|
12282| 5
|
[漂移驴车项目] 【项目】重拾漂移驴车项目-windowsPC端配置及GYM模拟器配置 |
|
本帖最后由 yoyojacky 于 2021-10-29 10:33 编辑 0x00前言 大家好~ 我是漂移菌AKA骑驴玩儿漂移,我们的重拾漂移驴车的项目正在如火如荼的秘密进行着,小伙伴们都很给力,目前我们已经通过团购的方式采购了13辆驴车套件,并已经开始准备第一次线上活动的事宜了。 在这里感谢昊男辛苦的联系微雪的老大给我们提供优惠套件! 我们的13辆车组成的车队目前还没有定下名字,大家曾戏称: 十三钗车队, 十三香车队,十三猛男车队,目前还在积极探索中,当然,这里面还有撒哈拉大野牛的1:10大脚车会成为车队的头车,也许。 在等待快递的期间,我们决定先做一些基础工作,根据驴车的官方文档,我们需要配置PC端的应用。 下方是官方参考文档的链接,英文好的可以去直接观摩。 参考链接:https://docs.donkeycar.com/guide/host_pc/setup_windows/ 0x01 为何要做PC端设置 这里我们要明白为啥要做PC端设置,PC端在整个驴车项目中起到了什么作用? 总的来说分两部分: 1. 加快模型的训练速度 驴车的训练模型最好在PC或者高性能的服务器上完成,生成模型的速度比树莓派上完成快很多。 2. 通过模拟器先行训练模型 驴车的模型可以在PC上先行利用GYM模拟器模拟,就像我们飞飞机的时候会用凤凰飞模拟器一样,利用模拟器我们可以得到很多的图片和油门,前轮角度的对应表 0x02 PC端可以是什么系统? 基本上PC端的应用支持了全系列的系统: 1. windows PC 2. Mac OS X 3. Linux 本贴是在windows 10 的64位系统上完成的,视频也是,苹果的系统上我估计要周末才可以有空测试。 Linux上配置起来会比较方便,基本都是命令行,但是所有的平台配置方法基本是一个套路的。所以只要会一个平台,其他的平台举一反三即可。 0x03 Windows下配置 windows系统下,可以采用三种方法配置:
推荐的是第一种方法,使用miniconda。 这里插播一下什么是miniconda? Miniconda是一款小巧的python环境管理工具,安装包大约只有50M多点,其安装程序中包含conda软件包管理器和Python。 一旦安装了Miniconda,就可以使用conda命令安装任何其他软件工具包并创建环境等。 一般可以进入miniconda的官网下载,下载版本最好选择python3的64位版本,即Miniconda3 Windows 64-bit ,(电脑是32位,则下载32位版本) 官网链接: https://docs.conda.io/en/latest/miniconda.html# 我的感觉就是,它很像virtualenv,会生成一个独立的虚拟环境,避免干扰系统的默认python环境,还能够进行python库的安装。 看网上有很多人会直接切换到清华源来加快下载速度,我昨天制作视频的时候,没有尝试切换源,导致下载时间超级长~ 大家下载完后可以 进入开始菜单栏中点击Anaconda Promot,通过conda命令进行Miniconda的安装和配置环境变量。以下通过conda命令进行安装和配置:为啥要配置清华源: 配置一个清华的镜像服务器,来解决conda下载文件速度慢的问题。 在Anaconda Promot中依次输入以下两条命令: 这个步骤我没有在视频里面体现,你们可以尝试一下,肯定会感觉丝滑很多。 这里请注意: 安装miniconda Python 3.7 64 位。 然后通过开始菜单打开 Anaconda 提示窗口,记得右击-更多-以管理员身份运行,别问我为什么。。。  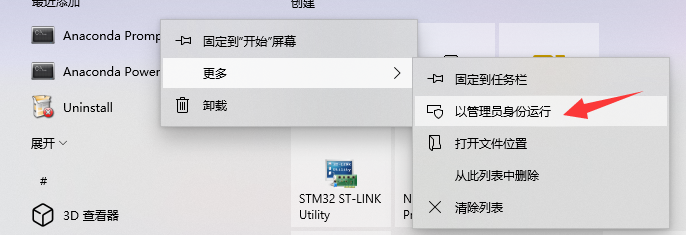 在窗口中输入git. 如果找不到该命令,则安装git 64位版本,链接如下:https://git-scm.com/download/win 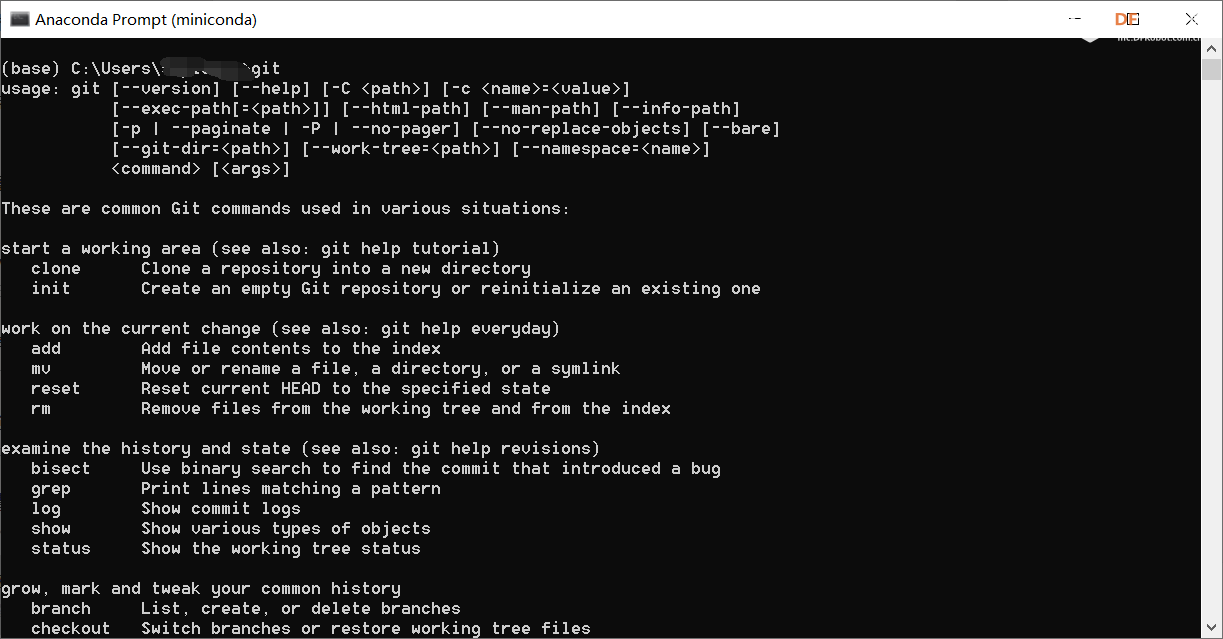 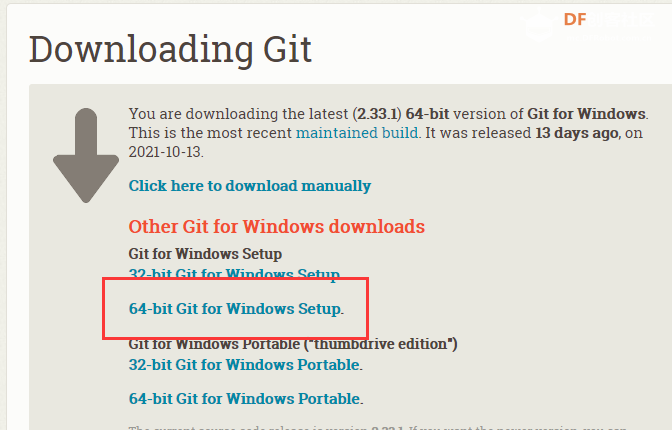 下载后直接按提示安装即可,记得勾选将git路径加入环境变量路径的选项。 然后切换到你空间比较大的存储盘,我算了一下,大概15GB左右。可能我还在录像,所以大一些的空间是有必要的。 例如切换到D盘并创建项目目录: 然后从 Github 获取最新的驴车的仓库,也可以通过gitee下载,链接换一下就行,我放在: https://gitee.com/yoyojacky/donkeycar 如果这不是第一次安装,请更新 Conda 并删除旧的驴车环境 利用conda命令创建 Python anaconda 环境: 官方提示可选择安装 Tensorflow GPU - 仅适用于 计算机包含了NVidia 显卡的环境,但是我遇到了无法安装的问题。如果你有Nvidia的显卡, 就需要更新到最新的驱动程序并安装 Cuda SDK的环境,我在尝试安装的时候,各种报错,所以就当作系统中没有Nvidia的显卡,直接跳过这个环节了。 创建本地工作目录: 注意:关闭 Anaconda Prompt 后,当再次打开它时, 需要键入conda activate donkey以重新激活虚拟环境,这样才能继续使用。 0x04 安装gym simulator 为啥要安装模拟器? 驴车还没到,物理设备没有,还不让模拟玩儿一下么?关键是模拟的训练起来不费劲,不然要跟着车跑。 官方文档链接:https://docs.donkeycar.com/guide/simulator/ 这里需要大家去github的这里:https://github.com/tawnkramer/gym-donkeycar 先下载最新的模拟器: 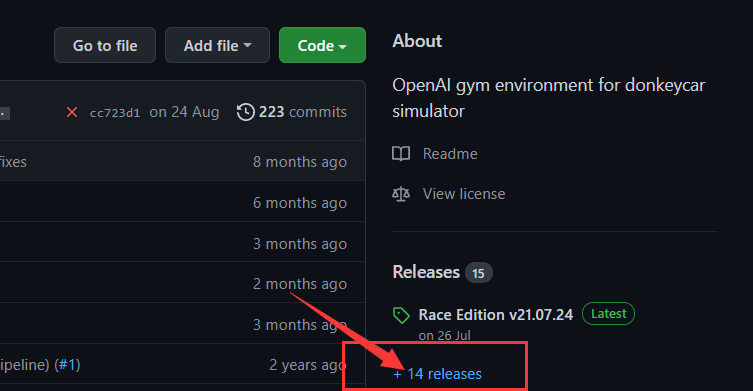  将其解压到你的project目录里面,这个模拟器是用unity开发的,如果有兴趣,可以尝试用unity基于它开发一个中文版的。哈哈 然后进入到你project目录: 利用pip安装依赖的python库,这里说起pip,我在安装的时候,遇到pip的一个问题,重新下载了get-pip.py安装后才顺利完成安装。具体看视频。 然后创建模拟器的环境,和驴车的差不多: 这里的sim路径根据你之前解压的路径填写,要绝对路径哦。 然后在conda的命令提示符里面输入: 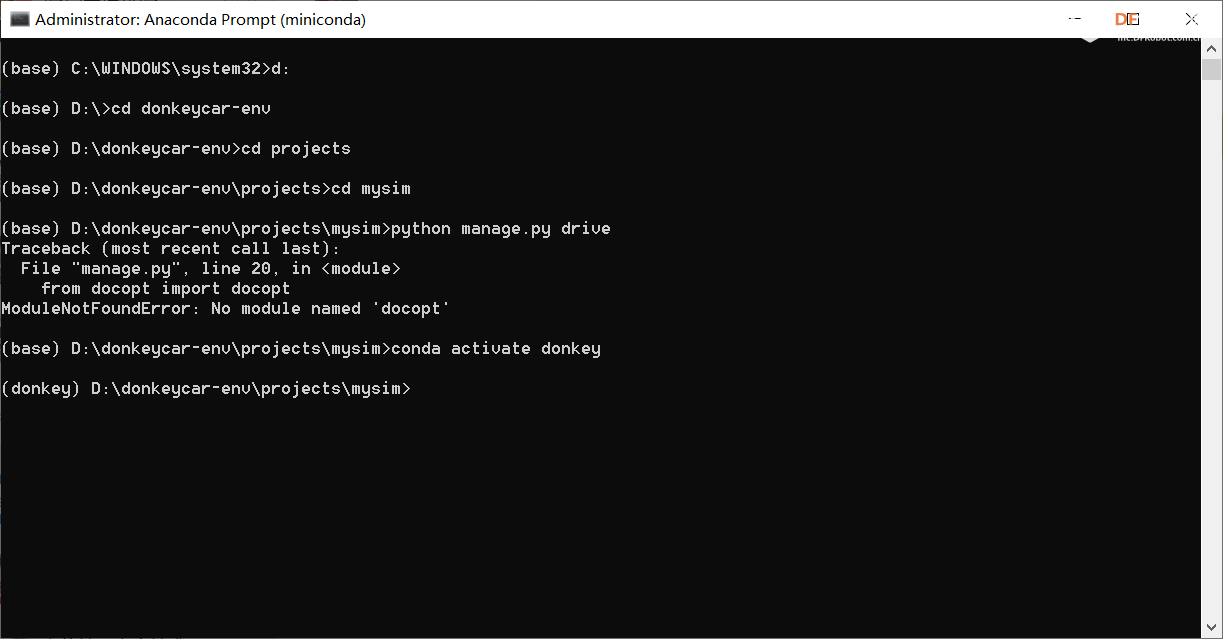 输入: 然后你就可以打开浏览器并通过: http://localhost:8887/drive 打开页面并开始尝试开车了,友情提示,油门选择15% 然后就可以通过 J K L I 四个键进行控制小车了。要在浏览器页面激活的状态下按键才有效哦。 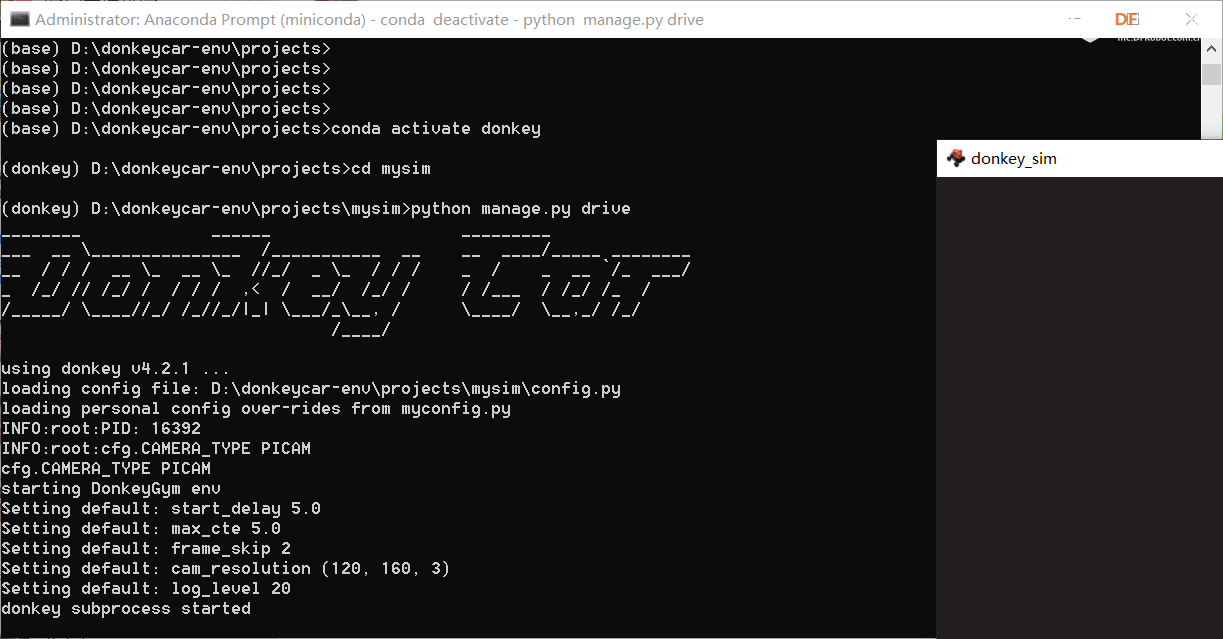 选择自己想要测试的场地  就可以通过网页控制小车了。  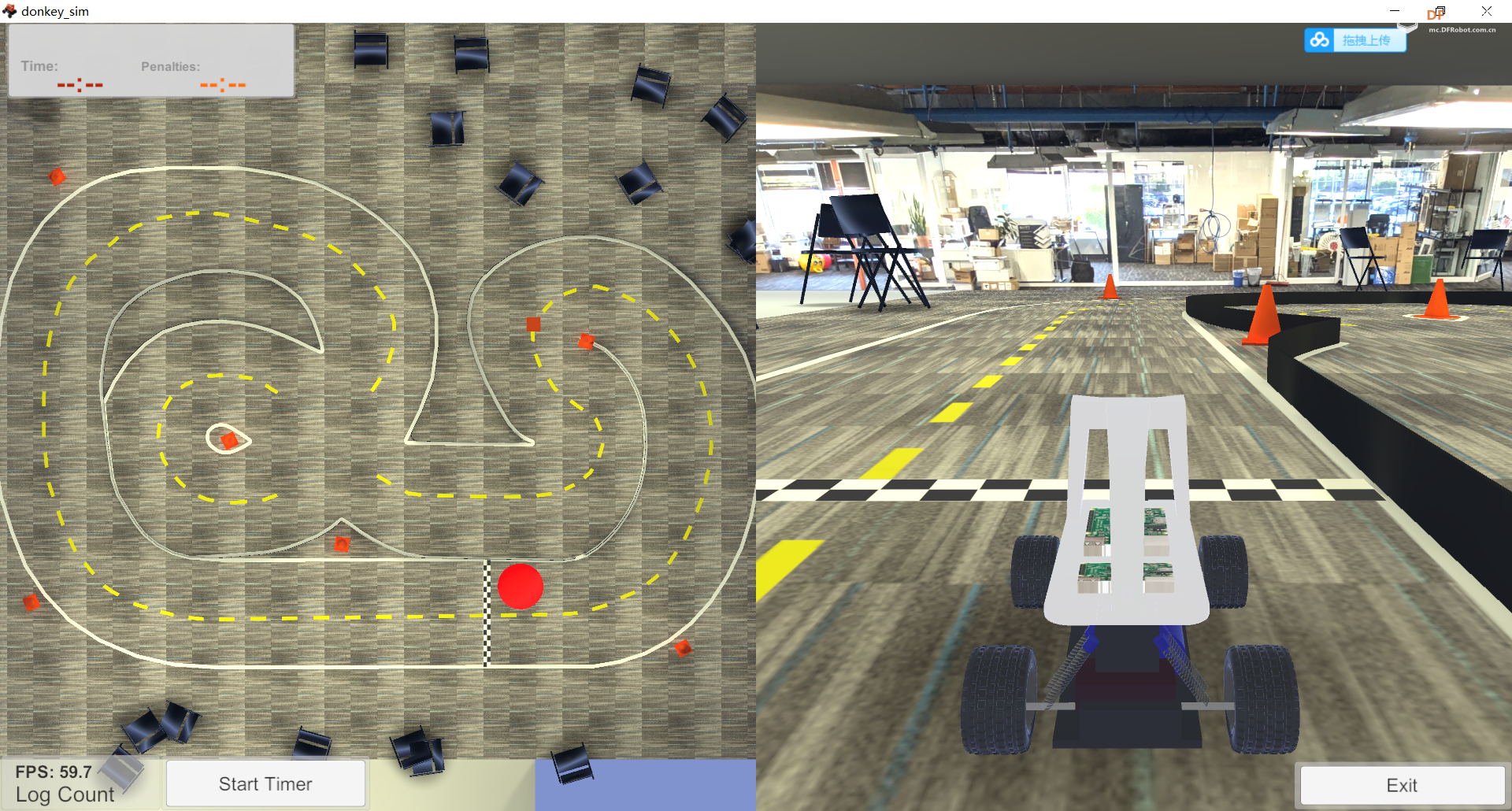  训练完ctrl+c退出后: 训练完ctrl+c退出后: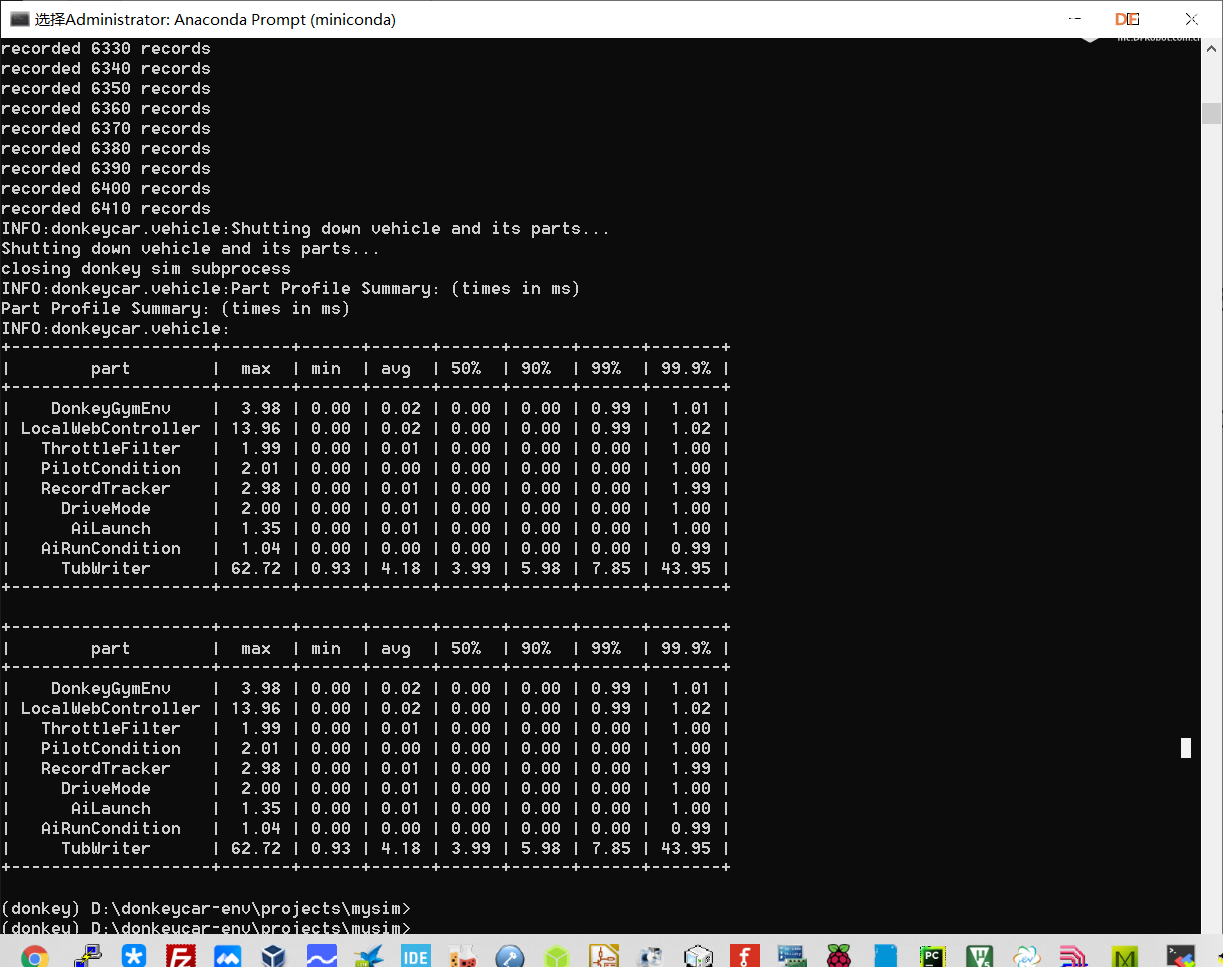 数据就放在data目录里面,就可以进行训练了,具体训练方法下个帖子讲解。今天就到这里啦! 视频比较长,可以酌情观摩: 好了,我是骑驴玩儿漂移,甩你三条街的男人。哈哈 白了个白~  |
|
本帖最后由 yoyojacky 于 2021-11-10 23:56 编辑 1. 找个大空间的盘,创建一个总体的项目目录.donkey-projects 2. 下载 miniconda3 python3.7 64bit 的版本,安装时指定到那个大空间的项目目录里面. 3. 安装 git 64bit 工具. 4. 在这个项目目录中创建一个目录 projects,然后通过git 工具将donkeycar 仓库拉下来.拉仓库的时候. 5. 设置 conda 清华源并更新: 然后去下载模拟器 DonkeySimWin.zip,就是我刚提供网盘,然后解压到 projects 目录, 然后下载 gym-donkeycar: 编辑 myconfig.py 保存,退出.(这里 sim 的 path 里面就是你从我百度盘下载的 DonkeySimWin 解压后里面的 exe 可执行文件. 然后执行: 训练完了想试试利用训练好的模型自动驾驶. 树莓派部分的操作因为涉及到小车的操作.因此需要多一个步骤,就是通过: 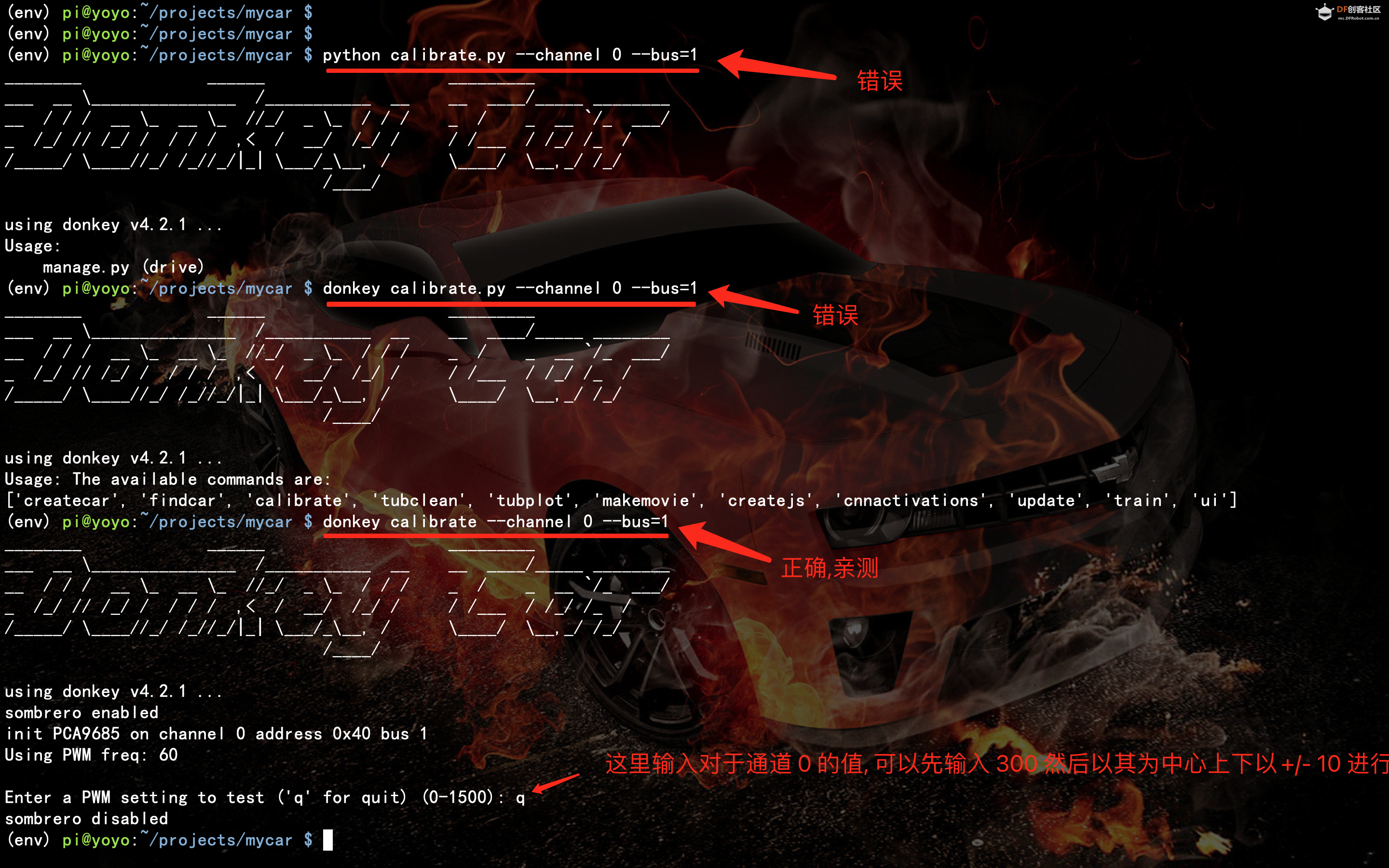 分别校准两个通道,校准通道的时候,请记录校准时填写的最大值和最小值, 默认我的配置文件如下,请不要直接使用,因为每个人的车的舵机都有些许差异,需要微调. 下面是我的 myconfig.py 的配置: 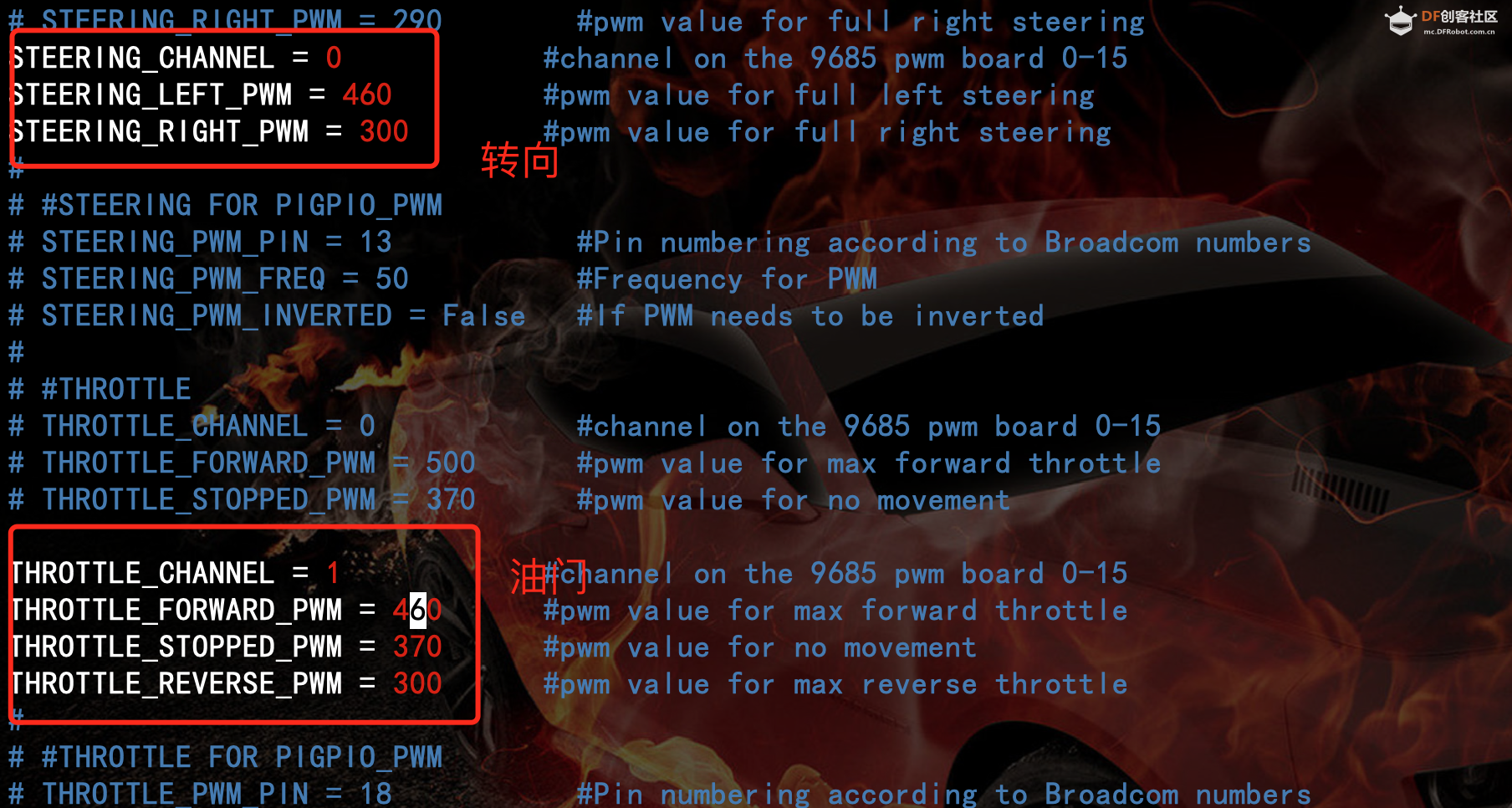 还有反转摄像头部分的参数: 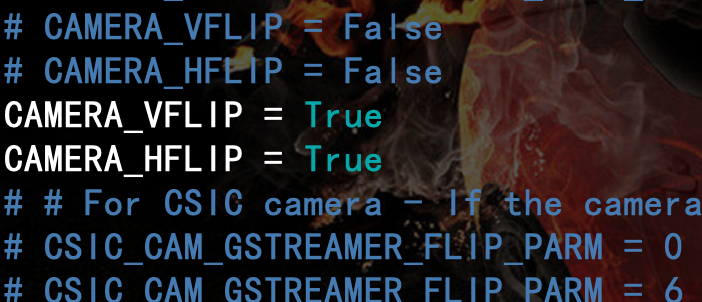 手柄部分:  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶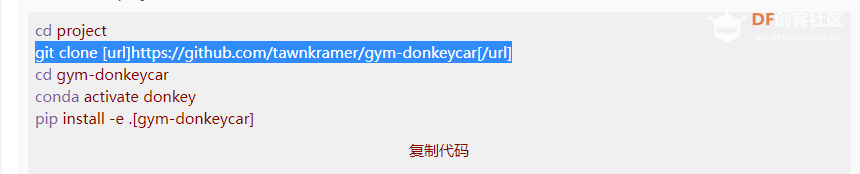

 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






