|
1341| 3
|
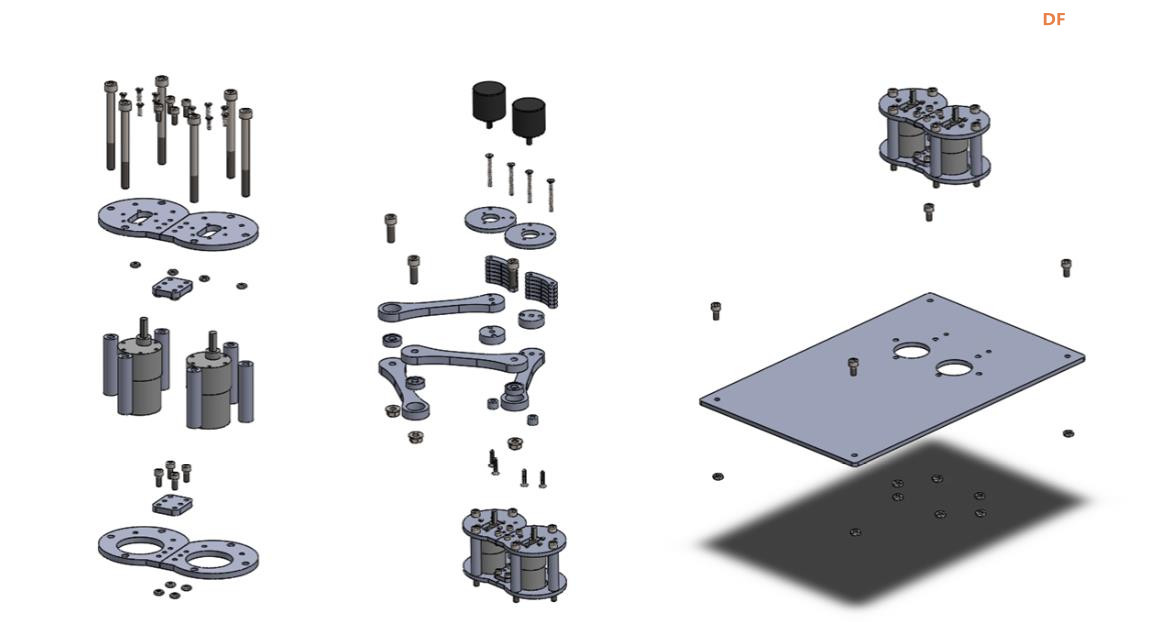
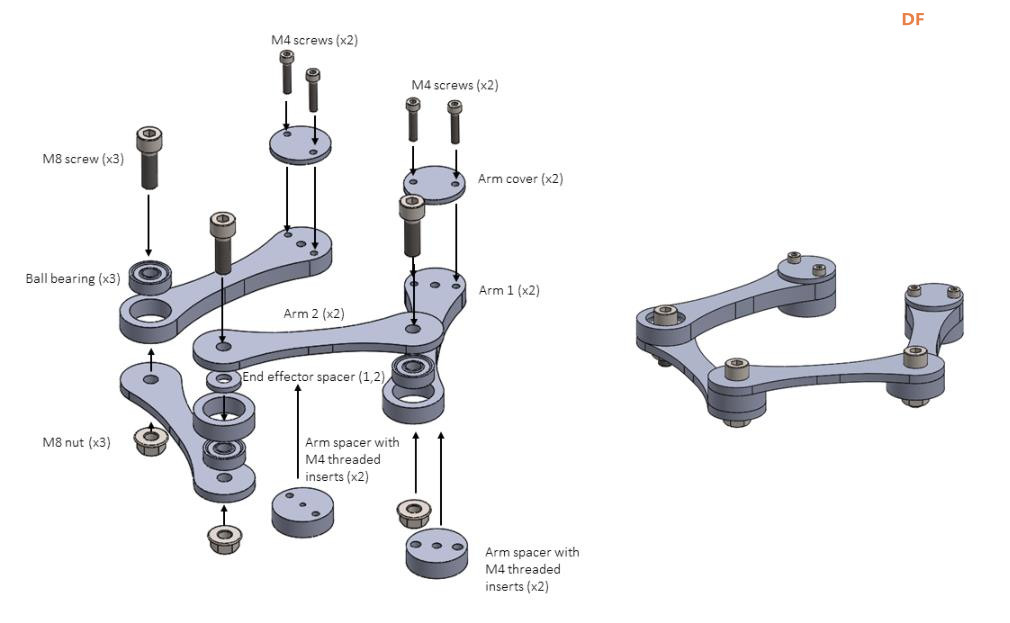
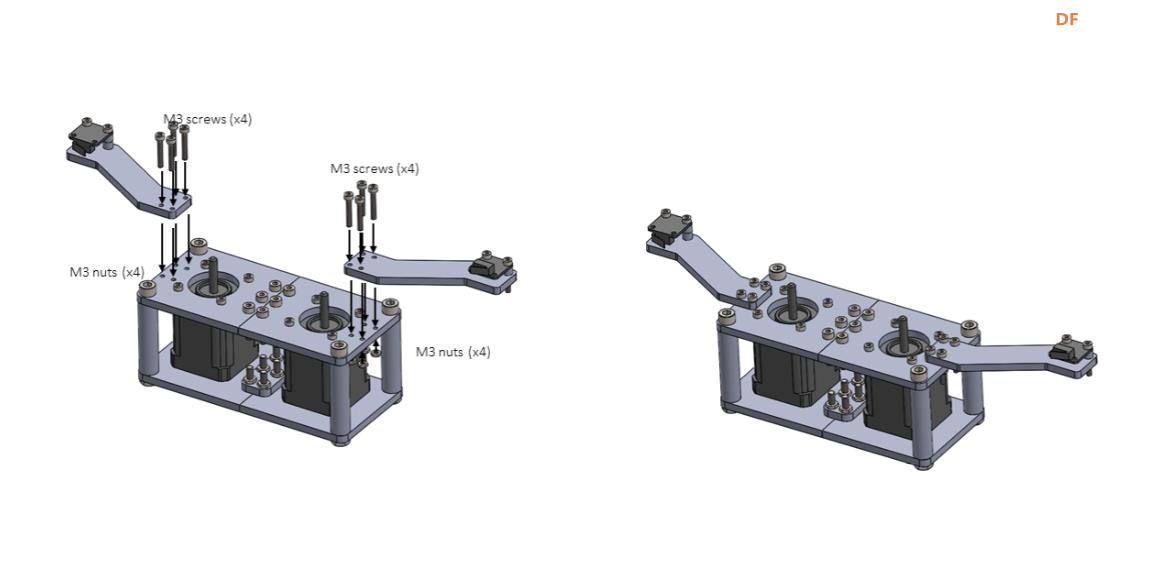
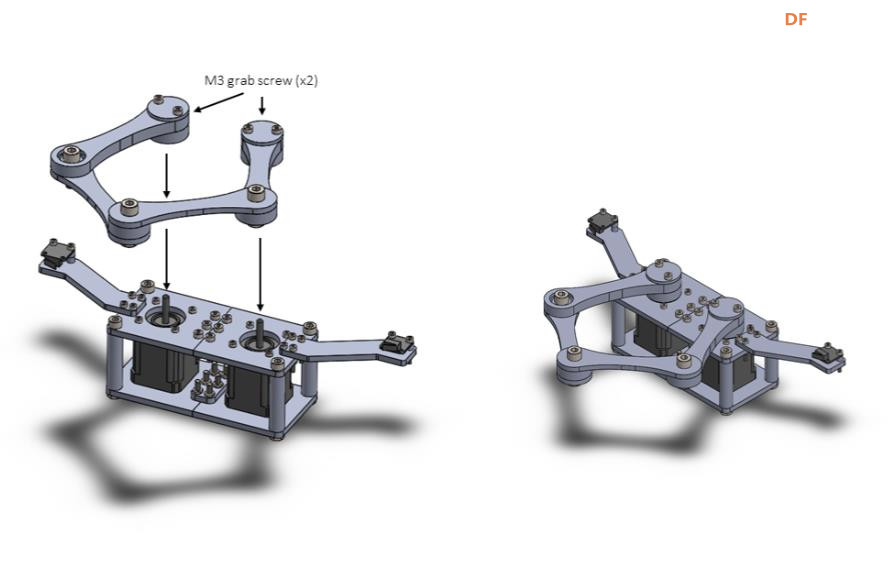
[项目] 【Arduino 动手做】教育型平面五杆并联机器人 |
|
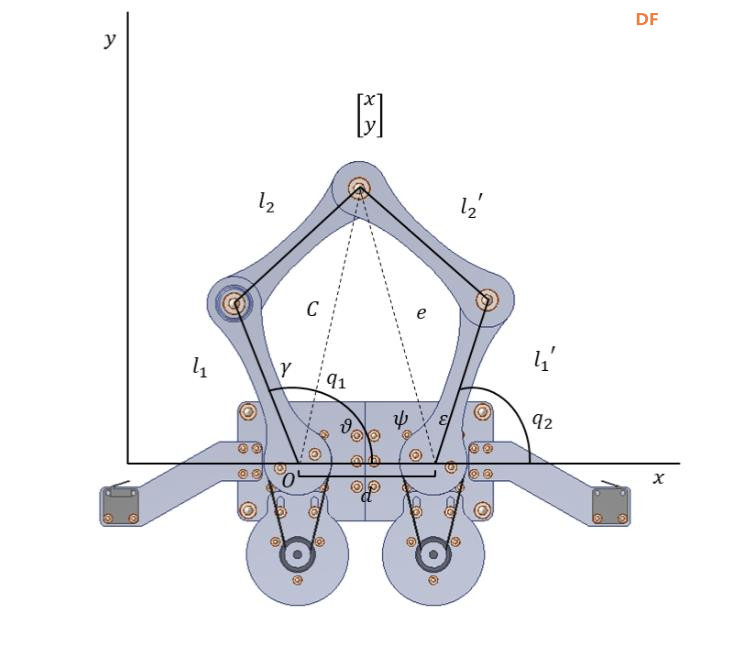
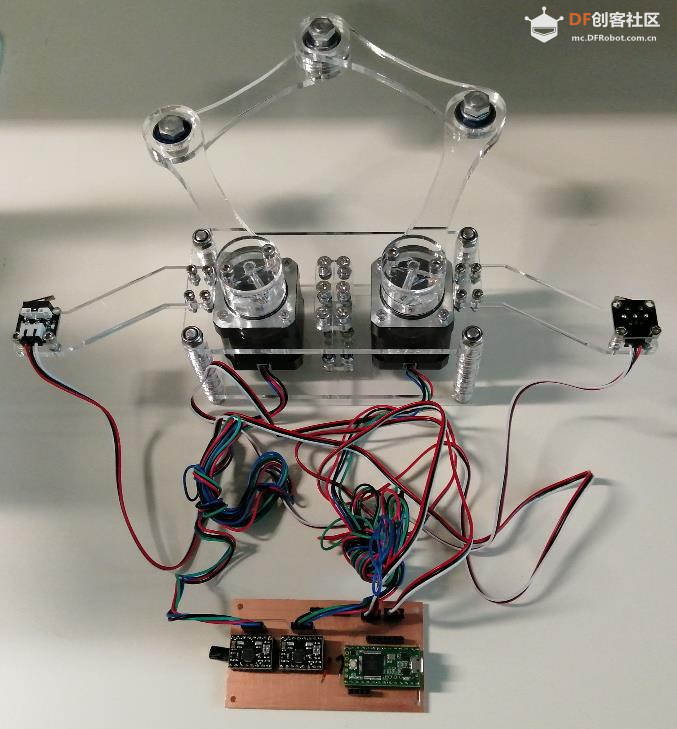
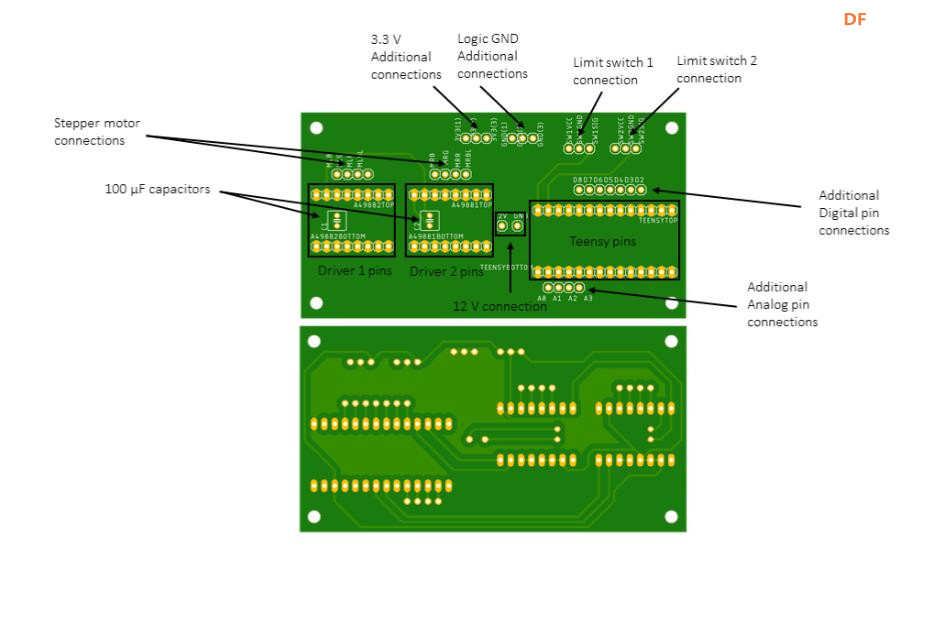
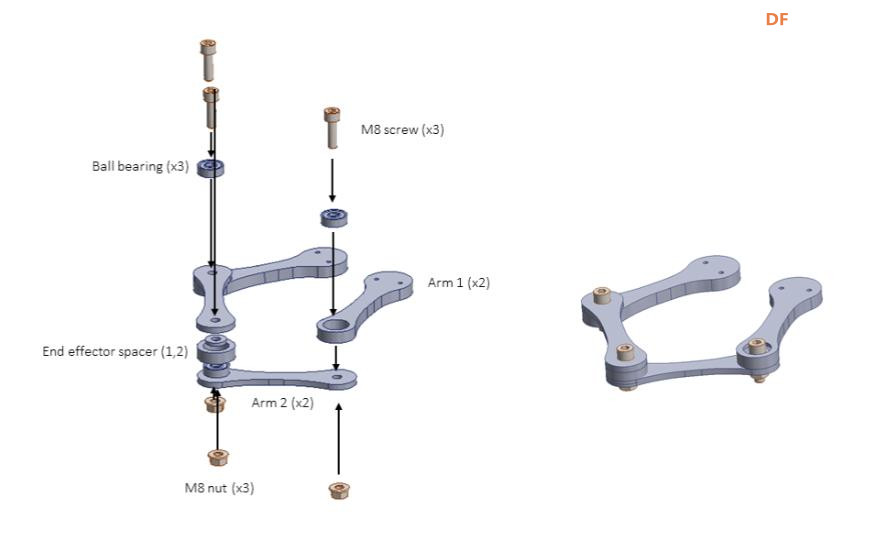
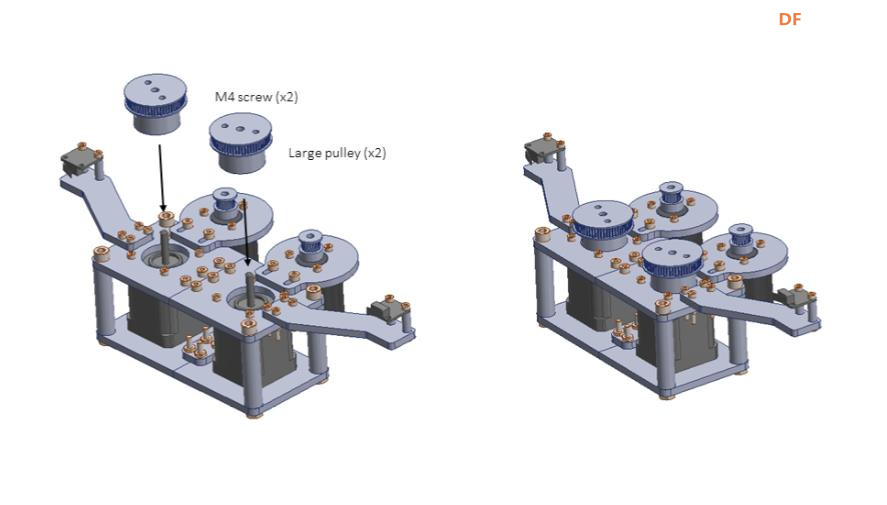
设计用作第一个机器人,向学生介绍机器人概念,例如:逆运动学和控制算法。 有了这个平面机器人,您可以使用正向和逆运动学和控制算法。 第二版和第三版基于 Teensy 3.2 微控制器、步进电机和限位开关。 第三个版本有两个额外的孔,用于连接使用定时 GT2 皮带连接到机器人关节的两个增量编码器。 第一个版本涉及直流电机与编码器的闭环控制,同时涉及机器人中的运动学概念。 第二版的基本程序使用了teensyste.h库: https://luni64.github.io/TeensyStep/index 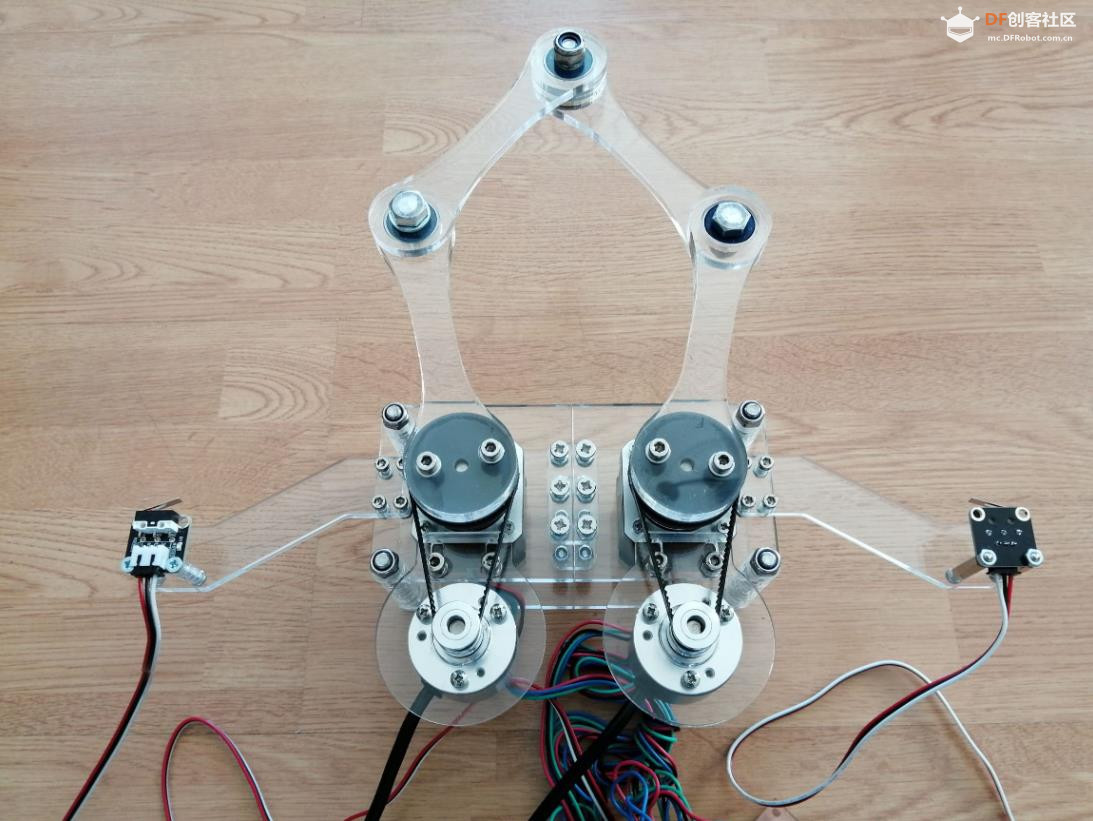  |
|
附录 【Arduino 动手做】教育型平面五杆并联机器人 项目链接:https://hackaday.io/project/1733 ... -bar-parallel-robot 项目作者:哈维·卡诺 项目视频 : 光电鼠标位置控制:https://www.youtube.com/watch?v=05XyfAV1to4 重复性测试 Y 轴:https://www.youtube.com/watch?v=BfiHG13mHDs&t=4s 基本矩形绘制:https://www.youtube.com/watch?v=c6jG3WN4W8Y 项目代码和 3D 文件: https://cdn.hackaday.io/files/17 ... el%20robot%20V1.zip teensyste.h库:https://luni64.github.io/TeensyStep/index 如果您想用鼠标控制机器人(它可以通过许多其他界面进行控制,如触摸屏、操纵杆或发送轨迹形成矢量),您需要这个库: https://github.com/zapmaker/OptiMouse 电机驱动器库(可以使用其他电机驱动器,例如L298N): https://github.com/pololu/dual-mc33926-motor-shield PID 控制器库通过编码器位置控制闭环中的电机位置: https://github.com/DonnyCraft1/PIDArduino   |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






