|
3235| 9
|
[K10项目分享] 【花雕学编程】行空板K10系列实验之姿态方向动态陀螺仪 |
 行空板K10是一款专为快速体验物联网和学习人工智能而设计的开发学习板,100%采用国产芯片,知识产权自主可控,符合信息科技课程中编程学习、物联网及人工智能等教学需求。该板集成2.8寸LCD彩屏、WiFi蓝牙、摄像头、麦克风、扬声器、RGB指示灯、多种传感器及丰富的扩展接口。凭借高度集成的板载资源,教学过程中无需额外连接其他设备,便可轻松实现传感器控制、物联网应用以及人脸识别、语音识别、语音合成等AI人工智能项目。 主要特点 集成摄像头&内置算法,可进行离线图像检测 集成麦克风&内置算法,可进行离线语音识别 集成扬声器&内置算法,可进行离线语音合成 2.8寸彩色屏幕,数据展示更清晰 集成度高,利于教学 接口丰富,兼容软件多,扩展性好 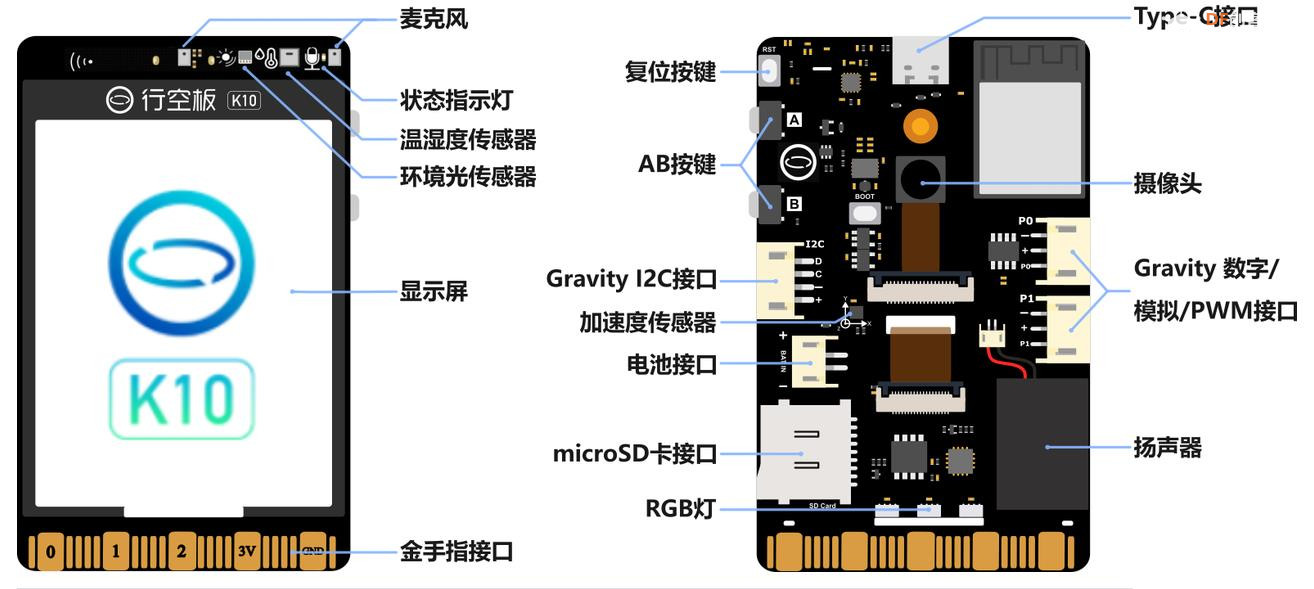 |
|
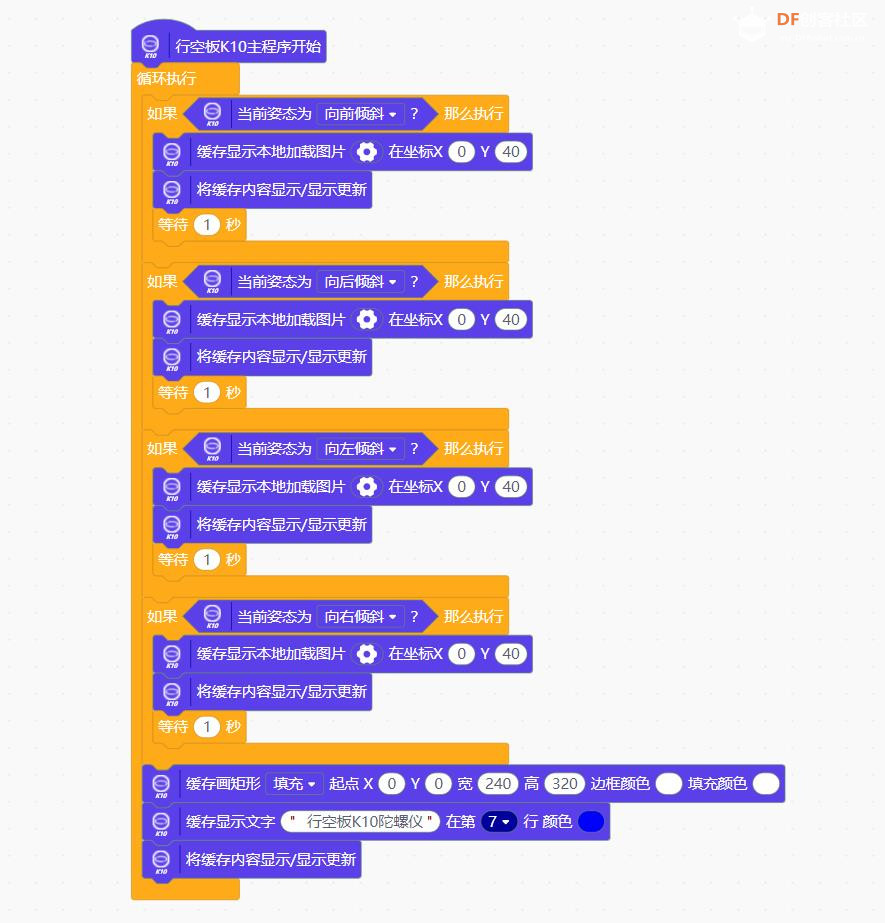
【花雕学编程】行空板K10系列实验之板载姿态方向传感器的动态陀螺仪 实验开源代码 |
|
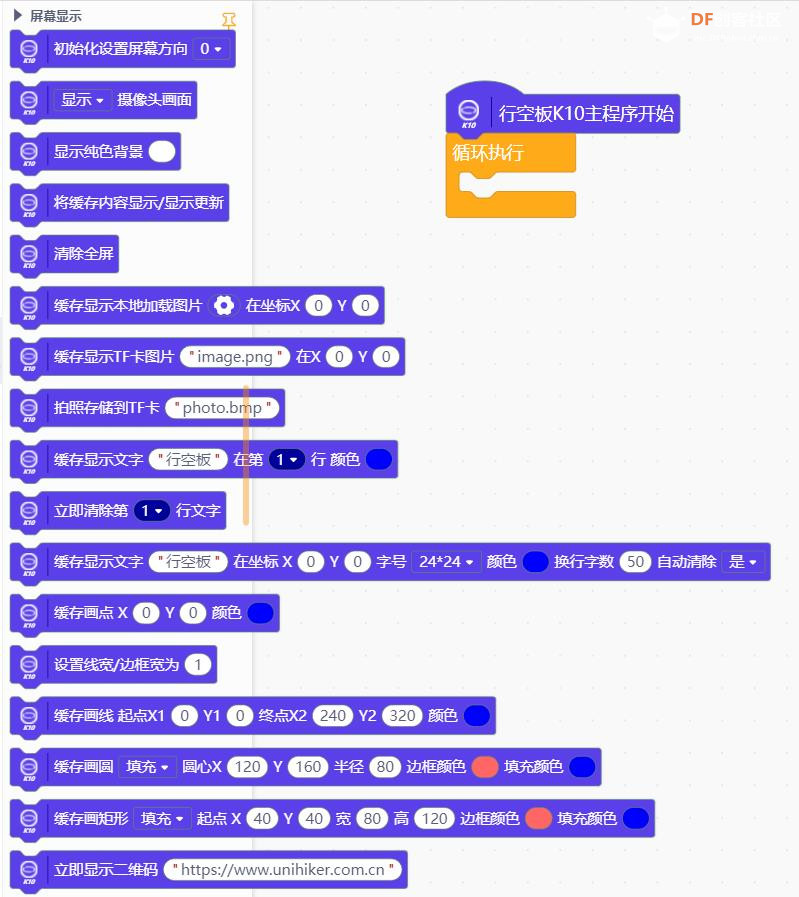
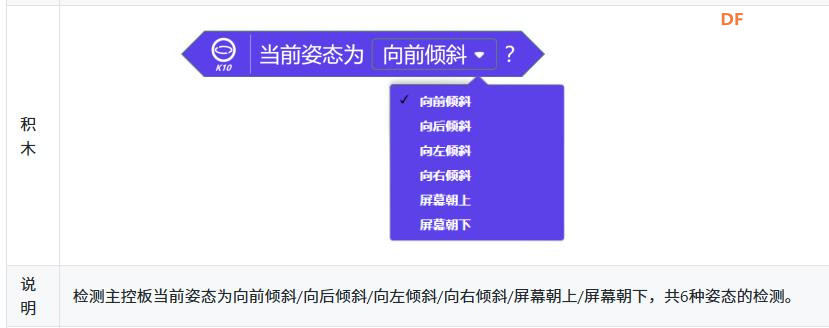
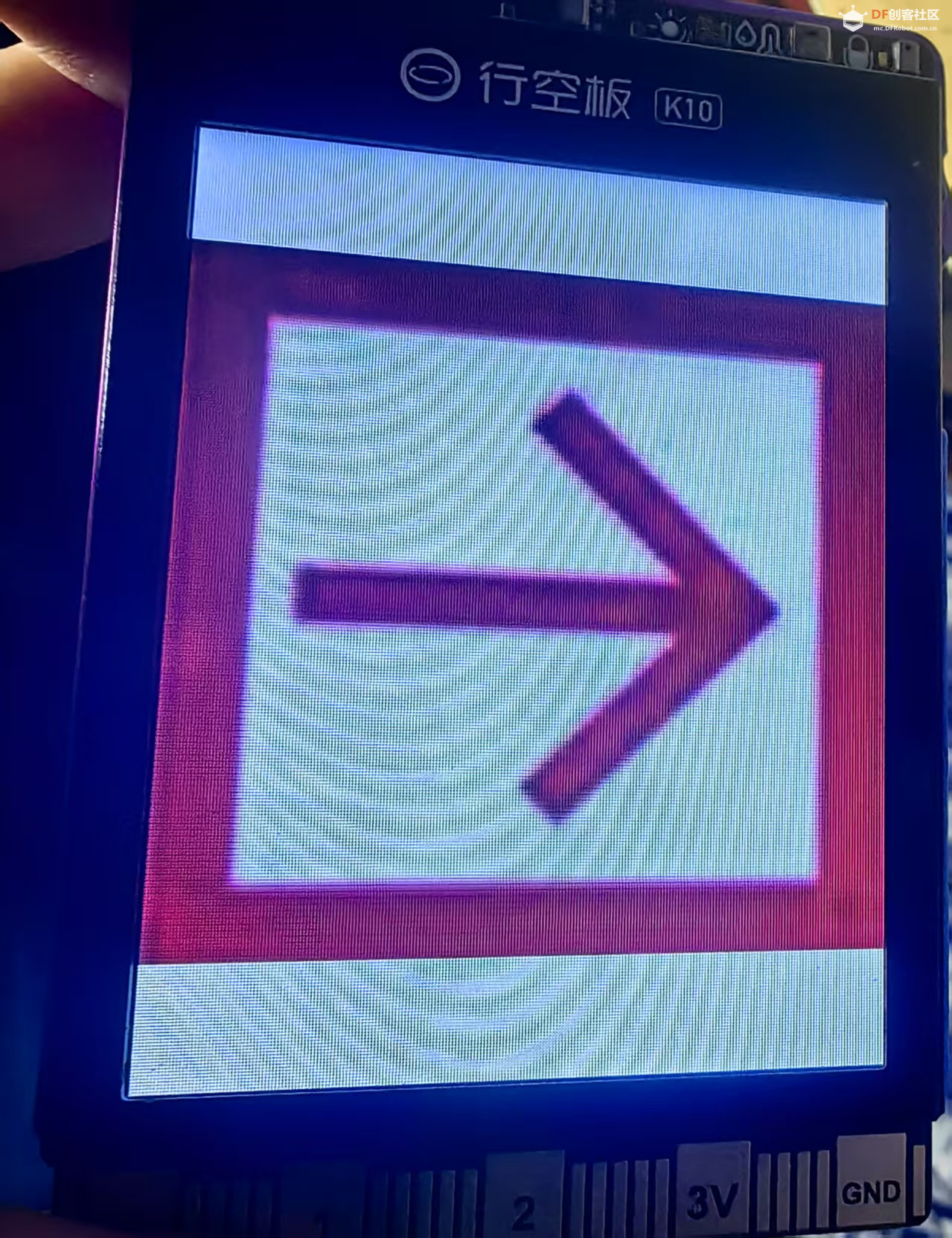
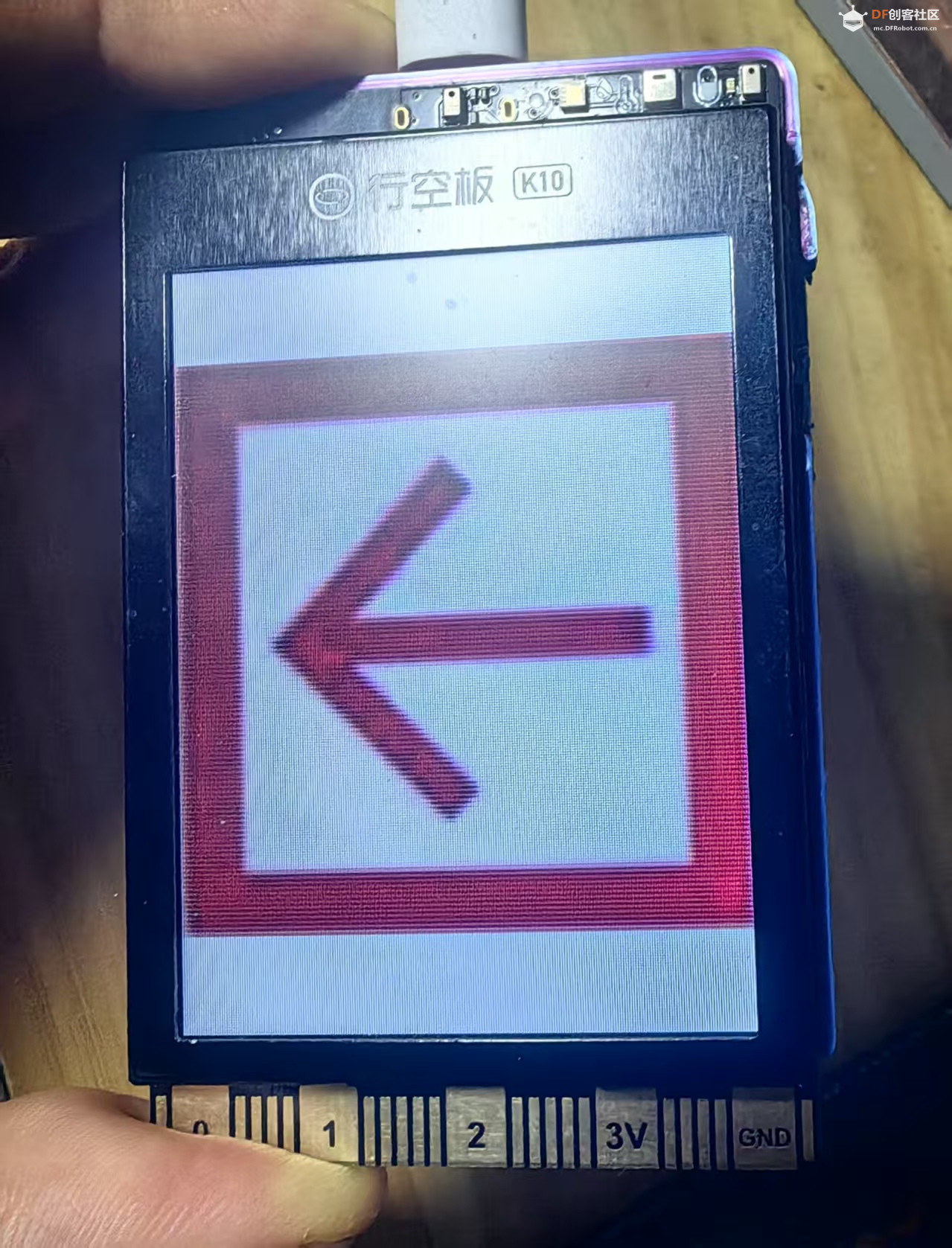
代码解读 1、引入库和创建对象: #include "unihiker_k10.h":引入 UNIHIKER_K10 行空板K10库。 #include "arduino_image_cache.h":引入 arduino_image_cache 库,用于存储和处理图像数据。 UNIHIKER_K10 k10:创建 UNIHIKER_K10 对象行空板k10。 uint8_t screen_dir = 2:定义屏幕方向变量 screen_dir 并初始化为2。 2、初始化设置(setup 函数): 初始化 k10 对象。 根据 screen_dir 初始化屏幕方向。 创建一个画布。 3、主循环(loop 函数): 检测各种手势并在画布上绘制对应的图像: 如果检测到向前倾斜手势,绘制 image_data1 图像,并更新画布。 如果检测到向后倾斜手势,绘制 image_data2 图像,并更新画布。 如果检测到向左倾斜手势,绘制 image_data3 图像,并更新画布。 如果检测到向右倾斜手势,绘制 image_data4 图像,并更新画布。 在每次检测和绘图之后,延迟1秒。 在画布上绘制一个白色矩形,覆盖整个画布。 在画布上显示文本 "行空板K10陀螺仪",字体大小为7,颜色为蓝色 (0x0000FF)。 更新画布以显示最新内容。 这段代码实现了根据板载陀螺仪在画布上绘制不同方向箭头并显示文本的功能。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶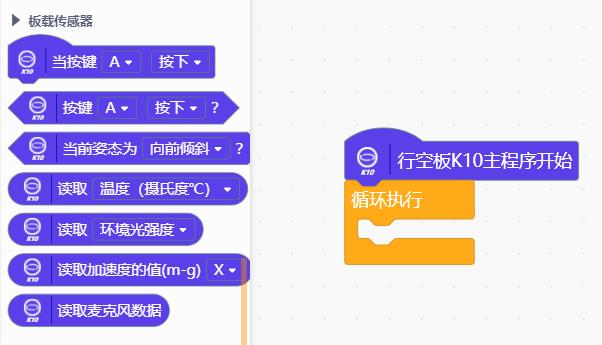





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






