|
【项目背景】
- 随着人工智能技术的快速发展,语音识别技术已经广泛应用于智能家居、机器人控制、自动化系统等多个领域。在教育和娱乐领域,通过编程和电子硬件的结合,可以激发学生的创造力和实践能力,同时也为爱好者提供了一个有趣且富有教育意义的动手项目。
- 本项目旨在设计一个基于行空板K10和Mind+编程软件的智能语音控制小车。通过这个项目,用户可以学习到语音识别技术的基本原理,了解如何通过编程来控制硬件设备,以及如何将这些技术应用到实际的机器人或自动化系统中。
【项目设计】
- 项目的目标是创建一个能够响应语音命令的小车,它能够执行前进、左转、右转、后退和停止等基本动作。通过使用Mind+编程软件的Arduino C模式,用户可以编写代码来控制小车的电机,实现对小车运动的精确控制。此外,通过行空板K10的语音识别功能,小车能够识别和响应用户的语音指令,使得操作更加直观和便捷。
- 这个项目不仅适合作为学校STEM(科学、技术、工程和数学)教育的一部分,也适合作为个人爱好者的DIY项目。通过动手实践,用户可以深入理解语音识别和机器人控制的工作原理,同时也能够享受到创造和编程带来的乐趣。
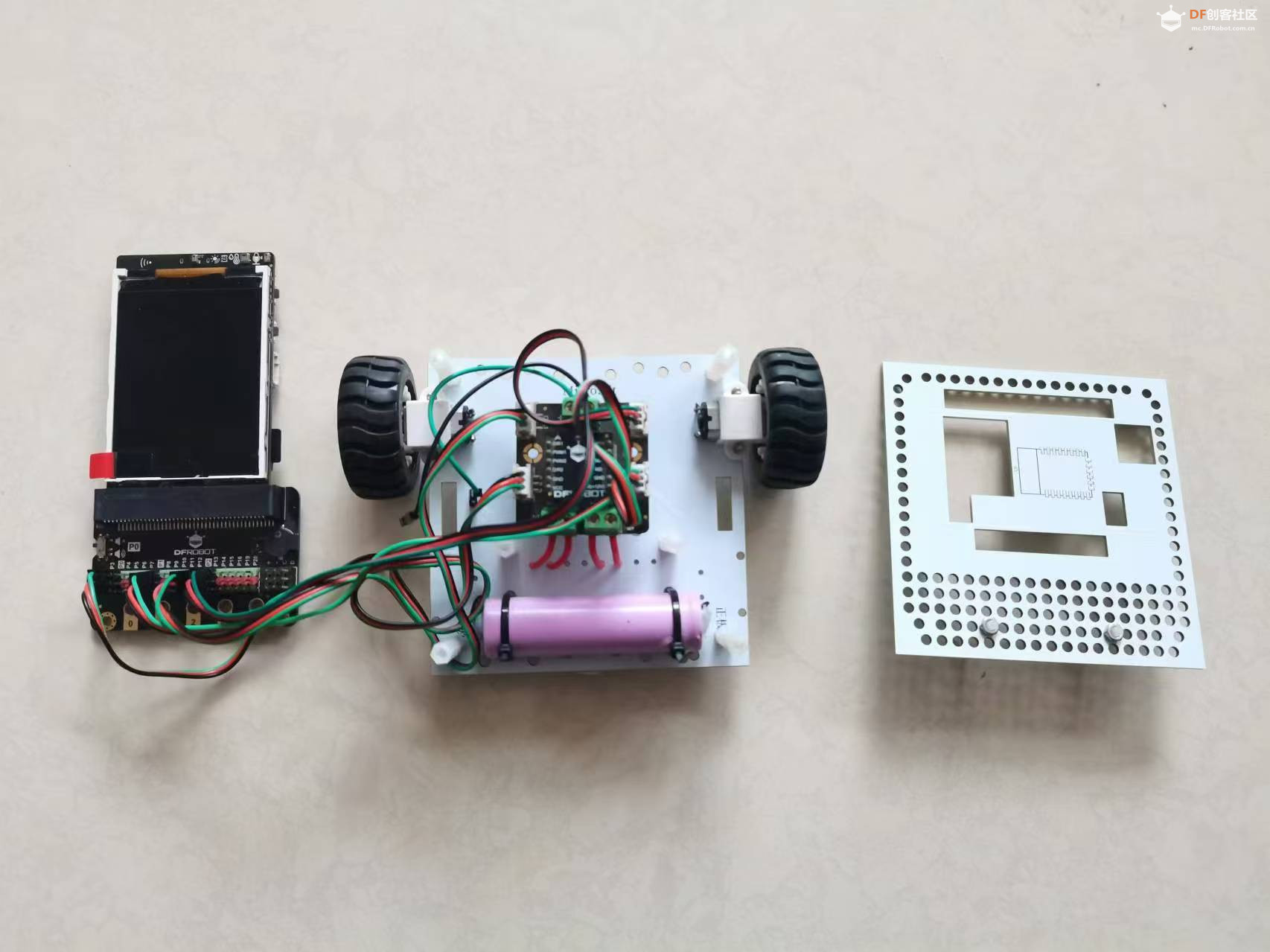
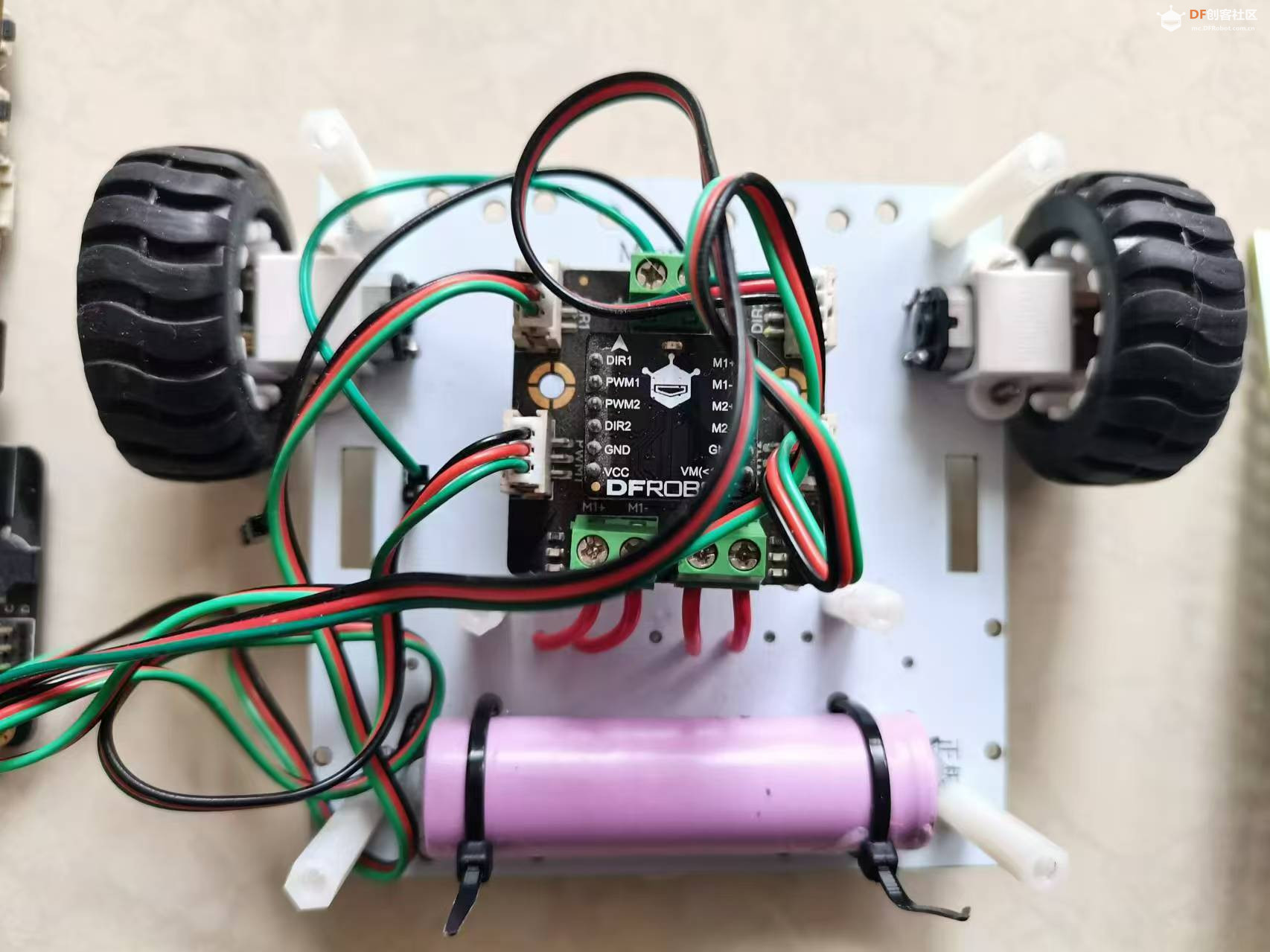
【项目硬件】
- 行空板连接扩展板,引脚与TB6612FNG微型双路直流电机驱动模块连接,引脚P0连接PWM1,P12连接DIR1,P1连接PWM2,P13连接DIR2。
【程序编写】
【程序解析】
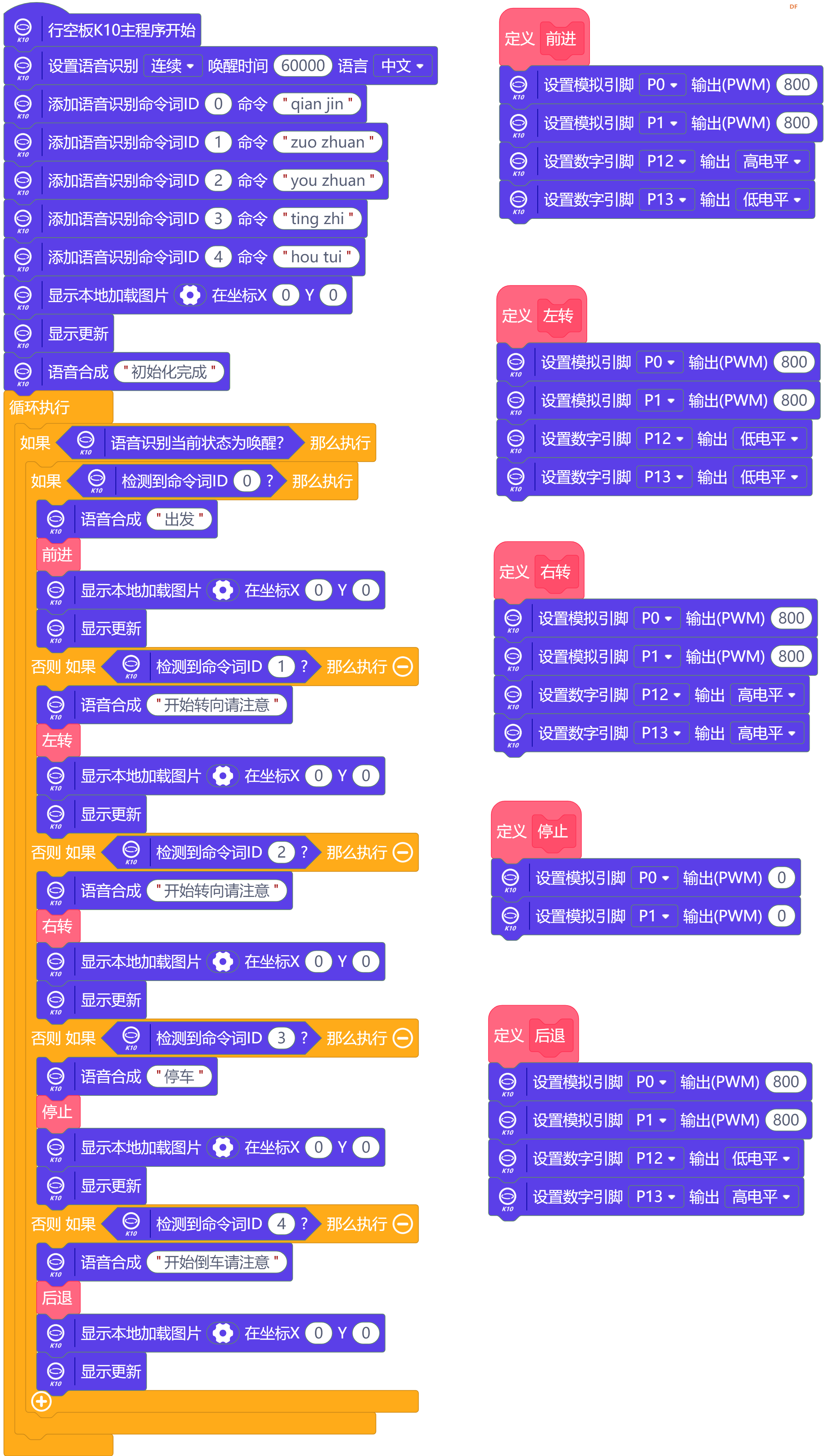
语音识别设置:
- 语音识别被设置为连续模式。
- 使用中文语言进行语音识别。
- 唤醒时间被设置为60000毫秒(60秒)。
语音识别命令词:
- 添加了多个命令词ID,分别对应小车的前进、左转、右转、停止和后退操作。
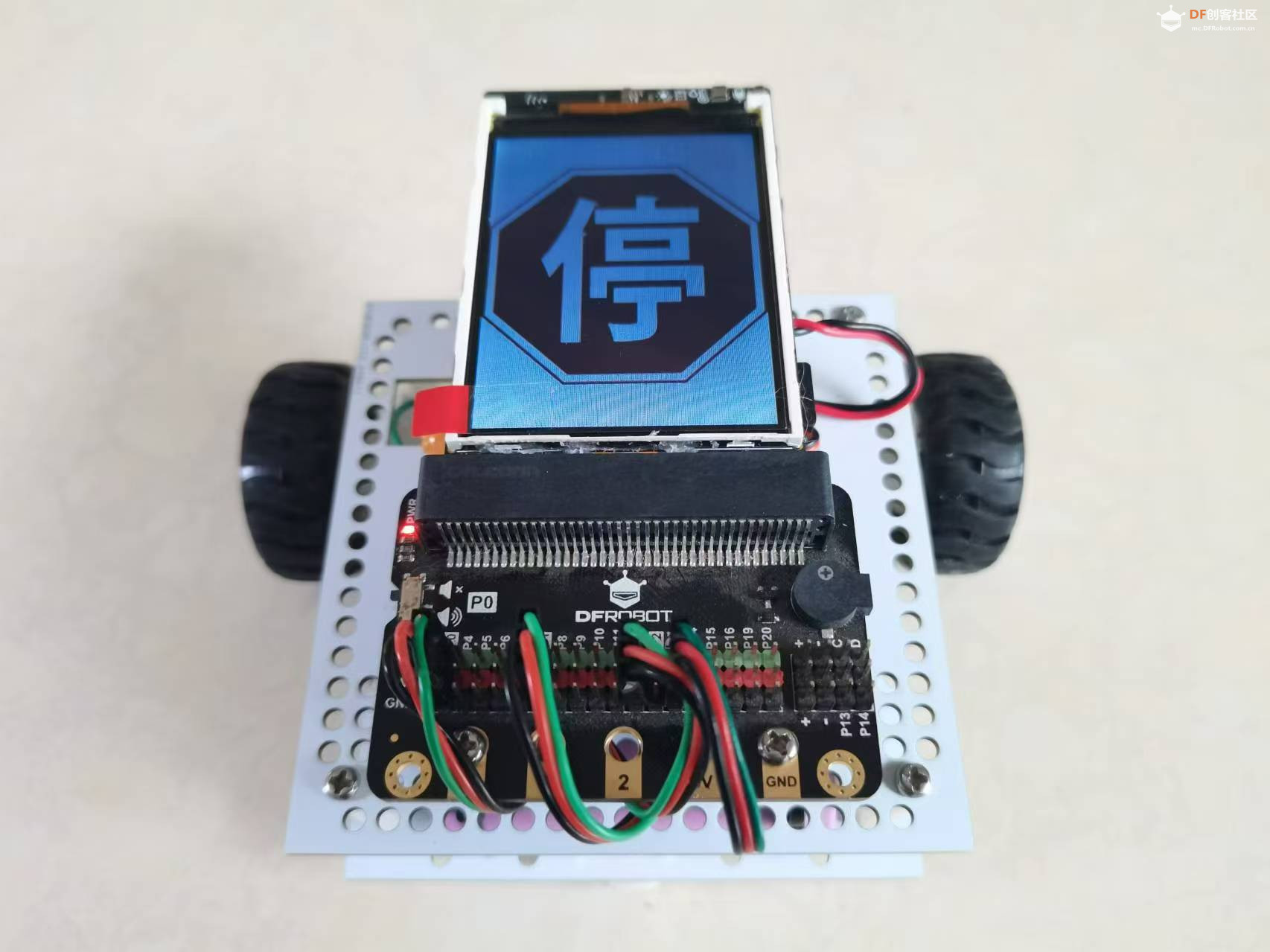
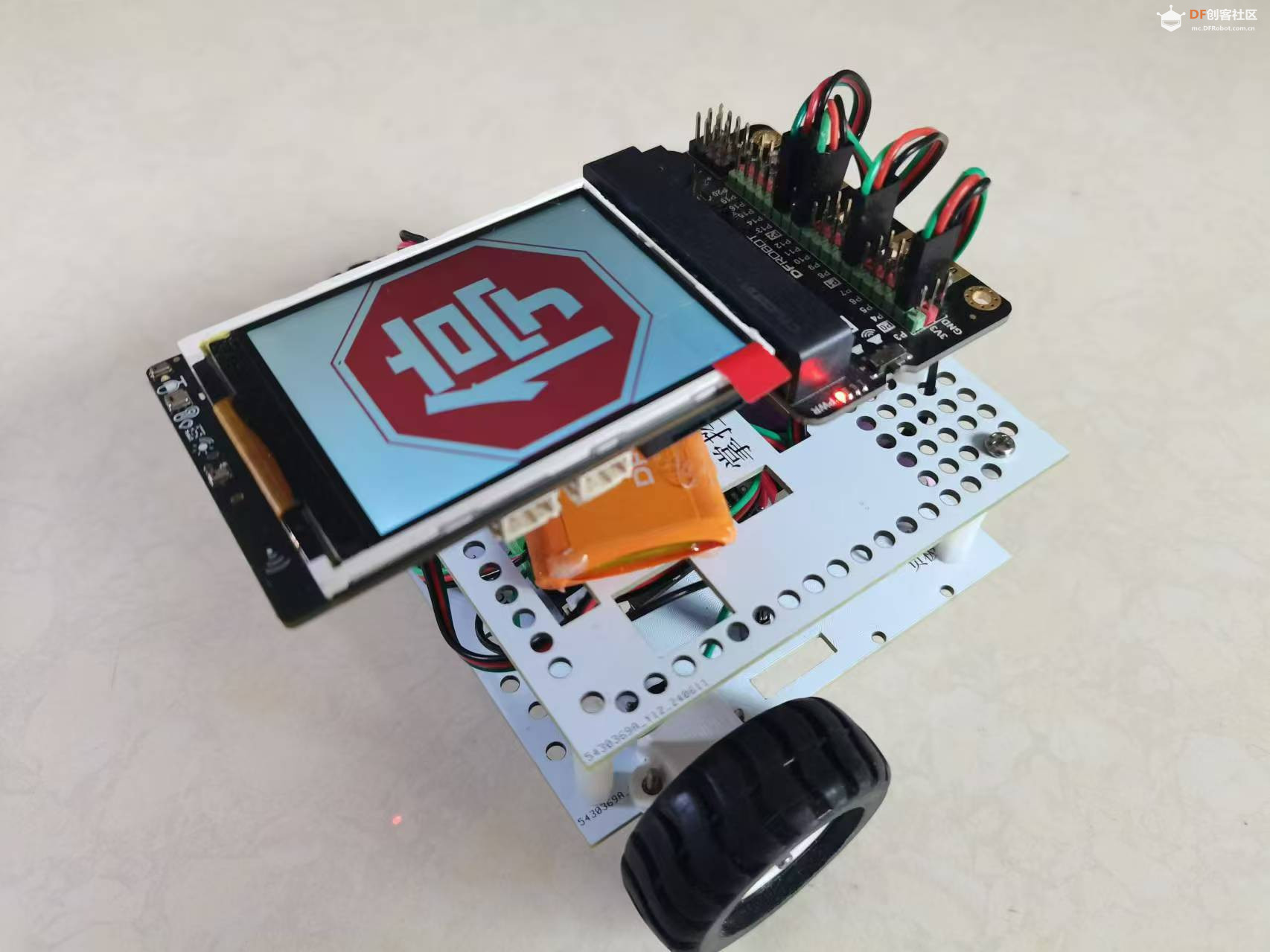
显示和语音合成:
- 程序中包含了显示本地加载图片和语音合成的指令,用于在执行特定动作时提供视觉和听觉反馈。
控制逻辑:
- 程序通过循环执行,并在检测到特定的命令词ID时执行相应的动作。
- 例如,当检测到“前进”命令时,会触发语音合成说出“前进”,并通过设置引脚的电平来控制电机驱动模块,使小车前进。
电机控制:
- 使用TB6612FNG微型双路直流电机驱动模块,通过设置不同的PWM值和方向引脚来控制小车的前进、左转、右转、停止和后退。
引脚连接:
- P0引脚连接到PWM1,用于控制电机的速度。
- P12引脚连接到DIR1,用于控制电机的转向。
- P1和P13引脚分别连接到PWM2和DIR2,用于控制第二个电机的速度和转向。
【演示视频】
随着项目的完成,我们不仅见证了一个智能小车的诞生,更是体验了人工智能技术与创客精神的完美融合。通过行空板K10和Mind+编程软件,我们成功地将语音识别技术应用于实际的机器人控制中,使得小车能够理解和响应人类的语音指令。这不仅为STEM教育提供了一个生动的教学案例,也为爱好者们打开了探索人工智能世界的大门。我们期待这个项目能够激发更多人对科技的热情,鼓励他们继续探索、学习和创造,共同推动智能技术的发展和应用。未来,我们相信这样的创新项目将会越来越多地融入我们的日常生活,为我们带来更加便捷和智能的体验。
|
|
|
|
|
|
|
|
|
|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






