|
26473| 1
|
[项目] 创客奶爸造物记 | 02 电动摇奶机 |

|
本帖最后由 怀若谷 于 2022-6-13 10:04 编辑 演示视频 【创作背景】 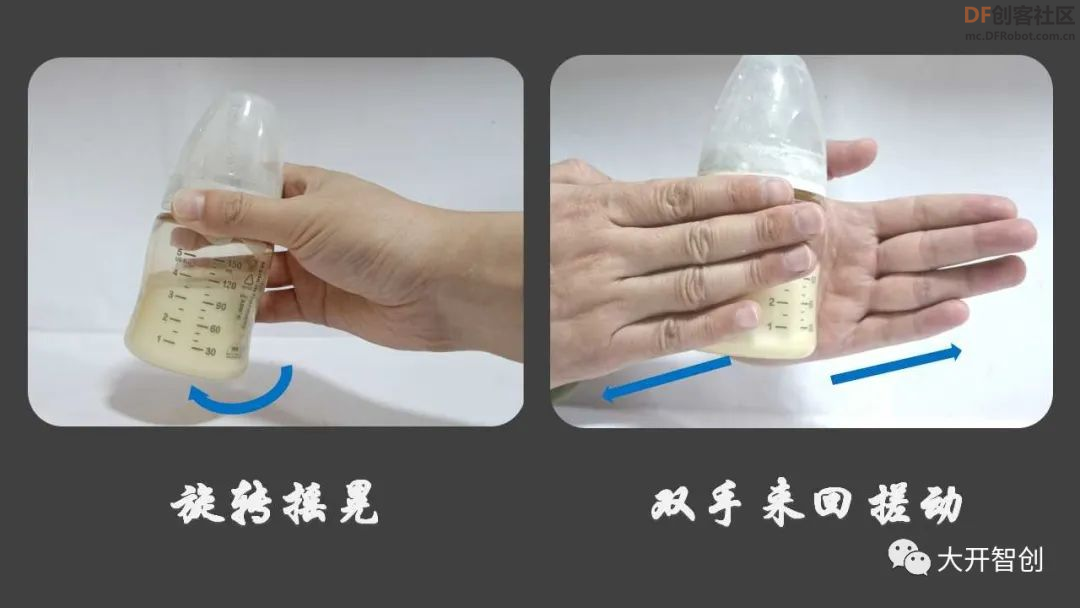 对于新手爸爸妈妈们,掌握正确的冲泡奶粉的方法是十分必要的。这其中包括水温控制、放奶粉和水的顺序、摇奶瓶等细节,学问可不少。今天,来说说怎么摇奶瓶的问题吧。很多爸爸妈妈们,比较随意,甚至为了达到快速摇匀的目的会采取大力上下或者左右摇晃的方式去做。这样冲泡出来的奶粉一般会产生大量气泡,宝宝喝后容易出现吐奶和腹胀的现象。向大家推荐两种摇法:(1)以手腕为圆心,轻轻摇动奶瓶,直至奶粉充分被溶解;(2)双手手掌夹紧奶瓶,来回地搓动。摇奶瓶后,如果还是出现了气泡,先把奶粉静置一会,待气泡消去之后再给宝宝喝。 从运动角度来分析,其实这两种摇法无非就是让奶和水在奶瓶内部以瓶子的纵向中心线为轴进行旋转。使用创客器材和技术,很容易制作出电动机器来代替手动操作。 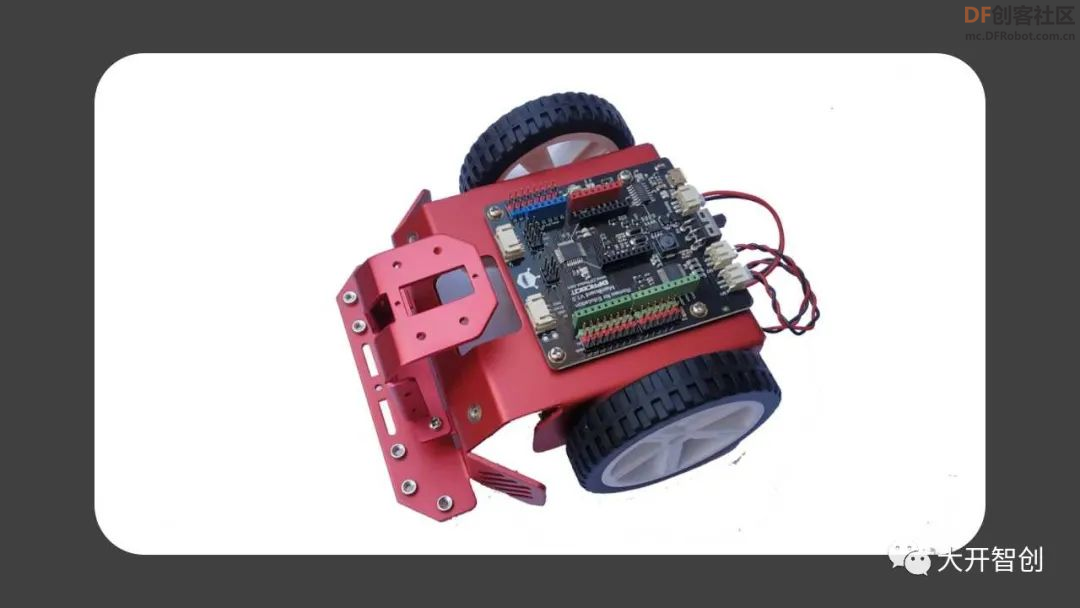 只要利用一个电机带动奶瓶旋转即可,就像电机带动车轮实现小车运动一样。于是我决定将一辆探索者小车拿出来改造一下。这辆小车正好是可以通过红外遥控控制的,索性就制作一个遥控版的电动摇奶机。 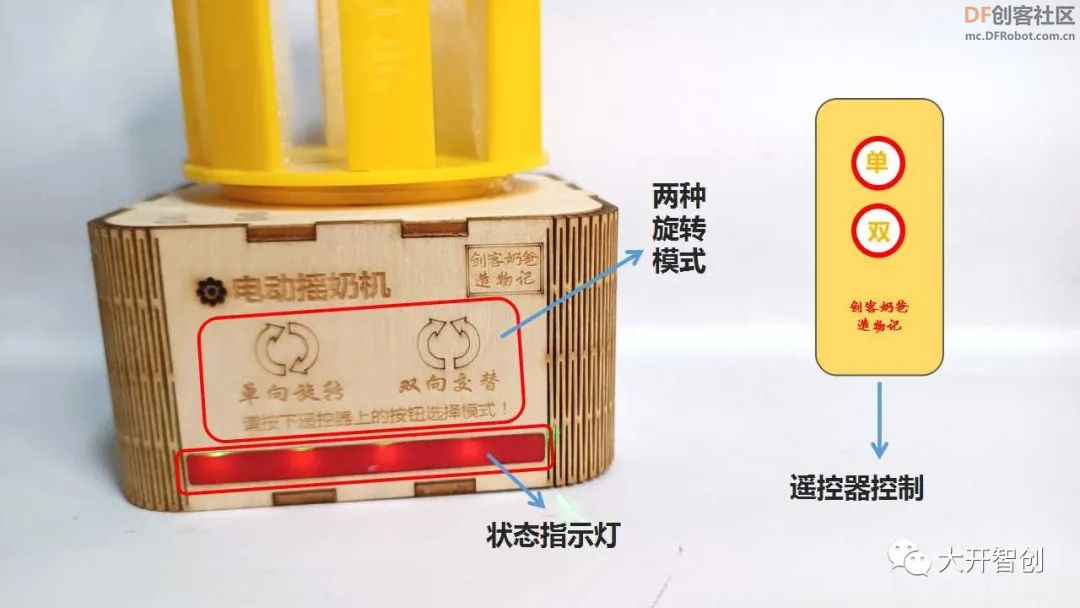 电动摇奶机的功能就是以旋转的方式进行摇奶,在节省人力的同时使得摇奶效果更为理想。在设计上考虑到了三个具体功能:(1)机器有两种旋转模式可选:单向360°旋转和双向交替360°旋转;(2)机器启动及两种模式的选择由遥控器控制,按下按键后电机工作一段时间(通过编程自行设定)后自动停止;(3)装配了一条彩色灯带作为工作状态指示灯,机器电源打开后会显示绿灯,两种旋转模式下工作都会有相应的指示灯亮起。 一、材料准备 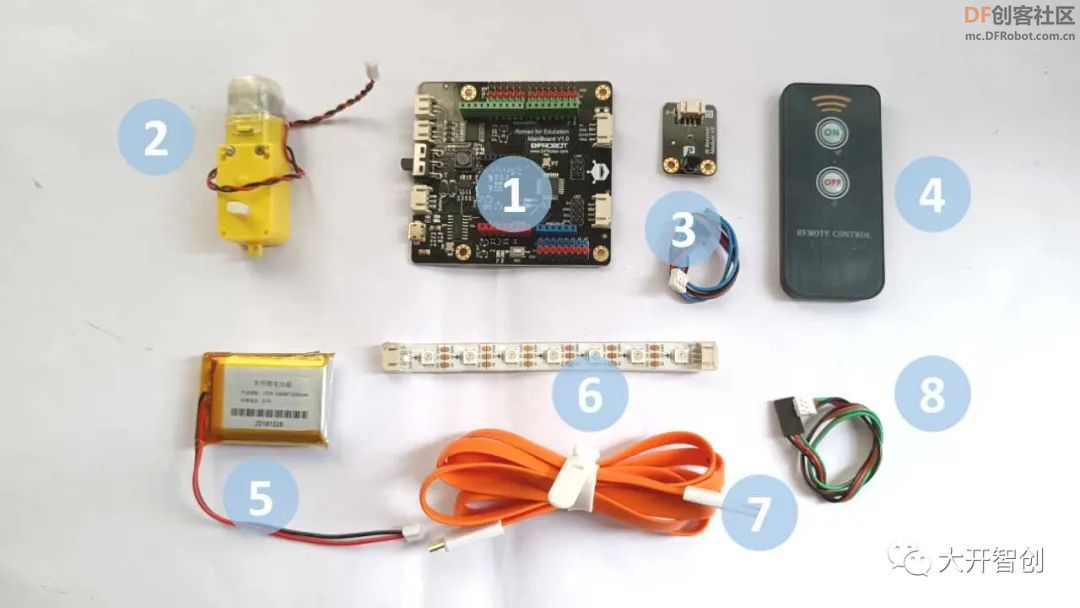 本项目使用了探索者小车的部分材料,具体有: 1.Romeo主控板 1块 (*兼容Arduino Uno) 2.TT马达 1个 3.红外接收模块 1个 4.红外遥控器 1个 5.锂电池 1块 6.WS2812灯带 1条 7.USB线 1根 8.3P连接线 2根  Romeo主控板集成了扩展板、电机驱动板,还设计有电池接口,进行硬件连接时比较简单,各个硬件模块连接的引脚如下: 红外接收模块——D2 RGB灯带——D9 TT马达——M1 三、编写程序 (一)读取红外编码  本项目的所有程序都是使用Mind+软件进行编写的。首先编写读取红外编码的程序并上传到主控板,然后打开串口连接,分别按下遥控器上的两个按键,通过Mind+集成的串口输出功能将对应的红外编码显示出来。  1.主程序:(1)初始化WS2812 RGB灯带;(2)循环执行:读取红外信号,如果读取到信号是对应的红外编码则执行相应的旋转模式子程序;如果没有收到有效的红外信号,则让RGB灯带保持显示绿色。  2.单向旋转模式子程序:(1)控制电机(TT马达)以指定速度和指定方向进行旋转;(2)使RGB灯带的LED灯呈现出流水灯的效果,流动方向和电机旋转方向保持一致;流水灯的执行时间正好是摇奶所需的时间;(3)在流水灯指令执行结束后,控制电机停止转动。 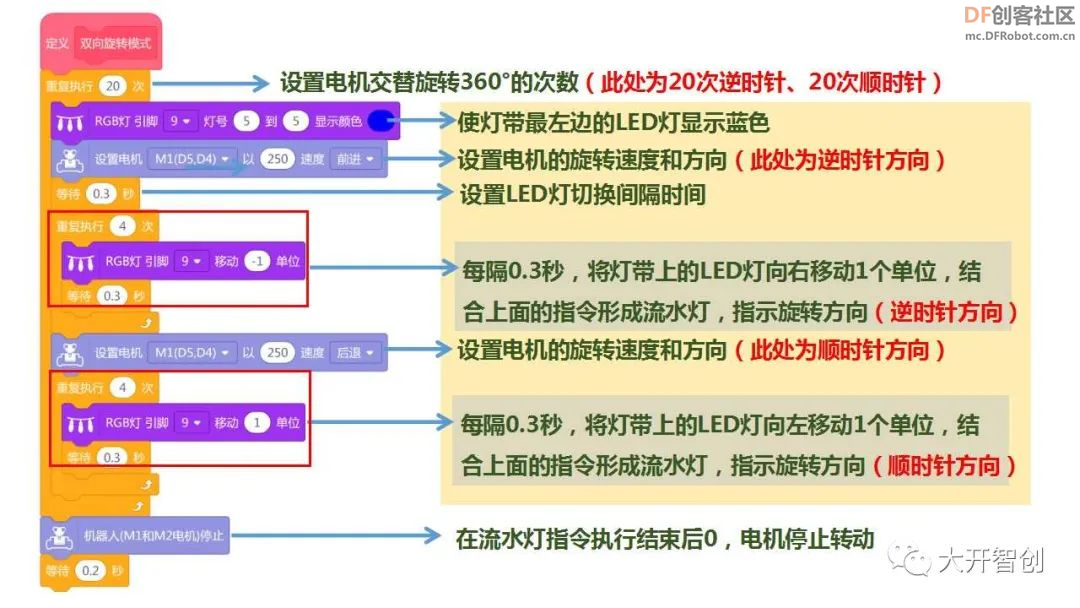 3.双向旋转模式子程序:(1)控制电机(TT马达)以指定速度逆时针旋转;(2)使RGB灯带的LED灯呈现出从左往右的流水灯的效果;(3)控制电机(TT马达)以指定速度顺时针旋转;(4)使RGB灯带的LED灯呈现出从右往左的流水灯的效果;(5)循环执行指定次数的交替旋转和相应流水灯指令后,控制电机停止转动。 (一)绘制图纸 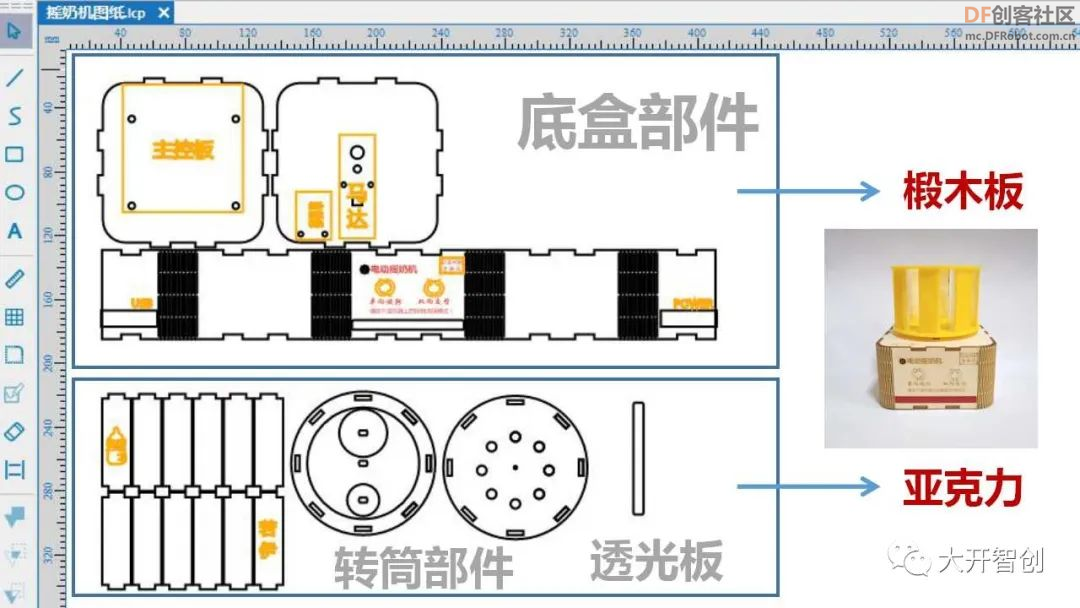 使用LaserMaker软件绘制结构和造型图纸。下面为一圆角盒子,使用3mm椴木板材料,盒子正面留有透光板安装口和红外信号孔,其他面设计有各种硬件材料的安装螺丝孔和开口;上面为一个类似于圆柱体形状的转筒,采用3mm亚克力板材料;透光板也采用亚克力材料。  使用激光切割机分别对椴木板和亚克力板材料进行切割加工,使用的加工工艺有切割、浅雕和描线等。切割好的全部部件如下图所示。 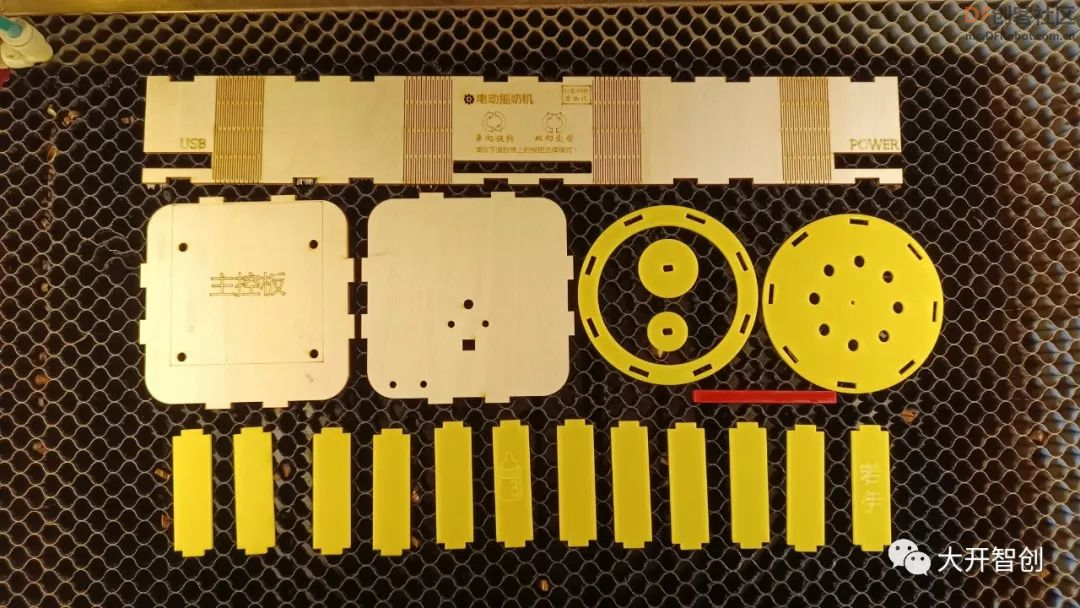  1.使用螺丝螺母将Romeo主控板固定在底盒的底板上; 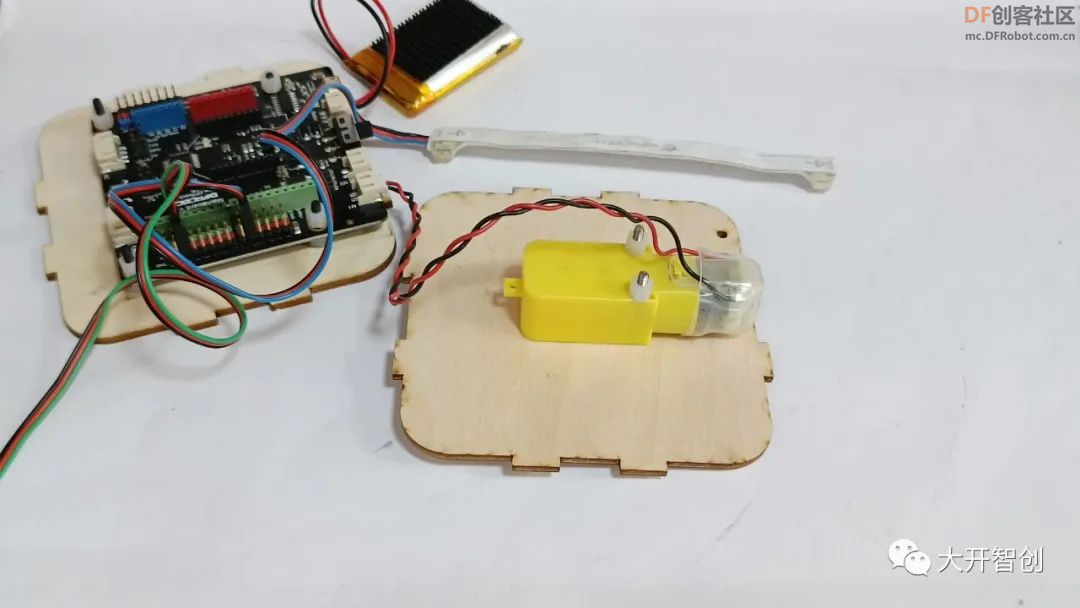 2.使用螺丝螺母将TT马达固定在底盒的顶板内侧; 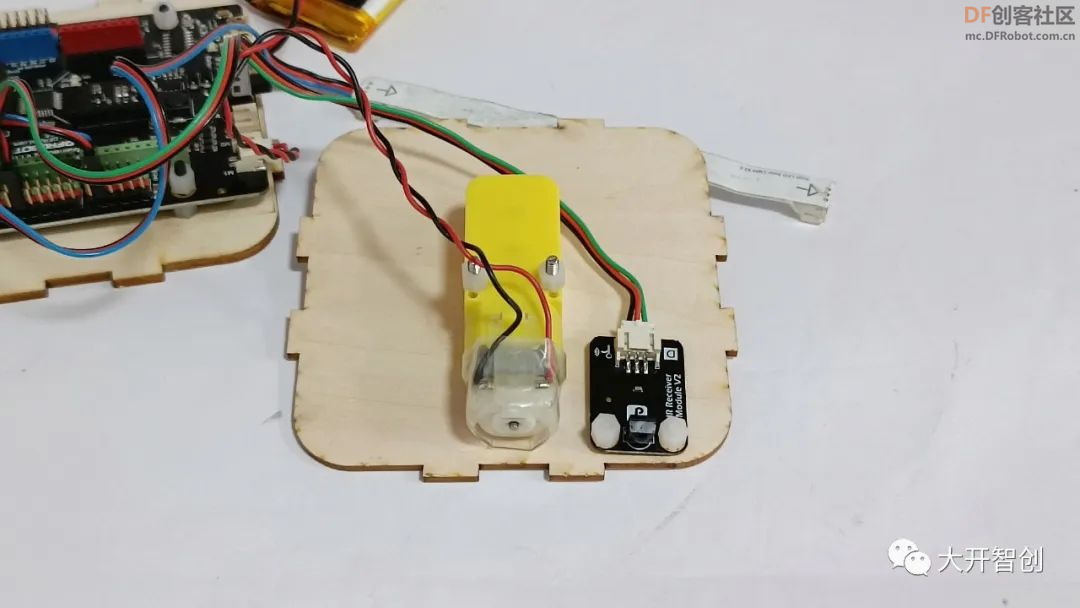 3.将红外接收模块固定在底盒的顶板内侧; 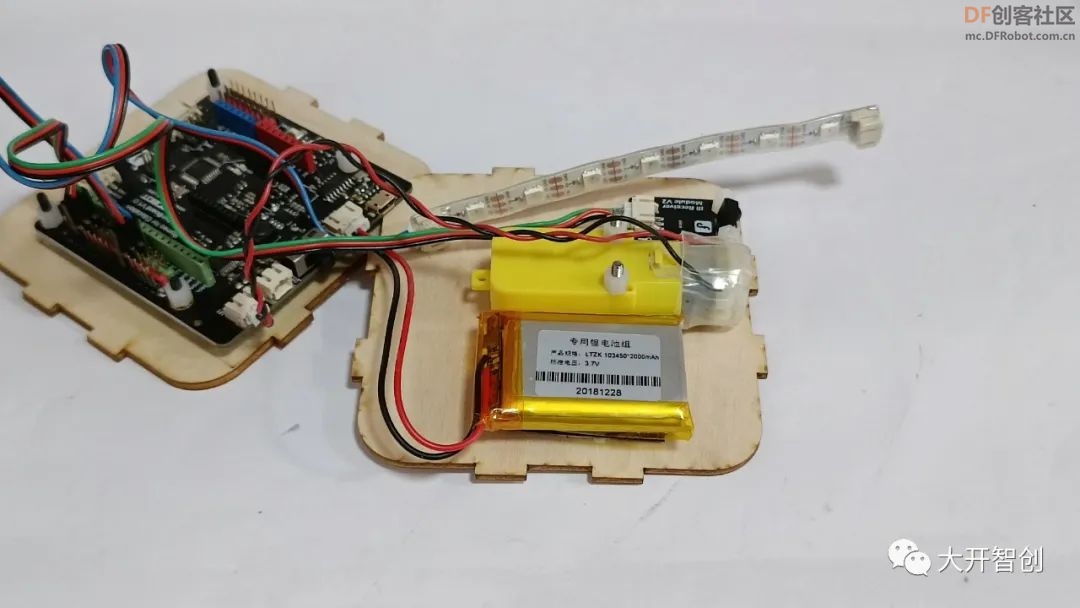 4.使用魔术贴将锂电池固定在底盒的顶板内侧;  5.将透光板放进底盒侧板预留口,使用热熔胶固定;  6.将底盒的底板和侧板进行组装; 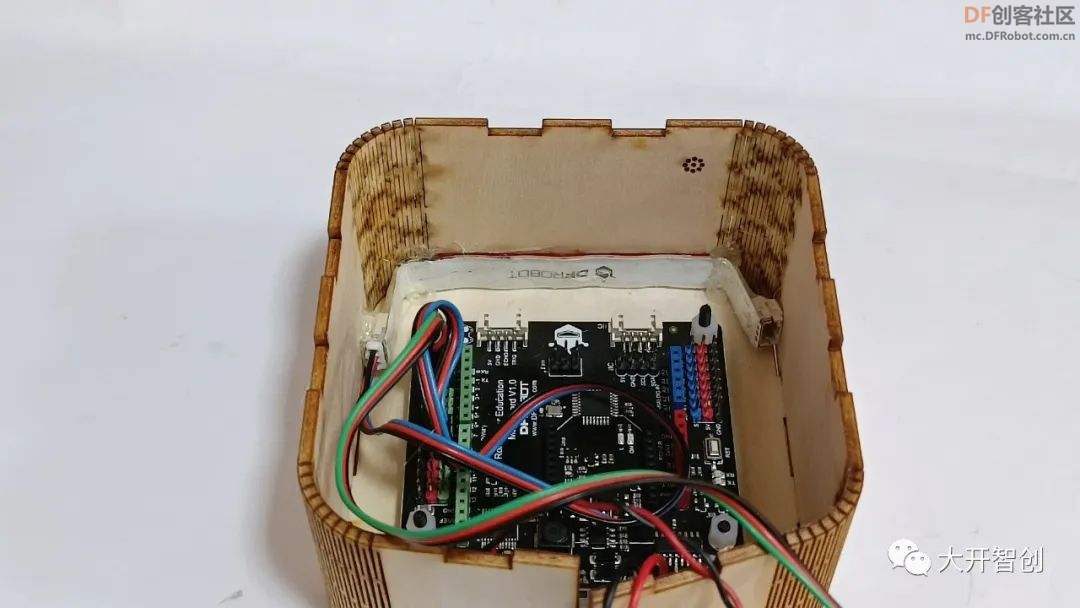 7.将WS2812灯带粘贴到透光板内侧;  8.盖上底盒的顶板;  9.将两片圆形亚克力垫片套在TT马达的转轴上;  10.将转筒的转盘粘贴在垫片上,并使用螺丝插入TT马达的转轴螺丝口进行紧固; 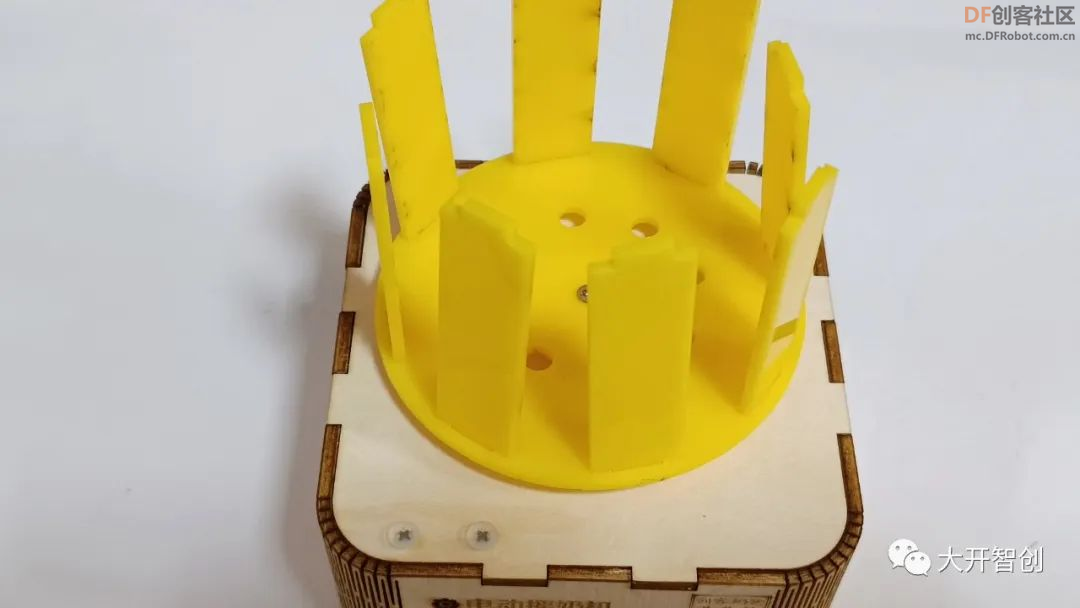 11.将8块挡板插入转盘的卯口,使用亚克力胶水粘牢; 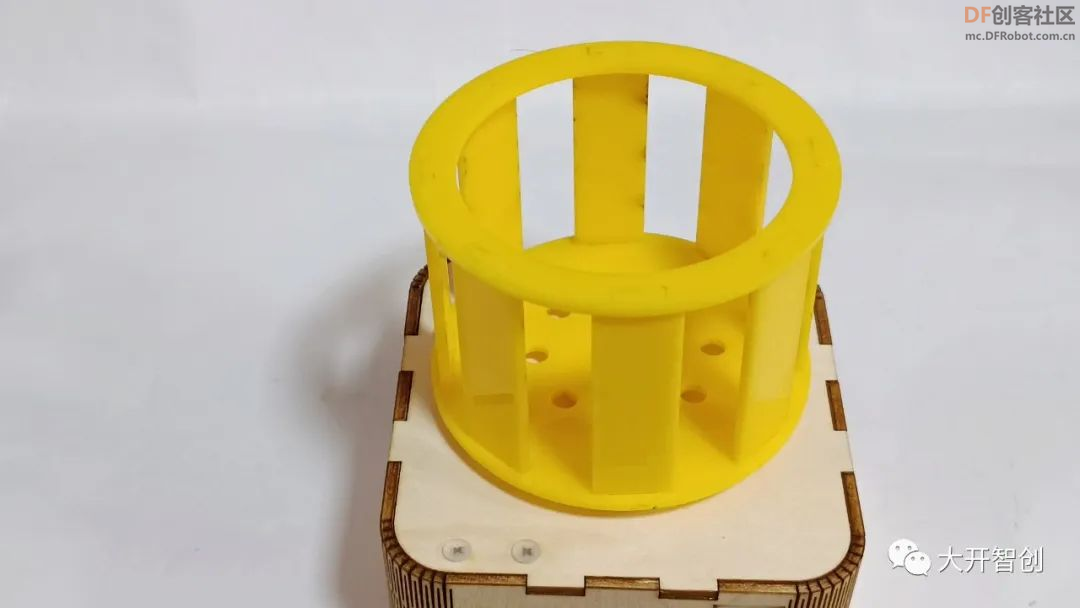 12.装上圆环形部件,使用亚克力胶水粘牢;  13.裁切8条与挡板尺寸相同的珍珠棉条,贴上双面胶;  14.将珍珠棉条粘贴在转筒挡板的内侧 六、制作遥控器贴纸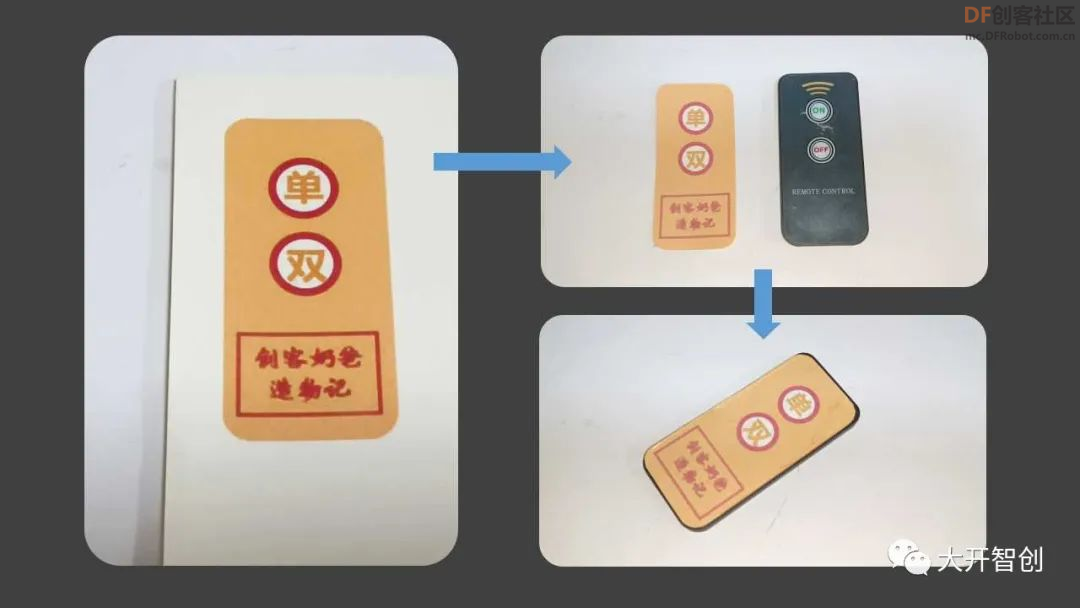 为遥控器设计一个面板样式,打印在不干胶打印纸上,裁剪后粘贴在遥控器上。  通电测试机器的各项功能,对有些程序参数进行修改优化,以达到更好的效果。我们还需要在多次实验后确定最佳摇奶时间和最理想的电机旋转速度,这些都没有现成的经验可以借鉴。在我本人的测试中,还发现转筒旋转时不够平稳,后来通过加大垫片面积、增加一个圆环轨道部件进行解决。 |
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








