【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
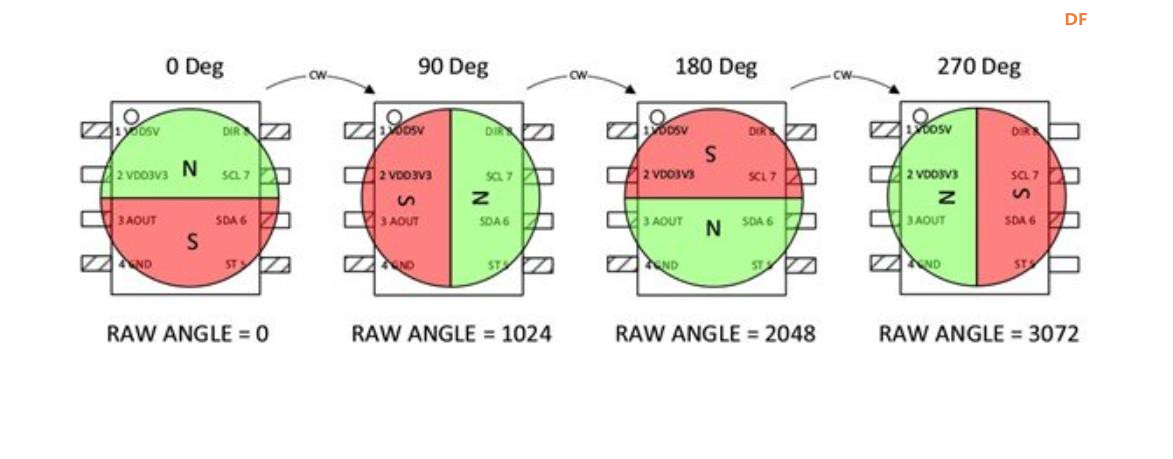
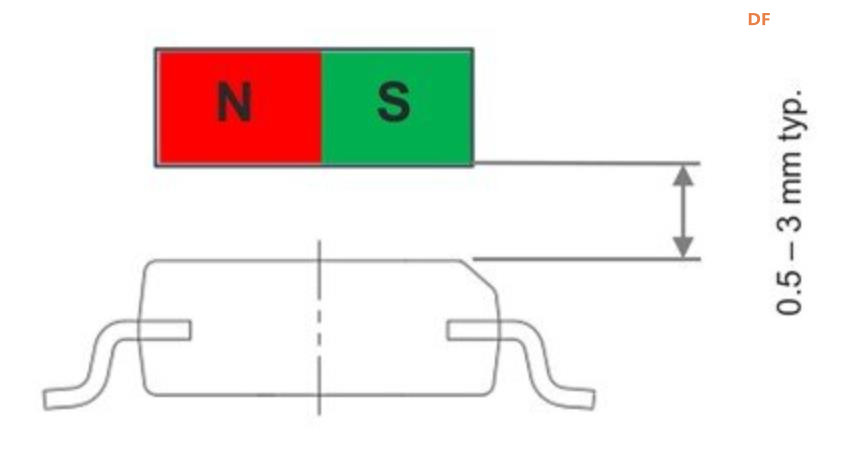
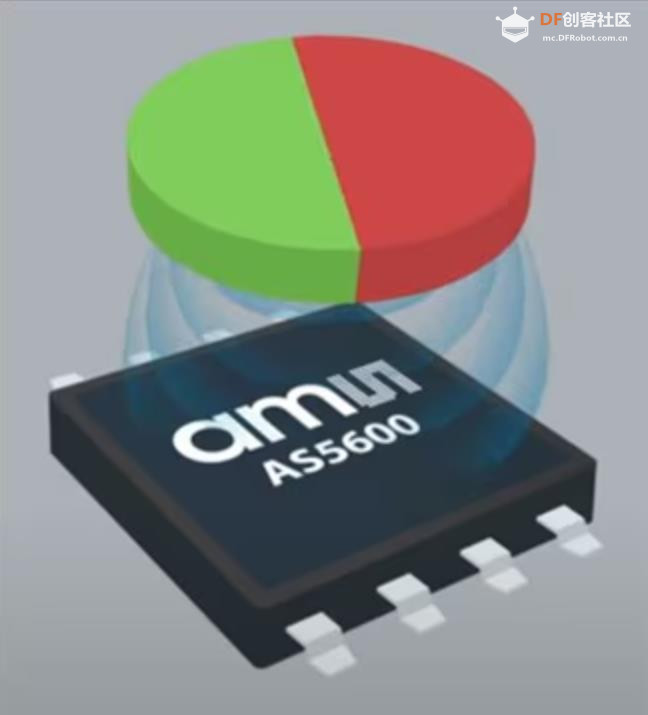
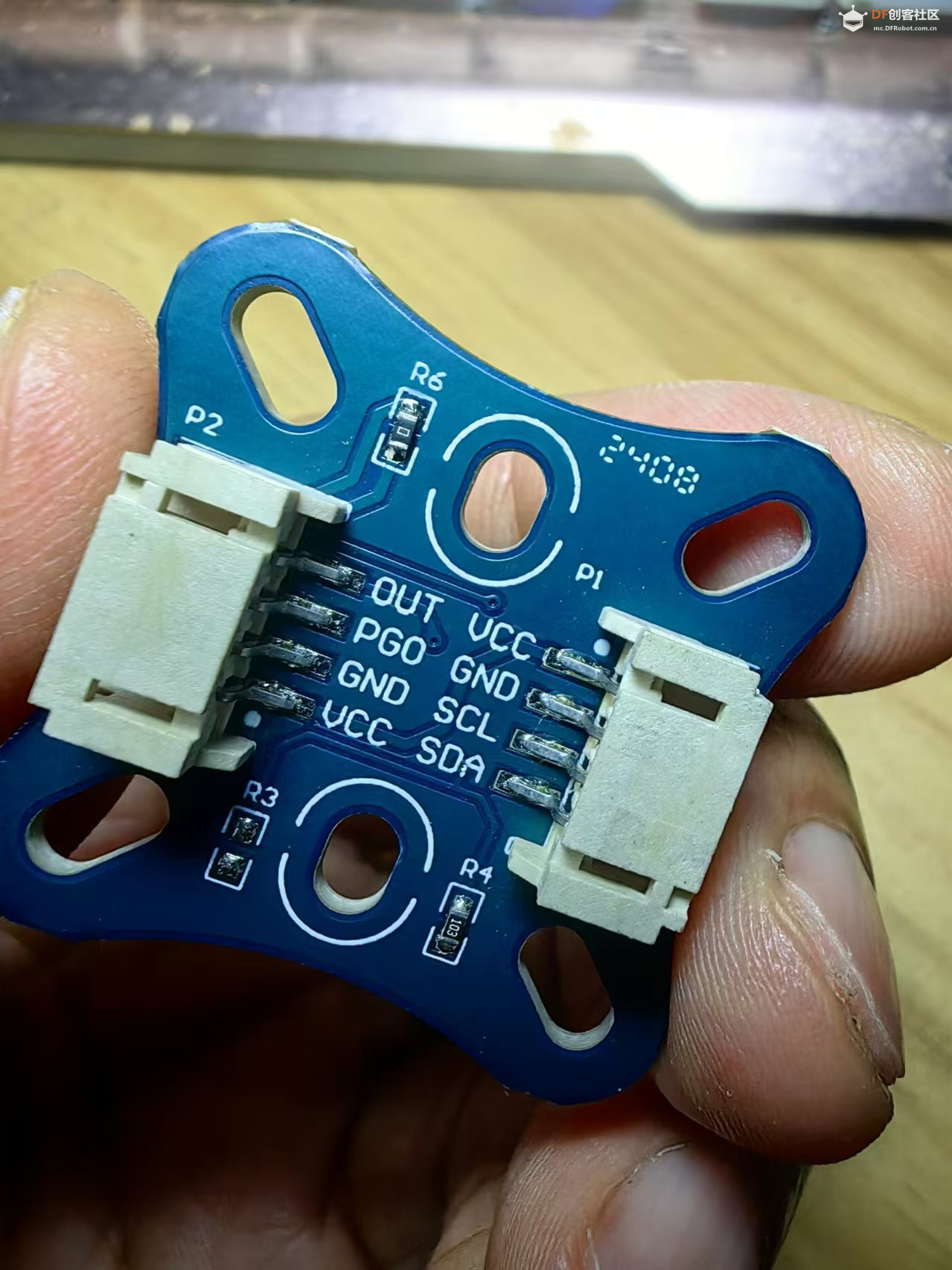
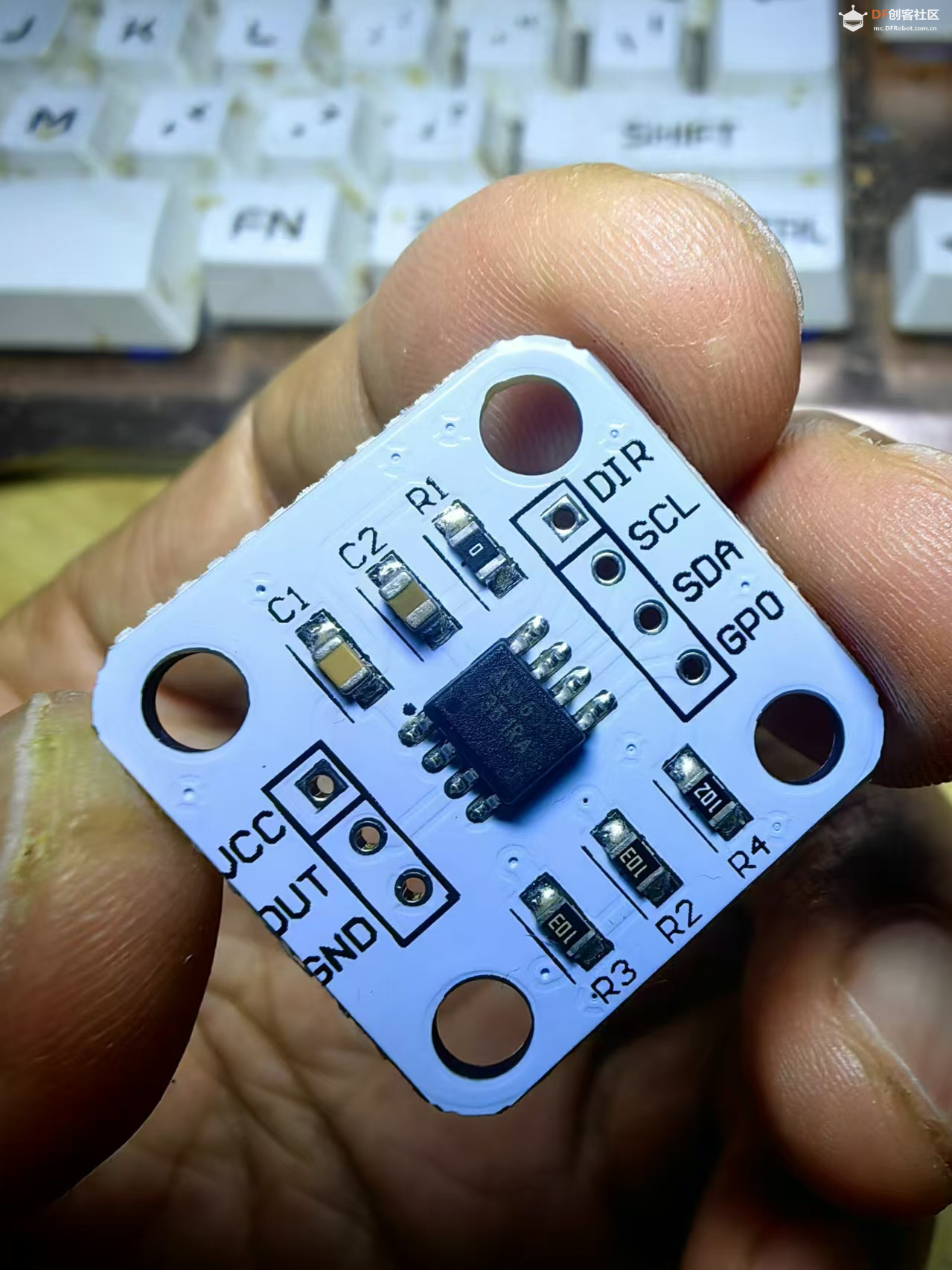
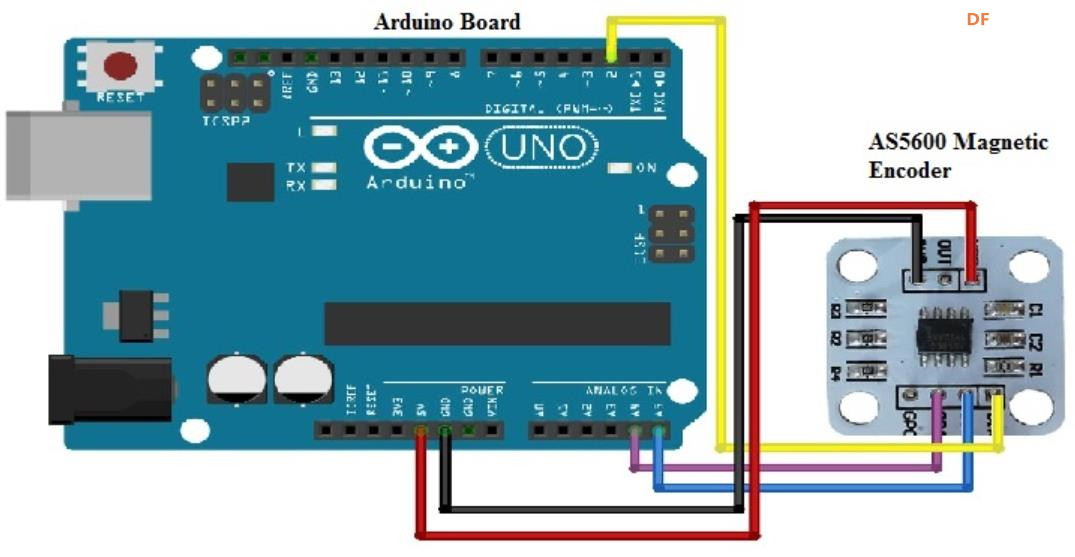
实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块
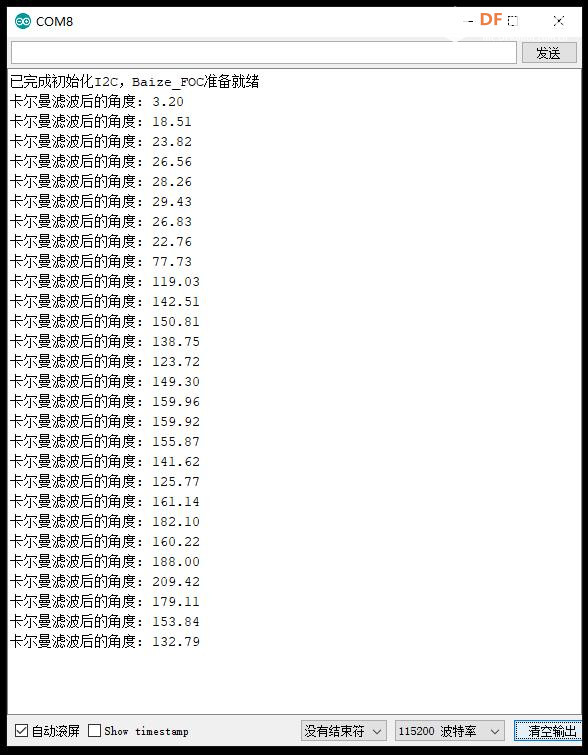
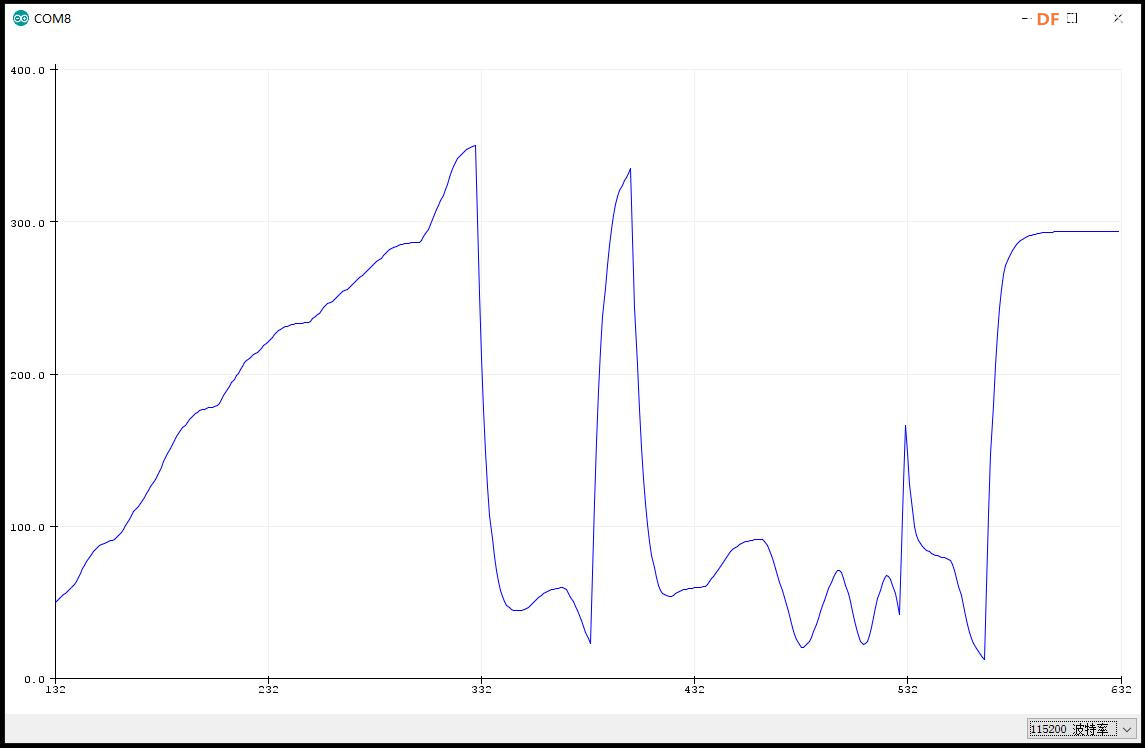
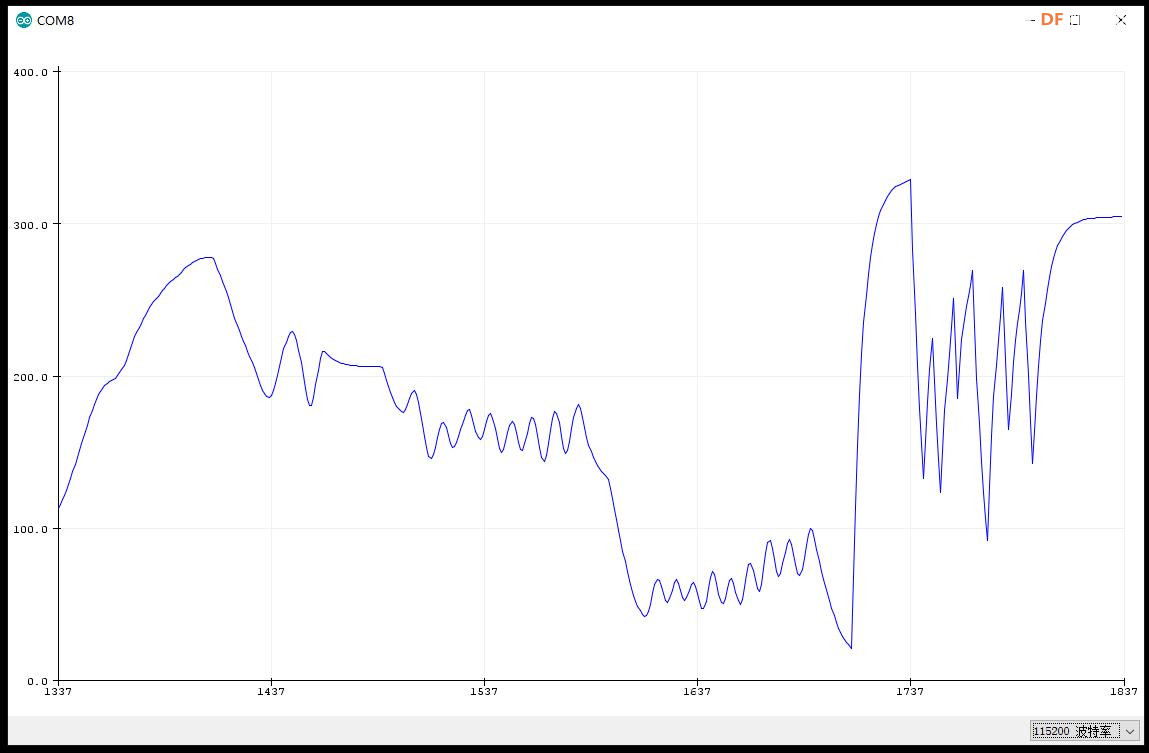
项目实验之十九:使用卡尔曼滤波器处理AS5600编码器数据
实验开源代码
- /*
- 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
- 实验二百二十五:AS5600磁编码器 磁感应角度测量传感器 12bit高精度模块
- 项目实验之十九:使用卡尔曼滤波器处理AS5600编码器数据
- */
-
- #include <Wire.h>
- #include <SimpleFOC.h>
- #include <AS5600.h>
-
- // 使用SimpleFOC库中的低通滤波器
- LowPassFilter as5600_filter(0.01); // 创建一个低通滤波器实例,滤波系数为0.01
- AS5600 encoder; // 创建一个AS5600编码器实例
-
- // 定义卡尔曼滤波相关变量
- float measured_angle = 0; // 测量的角度
- float estimated_angle = 0; // 估计的角度
- float Q_angle = 0.001; // 过程噪声
- float R_measure = 0.03; // 测量噪声
- float P = 1; // 估计误差协方差
- float K; // 卡尔曼增益
-
- void setup() {
- Serial.begin(115200); // 初始化串口通信,波特率为115200
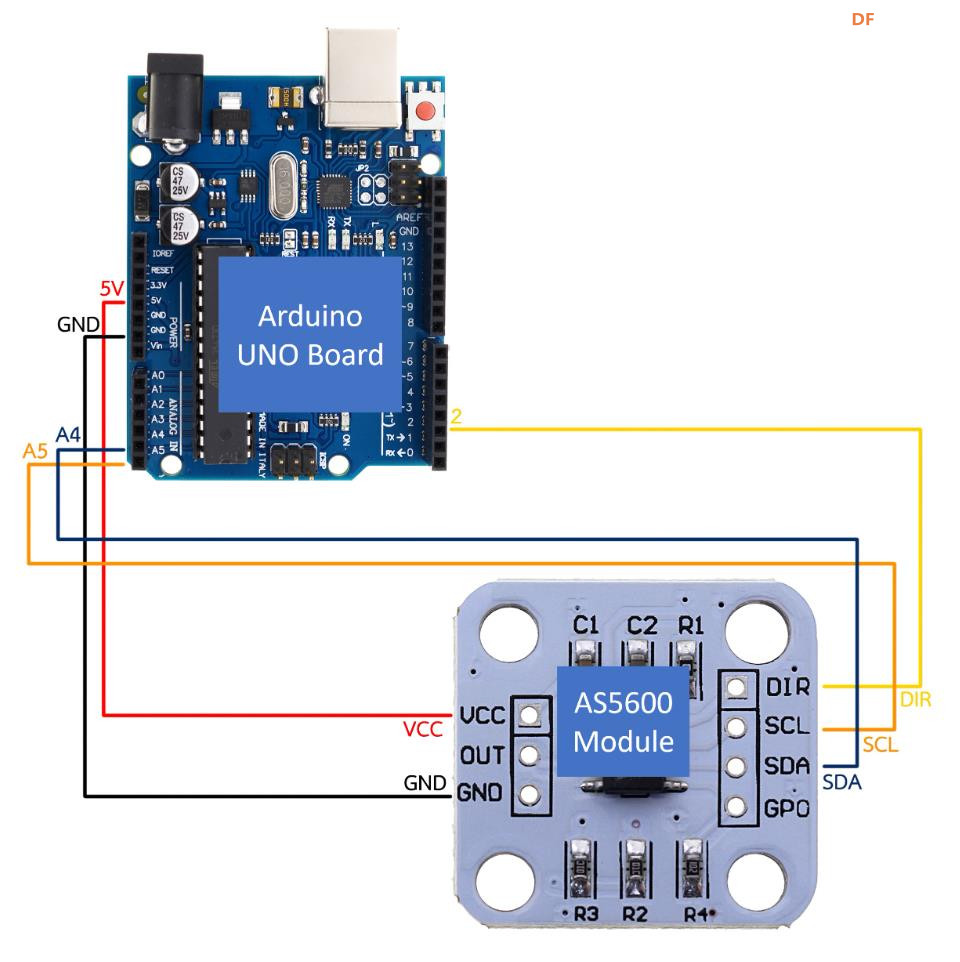
- Wire.begin(); // 初始化I2C通信
- encoder.begin(); // 初始化AS5600编码器
- Serial.println("已完成初始化I2C,Baize_FOC准备就绪"); // 输出初始化完成信息
- }
-
- void loop() {
- uint16_t readValue = 0; // 存储读取的原始数据
- byte readArray[2]; // 存储读取的字节数据
-
- // 通知设备即将读取数据
- Wire.beginTransmission(0x36); // 开始与I2C地址为0x36的设备通信
- Wire.write(0x0C); // 写入寄存器地址0x0C,准备读取角度数据
- Wire.endTransmission(false); // 结束传输,但保持I2C总线激活状态
-
- // 读取数据的MSB和LSB
- Wire.requestFrom(0x36, (uint8_t)2); // 请求从设备读取2个字节的数据
- if (Wire.available() == 2) { // 检查是否有2个字节可用
- readArray[0] = Wire.read(); // 读取第一个字节(MSB)
- readArray[1] = Wire.read(); // 读取第二个字节(LSB)
- readValue = (readArray[0] << 8) | readArray[1]; // 将两个字节合并为一个16位的值
- float raw_angle = (float)readValue / 4096.0 * 360.0; // 将原始数据转换为0-360度
- float filteredValue = as5600_filter(raw_angle); // 对角度数据进行低通滤波
-
- // 卡尔曼滤波
- measured_angle = filteredValue; // 更新测量的角度
-
- // 预测步骤
- P = P + Q_angle; // 更新估计误差协方差
-
- // 更新步骤
- K = P / (P + R_measure); // 计算卡尔曼增益
- estimated_angle = estimated_angle + K * (measured_angle - estimated_angle); // 更新估计的角度
- P = (1 - K) * P; // 更新估计误差协方差
-
- // 确保角度在0-360度范围内
- if (estimated_angle < 0) {
- estimated_angle += 360;
- } else if (estimated_angle >= 360) {
- estimated_angle -= 360;
- }
-
- // 输出滤波后的角度
- Serial.print("卡尔曼滤波后的角度: ");
- Serial.println(estimated_angle);
- } else {
- Serial.println("Error reading data"); // 如果读取数据失败,输出错误信息
- }
- delay(50); // 延迟50毫秒
- }
| 



 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶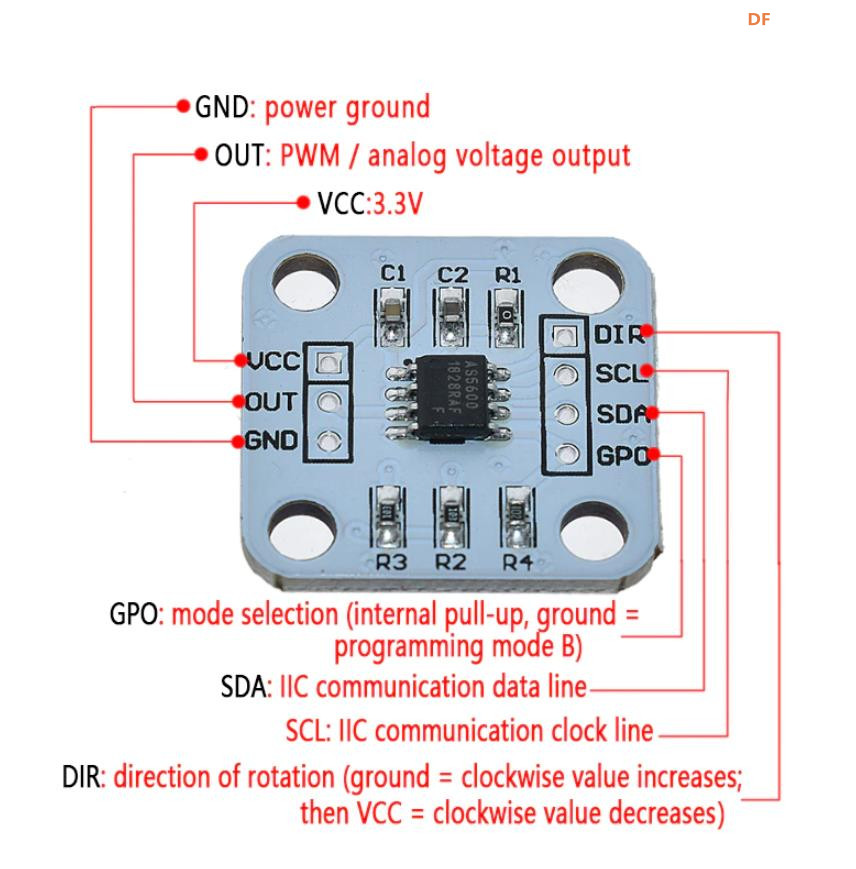

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






