|
4275| 0
|
[官方资料] Jetson Nano 2GB 系列文章(18):Utils 的 videoSource 工具 |

|
前两篇已经用 10 行 Python 代码展现了 Hello AI World 强大而且简便的物件检测识别能力,虽然大部分的人都将目光集中在了深度学习的三大推理识别(图像分类、物件检测、语义分割),但是在整个项目中,其实还有两个非常重要的功臣功能,那就是 videoSource() 与 videoOutput() 这两个专司输入与输出的接口。 如果你认为这两个功能只是简单地负责数据接收与显示的话,这就大大浪费了项目作者的心血结晶,因此我们在进入本项目另外两个深度学习推理应用之前,先要把这两个幕后功臣的内涵展现出来,因为这与后面的应用息息相关。本文先就 videoSource() 这个功能进行说明。 有经验的开发人员都清楚,输入源的种类十分多样,并且格式非常繁琐,其中还包括图像的颜色空间(color space)变化,要全部集成在一个函数中去调用,已经是非常高难度的事情了,如果这个函数还能为我们集成 Jetson 的编解码芯片的调用,以及将许多非常图像处理的计算交由 CUDA 核去计算,这就是一个值得我们为之欢呼的功能了。 videoSource() 功能是项目作者一个集大成的作品,具备以下特点: 1.支持 7 种输入源方式 2.支持 7 种视频格式 :H.264、 H.265、VP8、 VP9、 MPEG-2、MPEG-4 以及 MJPEG 这样一列出来,是否已经感受到了这一功能的强大呢?由于集成这么多特点,可以使代码的调用变得异常简单,而且完全发挥 Jetson Nano 2GB 的硬件计算资源,兼具 “易用” 与 “高效” 两个极端的特色。接下来我们就用几个简单的代码,带着大家体验一下这个工具的用法。
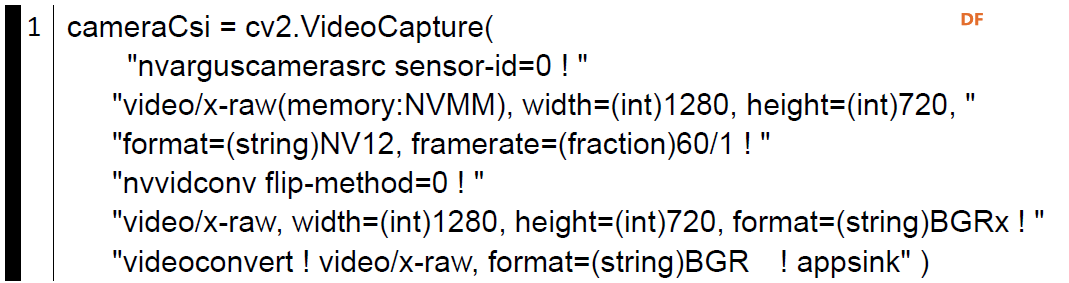
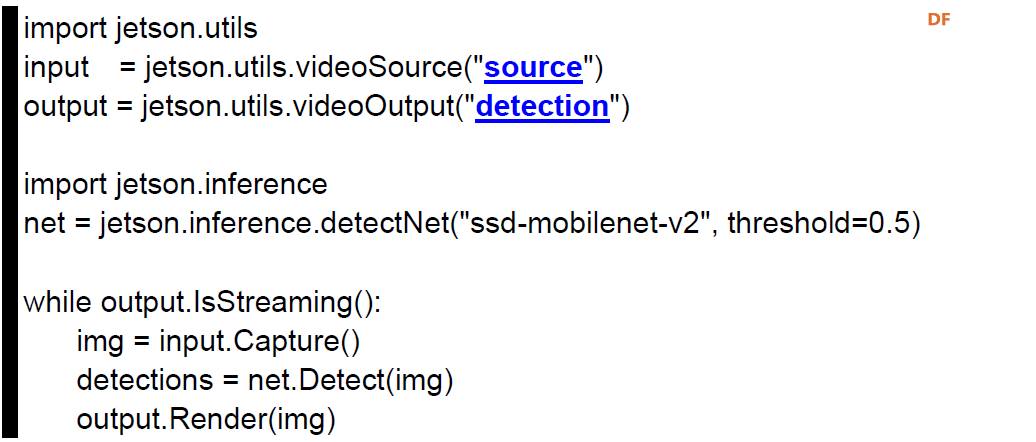
这种调用是非常艰涩而且容易出错的,对大部分初学者来说的确比较痛苦,导致很多人一开始都不愿意使用性能较好、功耗较低的 CSI 摄像头。但是在 videoSource() 这里,只需要简单填入 “csi://0” 就能创建。 在前面 “10lines.py” 代码中,已经提供了 CSI 摄像头、USB 摄像头,以及视频文件的调用方式,事实上类似的方法也适用于 RTP/RTSP 视频流以及图像文件作为输入源。 然而这里面增加一个对 “文件夹” 的支持,更是一个非常实用的功能,不过在 “图像分类”、“物件识别” 与 “语义分割” 的应用中,都有很大部分的使用场景是针对“众多独立图像”的推理,如果每次都只能一张一张的读入然后识别,就会显得十分没效率。 下面将 “10lines.py” 做简单的修改,以 etson-inferencet 提供的图像文件为例,让大家体验一下这个功能的好处:
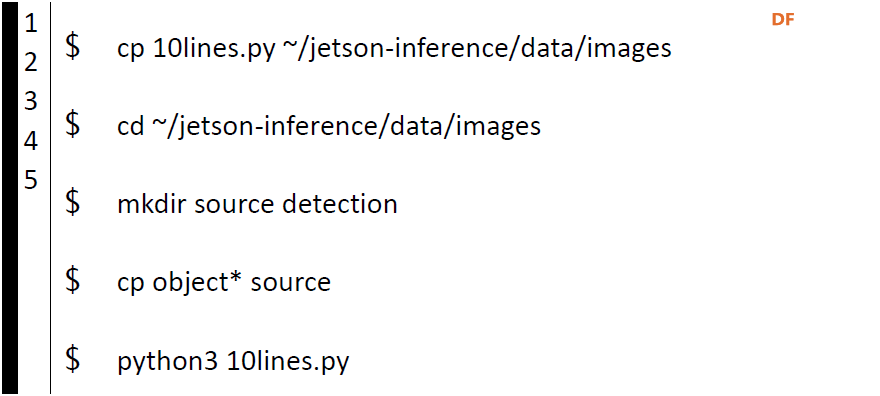
上面代码中,将输入源与输出标的设为两个不同的目录,执行之前先将这个代码复制到 ~/jetson-inference/data/images/ 去,并且为 source 目录添加一些图片。完整的执行指令如下:
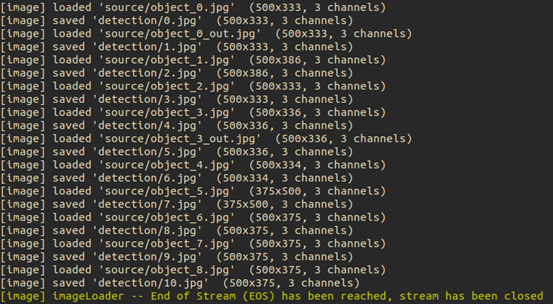
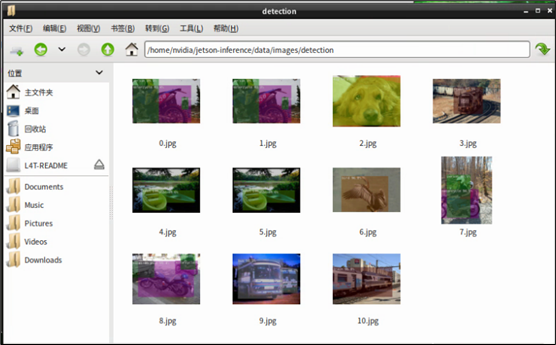
这样就会开始从 source 目录读入图像文件,执行物件识别推理后,将结果输出到 detection 目录中(如下图)。
这里之所以不选择输出到显示器,是因为显示的过程太快,没法在显示器上暂留,所以输出到另一个目录存成图片,会是比较合适的方法。
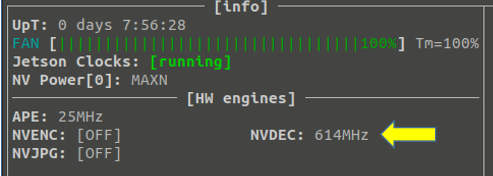
最后还有一个重点,就是调用 NVDEC 硬解码器的时机,前面提到 videoSourec() 会自动根据输入源的类型,去调用合适的解码器,不过这部分细节在作者的使用文档中并没有讲解,只能靠不断地尝试。 要检查解码器的启动与否,我们可以使用一开始教大家的 jetson-stats 检测工具,打开之后关注左下角 “NVDEC” 的变化,大部分时候都是处于 [OFF],但当我们的输入源是视频文件、RTP/RTSP 这三种类型时,“NVDEC” 后面会出现主频的变化(如下图),表示这时候已经被启动。
本文有条理地将 videoSource() 的重要特色进行了说明,就是为了后面执行其他推理识别应用时会使用到,也希望能让读者学会更多的用法。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






