|
7056| 33
|
【花雕学编程】Arduino动手做(223)---二相四线42步进电机 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十三:42步进电机二相四线+A4988驱动模块+设置扩展板 项目实验之八:驱动步进电机顺时针5圈和逆时针5圈 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十三:42步进电机二相四线+A4988驱动模块+设置扩展板 项目实验之九:使用AccelStepper库控制步进电机的步数或转数 实验开源代码 |
|
本帖最后由 驴友花雕 于 2024-7-22 11:32 编辑 代码的工作原理: 从定义步进和方向引脚开始,这里将它们连接到Arduino引脚3和2。 该语句用于为常量值命名。编译程序时,编译器会将对此常量的任何引用替换为定义的值。所以在你提到的任何地方,编译器都会在编译程序时将其替换为值 2。 这里定义了一个常量。驱动器设置为全步模式,所以将其设置为每转 200 步。如果设置不同,请更改此值 stepsPerRevolution。 在代码部分中,所有电机控制引脚都声明为数字输出,其功能为 setup()pinMode() 。 在代码部分,让电机在 CW 方向上缓慢旋转一圈,在 CCW 方向上快速旋转一圈。接下来,我们让电机高速向每个方向旋转 5 圈。那么如何控制速度、旋转方向和转数呢? 控制旋转方向: 为了控制步进电机的旋转方向,我们将 DIR(方向)引脚设置为高电平或低电平。为此,我们使用函数,根据步进电机的连接方式,将 DIR 引脚设置为高电平将使电机转动 CW 或 CCW。 控制步数或转数: 在此示例中,for 环路控制步进电机将采取的步数。for 循环中的代码导致步进电机的 1 步进。由于循环中的代码执行了 200 次 (stepsPerRevolution),因此会导致 1 次旋转。在最后两个循环中,for 循环中的代码执行 1000 次,这导致 1000 步或 5 转。 请注意,可以将 for 循环中的第二个项更改为所需的任何步骤数。 将导致 100 步,或半圈。 控制速度: 步进电机的速度由发送到STEP引脚的脉冲频率决定。频率越高,电机运行速度越快。可以通过更改代码来控制脉冲的频率。延迟越短,频率越高,电机运行速度越快。 |
|
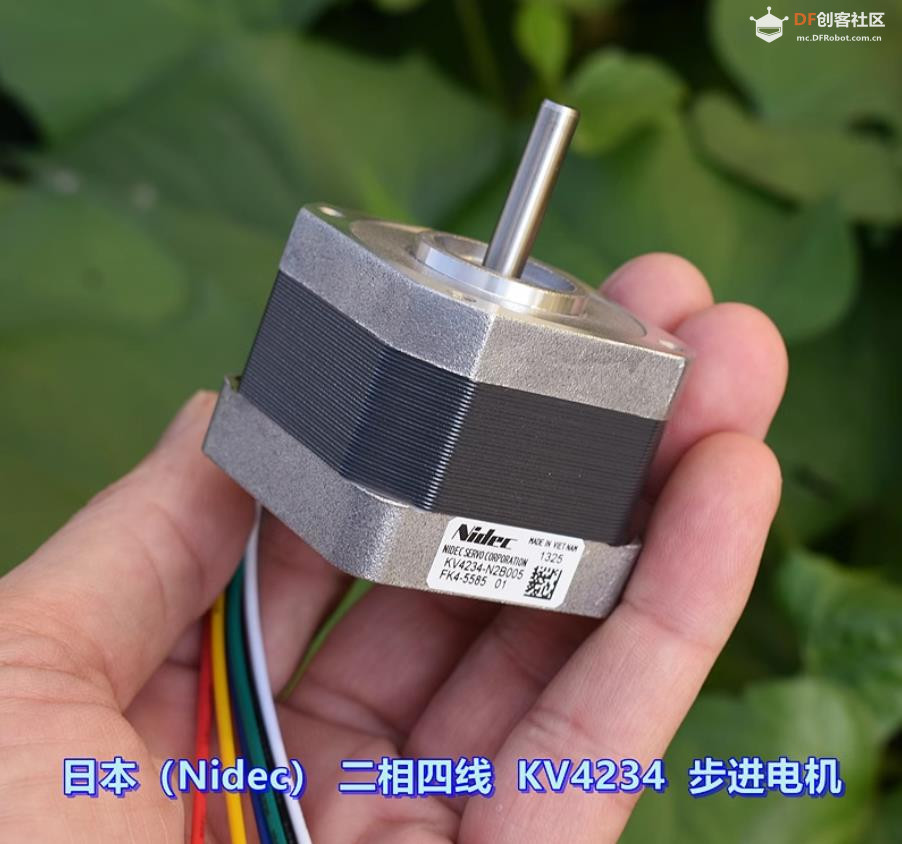
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十三:日本(Nidec)二相四线 KV4234 步进电机 步进角1.8 度 5MM圆轴 项目程序之一:控制步进电机转动 实验开源代码 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十三:42步进电机+A4988驱动器 项目实验之三:正反向控制步进电机快慢转动 实验开源代码 |
|
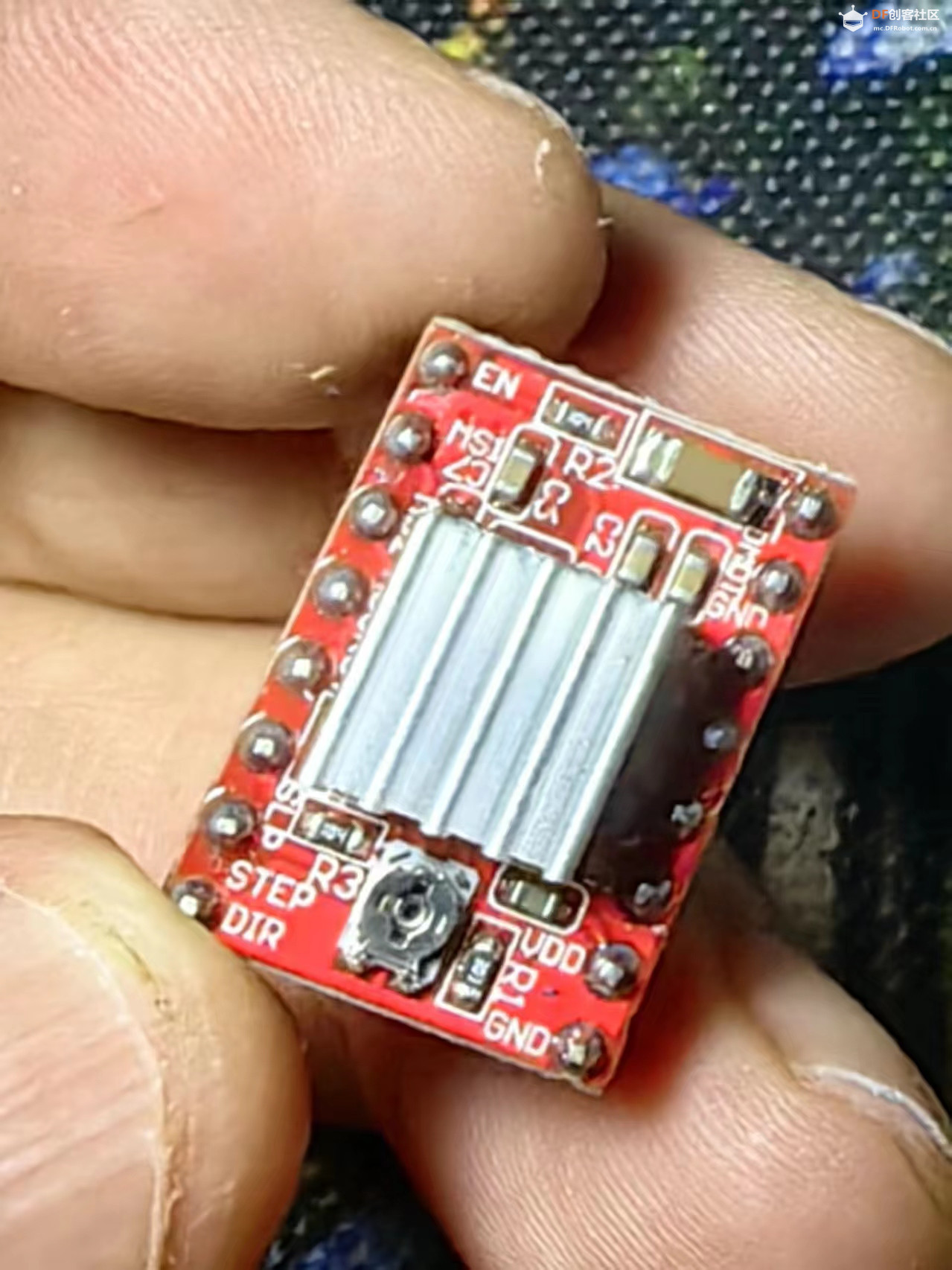
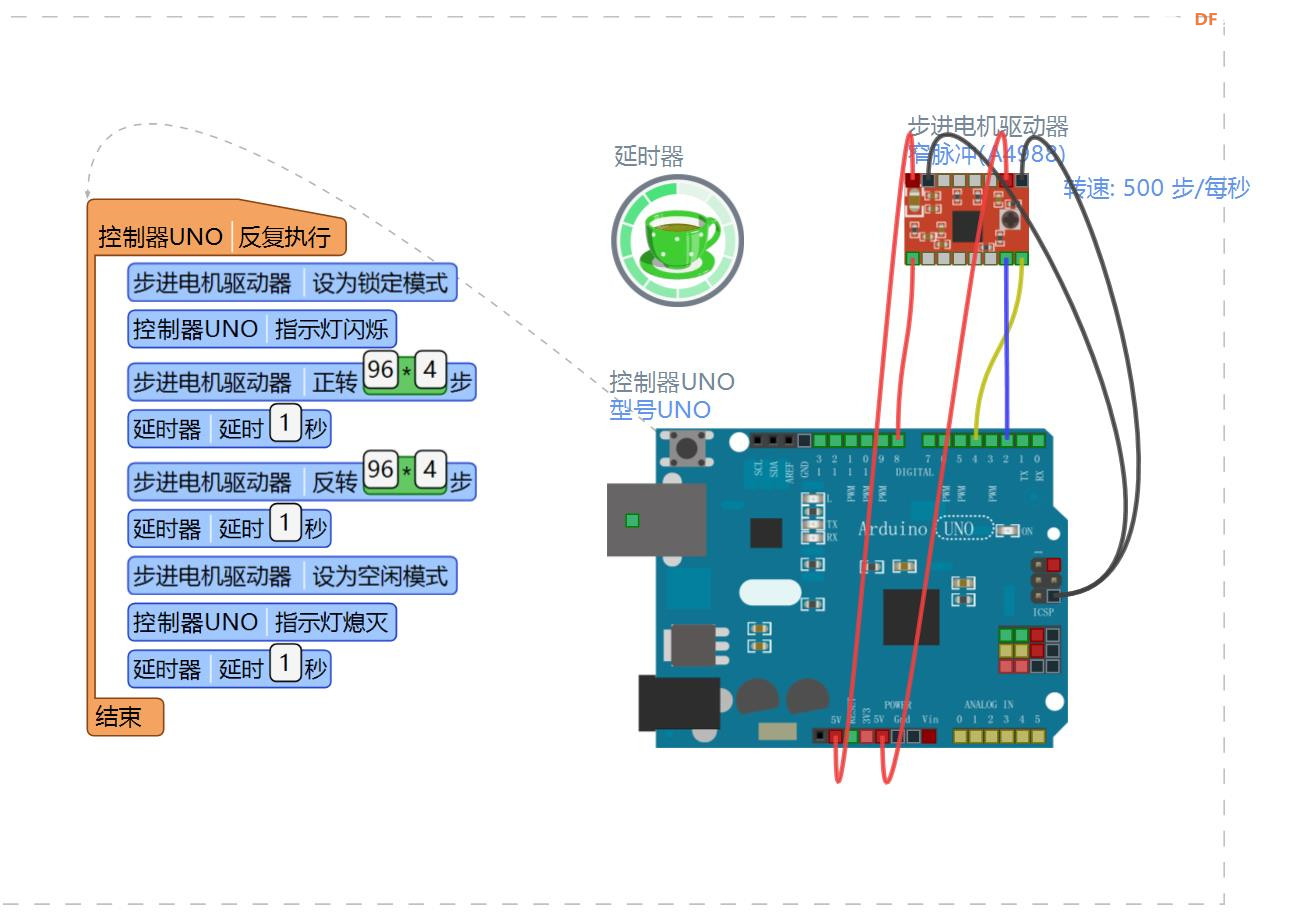
本帖最后由 驴友花雕 于 2024-7-20 21:05 编辑 连接表 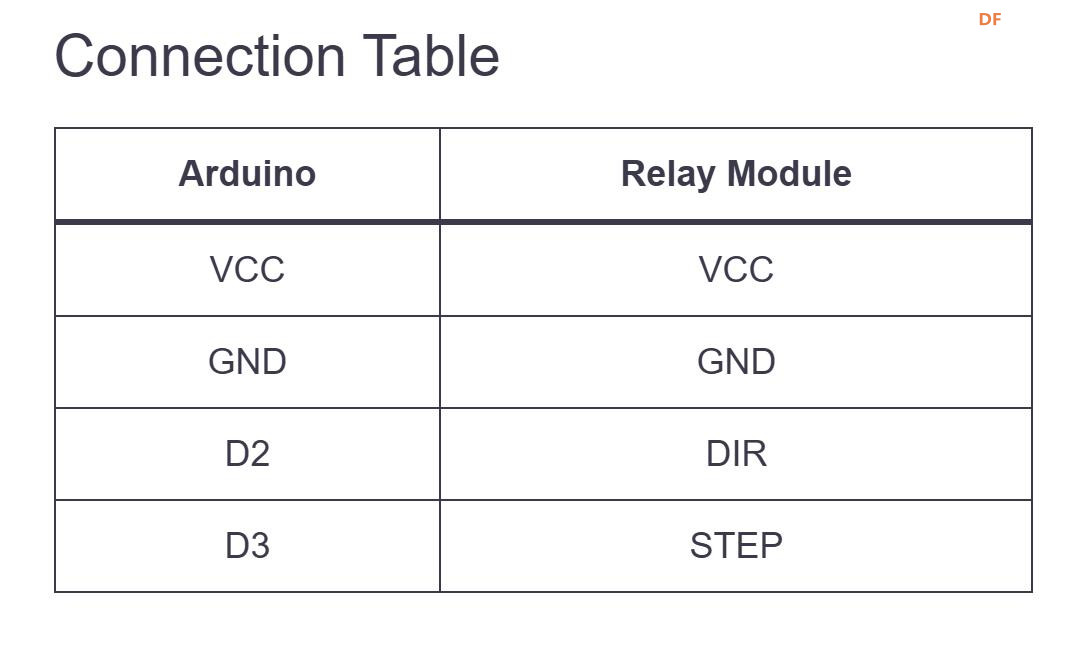 代码说明 1、我们首先定义了连接到 A4988 引脚的 Arduino 引脚。然后,我们定义了内容stepsPerRevolution,它包含电机每转完成所需的整数步数。 2、在空置设置中,我们将电机的控制引脚声明为输出。 3、在空隙回路中,我们将 DIR 引脚设置为高电平以顺时针方向旋转电机(要逆时针旋转电机,可以将 DIR 设置为低电平)。由于我们发送到STEP引脚的脉冲频率决定了电机的速度,因此我们将该引脚设置为高,然后设置为低。当脉冲较高时,电机运行得更快。 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百二十三:42步进电机二相四线+A4988驱动模块+设置扩展板 项目实验之四:步进电机的加速和减速控制 实验说明:步进电机的运动加速和减速,电机将以每秒 200 步的速度和每秒 30 步的加速度来回运行。 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶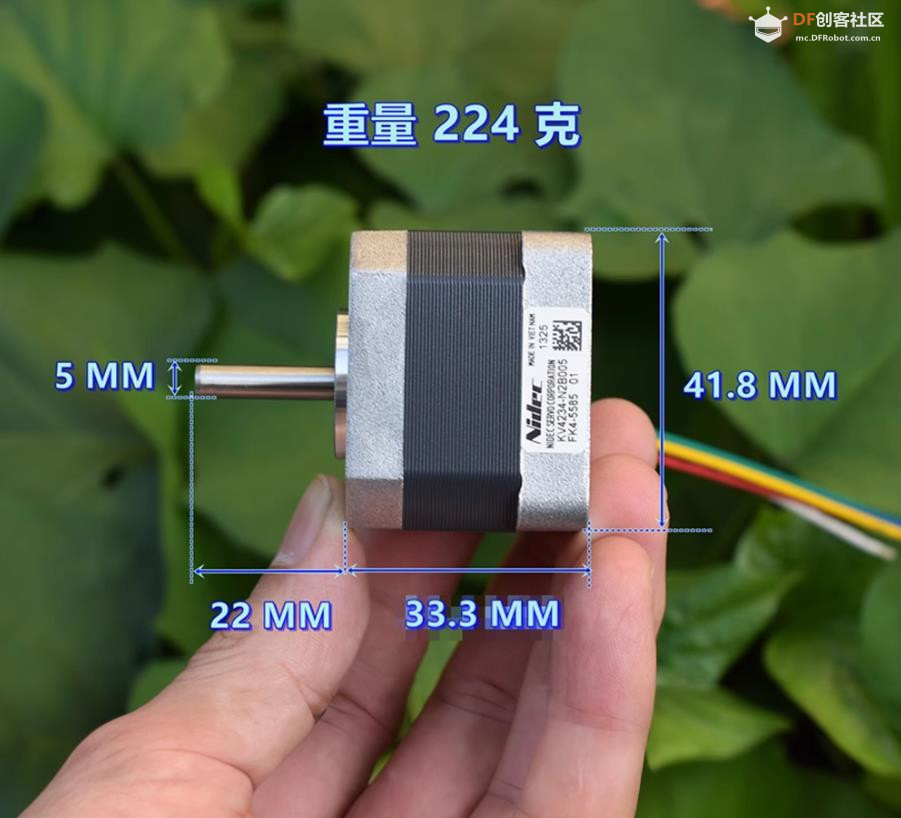










 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






