|
3231| 1
|
【自制无人机】“辛”路历程(八)PID控制 |
|
【自制无人机】“辛”路历程(八) 【前言】 无人机飞控,绕不开的PID控制。 PID 控制是自动化控制领域应用非常广的控制方式,P 代表比例,I 代表积分,D 代表微分,从这些名词中可以看出,PID 控制是基于数学中一项重要的分支:微积分学为基础的数字化自动控制方式,它以传感器采集的数据作为输入源,按预定的 PID 参数根据特定的公式计算以后输出控制。 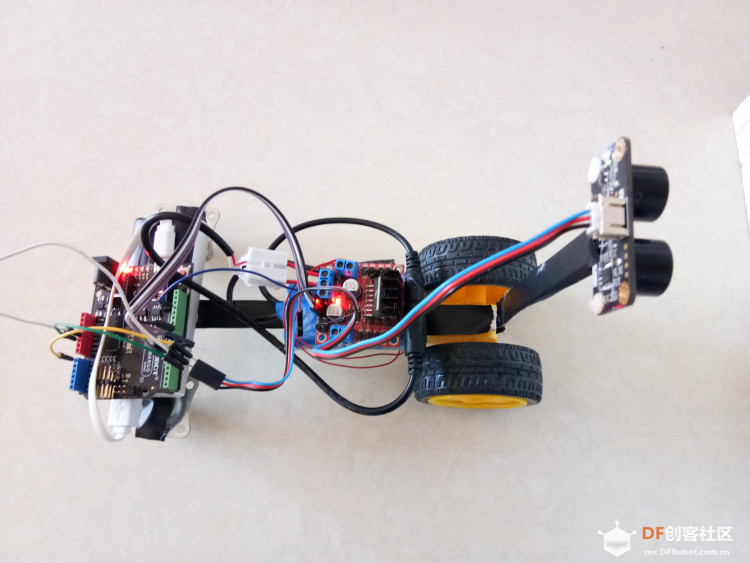 测试PID测距控制专用小车 过多的也不说了,网络相关内容,十分丰富。 1、下面的这个帖讲的如题目“通俗易懂”,非常适合新手。 Arduino菜鸟通俗版解读系列(10)PID控制(上) 可惜我没有找到(下),也许作者就没写。 2、下面的这个帖子,除火车到站这个例,还举了水缸加水的栗子。 PID简单理论分析(实例分析) 3、PID库 使用PID库,轻松搞定PID(上) 【测试一】 使用超声波PID算法测距控制。 1、调试超声波 超声波使用DFrobotGravity:URM09-模拟量超声波测距传感器 使用文档  [mw_shl_code=java,false]// # Editor : roker // # Date : 18.02.2019 // # Product name: URM09 Ultrasonic Sensor(Gravity Analog)(V1.0) // # Product SKU : SEN0307 // # Version : 1.0 #define MAX_RANG (520)//模块测距极值为520cm(比有效最大量程值略大) #define ADC_SOLUTION (1023.0)//Arduino UNO 的ADC精度为10bit int sensityPin = A0; // select the input pin void setup() { // Serial init Serial.begin(9600); } float dist_t, sensity_t; void loop() { // read the value from the sensor: sensity_t = analogRead(sensityPin); // turn the ledPin on dist_t = sensity_t * MAX_RANG / ADC_SOLUTION;// Serial.print(dist_t,0); Serial.println("cm"); delay(500); }[/mw_shl_code] 【测试二】 PID测距控制,专门为了这个测试制作了一个小车,采用单电机控制,超声波测距,PID算法控制到指定距离。 [mw_shl_code=java,false]#define MAX_RANG (520)//模块测距极值为520cm(比有效最大量程值略大) #define ADC_SOLUTION (1023.0)//Arduino UNO 的ADC精度为10bit int sensityPin = A0; int input1 = 5; // pin 5 向 input1 输出 int input2 = 6; // pin 6 向 input2 输出 int enA = 10; //pin 10 向 输出A使能端输出 unsigned long lastTime; double Input, Output, Setpoint; double errSum, lastErr; double kp, ki, kd; void Compute() { /*How long since we last calculated*/ unsigned long now = millis(); double timeChange = (double)(now - lastTime); /*Compute all the working error variables*/ double error = Setpoint - Input; if(error<0){ errSum += (error * timeChange); double dErr = (error - lastErr) / timeChange; /*Compute PID Output*/ Output = kp * error + ki * errSum + kd * dErr; /*Remember some variables for next time*/ lastErr = error; lastTime = now; } else { Output =45; } } void SetTunings(double Kp, double Ki, double Kd) { kp = Kp; ki = Ki; kd = Kd; } void setup() { // Serial init Serial.begin(9600); pinMode(input1,OUTPUT); pinMode(input2,OUTPUT); pinMode(enA,OUTPUT); Setpoint=30; SetTunings(2, 0.001, 0.01); } float dist_t, sensity_t; void loop() { // read the value from the sensor: sensity_t = analogRead(sensityPin); // turn the ledPin on dist_t = sensity_t * MAX_RANG / ADC_SOLUTION;// Input=dist_t; /*Serial.print(dist_t,0);*/ Compute(); digitalWrite(input1,HIGH); //给高电平 digitalWrite(input2,LOW); //给低电平 if(45-Output>254){ analogWrite(enA,254); } else{ analogWrite(enA,45-Output); } Serial.println(Output,0); delay(50); }[/mw_shl_code] 测试视频 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






