|
3359| 1
|
【自制无人机】“辛”路历程(一)初见 |
|
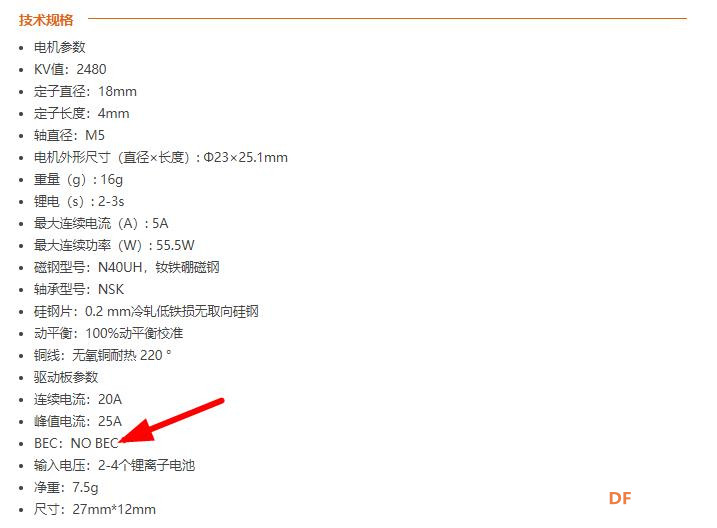
【自制无人机】“辛”路历程(一) 从DFrobot论坛试用了“MTO1804无刷直流电机(CCW)”,拿到手,一脸懵。产品介绍只有几百字,对我这个只飞过无人机,但对它一无了解的人,太难了。 开始学习中…… 1、从“了解无人机的电机”知道了电机KV值表述,只是表述,不知是什么鬼…… 很多人以为大KV的电机加大桨一定很够力,其实并不是。 因为高KV的电机相对同级别低KV电机来说,转速高但扭力小,螺旋桨越大,升力越大,但对应需要更大的力量来驱动,电机的KV越小,转动力量就越大,螺旋桨转速越高,升力越大,综上,大螺旋桨就需要用低KV电机,反之,需要高KV电机。 如果高KV电机带大桨,要么根本不能正常运转,要么桨转速不够不能离地,要么使电机过烫而烧毁,引发飞行事故  无刷电机则常见是标KV值,无刷的KV值是无刷特有,是指电压每增加1V,电机的转速增加多少RPM,例如3000KV意思则为每提高1V的电压能让电机转速增加3000RPM,因此我们可以换算得到这个电机在8.4V满电的锂电下,转速是8.4*3000=25200RPM 无刷电机一但做好,其T数和KV值则是固定的,例如某品牌某型号的8.5T是4000KV,10.5T是3300KV这样。于是无刷电机在销售时有些会只标T数,或者只标KV值,并非所有型号都会标上T数和KV值,但是在规格参数中这2项基本都不会缺席。 标T数的,主要是3650的电机,而其他类型的则主要标KV值。这个是国际惯例有关的问题。
输出轴径: 电机需要带动车子转动,要输出动力,自然是需要靠输出的那根轴来安装马达齿或者传动轴,于是这根输出轴的尺寸就成了必须要考虑的因素。常见轴径有:2mm,3.175mm,5mm,8mm。 2、从“航模无人机中PWM信号频率浅谈”知道接收机。 3、无人机动力系统除了电机,还有这3个关键部分,太复杂了 无人机的动力系统,主要以电动机为主,主要包含电机、电调、螺旋桨以及电池。 (1)电机:指将电能转化为机械能的一种转换器,由定子、转子、铁心、磁钢主要部分组成。电机分为有刷电机和无刷电机。无人机的电机主要以无刷电机为主,一头固定在机架力臂的电机座,一头固定螺旋桨,通过旋转产生向下的推力。 (2)电调:指电子调速器,其主要作用是就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。 (3)螺旋桨:是指将发动机转动功率转化为推进力或升力的装置,螺旋桨有两个重要的参数,浆直径和将螺距,直径单位是英寸,螺距单位是毫米。我们平时所说的8045浆就是指直径8英寸螺距45mm的浆。 (4)电池:无人机上的电池一般是高倍率锂聚合物电池,特点是能量密度大、重量轻、耐电流数值较高等。 以上就是无人机动力系统的组成部分中,电机和电调是非常重要的部分。 无人机的电调,全称是电子调速器Electronic Speed Controler,英文缩写ESC,分为有刷电调和无刷电调。电调接收启动、停止、制动信号,以控制马达的启动、停止和制动;接收正反转信号,用来控制逆变桥各功率管的通断,使马达产生连续转矩。接收速度指令和速度反馈信号,用来控制和调整马达转速。简短地说,电调就是用来驱动马达的。
(1)无人机的电调,全称是电子调速器Electronic Speed Controler,英文缩写ESC,分为有刷电调和无刷电调。图1中黄色即为最普通的一款无刷电调。电调接收启动、停止、制动信号,以控制马达的启动、停止和制动;接收正反转信号,用来控制逆变桥各功率管的通断,使马达产生连续转矩。接收速度指令和速度反馈信号,用来控制和调整马达转速。简短的说,电调就是用来驱动马达的。 (2)飞控,全称飞行控制器,以下两款飞控都很常见,一款是来自大疆(DJI)公司的商业飞控,另一款是非常常见的F3开源飞控。光从外形上看,飞控就比电调的接口丰富的多,它是飞控器的“大脑”,收集传感器的信息、接收远程遥控的指令,并进行处理,然后传递控制信号给电调,进而驱动马达来响应控制,达到控制飞行器姿态的目的。 综上,电调是不可以替代飞控的。 5、飞控可自制,需要控制主板(单片机、Microbit、Arduino等)?、mpu6050、PID控制算法,不知道对不对?
6、明天试一下用Microbit给电调PWM信号,看电机是否能转。但不知PWM信号如何来调整? |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






