|
1749| 1
|
[项目] 【Arduino 动手做】五连杆、双自由度并联机器人 - Big J |
|
Big J 是一款五杆并联机器人,使用直接驱动无刷电机作为执行器,与 Janus 控制器板配合使用。 摘要:在本文中,我们提出了一种具有五个链接和两个自由度的并联机器人设计方法,该方法利用技术工具简化了设计过程。使用模拟器可以在不需要使用和计算系统动态模型的情况下进行设计,从而简化设计过程并允许有效地调整设计。该方法以流程图的形式提供,其中开发了以下步骤:问题和约束的定义、逆运动学计算、链路长度建议、致动器建议、链接设计和材料建议、CAD 设计、动态仿真、有限元分析、原型构建、微控制器编程、功率级选择和接口设计。开发了一个具有五个链接和 2 个自由度的并联机器人来举例说明设计方法,并验证了它是否充分符合问题和定义的任务。 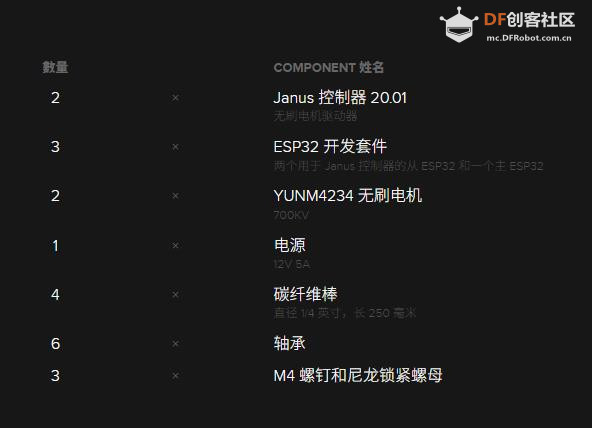  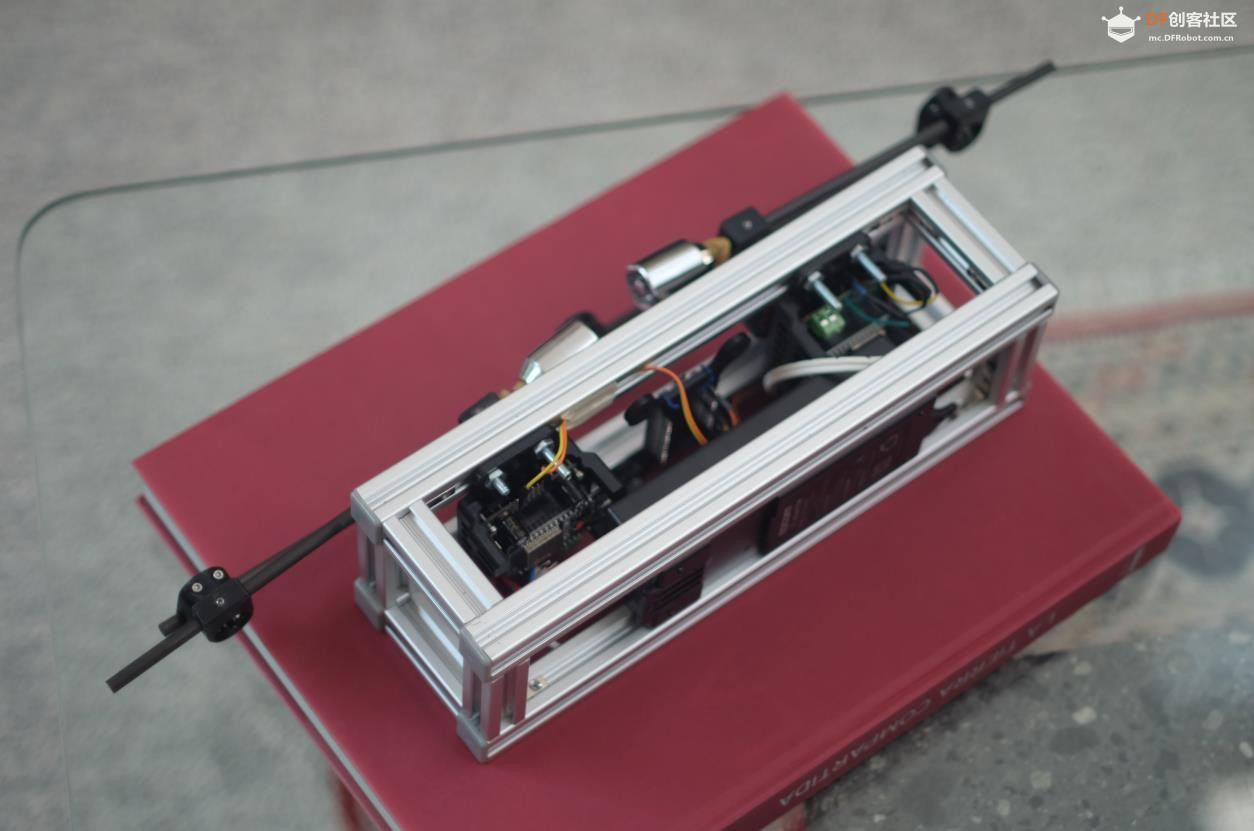 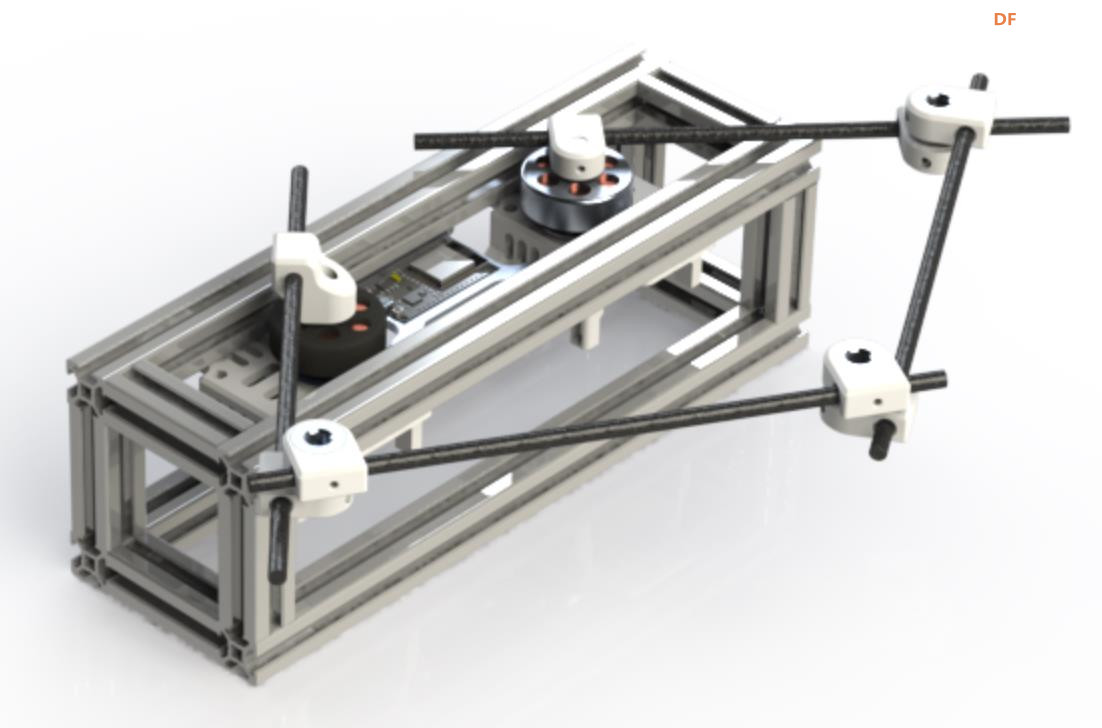 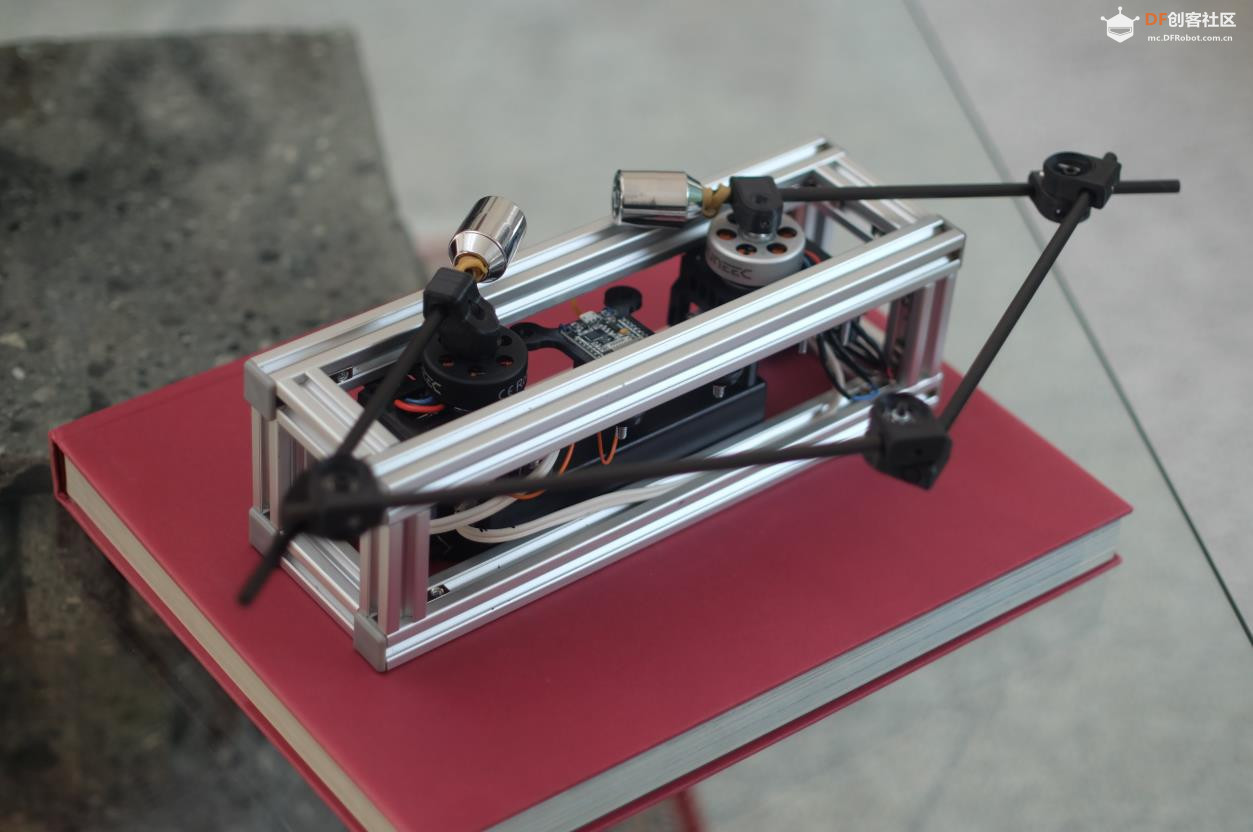 |
|
附录 【Arduino 动手做】五连杆、双自由度并联机器人 - Big J 项目链接:https://hackaday.io/project/173859-five-bar-parallel-robot-big-j 项目作者:大卫·冈萨雷斯 参考资料:https://www.redalyc.org/jatsRepo/614/61465285005/ 项目视频 : https://www.youtube.com/watch?v=JJa_QzbcREA 项目代码: https://github.com/byDagor/Janus-Controller https://github.com/byDagor/Dagor-Brushless-Controller  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






