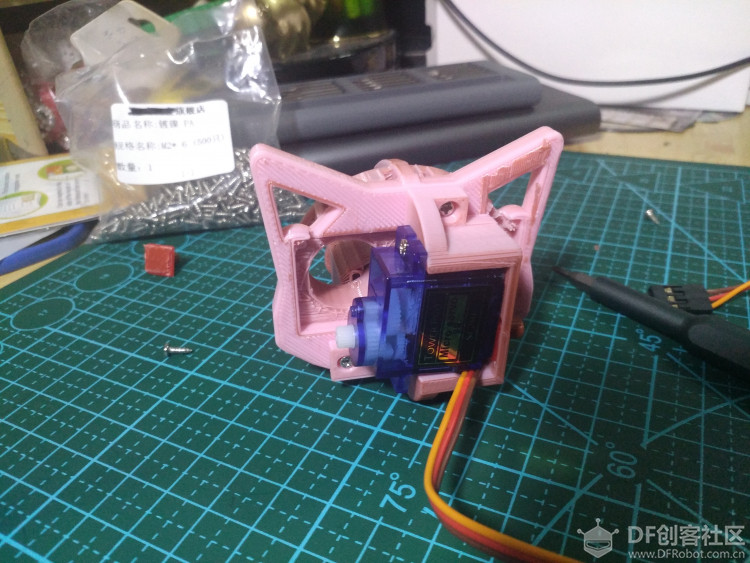 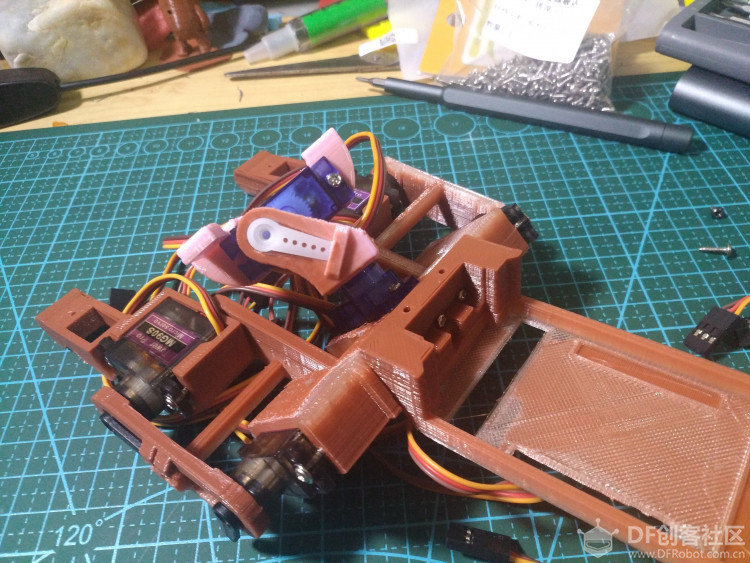 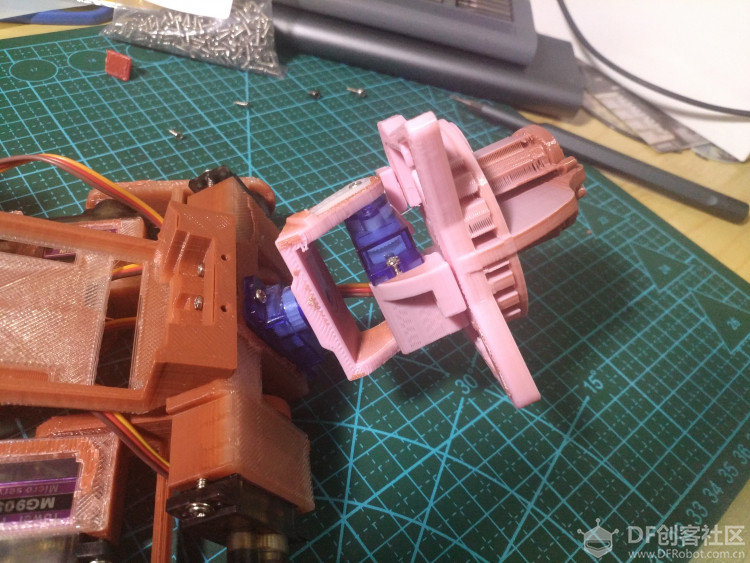 尾部  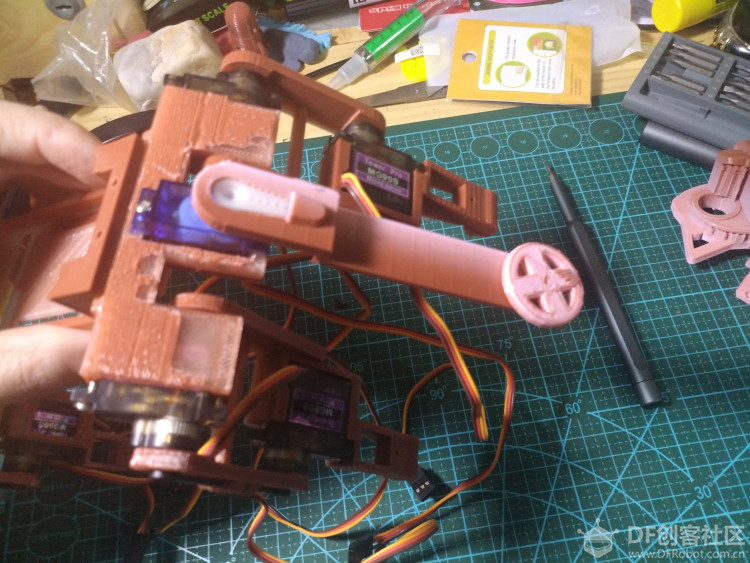 5、组装结束,摆拍几个造型。 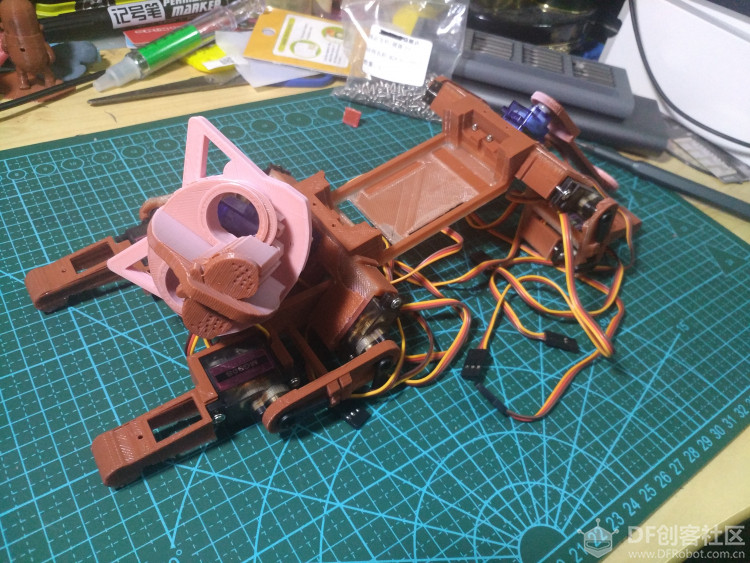 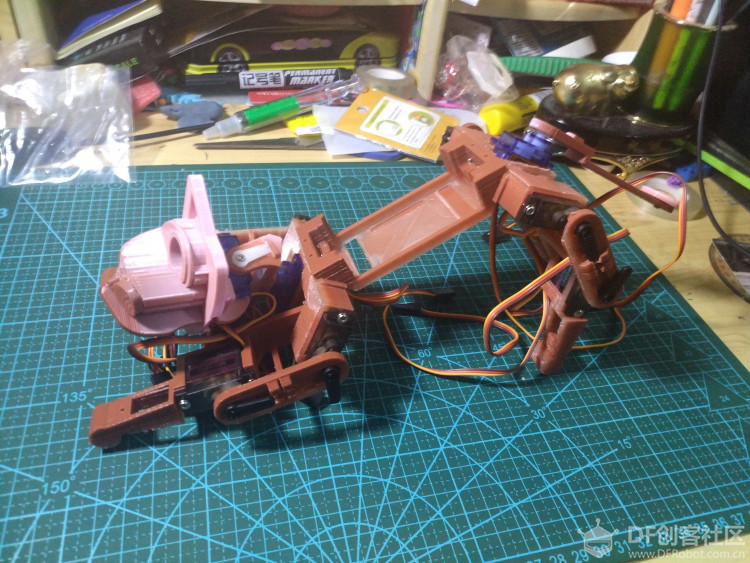 步骤二、小猫动起来软件实现的三个方法(受限手头器材,只完成了三种,更多方法欢迎大家一起来实现) 方法一 DF威龙24路舵机驱动板 配合上位机完成动作 此操作难度在安装驱动,着实费了些劲,但上位机设置超级简单;唯一小缺点控制器需要连接电脑,无法脱机工作。(硬件购买及上位机下载链接https://www.dfrobot.com.cn/goods-976.html) 配件:24路舵机控制板 +数据线+电源盒1个 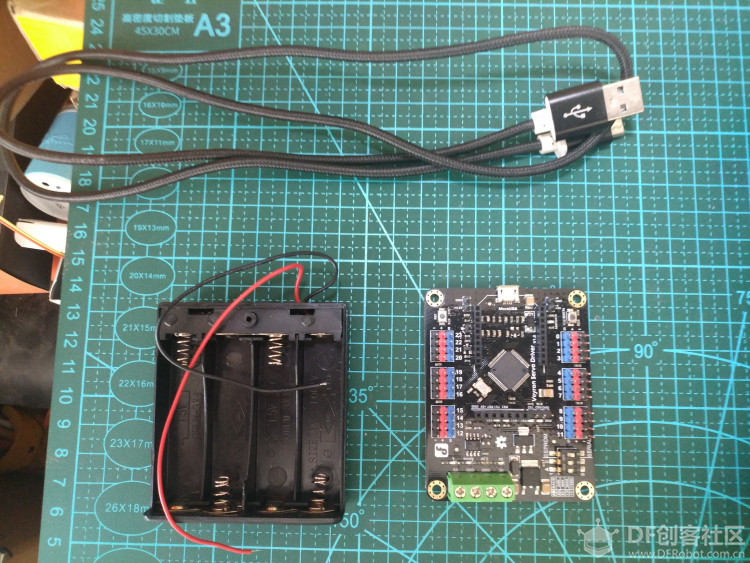 上位机软件截图  方法二 程序控制脱离电脑束缚 1、硬件:24路舵机控制板 +UNO板子+电源盒1个(舵机供电)+9V充电电池(威龙舵机控制板供电)+9V电池(UNO板子供电) (此处需要连接舵机11个,连接时请务必注意舵机正负极) 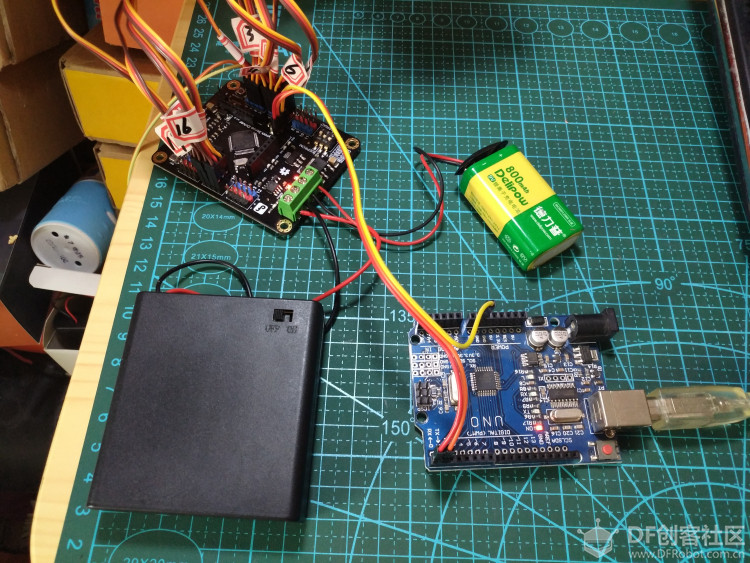 2.Arduino 程序编写并上传到UNO 此处参考了DF wiki 文章教程;舵机控制没有使用舵机库,使用的是控制脉宽命令的方法实现。 请务必注意:180°舵机控制脉宽参考范围500us--2500us,对应角度-90°-- +90°。 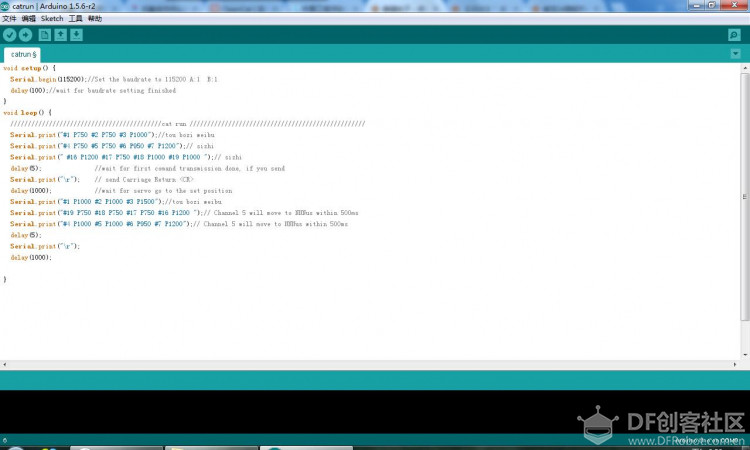 3.运行效果 方法三、MIND1.61.+Romeo 三合一Arduino兼容控制器=老少皆宜的脱机小猫 1、硬件:小猫套件+Romeo 三合一Arduino兼容控制器*1(uno控制板的完美升级品) 4节5号电池盒+7.4V锂电池(此处后期疫情结束可优化) 2、软件,DF的mind1.6.1+简单高效 1.在mind+中选择uno主控板 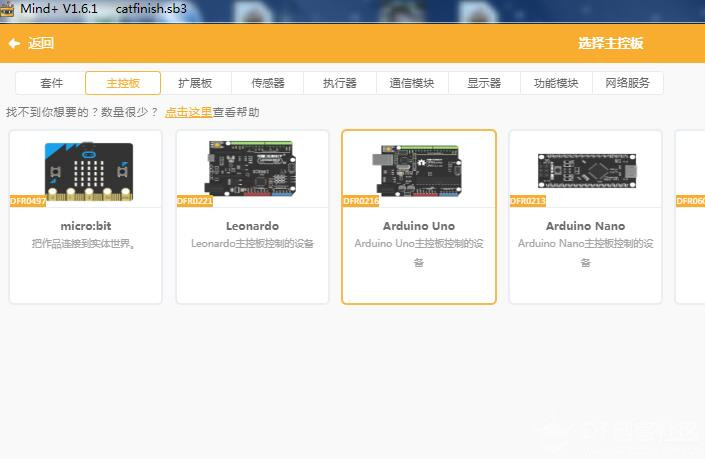 2.按照流程依次完成 初始化舵机-头-尾-四肢运动的程序 主程序如下: 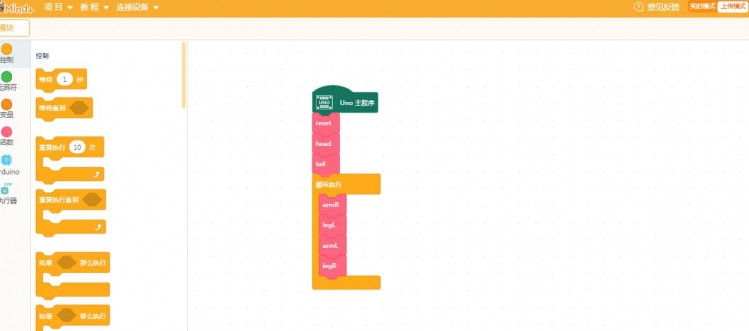 初始化舵机、头部、尾部运动 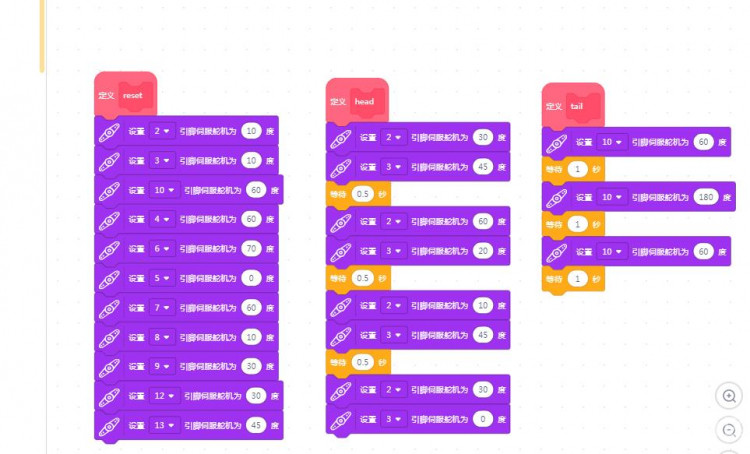 小猫步态运动程序 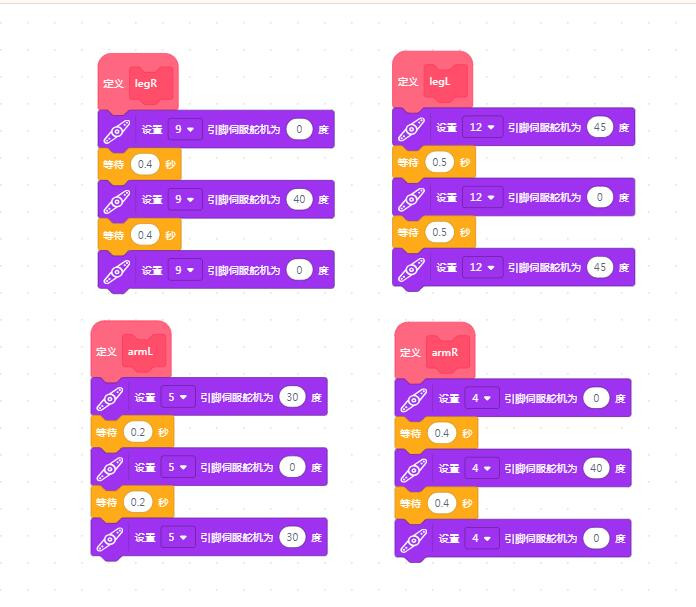 mind+程序下载见文末 3.安装链接舵机,测试小猫 (舵机连接时请务必注意舵机正负极) 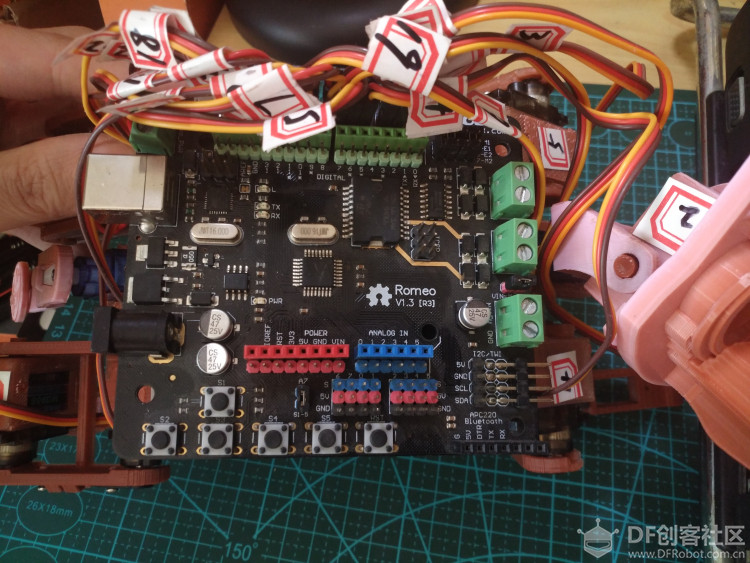 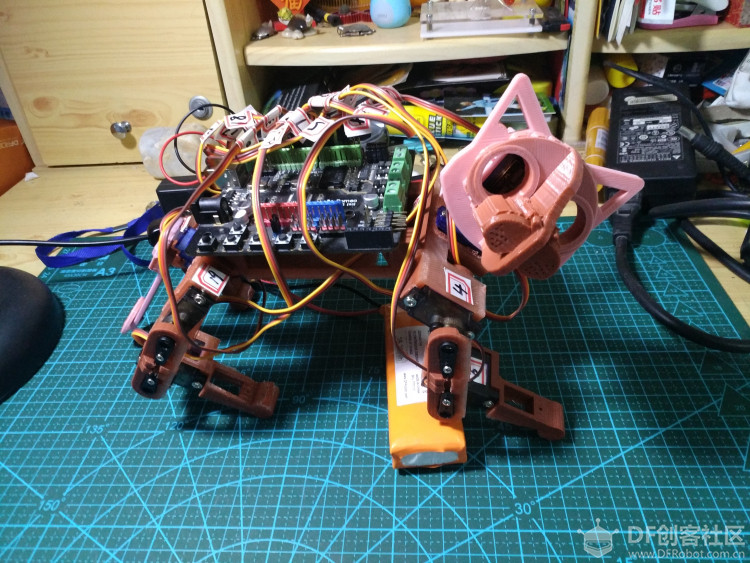 线太多,好像一只刺猬 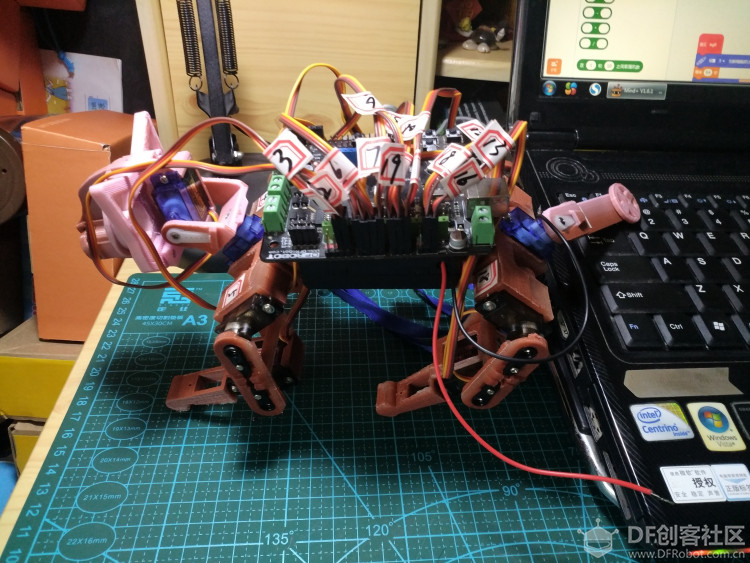 测试绝对是一个艰苦而漫长的过程 三、神器推荐,舵机测试器 (建议DF上架该神器) 经济实惠,使用简单;可同时控制三个舵机,可直接在uno板取电,链接舵机即可使用。 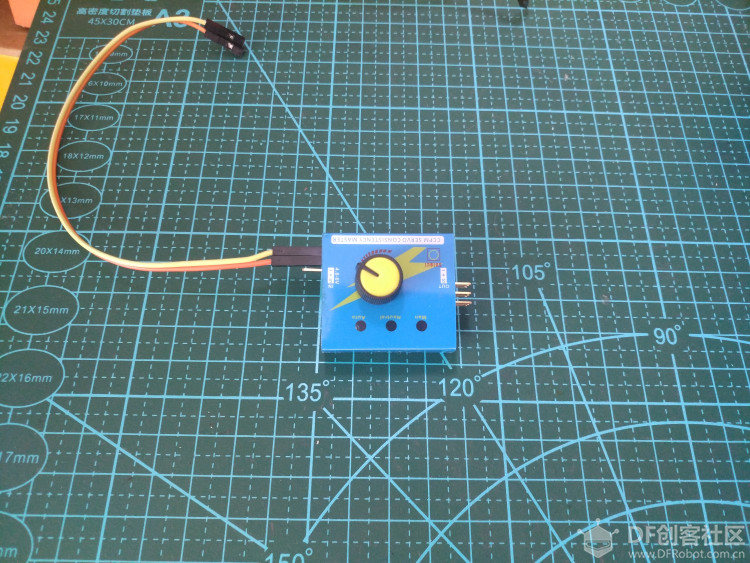  打印模型下载地址 链接:https://pan.baidu.com/s/11XWSL6s58sFWyFkAkm7v6Q 提取码:pmo2 |

517 Bytes, 下载次数: 10118
167.84 KB, 下载次数: 10453



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶




 可以批量玩具生产了
可以批量玩具生产了

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






