|
6450| 4
|
[项目] 可AI的老鼠 |

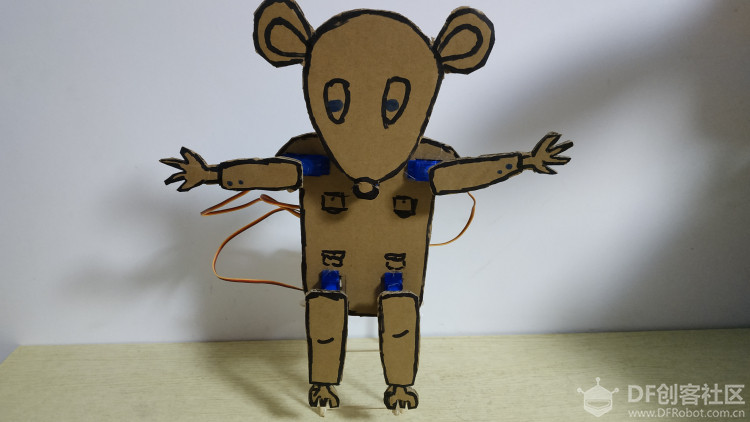 演示视频 技术说明 制作过程 No.1 准备材料 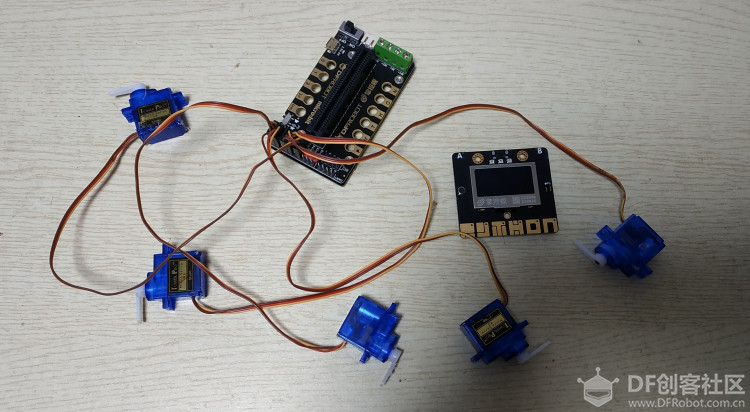 材料清单: 掌控板 1块 扩展板 1块 180°舵机 5个 瓦楞纸板 1块 小木棒 若干 雪糕棒 若干 No.2 硬件搭建 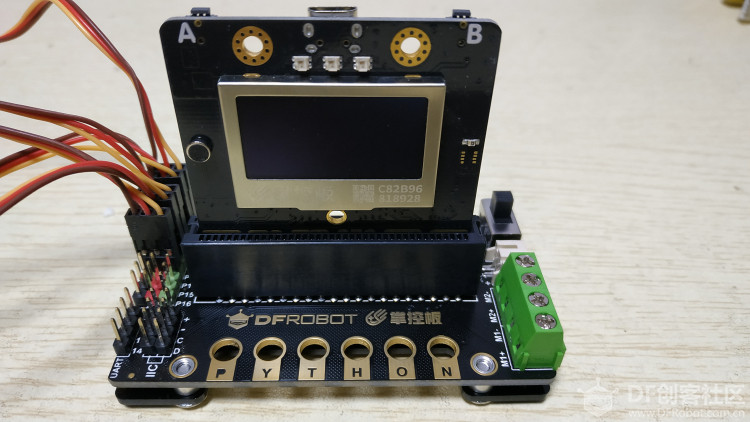 将掌控板插入扩展板插槽 *正面朝有“掌控板”标识的方向* 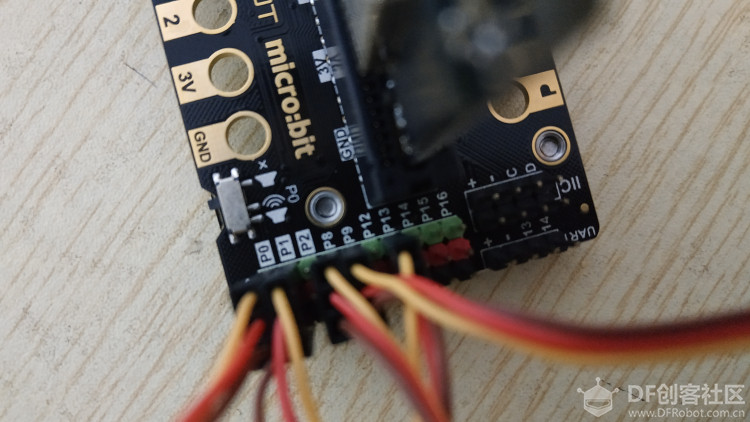 5个舵机分别接到P0、P1、P8、P9、P13引脚 *根据软件中舵机模块的可用引脚而定* No.3 编写程序 【01】打开编程软件:Mind+ V1.6.2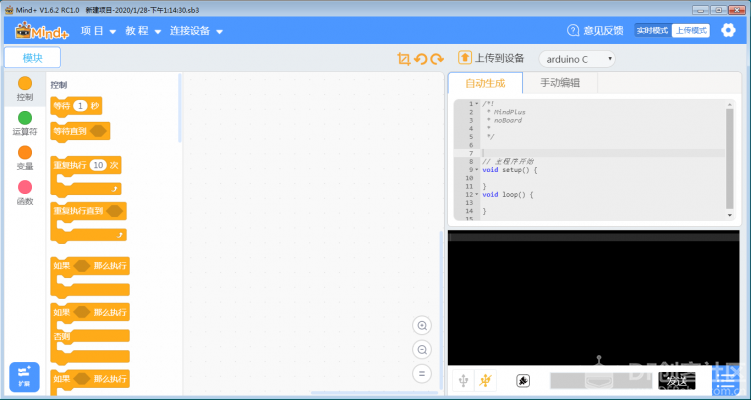    主控板—>掌控板  执行器—>舵机模块  网络服务—>AI图像识别 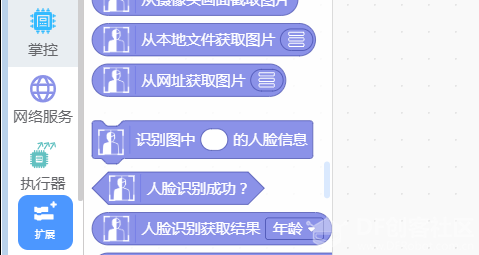 添加完成 【04】连接设备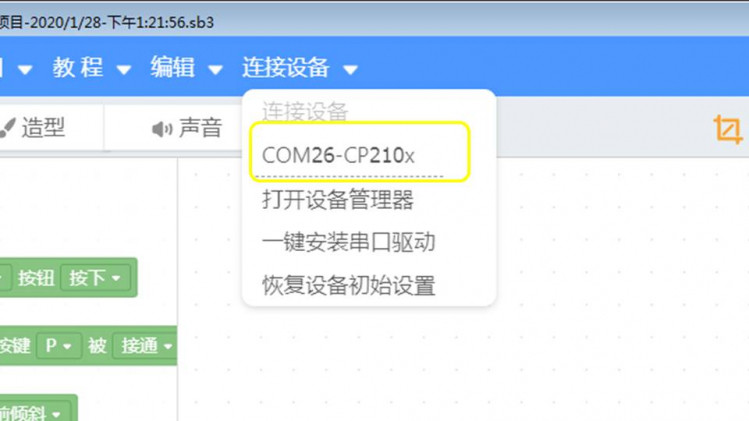 单击“连接设备”按钮,选择设备名进行连接  连接成功后,舞台上方有提示 【05】参考程序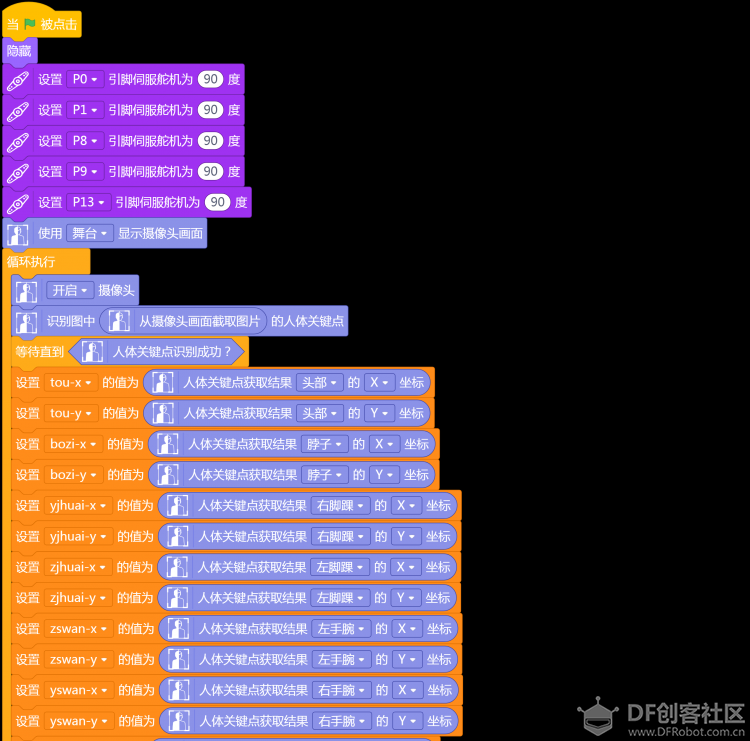 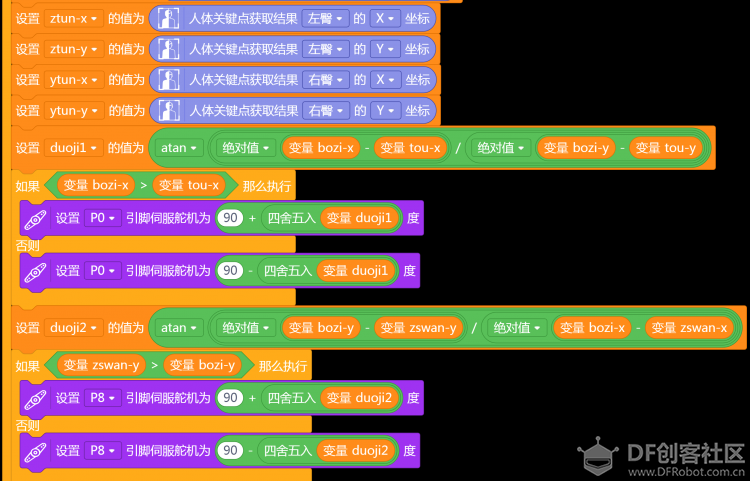 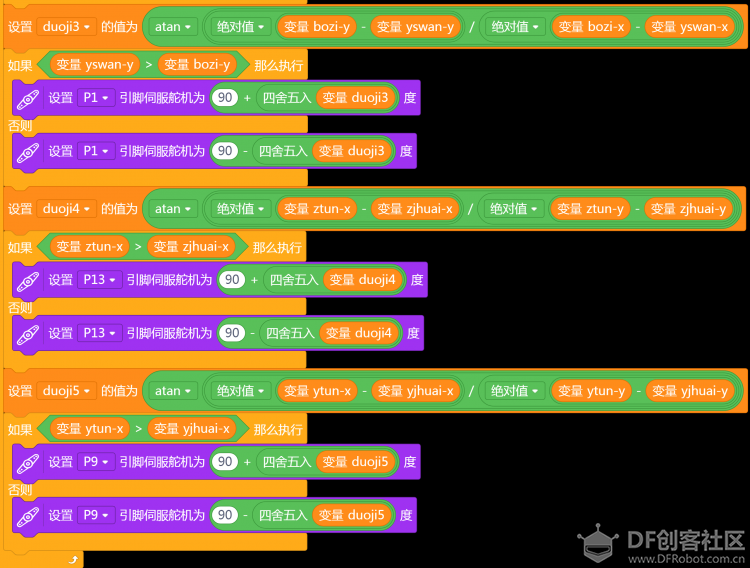 *源程序见附件* 程序说明: (1)选择了8个关键点,共用了16个变量分别记录它们的X坐标值和Y坐标值。 (2)舵机的初始角度均为90°(装配后可能需要进行微调),转动的方向和角度根据2个设定的关键点的坐标值进行计算。 第1个舵机:控制头部的摆动,运用头部和脖子的坐标值计算 第2个舵机:控制右手臂的摆动,运用右手臂和脖子的坐标值计算 第3个舵机:控制左手臂的摆动,运用左手臂和脖子的坐标值计算 第4个舵机:控制右脚的摆动,运用右脚踝和右臀的坐标值计算 第5个舵机:控制左脚的摆动,运用左脚踝和左臀的坐标值计算 下图以第1个舵机为例,演示其计算公式。 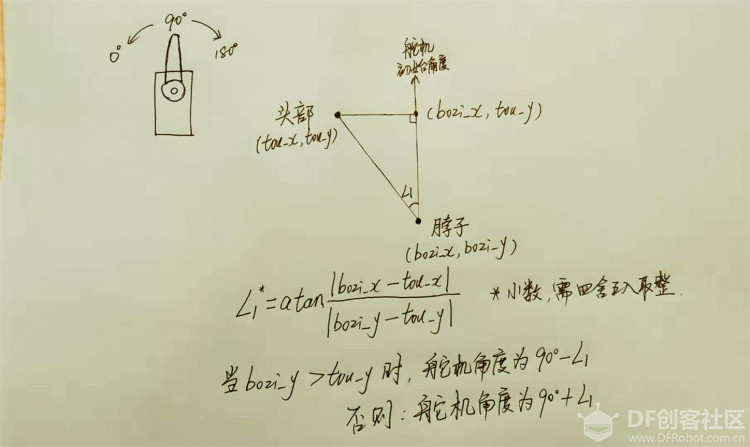 大家不要生搬硬套,因为有些舵机的旋转方向可能会与图中的相反。特别是负责控制两个手臂的舵机,计算公式略有不同,主要是对边和邻边的变化,最好的方法是画图再列公式。 我用的5个舵机就有2种不同的旋转方向,所以在后面装配工作完成后,还需要根据运行结果进行调整。 (3)关于人体关键点识别的积木在“网络服务”中,关于公式的运算积木在“运算符”中。 【06】调试程序 选择一个空间较大、背景不乱的房间,保证摄像头能够将全身都拍进画面。单击“绿旗”按钮,进行反复测试。因为这时舵机都没有安装舵盘和造型,只要保证每个舵机都能正常运转即可。 记得保存好程序。 No.4 安装舵机的舵臂 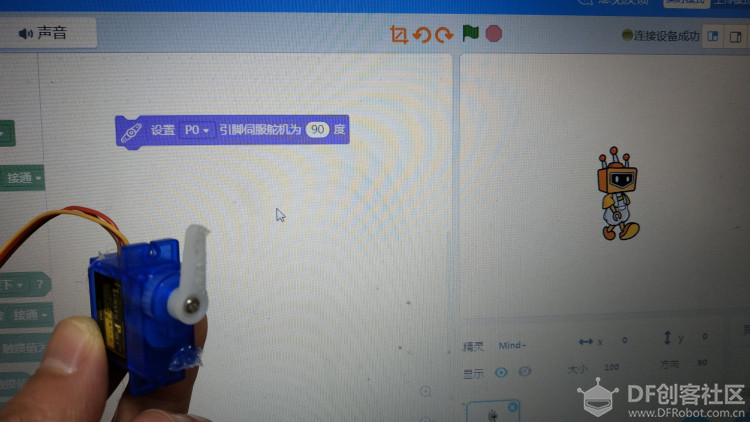 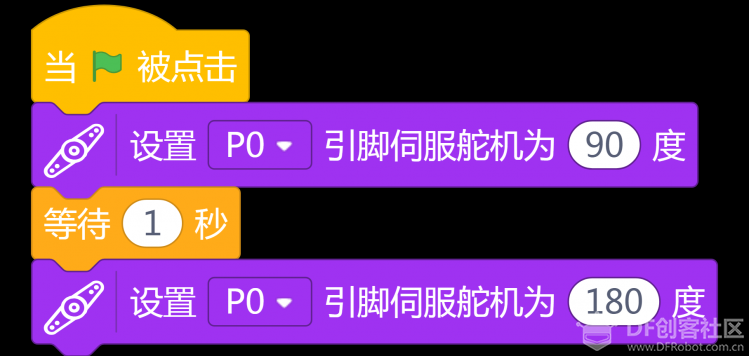 No.5 制作外型并安装硬件 【01】搭建支架 用木棒和雪糕棒制作一个支架 【02】固定主控板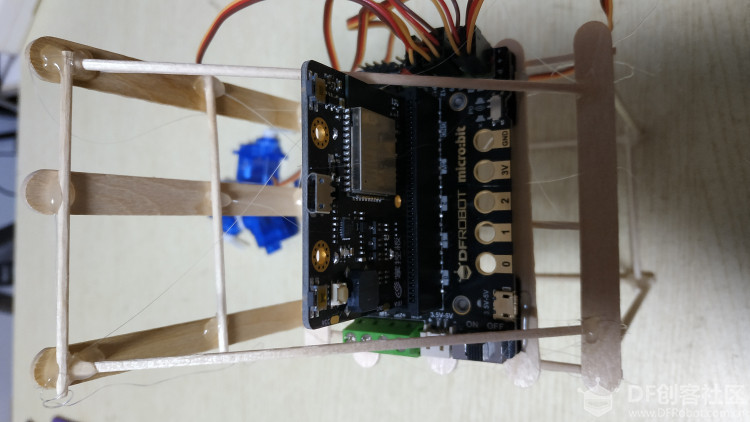 将主控板固定到支架上 【03】绘制图案、裁料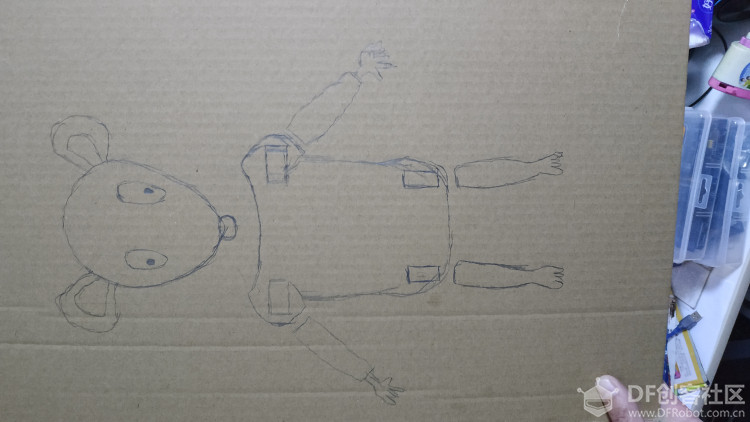 在瓦楞纸的反面进行绘制 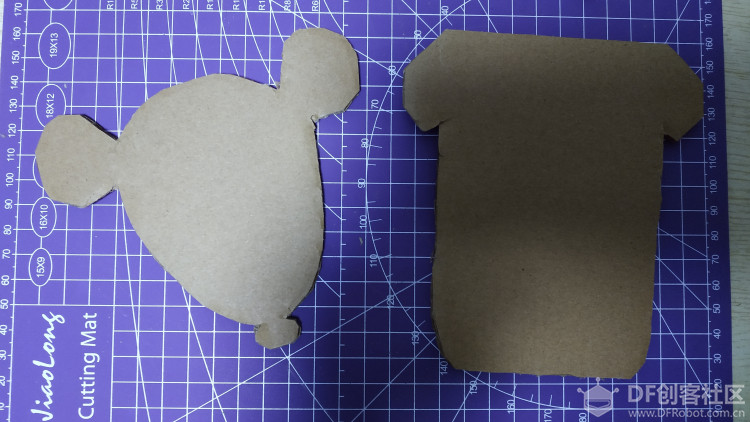 沿图案外沿剪下所有的部件 【04】安装“躯体”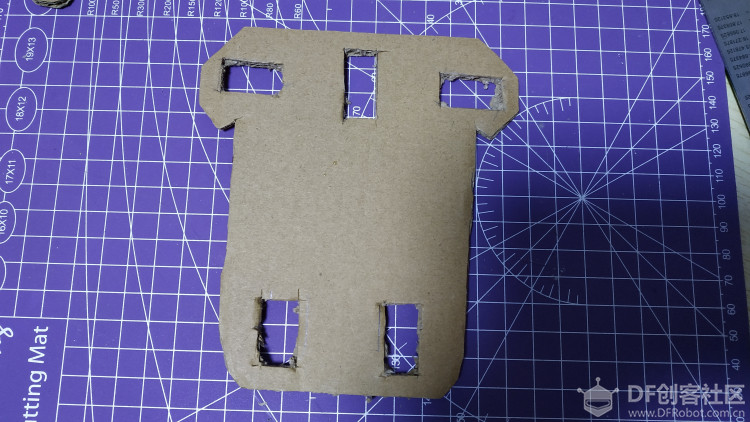 在“躯体”纸板中,切出5个长方形孔 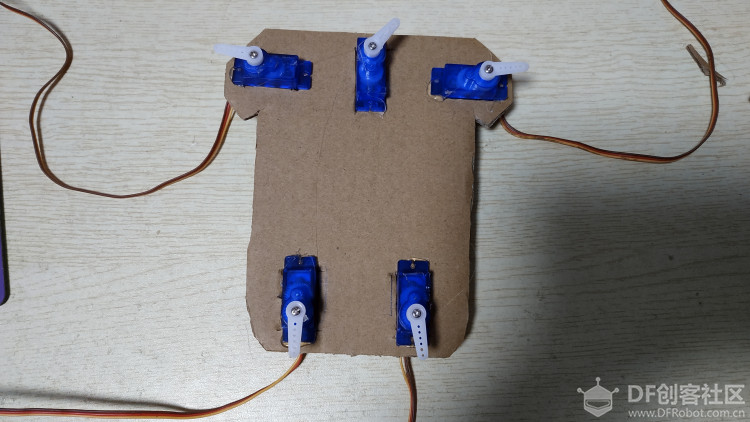 拔下所有的舵机线,穿过纸板,用热熔胶固定 *头部的舵臂不要与手臂的处于同一高度* 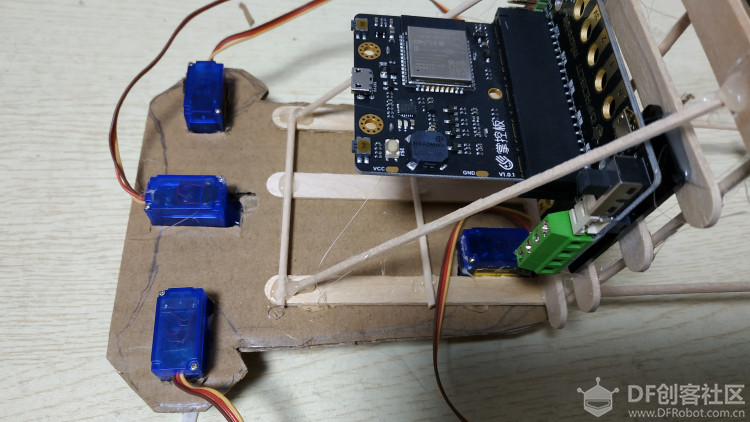 将“躯体”固定到支架上重新接好舵机的连接线 【05】安装其他部件   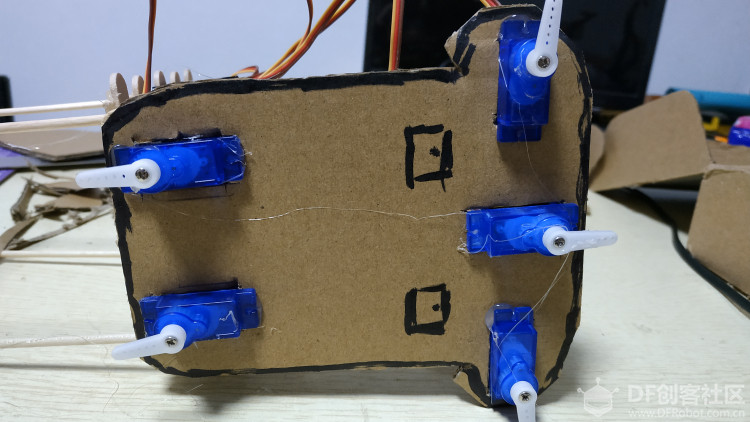 用记号笔重新绘制图案  全部安装到5个舵臂上 No.6 调试程序 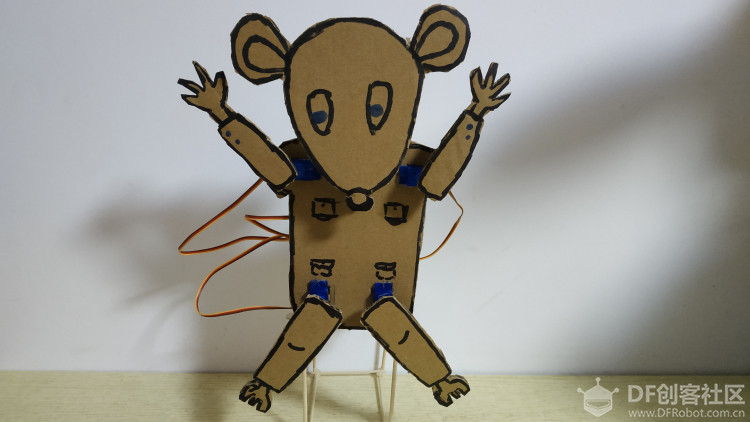 重新打开程序,连接上设备,进行调试。   欢迎大家关注我的微信公众号!  |

17.13 KB, 下载次数: 5669
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







