|
1645| 5
|
[项目] 【花雕学编程】Arduino动手做(233)---校准ADXL俯仰滚动角 |
|
ADXL345是一款由Analog Devices公司推出的三轴数字加速度计,具有高分辨率和低功耗的特点,非常适合移动设备和其他需要精确加速度测量的应用。以下是对ADXL345三轴模块的详细介绍: 1、主要特点 高分辨率:ADXL345能够提供高达13位的分辨率,能够测量高达±16g的加速度1。 低功耗:在测量模式下,功耗低至23 μA,在待机模式下功耗仅为0.1 μA1。 多种测量范围:用户可以选择±2g、±4g、±8g或±16g的测量范围,适应不同的应用需求1。 数字接口:支持SPI(3线或4线)和I2C数字接口,方便与各种微控制器进行通信1。 内置功能:具有活动/非活动检测、单击/双击检测、自由落体检测等多种功能,可以独立映射到两个中断输出引脚1。 2、应用场景 移动设备:用于检测设备的倾斜、运动和冲击。 医疗仪器:用于监测患者的运动状态。 游戏和定点设备:用于检测用户的动作和姿态。 工业仪器仪表:用于监测机器的振动和运动状态。 个人导航设备:用于检测设备的方向和运动。 3、引脚功能 ADXL345模块通常有以下引脚: VCC:电源引脚,连接到2.0V至3.6V的电源。 GND:地引脚。 SDA/SDI/SDIO:数据输入/输出引脚,用于I2C或SPI通信。 SCL/SCLK:时钟引脚,用于I2C或SPI通信。 CS:片选引脚,用于SPI通信。 INT1/INT2:中断引脚,用于输出检测到的事件。 4、使用步骤 连接电源和地:将VCC引脚连接到电源,GND引脚连接到地。 选择通信接口:根据需要选择I2C或SPI接口,并连接相应的引脚。 初始化传感器:在代码中初始化ADXL345传感器,设置测量范围和其他参数。 读取数据:通过I2C或SPI接口读取加速度数据,并进行处理。 ADXL345是一款功能强大且易于使用的三轴加速度计,适用于各种需要精确加速度测量的应用。 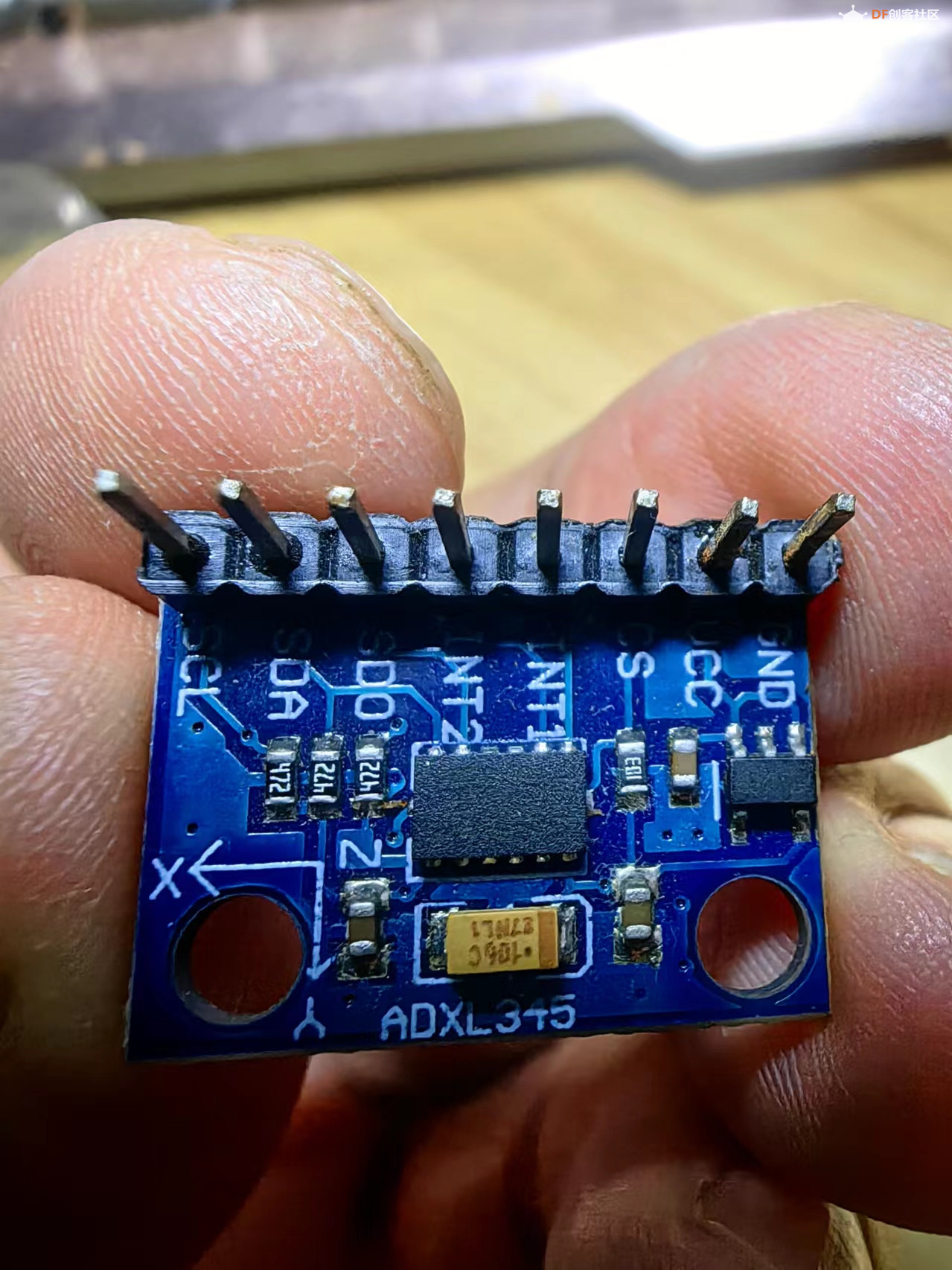 |
|
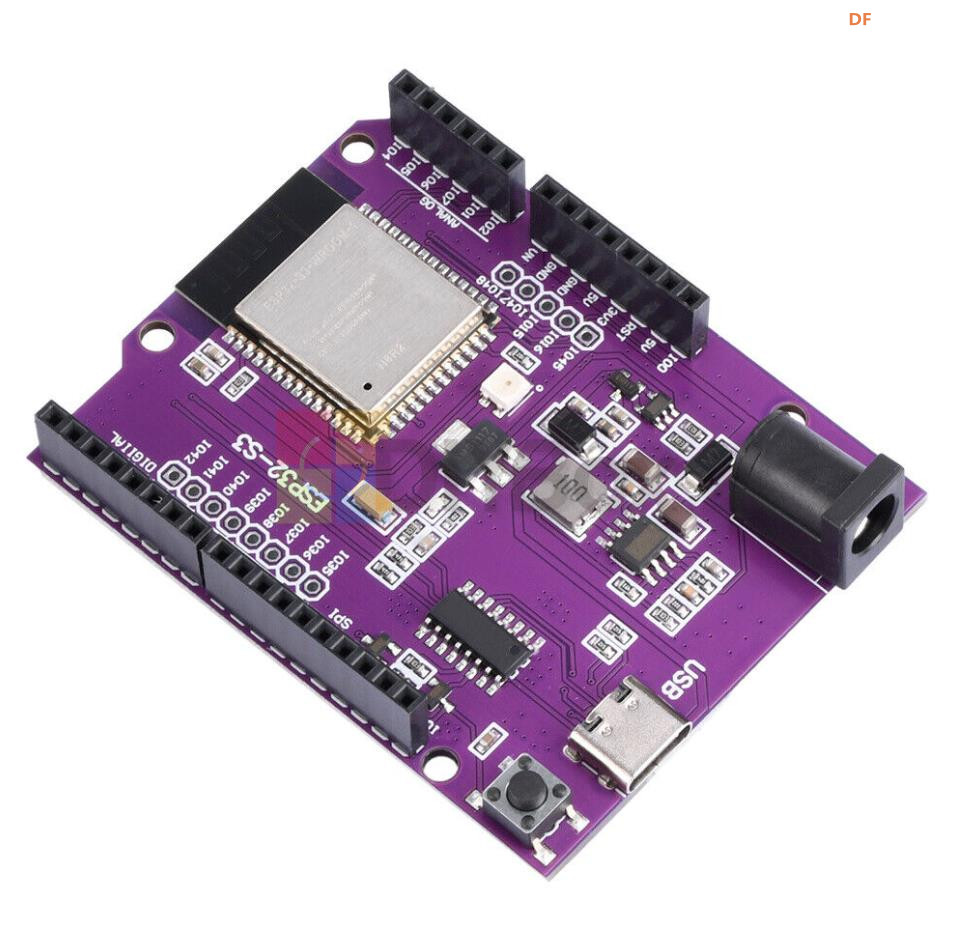
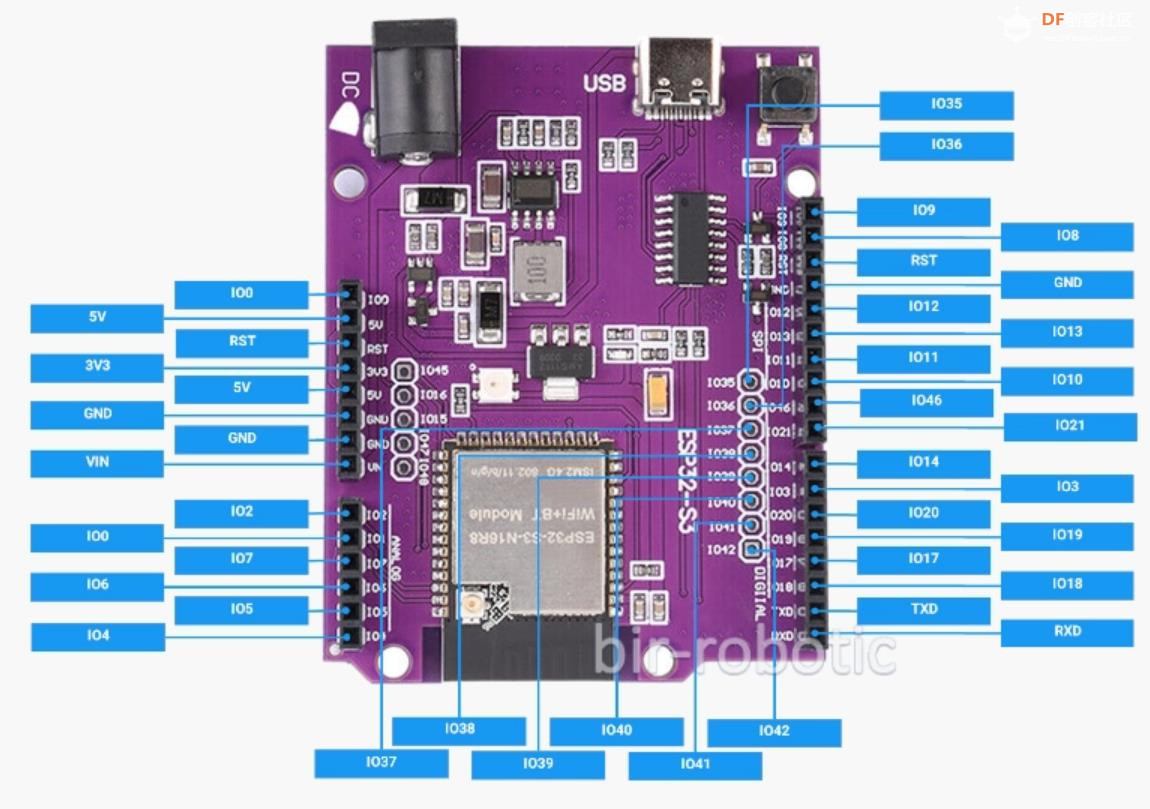
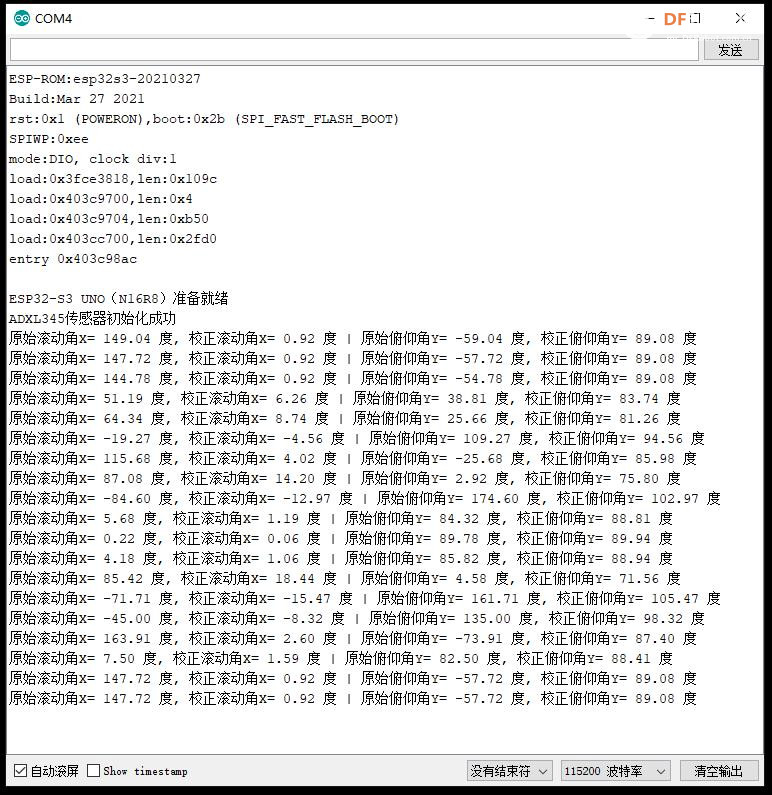
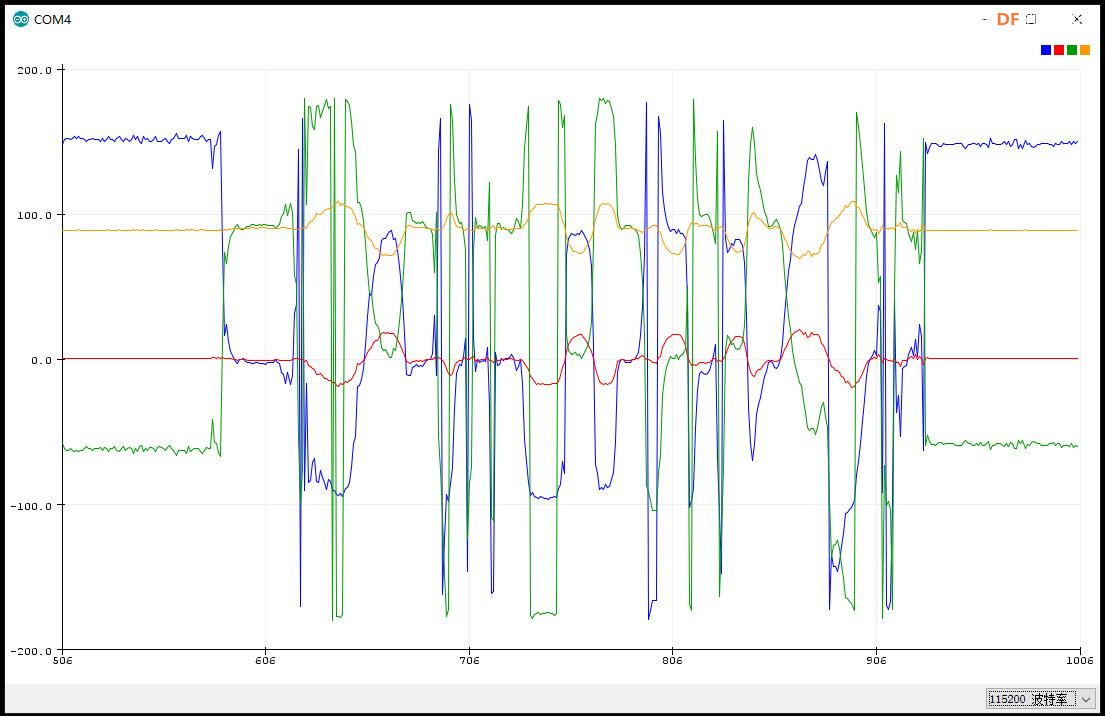
校准ADXL345传感器的俯仰角和滚动角可以显著提高测量精度。以下是校准过程: 1、初始化传感器:确保传感器正确连接并初始化。 2、读取原始数据:在不同的静止位置读取传感器的X、Y、Z轴加速度数据。 3、计算偏移量:根据读取的数据计算每个轴的偏移量。 4、设置校准参数:将计算得到的偏移量应用到传感器中。 5、验证校准效果:重新读取数据并计算俯仰角和滚动角,验证校准效果。 【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百三十三:ESP32-S3 UNO开发板 双核16M+8M+Wi-Fi+蓝牙5.0+45个GPIO {花雕动手做}项目之七:ESP32-S3 UNO同时显示ADXL校准前后的俯仰角和滚动角 实验开源代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






