|
1924| 13
|
[项目] 【Arduino 动手做】由ESP32 Cam模块驱动的全方位监控机器人 |
|
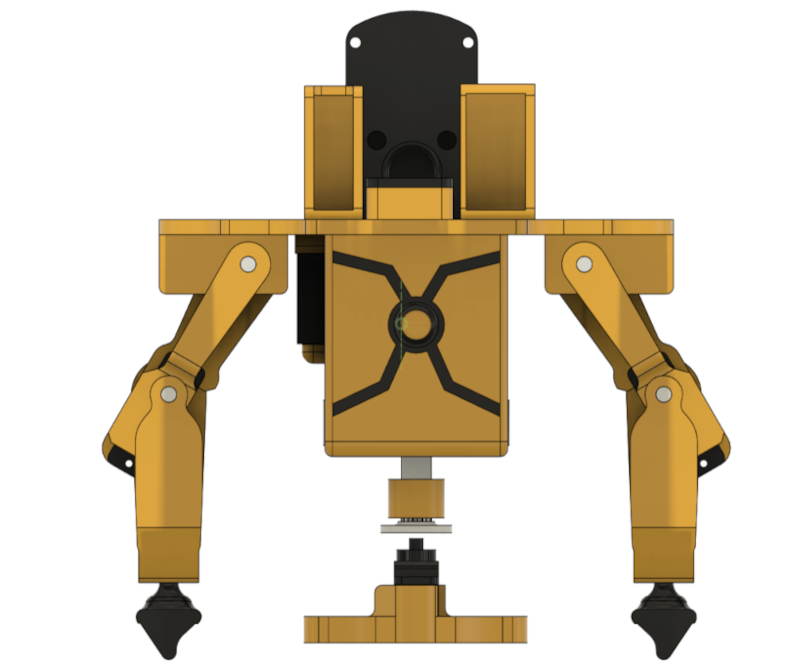
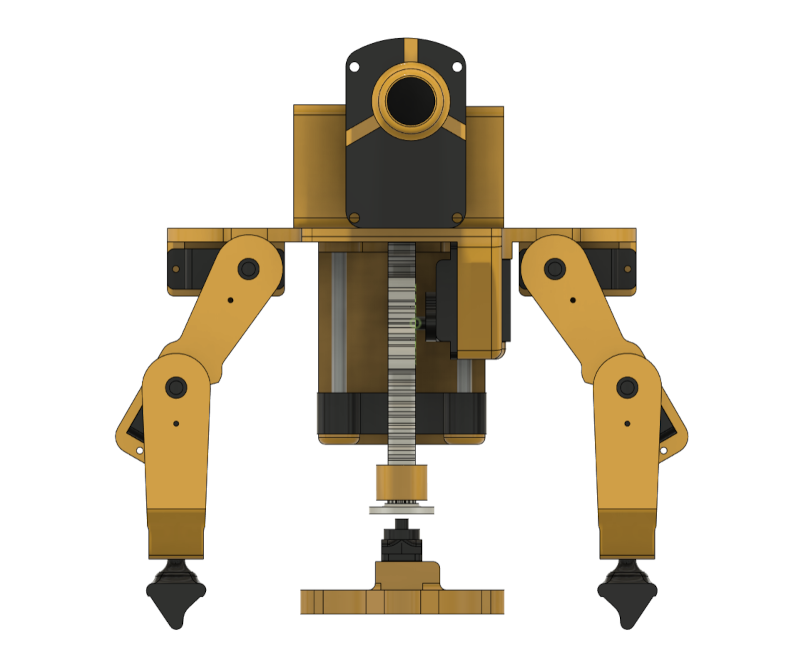
DODGE是一款新颖的三脚架设计,由ESP32 Cam模块驱动。三脚架的第三条腿(支撑腿)位于中间,可在移动过程中为定位支撑腿提供支撑。由于支撑腿底部设有伺服装置,它还可以 360 度旋转。该机器人共有六个伺服装置,考虑到 ESP32 Cam 模块在使用摄像头时可用的 GPIO 引脚有限,因此可以实现多种运动。顾名思义,DODGE 可以横向移动,也可以垂直上下移动。 Dodge 可在室内用于监控房屋周围环境,并可通过连接到其 WIFI 接入点,使用手机或电脑进行控制。连接后,您可以控制它的运动,并查看安装在其头部的摄像头的实时画面。它使用两块电池 - 一块为伺服器供电,另一块为 ESP32 模块供电。两块电池确保机器人稳定运行,因为使用同一块电池为伺服器和 ESP32 模块供电会导致摄像头信号出现一些故障,稍后会详细介绍。 至于未来的计划,我希望将道奇的摄像头拍摄的画面传输到树莓派,用于图像识别、人脸检测等功能,并控制其运动。道奇的3D模型是使用Fusion360设计的,并进行了3D打印。由于道奇体积小,所有部件都可以快速打印,且耗材量不大。  |
|
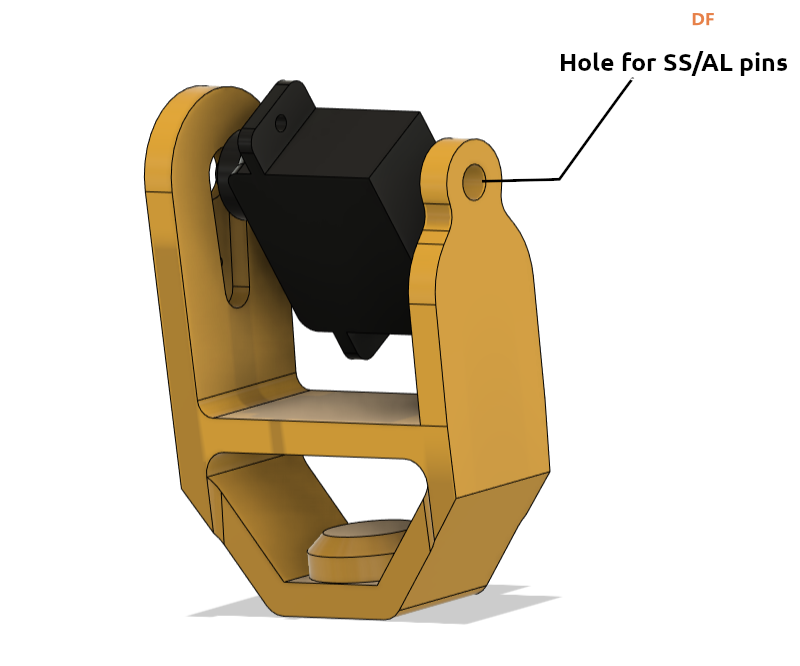
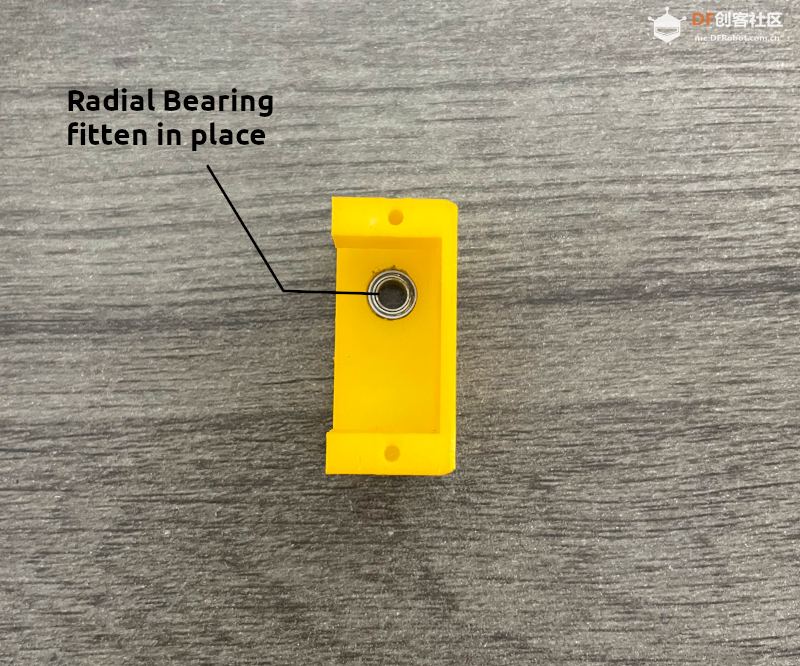
## 补给品 Emax ES08MDII 数字伺服电机 x 6连杆 铝棒(长度-200mm,直径-4mm)x 1节 SS 销或铝销 - 如果您愿意,也可以将铝棒切成 10 毫米长的段(直径 4 毫米 x 长度 10 毫米)x 4链环 ESP32 Cam 模块,带 MB,用于 Type-C USB(CH340)连接 x 1链路 7.4 V 800mAH 15C 锂电池(长 57mm x 宽 30mm x 高 15mm) 5V 800mAh 锂电池(长 50mm x 宽 31mm x 高 11mm) 2.5M 螺纹插件 x 8 2.5M六角螺丝(长度-15mm)x 4 2.5M六角螺丝(长度-25mm)x 4 2.5M六角螺丝(长度-10mm)x 4 3A 可调降压转换器模块 x 1链接 筒式千斤顶 x 1节 母头引脚(8 孔)x 2 LM4UU 直线轴承 (内径-4mm, 外径-8mm , 长度-12mm) x 2链节 小型径向轴承(内径 4 毫米,外径 7 毫米)x 4链节 电解电容(10V,1000uF)x 1 电解电容(10V,470uF)x 1 通用穿孔板 (50mm x 50mm) x 1 2mm普通螺丝 x 4 28 AWG 延长线(黑色、红色、黄色)x 1 螺旋绕线(直径 4 毫米)x 1节 滑动开关 x 1链接 强力胶 x 1 旧鼠标垫或热缩材料,用于在脚和地面之间产生摩擦 手锯或 Dremel x 1 3D打印机 x 1 3D打印耗材 x 1  |
|
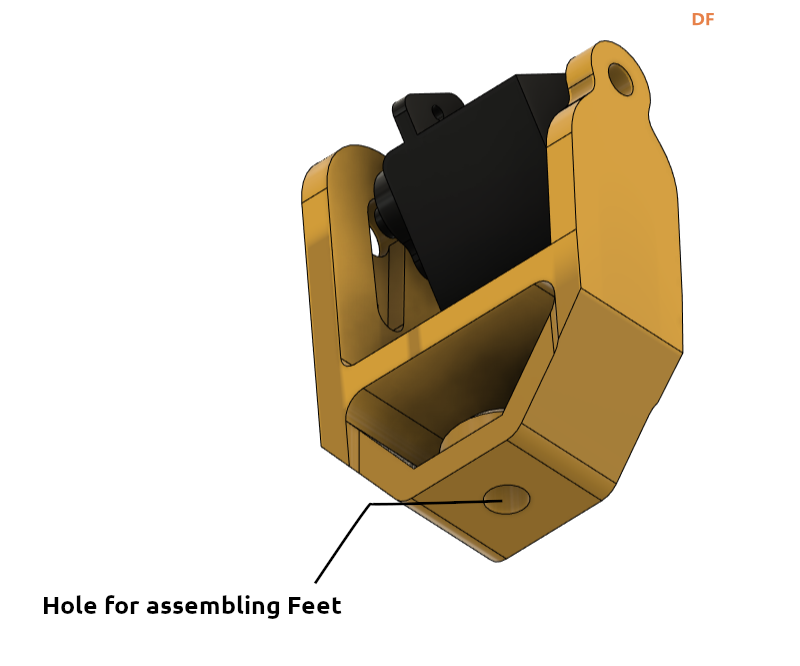
## 步骤4:脚 支脚设计有切口,可容纳 20 毫米长的铝棒,以增加强度。200 毫米长、4 毫米直径的铝棒可以切成两段 20 毫米的段,剩余部分稍后将用于齿条和小齿轮组件,因此请确保暂时将其放在一边。将铝棒安装到支脚后,可以将其推入小腿底部的孔中,并使用一些强力胶将其固定到位。可以使用热缩管粘在支脚底部以在移动时产生牵引力。我使用了一个旧鼠标垫,将其切成支脚底部的形状并将其粘在适当的位置。这产生了必要的摩擦力,但您可以使用任何可用的东西。 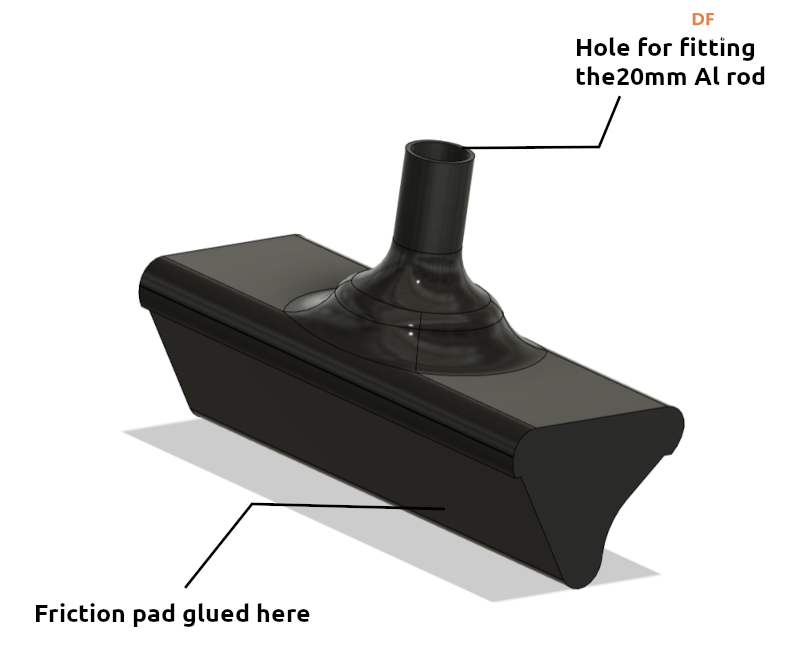  |
|
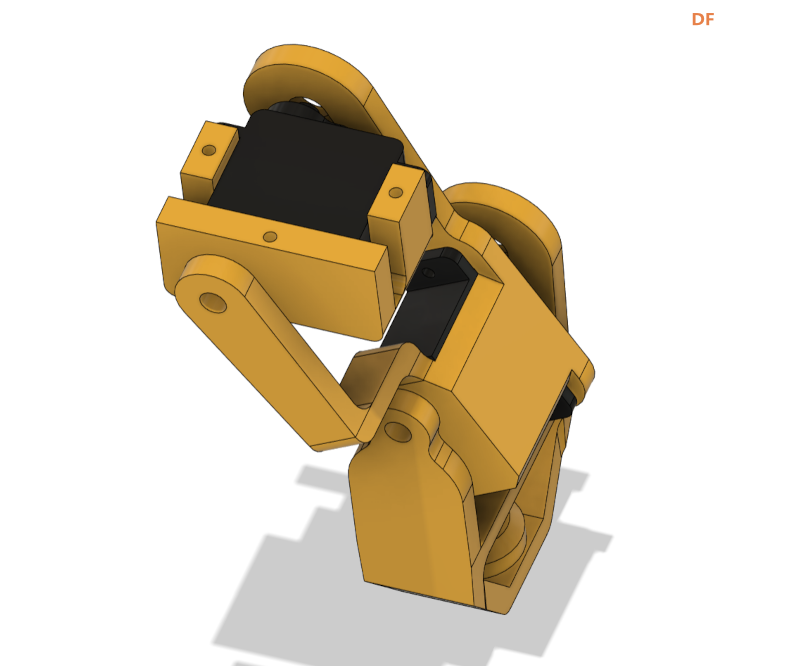
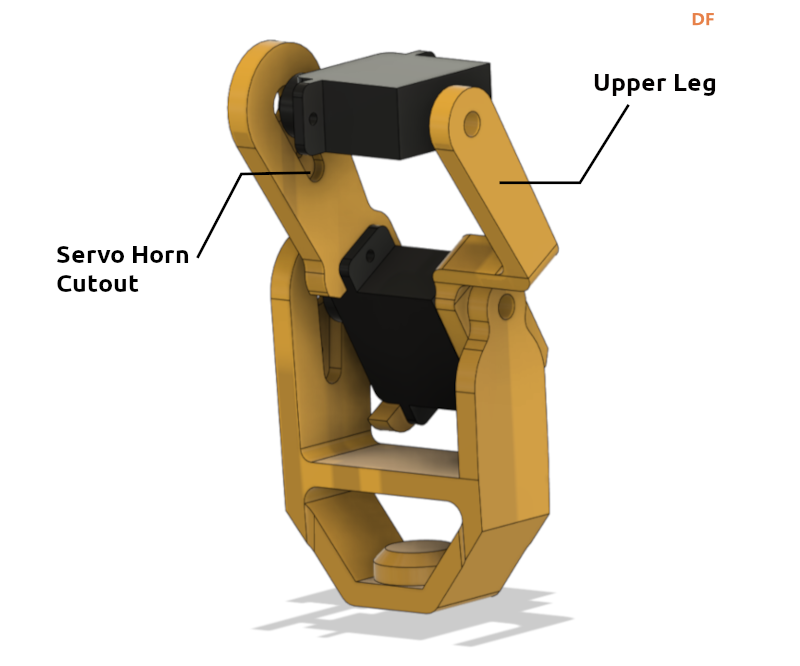
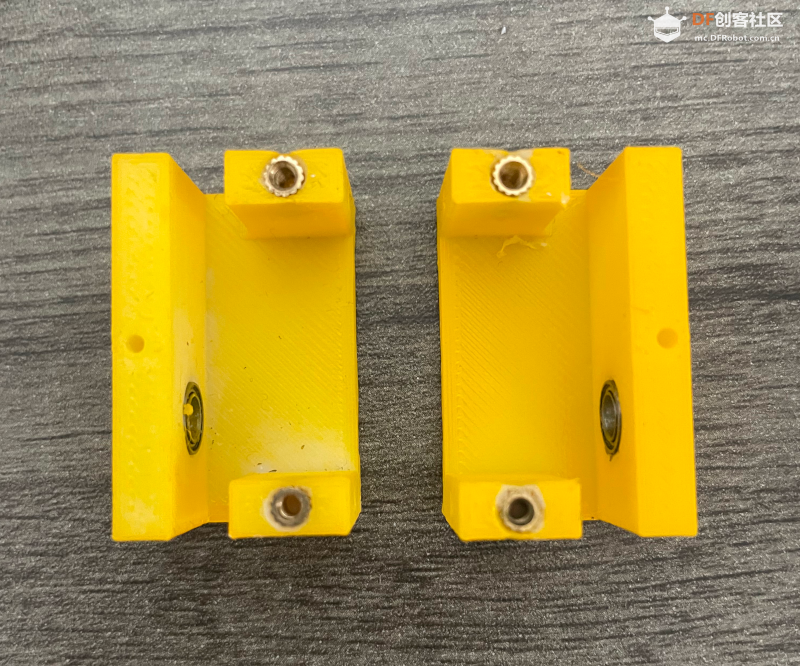
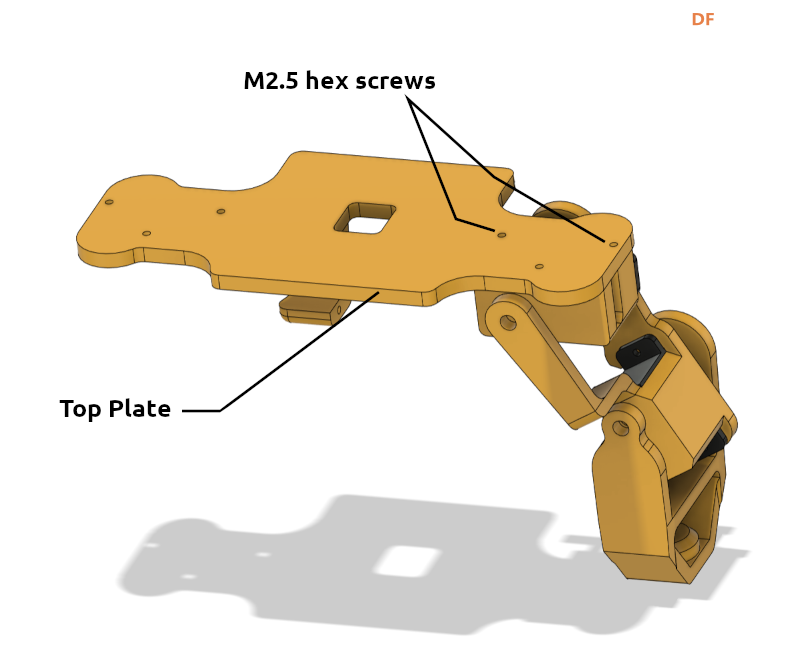
## 步骤 6:支撑腿 支撑腿由齿条和小齿轮组件组成,小齿轮由伺服器驱动。另一个伺服器安装在支撑脚上,使 Dodge 能够旋转 360 度。由于伺服器的旋转范围为 0 到 180 度,Dodge 可以抬起支撑脚,使其旋转 180 度,然后将其脚放低至地面,使其能够旋转另一半。考虑到单个 180 度伺服器的局限性,这是一种实现 360 度旋转的巧妙方法。 用强力胶将机架的一端固定在套环的插槽上。套环的下端有一个齿轮轮廓切口,用于插入耦合齿轮,耦合齿轮随后用螺丝固定在舵机附带的圆形舵机支架上。然后将舵机放入支撑脚中,并用螺丝固定到位。支撑脚也需要与地面产生摩擦,所以旧鼠标垫派上了用场,它被剪成合适的形状,并粘在支撑脚的底部。 轴承支架两侧各有两个孔,可装入直线轴承,然后将其粘合到机架后面的切割槽中。机架和轴承支架上有对准标记,可实现精确组装,粘合前应对准。轴承架需要粘到顶板底部。顶板底部的对准孔和轴承架上的孔可轻松组装。将轴承架粘合到位后,需要将铝棒切成两段,长度为 60 毫米。这些杆穿过直线轴承,允许滑动运动并限制其他方向的运动。驱动小齿轮的伺服器可以用螺丝固定在顶板底部。伺服器附带的圆形伺服喇叭安装在小齿轮后面的槽中,然后使用两个 2.5M 六角螺钉(10 毫米长)将其固定到位。现在可以将小齿轮推入伺服头并拧紧。再次确保将伺服头旋转至90度(中间位置),并将齿条置于中间位置,拧紧小齿轮。虽然伺服头无需旋转至最大范围即可控制支撑腿的升降,但组装完成后,您也可以随时进行调整。 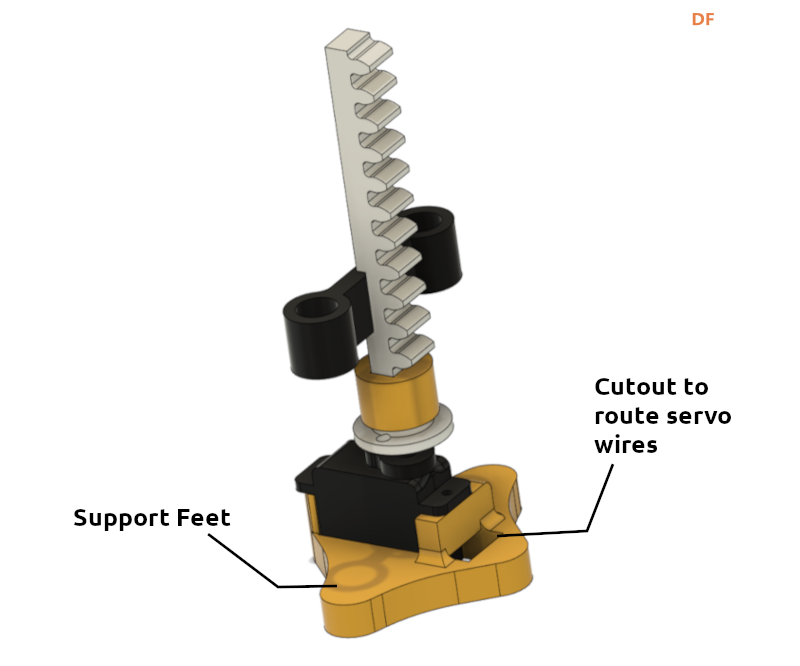  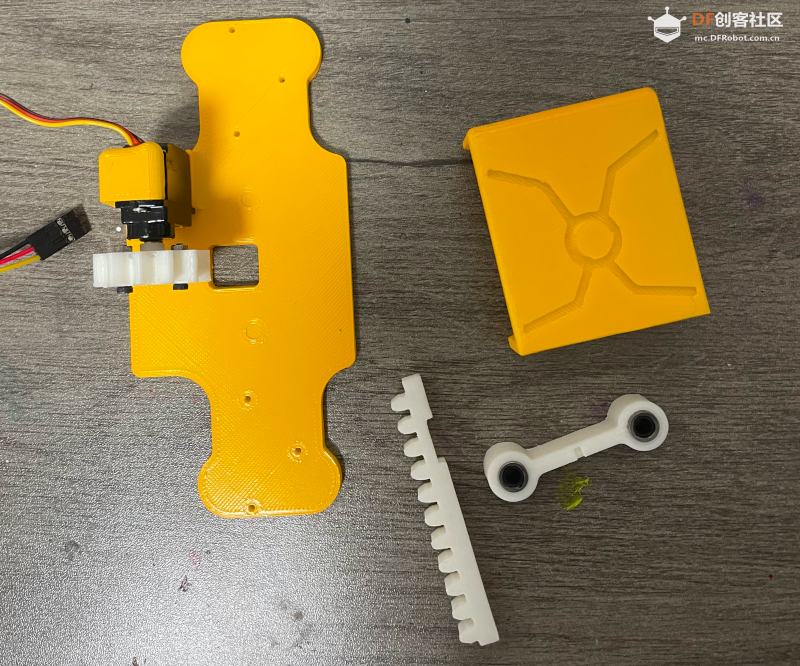 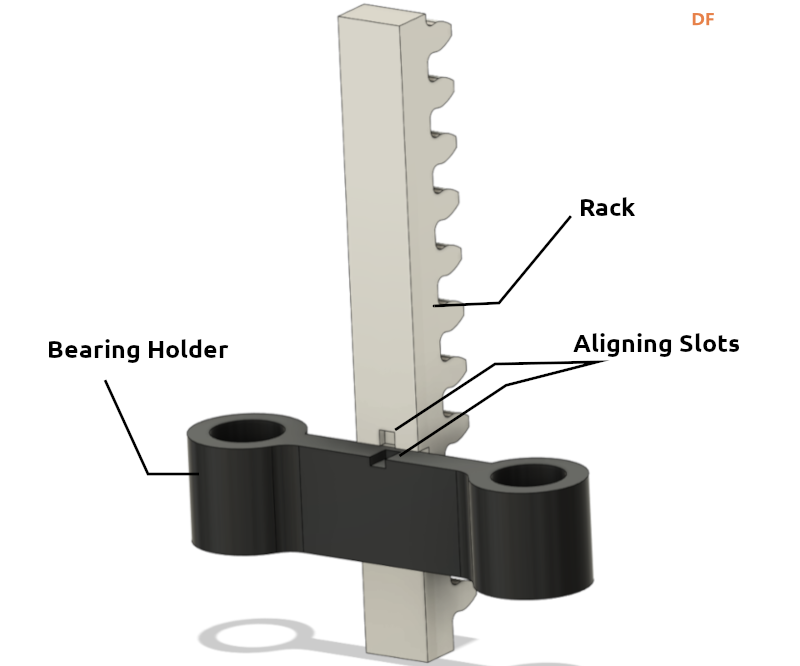 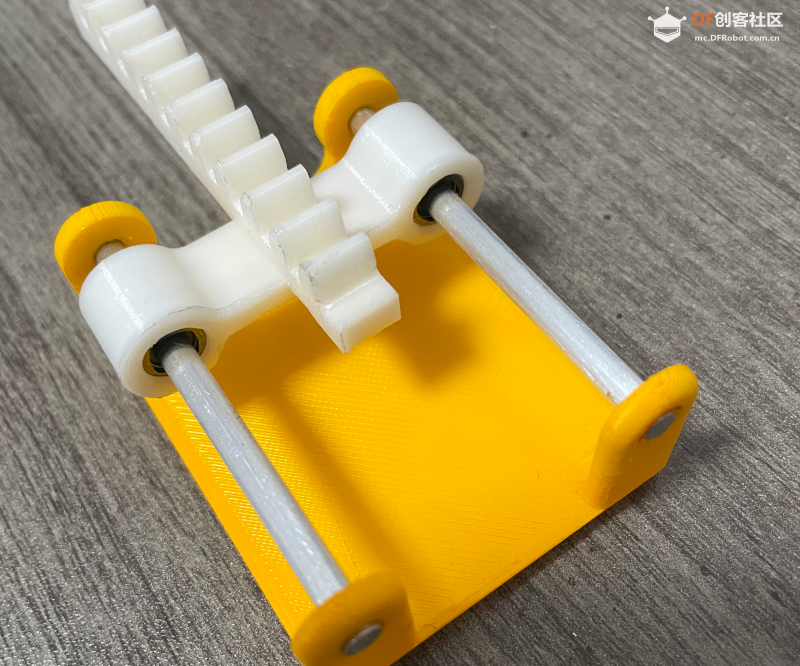 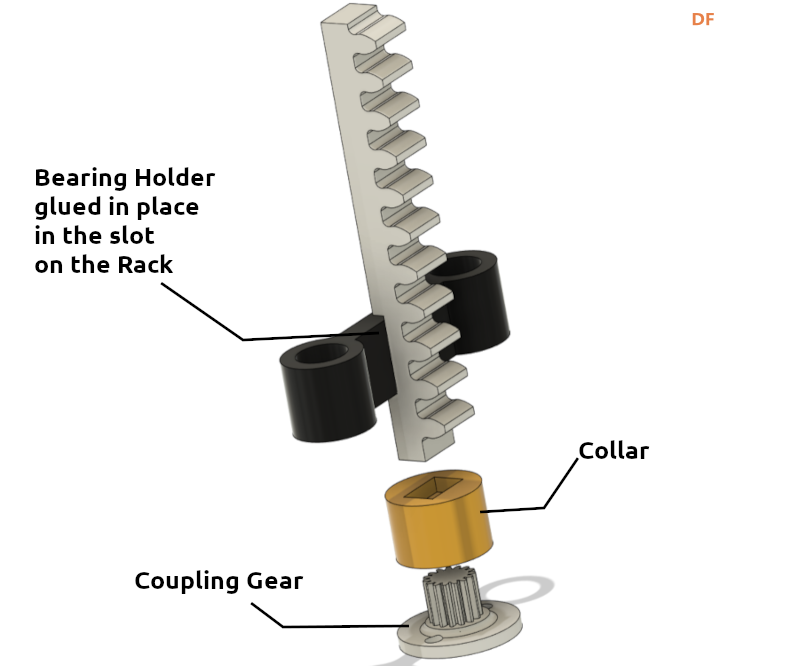 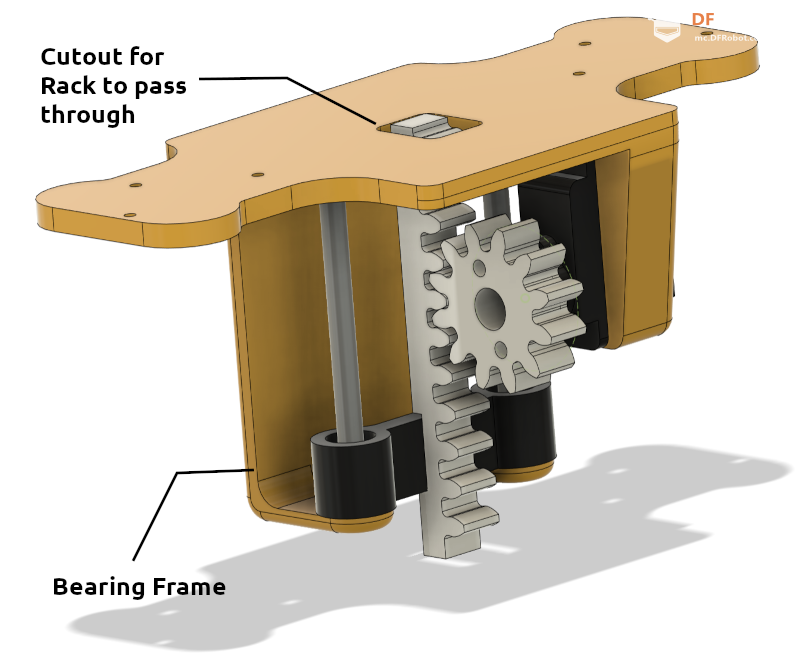 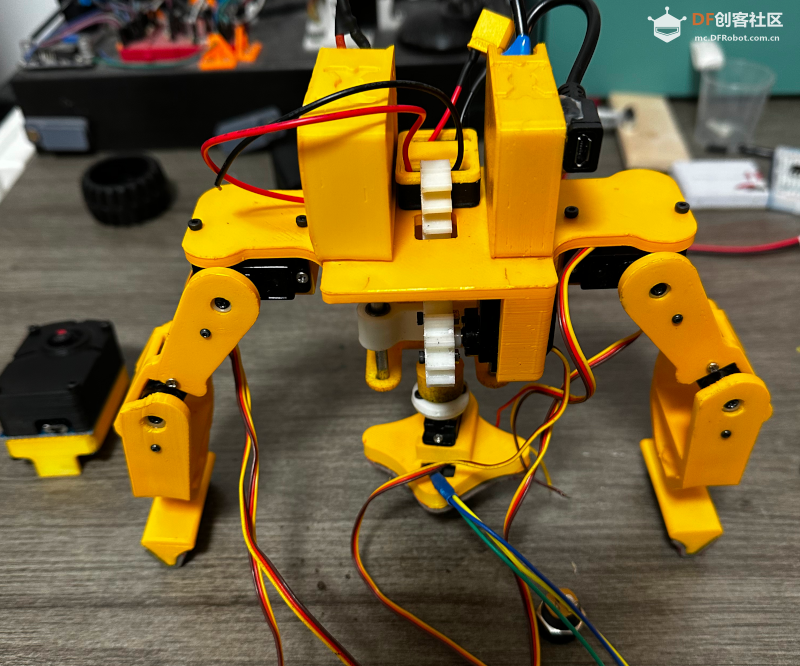 |
|
## 步骤7:头部和电池组 头部由前部和后部两部分组成,其中装有 ESP32 摄像头模块的穿孔板夹在头部的前部和后部之间。对准头部后,在穿孔板上钻四个孔。将四个螺纹嵌件插入头部后部的孔中,并使用四个 M2.5(25 毫米长)六角螺钉固定前部头部、穿孔板和头部后部。 电池组粘在两侧,较重的辅助电池组位于左侧,较轻的主电池组位于右侧。由于增加了驱动小齿轮的舵机,更多的重量向右移动,因此较轻的电池组位于右侧。电子元件整理好后,舵机的电线就可以通过头部后部的孔布线。 降压转换器放置在降压转换器外壳内,然后粘合在主电池组和辅助电池组之间。在将其密封在外壳内之前,请确保在输入电压为 7.4V 时将输出电压调整为 5V。  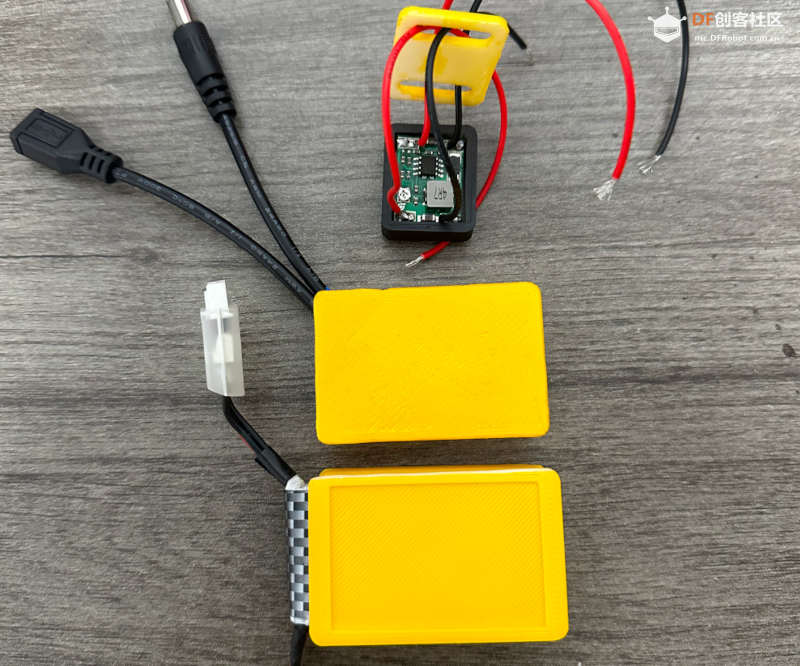  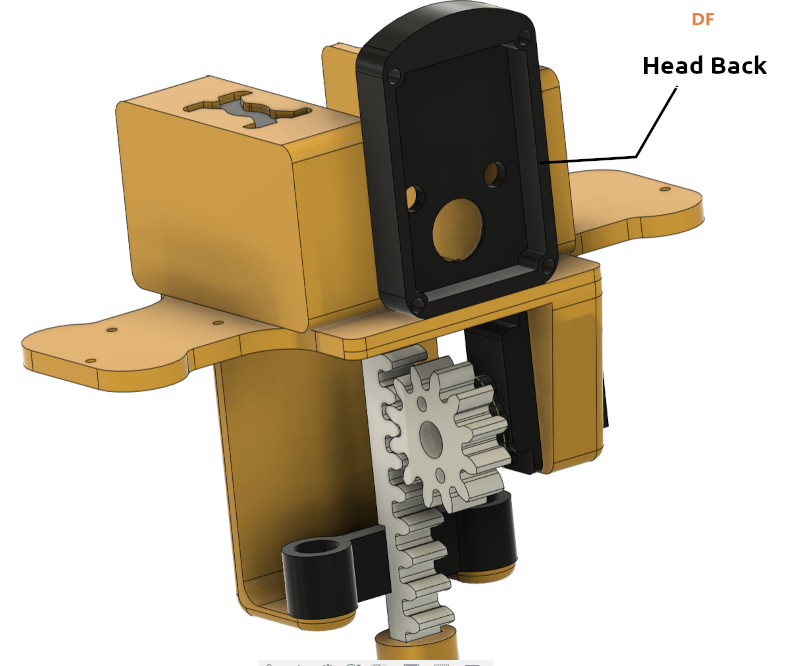 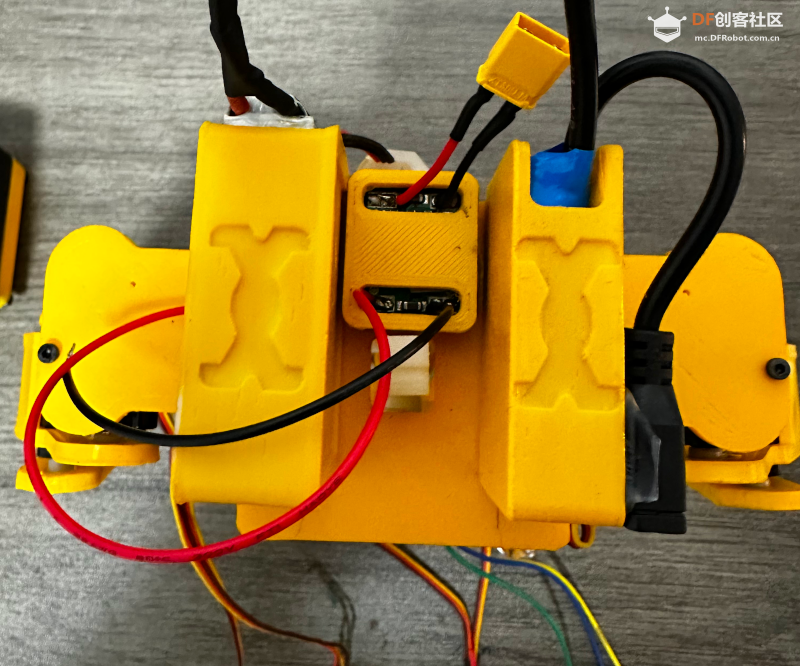 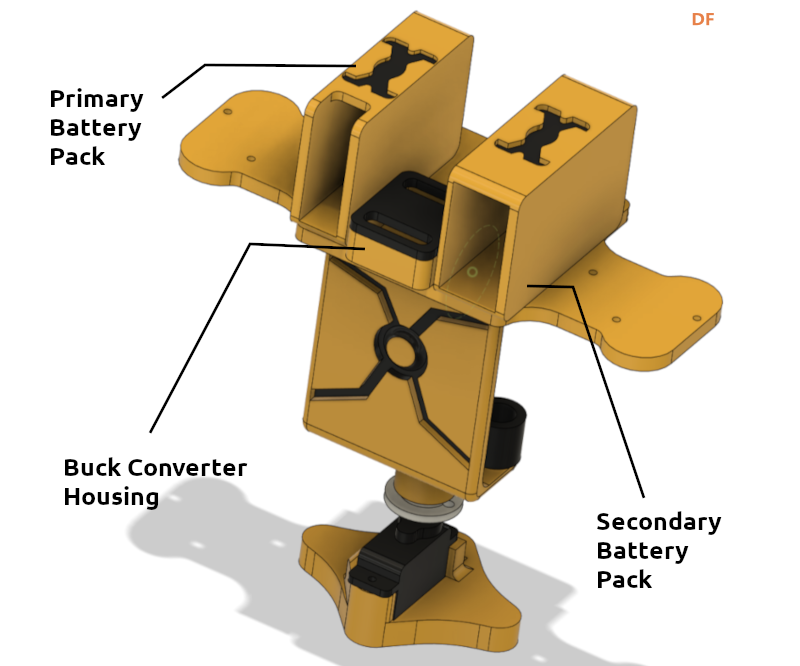 |
|
## 步骤8:接线 将穿孔板切割成 35 x 50 毫米的尺寸,然后将母头引脚焊接到板上。使用焊料制作了两条导轨,分别用作 GND 和 VCC(伺服电机电源)。检查头部正面的开孔后,应将滑动开关焊接到穿孔板上。这样,当头部闭合时,就可以操作开关。将连接件连接到相应的引脚,并从孔中引出电线。这样,我稍后就可以将电线焊接到伺服电机上,并清楚地知道需要多长的电线才能让腿部自由移动。 伺服连接如下: 支撑脚底座伺服器 - IO 4 右腿顶部伺服器 - IO 12 左腿顶部伺服器 - IO 13 右腿底部伺服 - IO 14 左腿底部伺服器 - IO 15 小齿轮伺服 - IO 2 ESP32 摄像头和伺服器均通过电容供电,以平滑任何电压尖峰,避免伺服器运动抖动和摄像机镜头出现故障。伺服器通过 1000uF 电容供电,ESP32 摄像头通过 470uF 电容供电。最初,我尝试使用 7.4 V 电池同时为伺服器和 ESP32 供电,但 ESP32 模块出现了断电现象,有时还会导致摄像机信号出现故障。我推测这是由于电压尖峰和电源线不规则造成的。隔离电源后,一切正常。添加电容后,效果也确实有显著的改善。 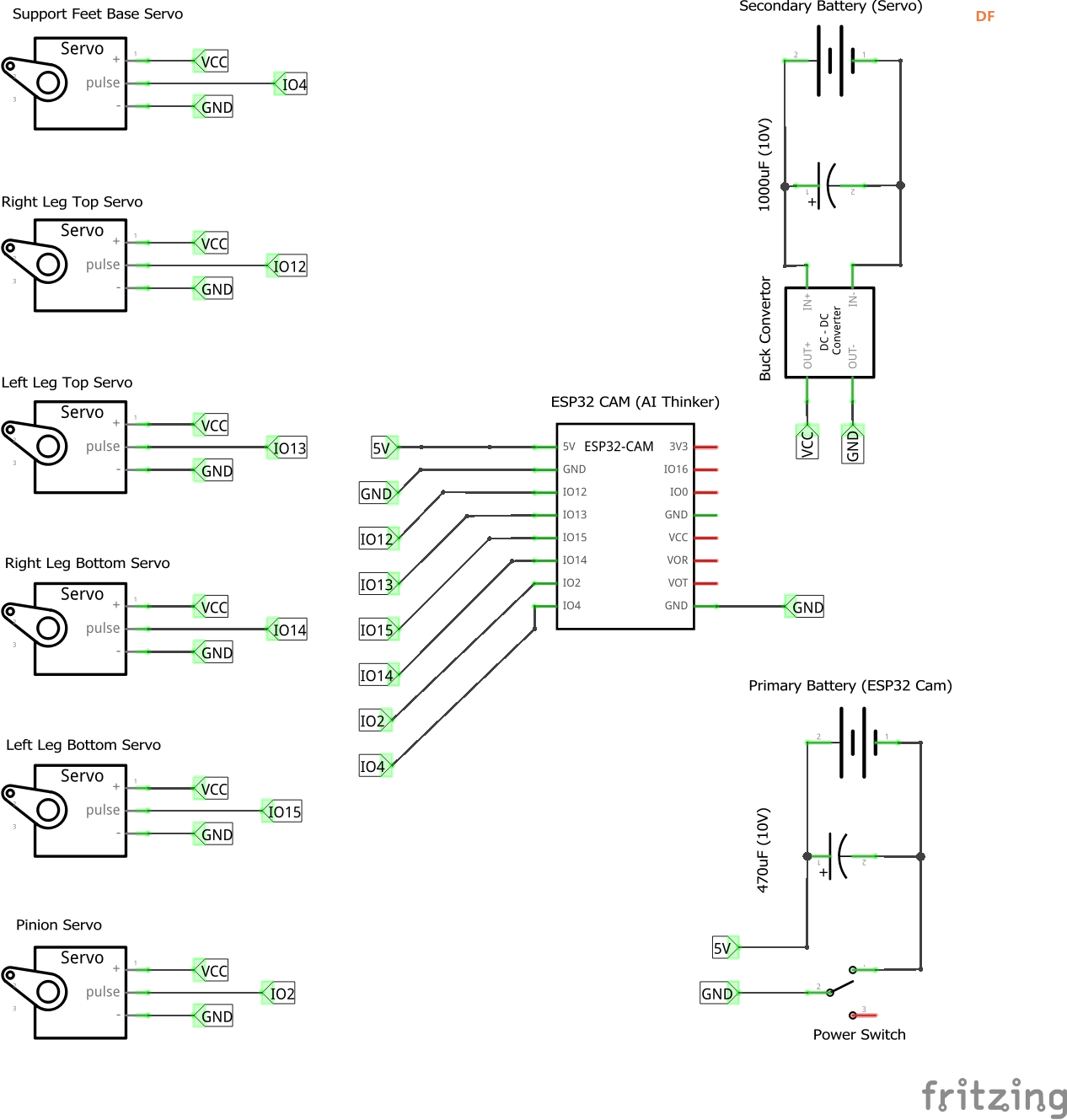  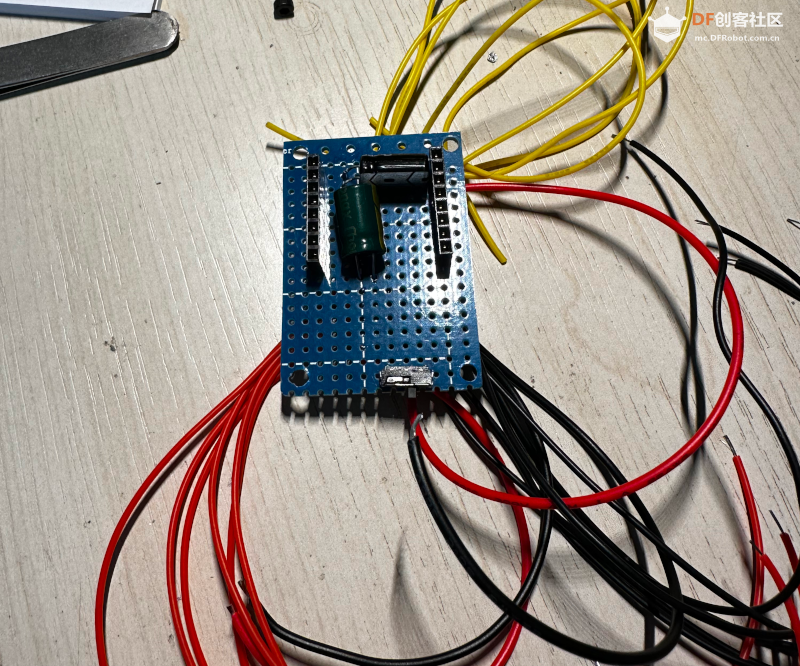 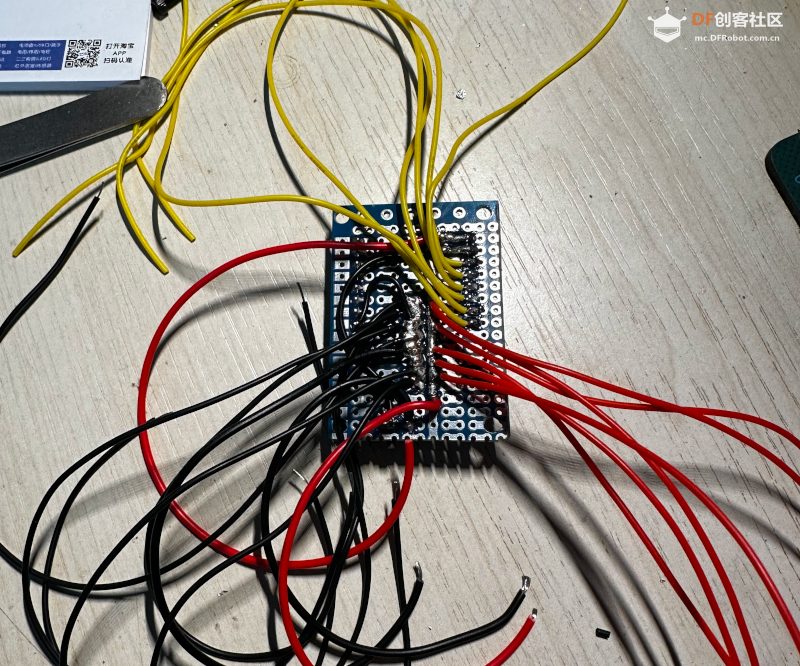 |
|
## 步骤9:运动学分析 运动学分析 为了加快开发进程,对运动进行运动学分析始终是必要的。由于我们关注的是确定伺服器需要移动的角度来定位小腿的末端,因此使用逆运动学模型会很有帮助。在这种情况下,我们的主要目标是确定角度θ1和θ2,它们分别是大腿和小腿的伺服器角度,而不太关心小腿末端相对于垂直轴(Y)的角度,因为无论角度如何,脚尖的圆形设计都能提供与地面的充分接触。 下面是一段 Python 代码,用于推导方程式并确定角度。在我的案例中,在为支脚添加摩擦垫后,连杆长度 L1 和 L2 分别确定为 42 毫米和 72.5 毫米。已知变量为 L1、L2、x 和 y,需要计算的是角度 theta1 和 theta2。 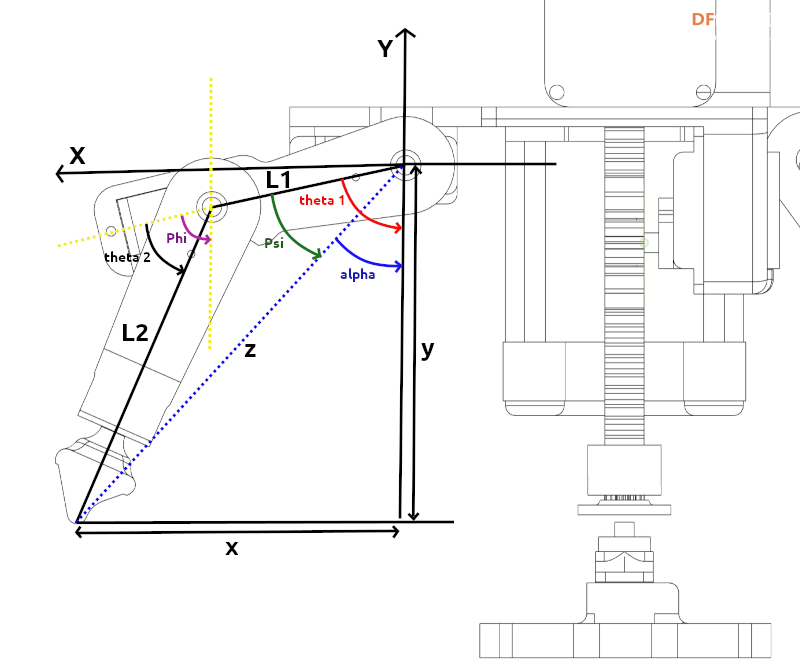 |
|
## 步骤10:STL和代码 需要注意的是,将代码上传到 ESP32 Cam 模块时,您需要使用带有引导加载程序的 ESP32 Cam-MB 来上传代码。您需要按下 ESP32 Cam-MB 上的 IO 0 按钮,然后按下 ESP32 模块上的 RST 按钮,以使开发板接受代码上传。此外,您还需要从 Arduino IDE 的库管理器下载 Kevin Harrington/John K. Bennett 编写的 ESP32Servo 库。 在代码文件中更新您所需的密码以连接到 Dodge。代码上传后,您可以在 WIFI 网络上看到它,名称为 Dodge-Tripod。上传代码后,请务必按下背面的 RST 按钮重置 ESP32 Cam 模块。连接到 Dodge-Tripod,然后打开浏览器,在手机/电脑的 URL 中输入 192.168.4.1,即可连接到 Dodge Control App。请确保已为主电池和备用电池供电,然后即可开始使用。 代码和3D模型 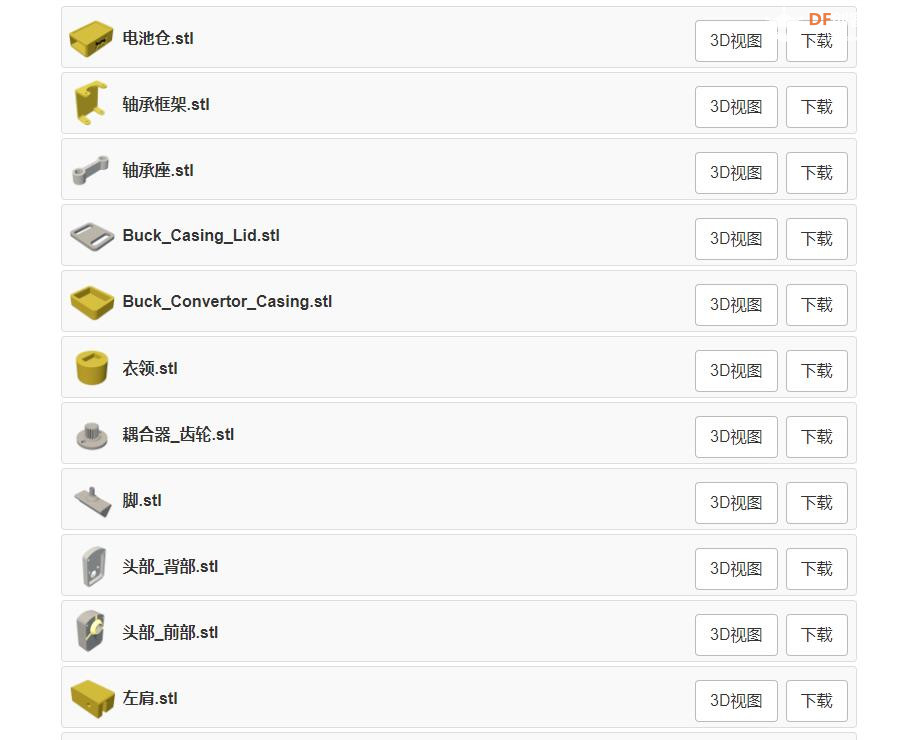 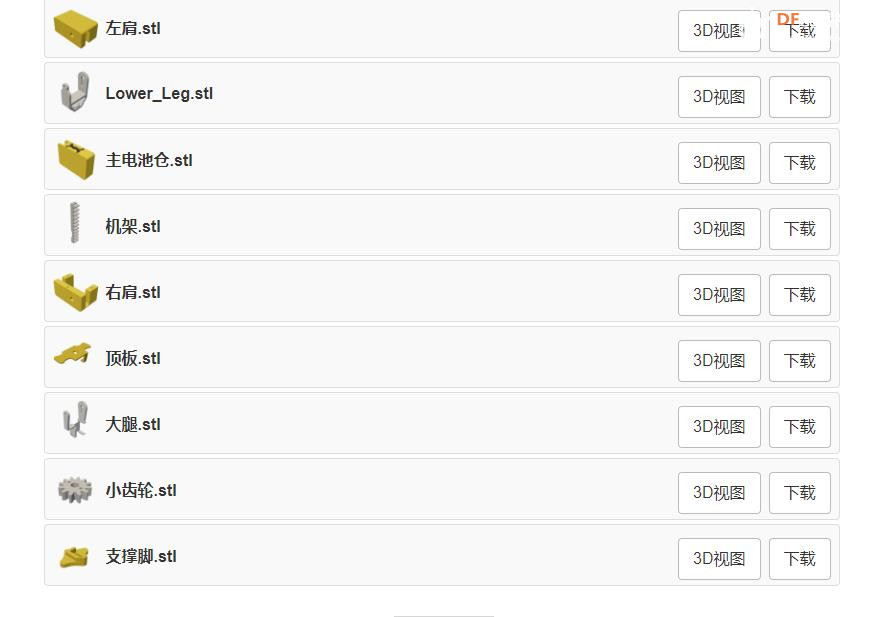 |
|
## 步骤11:结论 搭建完成后,值得注意的是,当机器人的整个重量压在支撑腿上时,支撑腿会有些晃动,因为我在支撑腿上的伺服器上用了一个塑料伺服喇叭。或许可以用铝制喇叭来解决这个问题,这样可以防止喇叭变形或弯曲。 Dodge 是一款小型机器人,可以在室内使用,它能够捕捉视频,让我可以监控房屋周围环境。它也可以用作桌面机器人。如前所述,我的下一个目标是将其视频数据传输到 Raspberry Pi,用于人脸检测和图像识别。除此之外,除了已经完成的功能外,它还可以通过编程实现许多其他动作,我希望尝试一下,如果有机会,我会更新这个教程。 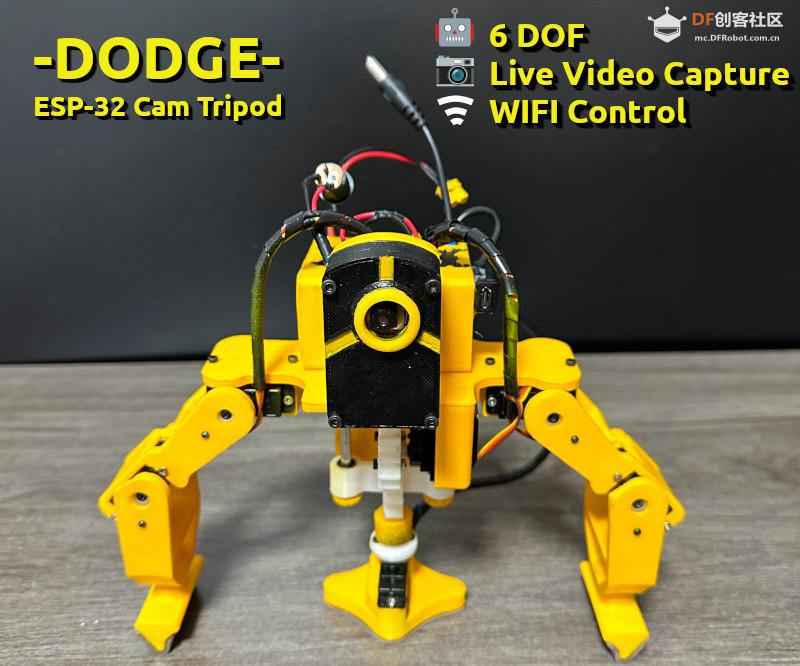 |
|
附录 【Arduino 动手做】由ESP32 Cam模块驱动的全方位监控机器人 项目链接:https://www.youtube.com/watch?v=WIU3OHDz7Xk 项目作者:马尔代夫马累 hannu_hell (我热衷于一切机械的东西,并融入艺术和创意。就像一块废金属,在计算机的二进制世界里,与电火花融合在一起。) 项目视频 :https://www.youtube.com/watch?v=WIU3OHDz7Xk 项目代码和 3D 文件:https://github.com/hannu-hell/Dodge-ESP32-Cam-Tripod  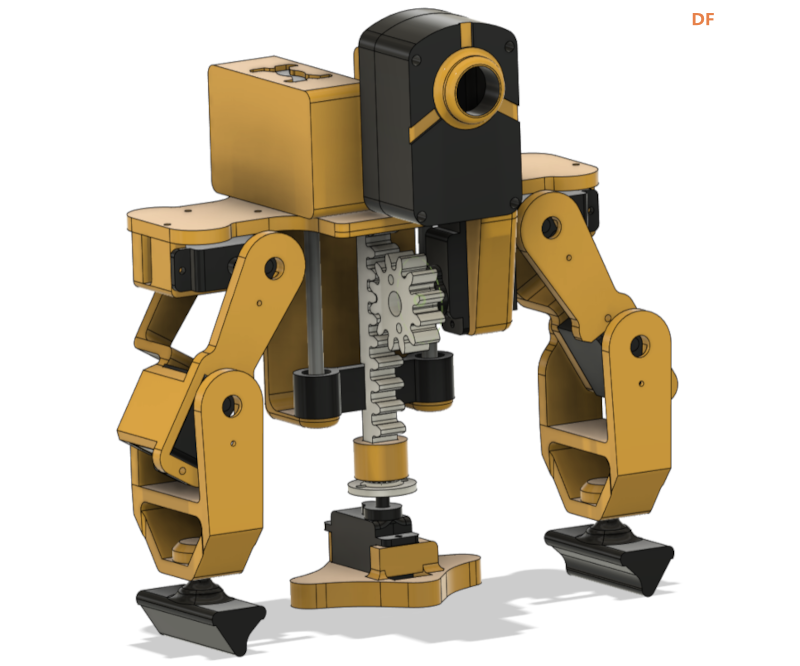  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






