|
12861| 1
|
[BXY高中信息技术教程] 「BXY」micro:bit 高中信息技术教程—智能晾衣架 |

|
一、实践情境 晾晒衣服是我们的生活日常。然而由于天气的变化多端,我们在晾晒衣服时可能会碰到突发下雨的情况,使得衣服全部淋湿。同样的,有时我们也会因为忘收衣服致使其被第二天的露水打湿。 为此,我们将设计一个智能的晾衣装置,能够在天气变化和晾衣结束时自动将衣物收进来。  二、实践目标本实践项目运用micro:bit作为智能终端,通过水分传感器和光线传感器来采集水分和环境光线,并借助舵机实现智能收衣的功能。 三、知识目标
四、实践准备硬件清单:
软件使用:BXY编程软件知识链接
简介:舵机是一种可以指定控制位置(角度)的电机,可以通过程序来指定控制舵机旋转的角度。我们最常用的舵机大多最大旋转角度是0°~180°,也有90°或者其他角度的。也有比较特殊的360°舵机,但是360°舵机不能够控制其旋转到指定的角度。这里使用的是180°舵机。
简介:水分传感器是一个利用湿度方式检测有没有水分的传感器,可以检测有没有下雨。将传感器放置在室外,当有雨水滴到花瓣状检测面上时,湿度增大,随之电压升高。 > Tips:空气湿度和是否下雨之间没有必然的联系,空气湿度高并不代表天气是雨天。因此,这里不使用之前的DHT11温湿度传感器。
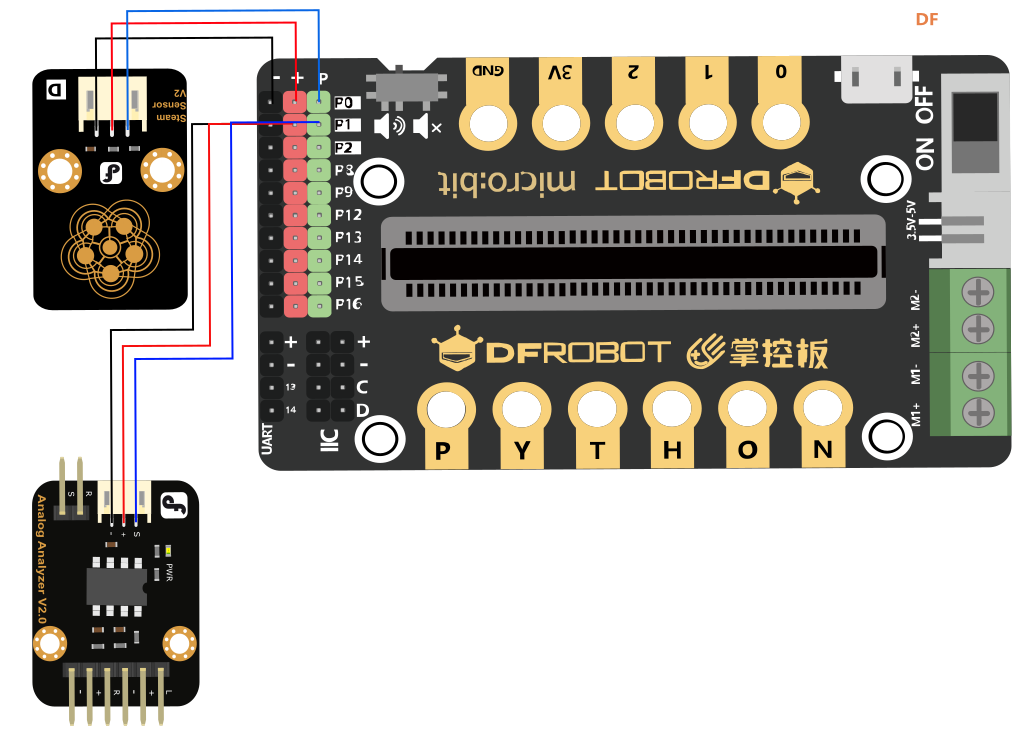
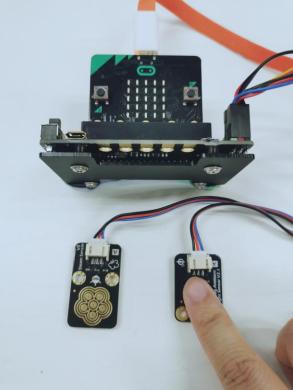
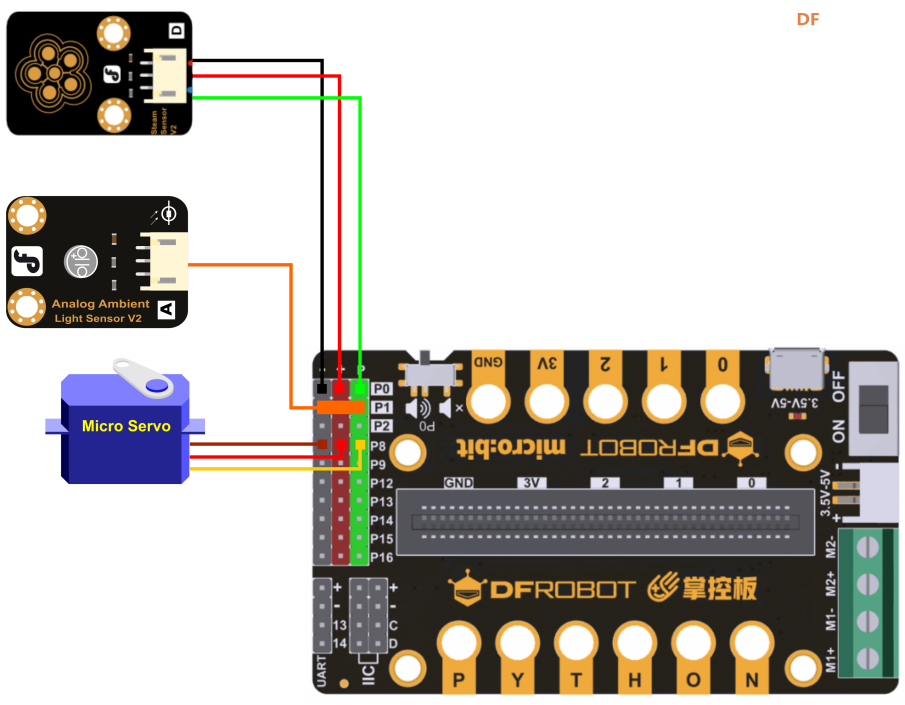
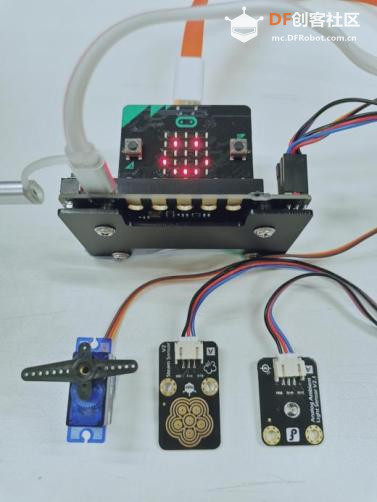
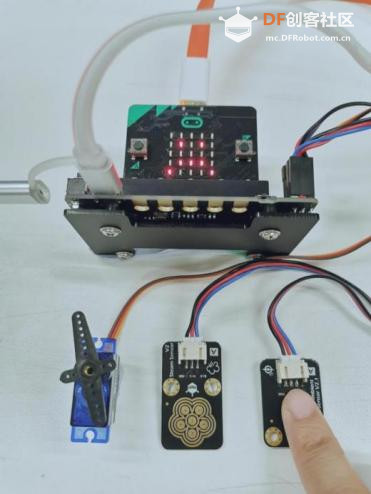
简介:基于PT550环保型光敏二极管的光线传感器,可以用来对环境光线的强度进行检测。通常用来制作随光线强度变化产生特殊效果的互动作品。 五、实践过程在本项目中,我们将利用水分传感器和光线传感器,分三步设计一个智能晾衣装置,来实时检测水分和环境光线,并利用舵机实现智能收衣的功能。 1、实时检测水分和环境光线 任务1:水分与环境光实时检测1、硬件搭建STEP1:将micro:bit开发板插入I/O扩展板,注意正反,LED点阵屏朝扩展板的“micro:bit”图标方向 STEP2:通过传感器连接线将水分传感器和光线传感器分别连在扩展板的P0和P1端口。其中,红线和黑线分别对应电源正极和负极,蓝线对应信号线,用来传输信号。 > 注:使用水分传感器时,只有金属花朵部分可以接触水,其他部位不可接触水,否则可能烧毁硬件。
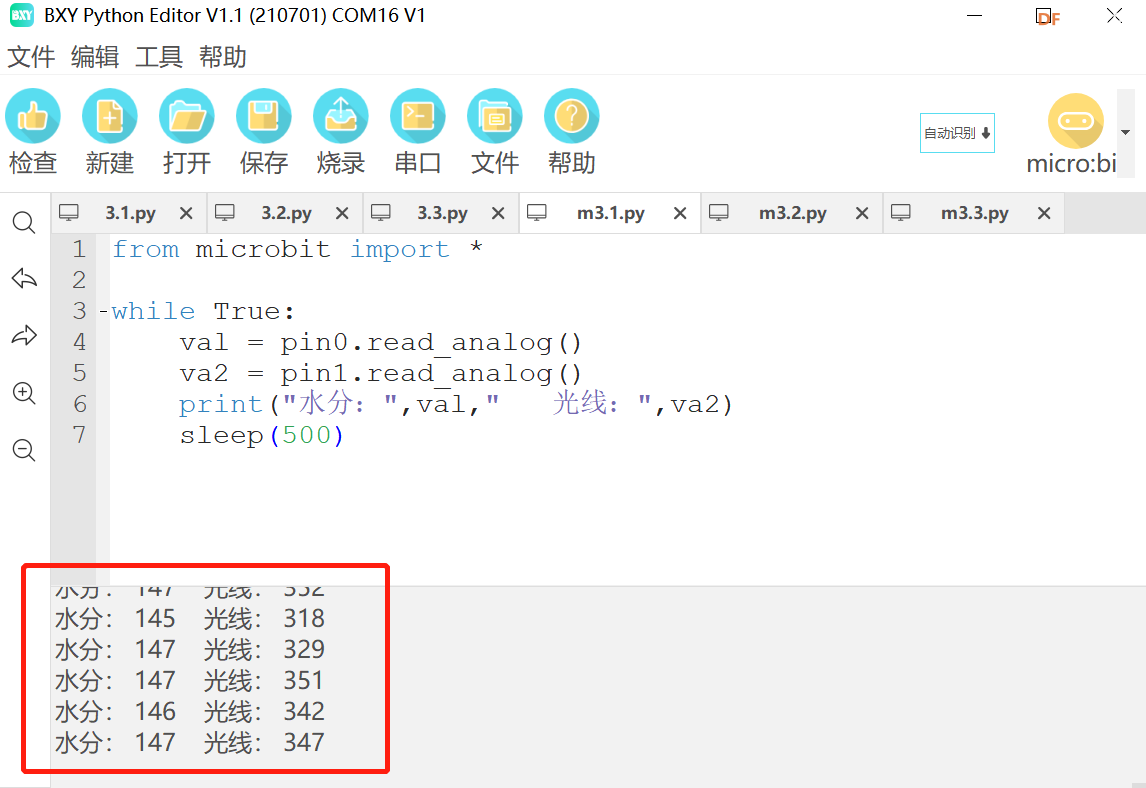
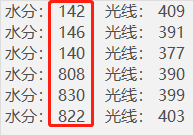
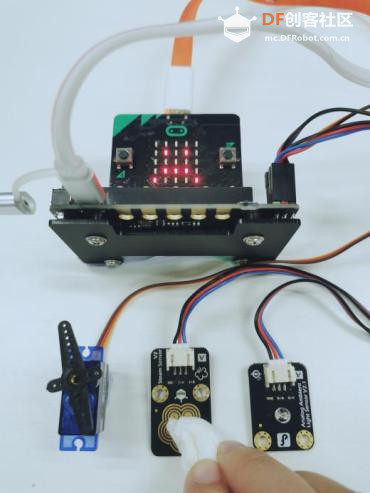
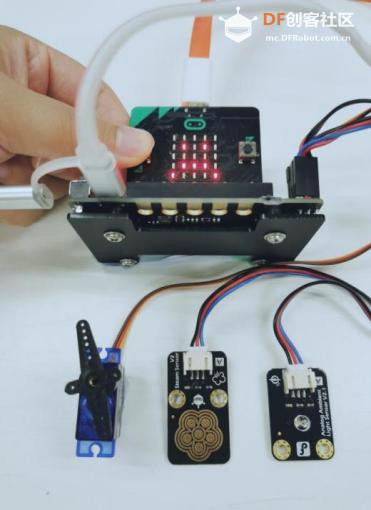
STEP3:通过USB连接线将micro:bit接到计算机。 2、软件编写STEP1:软件设置 1、创建与保存项目文件 (1)启动BXY编程软件,选择主控类型“micro:bit”。 (2)新建项目,保存并命名为“m3.1”。 STEP2:程序编写 3、运行调试STEP1:点击“烧录”上传程序并观察终端 STEP2:将湿纸巾放在水分传感器的金属花朵上
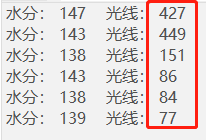
STEP3:用手遮住光线传感器
任务2:舵机动起来在上个任务中,我们已经完成了对于水分和环境光的实时检测,接下来,我们将在此基础上添加舵机并使其转动。 1、硬件搭建STEP1:通过连接线将舵机连在扩展板的P8端口。
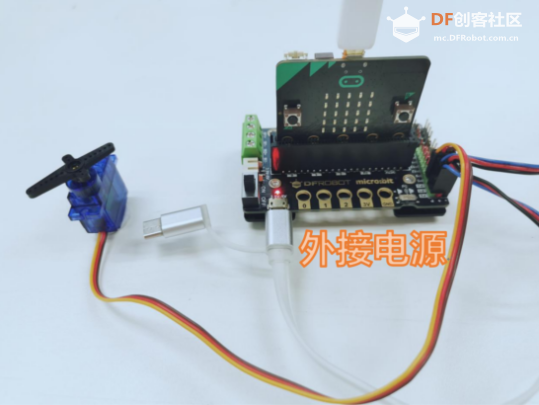
2、软件编写STEP1:软件设置 STEP2:程序编写 3、运行调试STEP1:外接电源 STEP2:点击“烧录”上传程序,并观察效果 任务3:智能收衣在之前的两个任务中,我们已经完成了对水分和环境光的实时检测,也实现了控制舵机转动。因此接下来,我们将使两者结合起来。当检测到的水分变大,光线变暗时,控制舵机转动,模拟收衣的功能。 1、软件编写STEP1:软件设置 STEP2:程序编写 3、运行调试STEP1:点击“烧录”上传程序,并观察软件 STEP2:将湿纸巾放在水分传感器的金属花朵上 STEP3:用手遮住光线传感器 STEP4:按下板载A按键 六、延伸拓展思考: |

1.91 KB, 阅读权限: 10, 下载次数: 37



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed








 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







