|
1050| 1
|
[项目] 【Arduino 动手做】Delta-Robot 四摇臂机器人 |
|
用于自动化制造的四臂三角机器人的比例模型。我正在寻找更好的球形接头。与 M3 配合的万向节会很棒。 如果您使用我的设计之一,请告诉我!我很想看看你用它做了什么,并与其他感兴趣的人分享。 包含所有零件的套件可在 http://marginallyclever.com 处获得。 获得四套 http://www.pololu.com/catalog/product/733 获得四个业余舵机。我使用了 TowerPro SG5010。 获取 Arduino UNO 或更高版本。 获取 9v1a 电源。 购买一个小面包板。 打印一个末端执行器、四个 Bicep 和四个安装支架。 谨慎!图片中的安装支架在 X 轴上翻转。已更正上传的模型。您的机器人应该看起来像这个机器人的镜像。 按照照片中的那样组装。将伺服喇叭热胶粘在二头肌上。将 NUM_ARMS 更改为 4 。   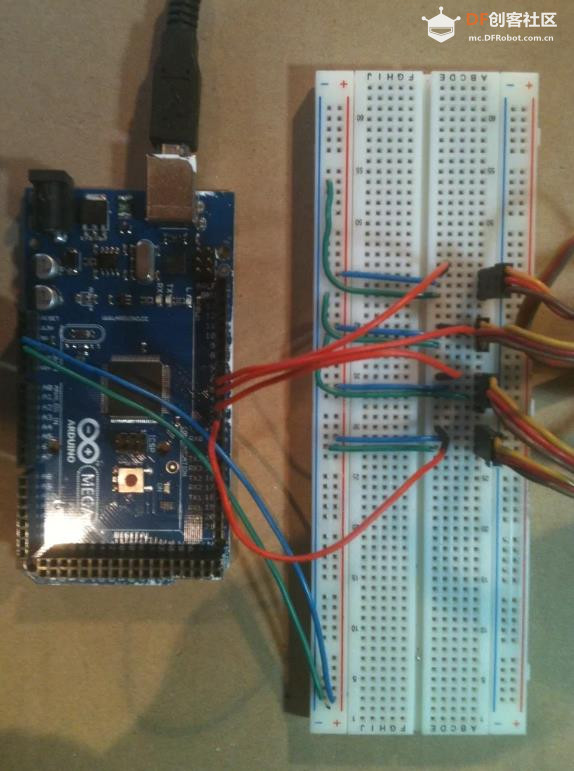 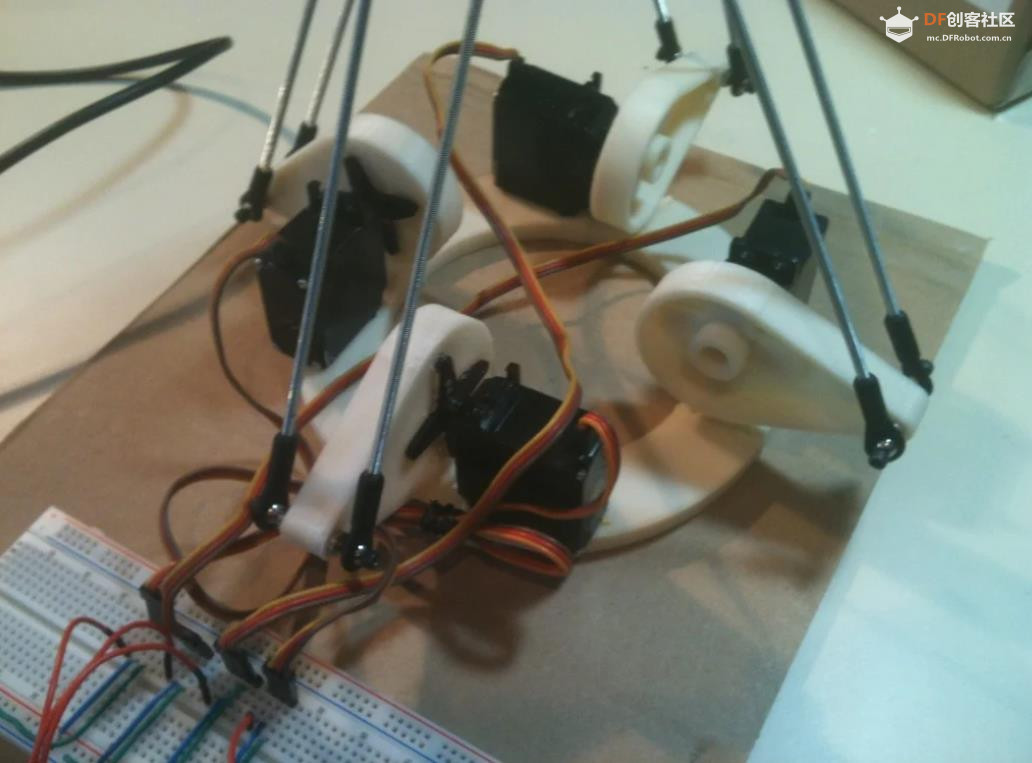 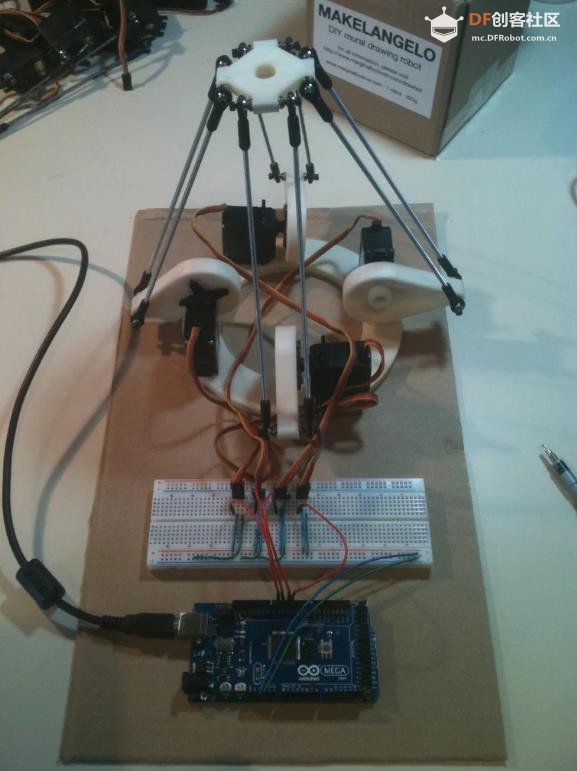 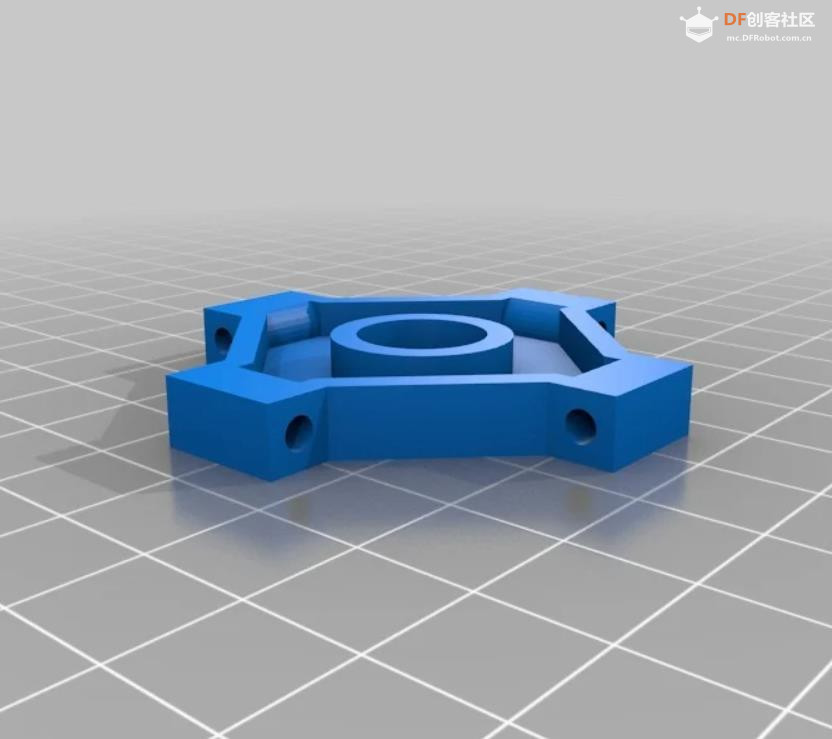 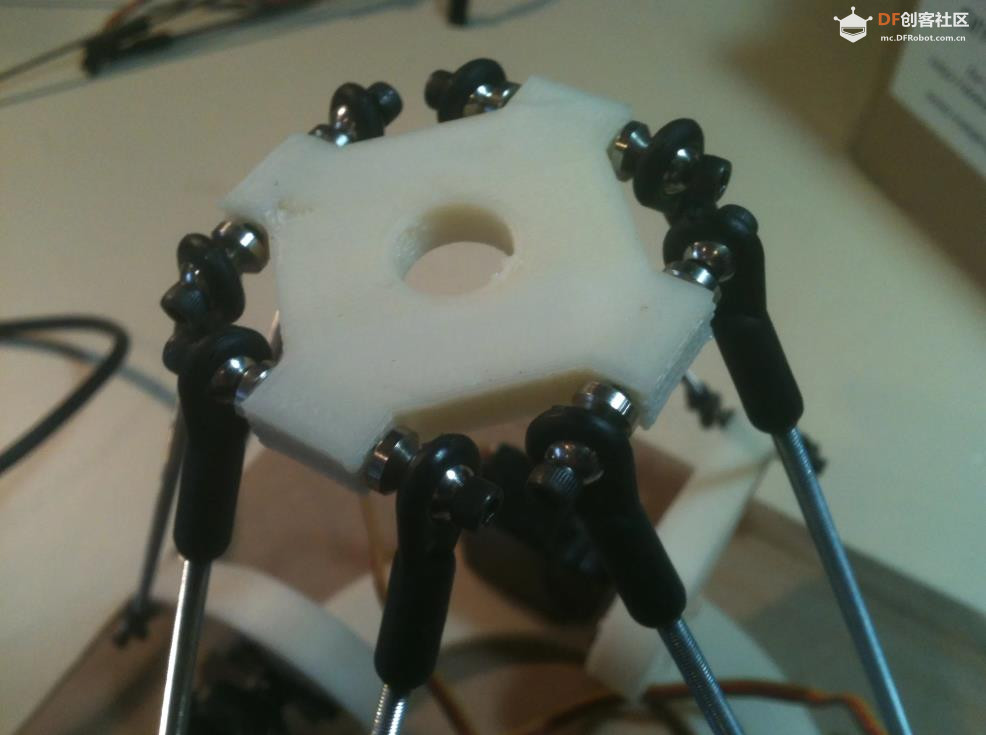 |
|
附录 【Arduino 动手做】Delta-Robot 四摇臂机器人 项目链接:https://www.marginallyclever.com/2013/02/four-armed-delta-robot/ 项目作者:i-make-robots 项目视频 :https://www.youtube.com/watch?v=okvIrxqSDBU 项目代码:https://github.com/MarginallyCle ... tree/master/arduino https://github.com/MarginallyClever/Delta-Robot 3D 文件:https://www.thingiverse.com/thing:46970 https://github.com/MarginallyClever/Delta-Robot/tree/master/stl  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






