|
10959| 14
|
[漂移驴车项目] 【漂移菌】第八步:校准油门和转向 |
|
本帖最后由 yoyojacky 于 2022-4-30 22:10 编辑 我们需要通过校准油门和转向来保证我们的驴车运行正常,一般情况下,大家的参数不要调的区间太大。 咱们的驴车的板子是微雪提供的,不是普通的pca9685可以看到引脚的状态,我们接上去的时候PCB板的Servo和Motor分别代表了转向和油门的舵机。 我们将小车底盘架起,让其四轮悬空 如图: 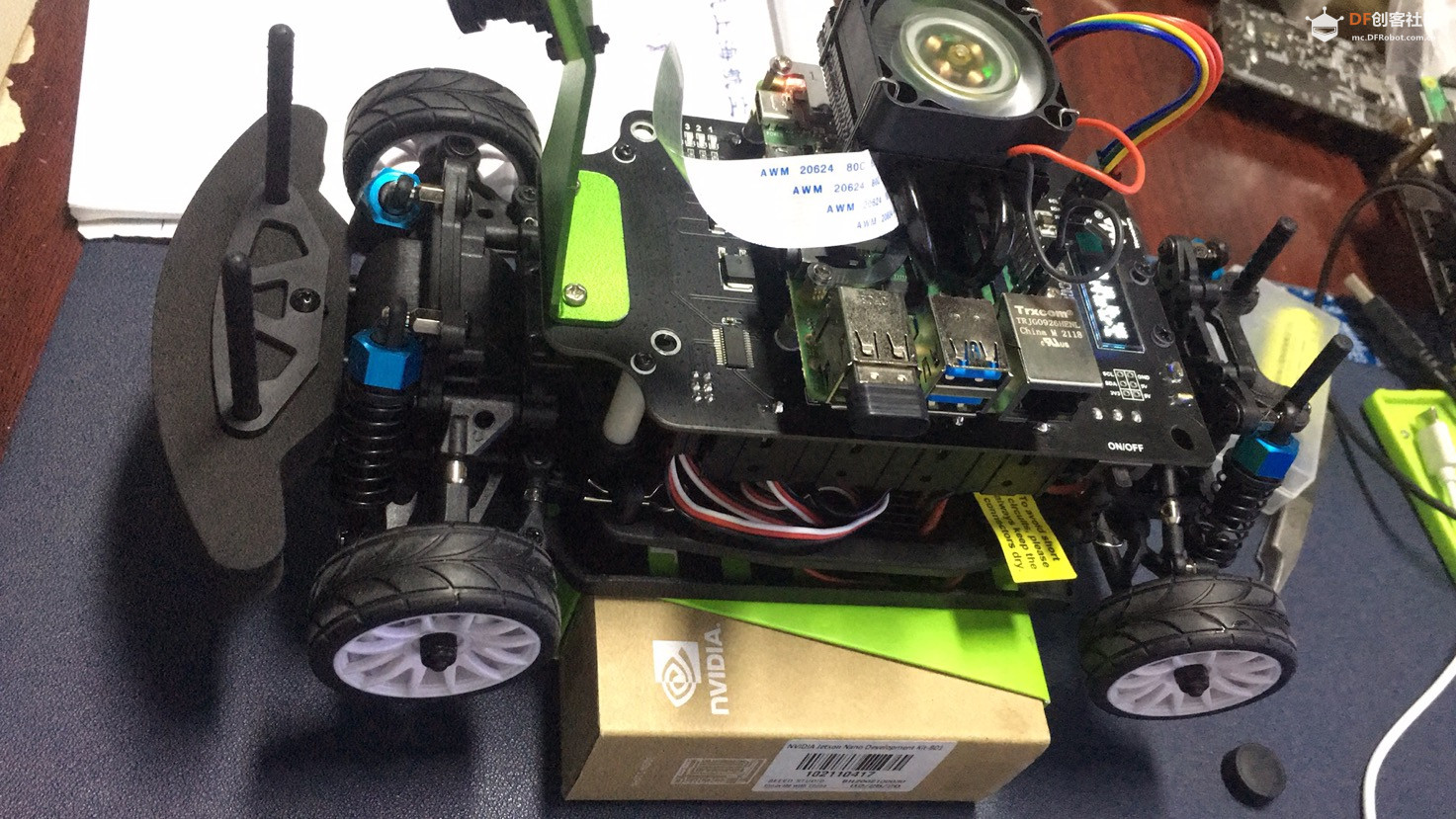 然后ssh远程连入树莓派,并进入驴车的目录中:  执行校准,先对通道0进行校准,命令如下: 我逐渐+10 当到达460时,舵机转向到最左边,再逐渐-10, 到达300时到达最右边。 所以我的左右方向的舵机从左到右分是460 ----》 380 《 ---- 300 . 将这几个数字记录下来,后面会用到。 然后校准油门。 停止时PWM的值是370. 顺利运动时是400 加速410 再快点儿420 能到470,不过太高速有可能撞坏设备,特别是刚开始你还不熟悉的时候。 然后记录好后,按下‘q’退出校准。 去编辑配置文件: myconfig.py 我把我的贴出来给大家看看,参照着改以下就可以打开遥控器来测试了。 转向部分: 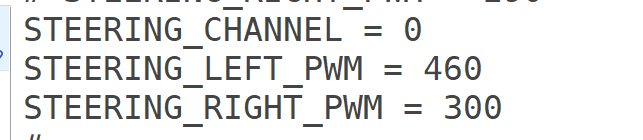 油门部分: 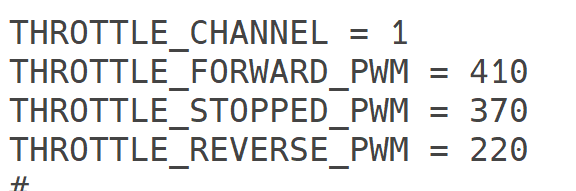 整个配置文件全部内容:请注意当前驴车版本, 下图是4.2.1 版本的 donkey 环境下 myconfig.py 的配置. 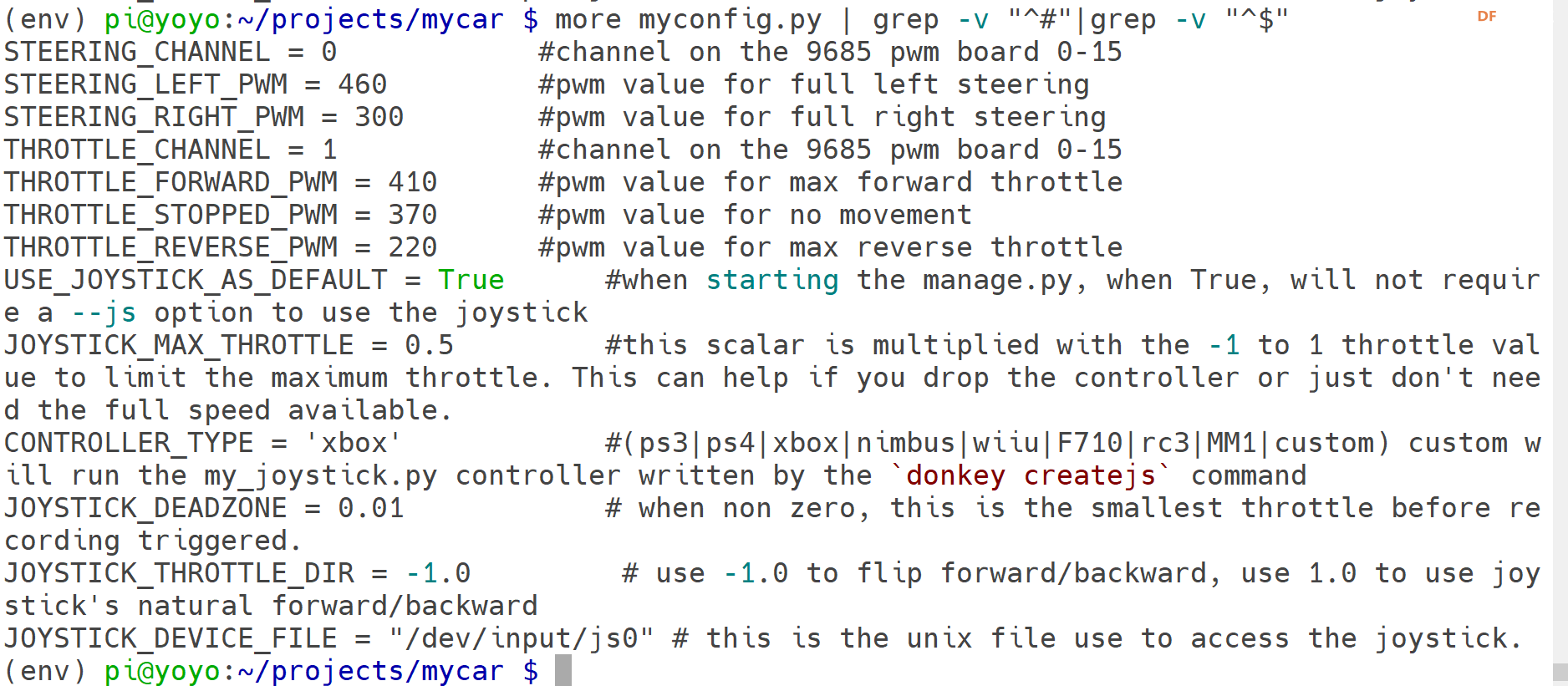 目前在新版本中已经弃用, 新版本记得修改配置文件类似下图: 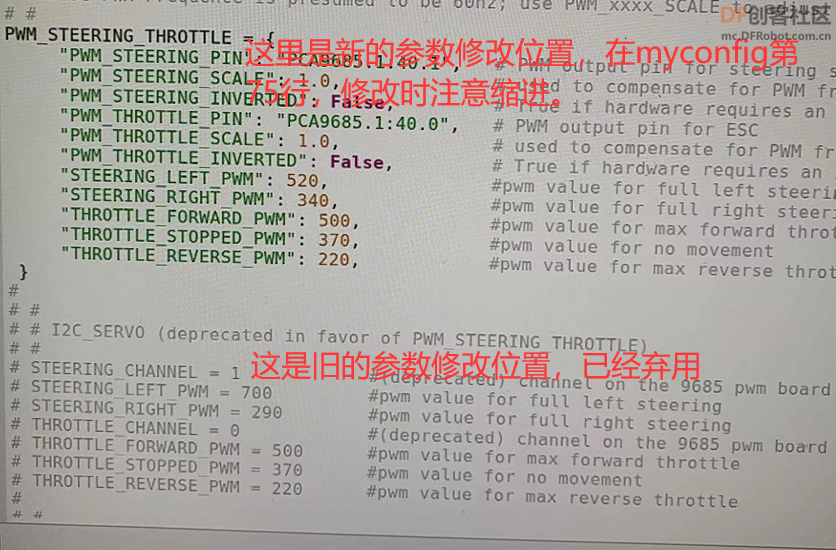 打开XBOX手柄背后的开关,然后运行:  就可以通过两个模拟摇杆进行油门和方向控制了。 左侧摇杆是方向, 右侧摇杆是油门。  好吧,稳稳的开吧,开完了把data目录的内容传回电脑,用电脑的环境进行训练。写不动了。。。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖






