|
2798| 11
|
[项目] 【Arduino 动手做】球形四足 Arduino 机器人 |
|
欢迎 两年前,出于好奇,我订购了一个没有电子和代码背景的 Arduino 入门套件。我不知道我发生了什么...... 在最初的两周里,我一直在努力简单地眨眼...... 几周和几个月后,一个又一个项目,使用 Arduino 的乐趣并没有消失,恰恰相反。 我在使用互联网出版物方面取得了切实的进展,现在是我分享自己的经验的时候了。 我很高兴推出我的第一个 Instructable。 本 Instructable 描述了一个球形四足机器人。机器人的底座是一个四足平台,有两个腿关节,全部集成到一个球形框架中。在待机模式下,机器人看起来像一个球体,并将自己变成四足动物来移动。使用超声波传感器来避免运动过程中的碰撞。 重量 : 440 克 尺寸 : Ø 130 毫米 / 5.12 英寸 运行时间(电池寿命) : 15 分钟 编程语言 : Arduino C/C++  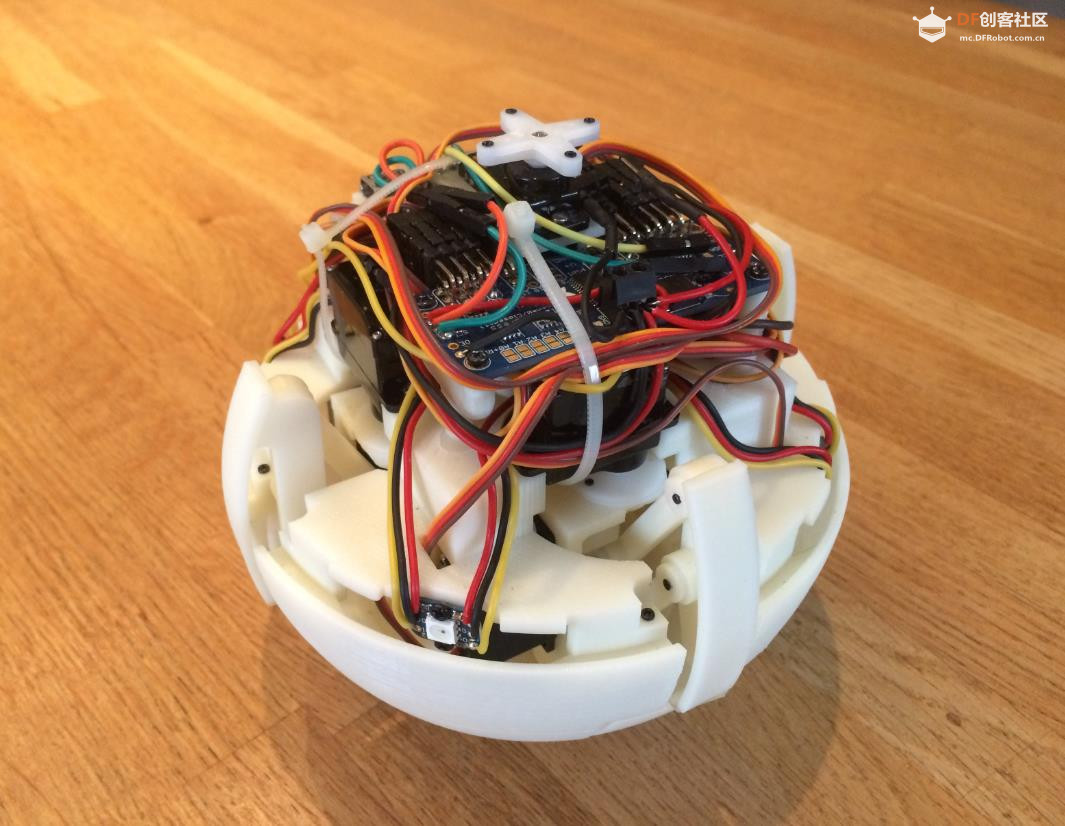  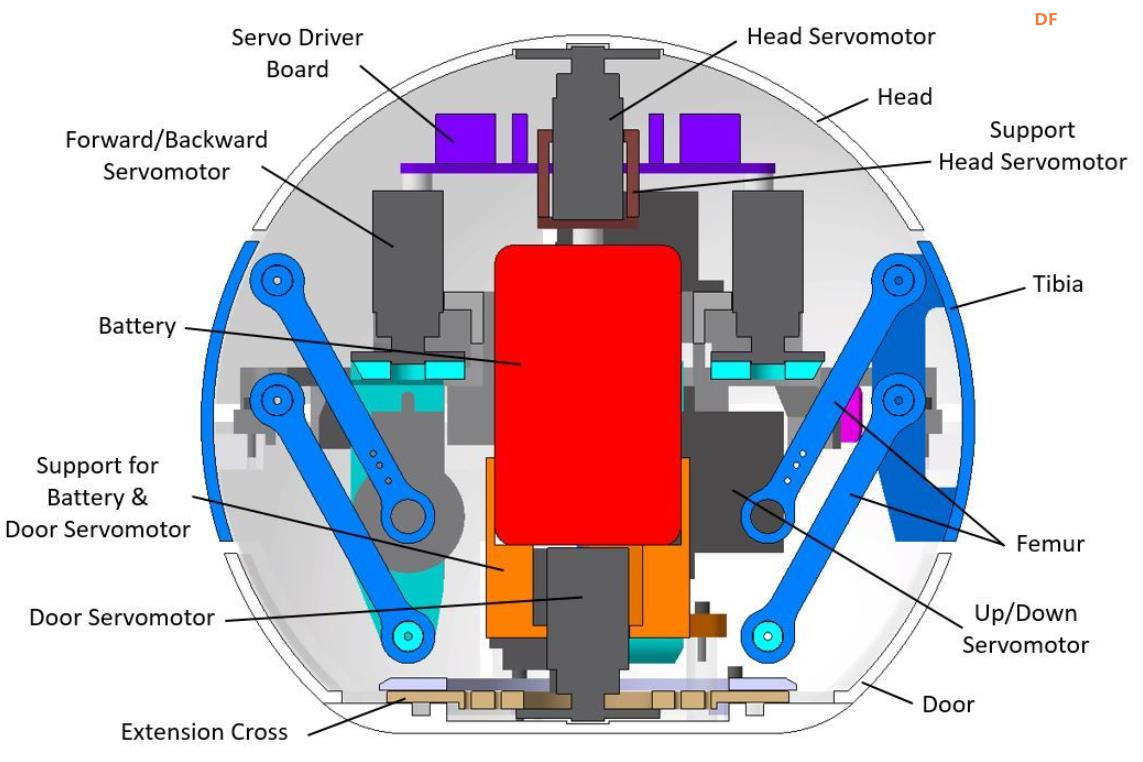  |
|
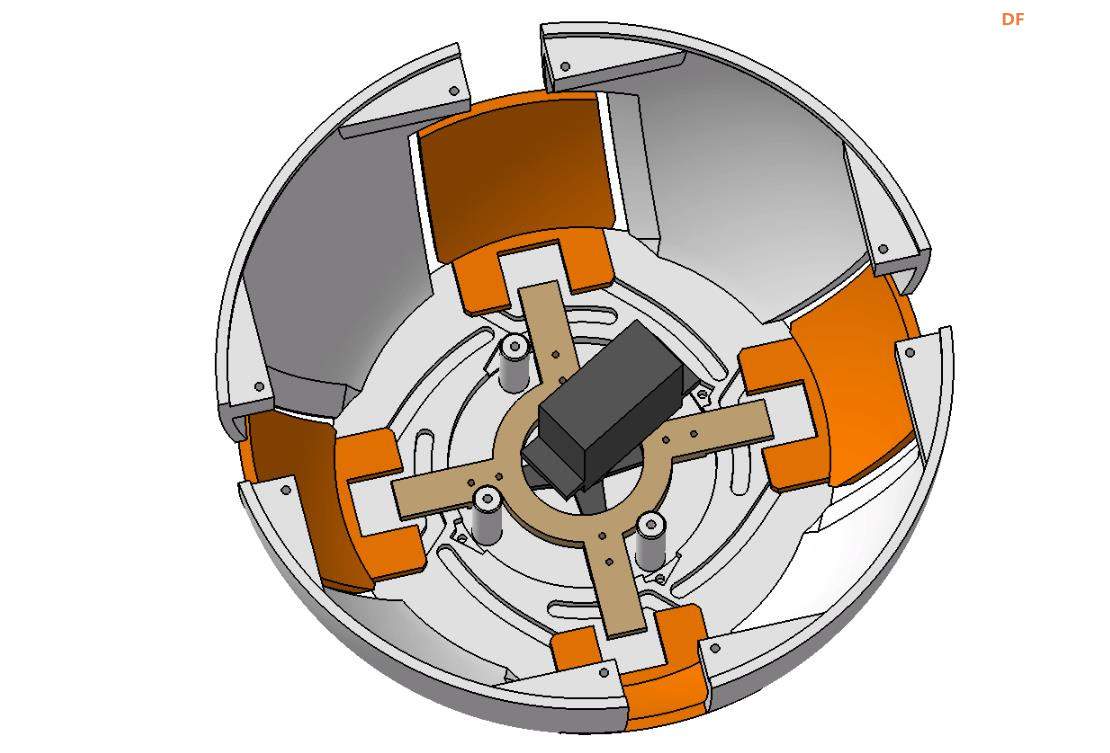
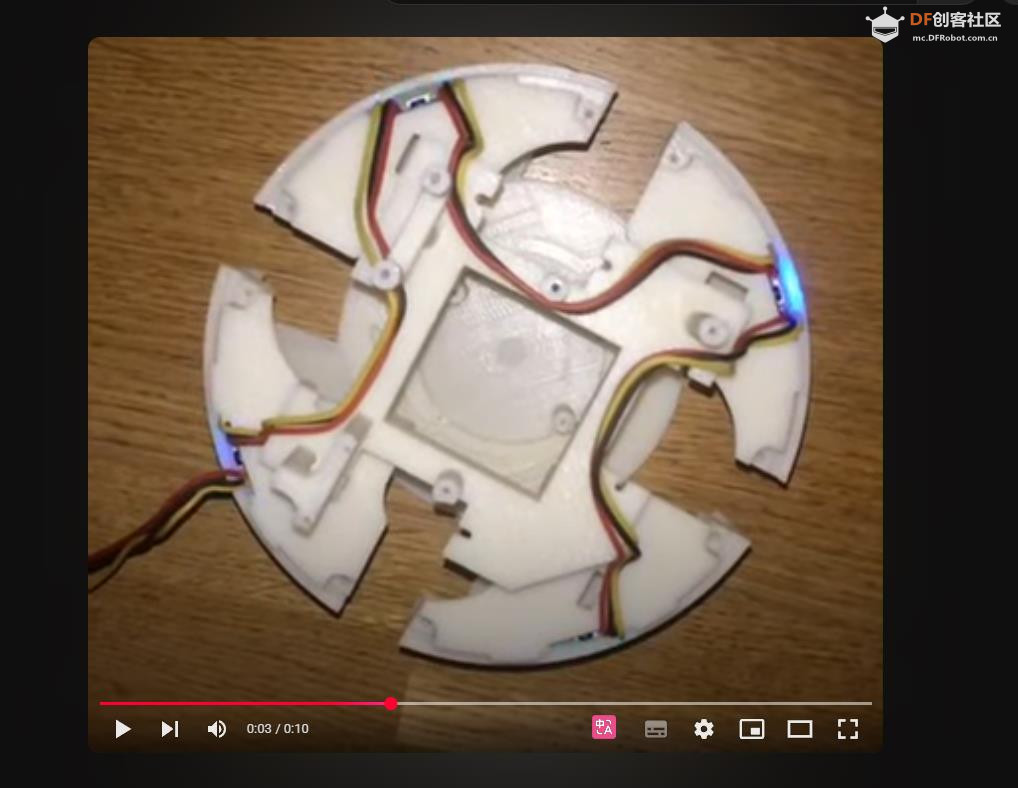
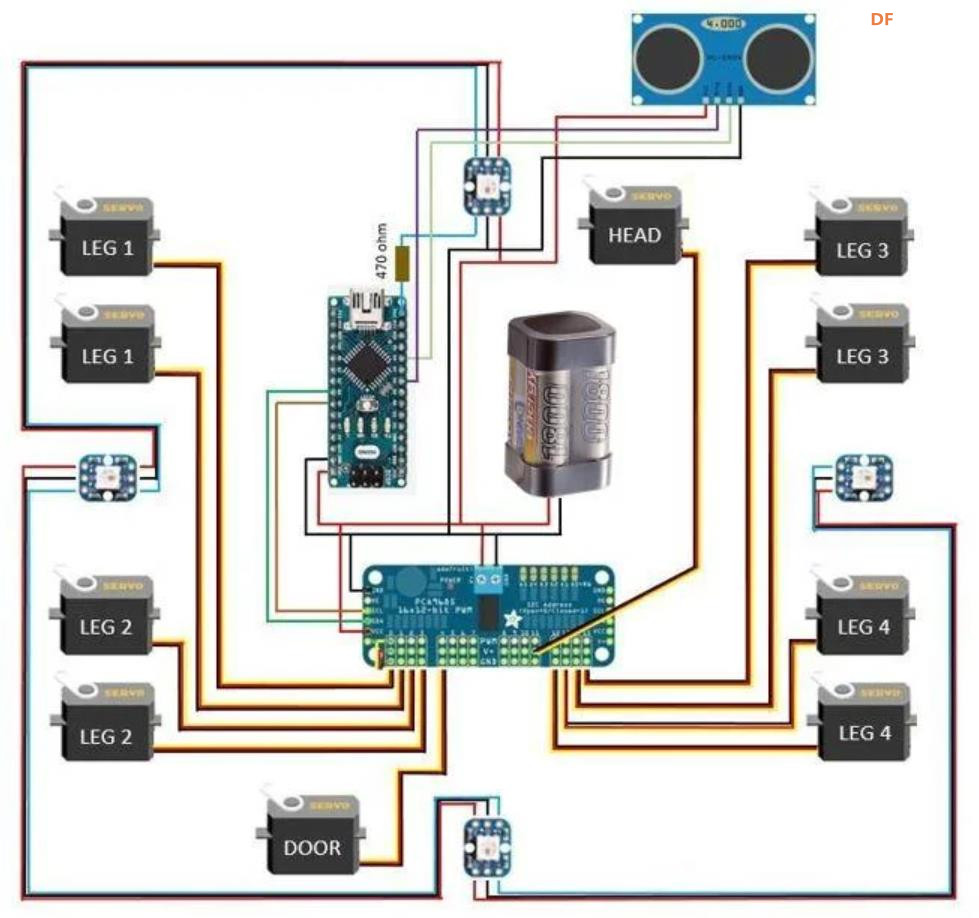
## 第 3 步:支腿 演示文稿 : 显然,这些腿是用来走路的,但它们也必须允许升降机器人。 在待机模式下,支腿必须不可见。 描述: 设计 腿有几种可能的概念。由于缩回区域(机身内部)的可用空间很小,因此首选通过支腿配备 2 个伺服电机的解决方案。一个用于前进和后退运动,一个用于上下运动。 为了弥补缺失的第三个伺服电机(“经典”四足动物每腿有三个伺服器,髋部、膝盖、踝部)并确保机器人的提升运动没有腿部滑动,我们在上下伺服电机上增加了一个平行边形运动,即两个功能与一个伺服电机,上下运动和腿部平行度。 为了优化空间,胫骨结构是缩回位置的头形的一部分。 电子的 每个支腿 2 个伺服电机和 4 个支腿意味着 8 个伺服电机,加上 1 个用于头部和 1 个门 = 10 个伺服电机。为了尽量减少使用的Arduino板引脚和电缆的数量,伺服电机由带有I2c接口的伺服驱动器控制,即只使用两个引脚。 Adafruit 伺服驱动器教程 走 有几种行走模式,一条腿接一条,两条相对的腿同时出现,四条腿同时出现,以及像运动幅度和运动速度这样的几个参数。结论:多种可能性。 此 Instructable 仅描述了一个解决方案(由您自行探索其他解决方案),同时描述两条相对的边。步行图如下所示。 腿部运动并不复杂,没有变换矩阵。常变量施加每个伺服电机的位置。 必须特别注意腿部的滑动效果,腿部与地面之间的良好摩擦对于保证正常行走至关重要。为了尽量减少这种现象,在腿部底座上添加了一些防滑垫。  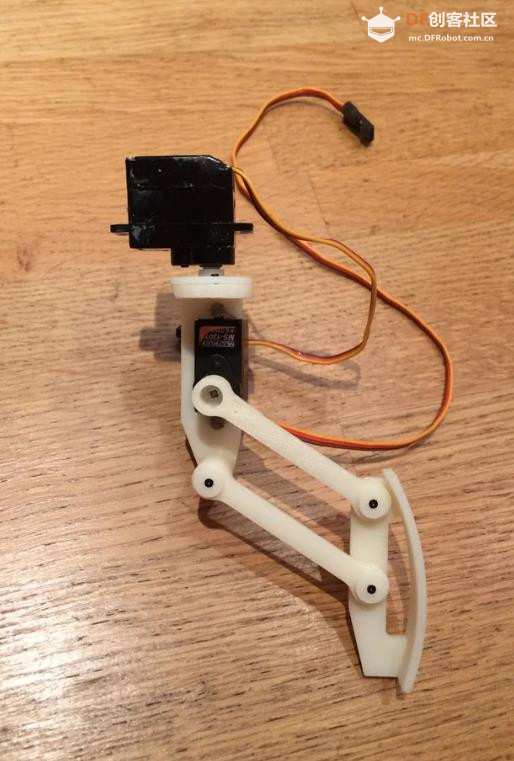 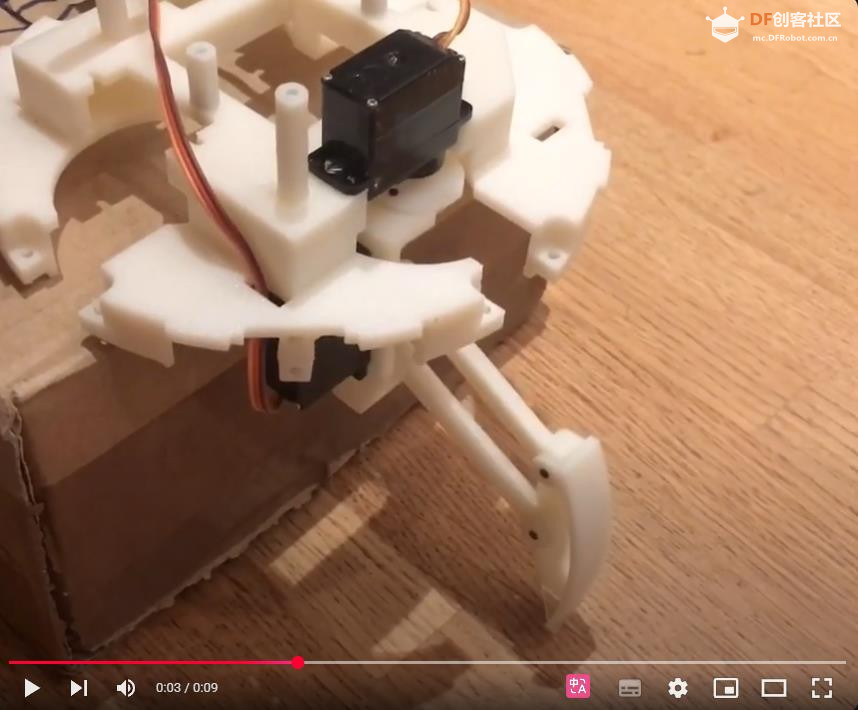 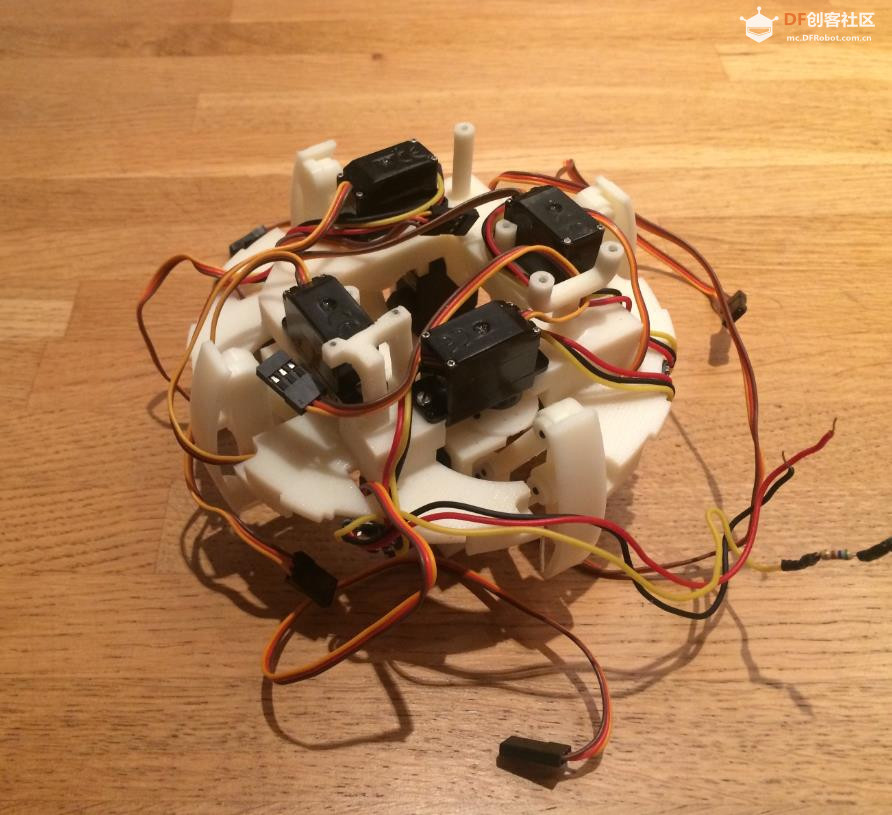 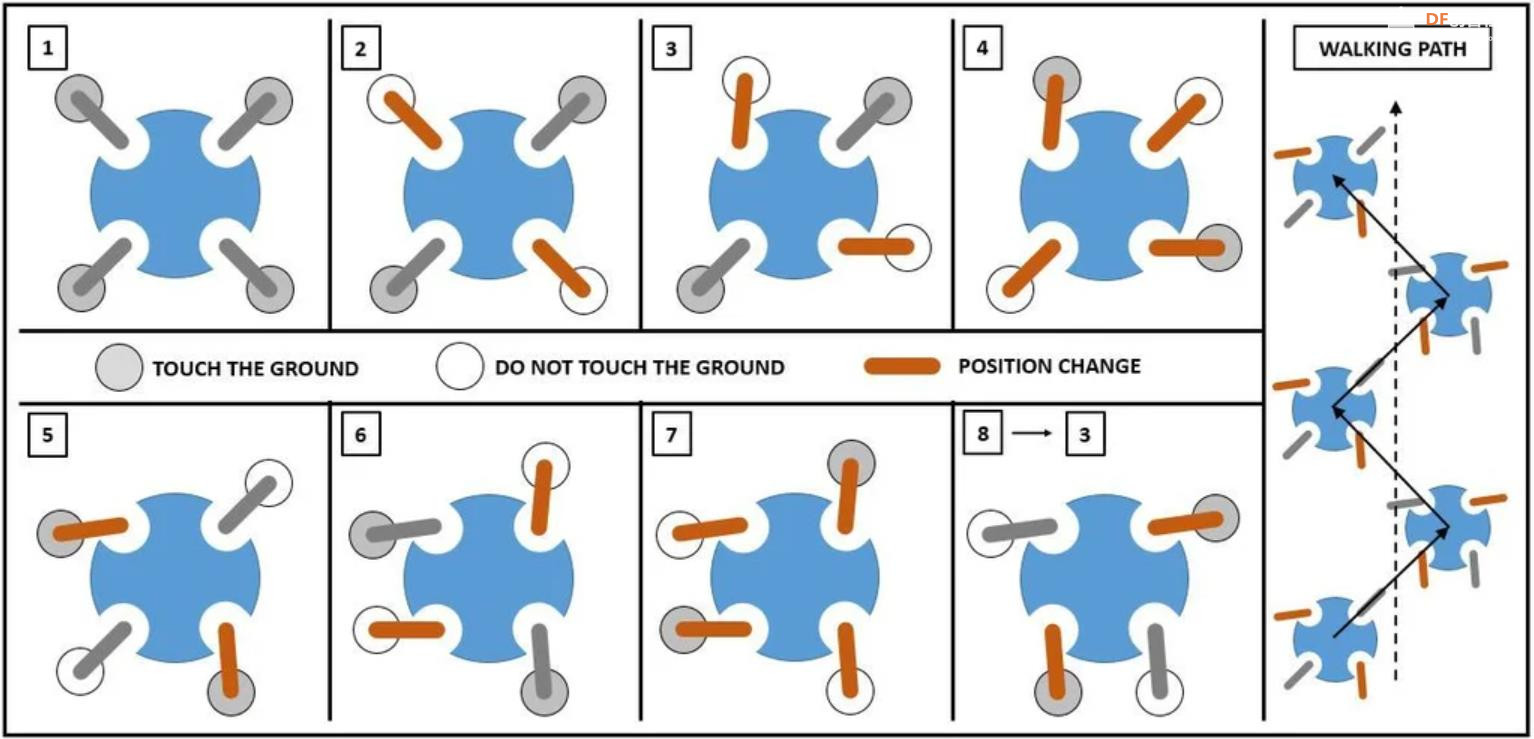 |
|
## 第 6 步:超声波传感器 介绍: 超声波传感器用于检查机器人前方是否有障碍物并避开障碍物。 该传感器还用作启动和停止机器人的开关。 描述: 障碍物检测 传感器发出超声波,该超声波在空气中传播,如果信号遇到障碍物,则反弹回传感器。传感器提供信号的传播时间。使用信号速度(已知值)可以计算到障碍物的距离。 如果检测到障碍物,机器人会停下来,将头转向右侧以测量自由距离,然后在左侧重复测量。机器人向自由距离最大的一侧旋转。 您可以在下图中找到旋转的机器人腿策略,同样,这只是众多可能性中的一种。 这个 Instructable 没有详细说明超声波传感器的作,互联网上已经有很多细节。 SRF05 超声波传感器教程 开关 为了保持球形外观,机器人上没有物理开关,因此使用了超声波传感器。如果检测到传感器前方非常近的障碍物,机器人将启动或停止。 超声波传感器不会对机器人进行电气关闭。要关闭电源,您需要提起盖子(头部)并断开电池。  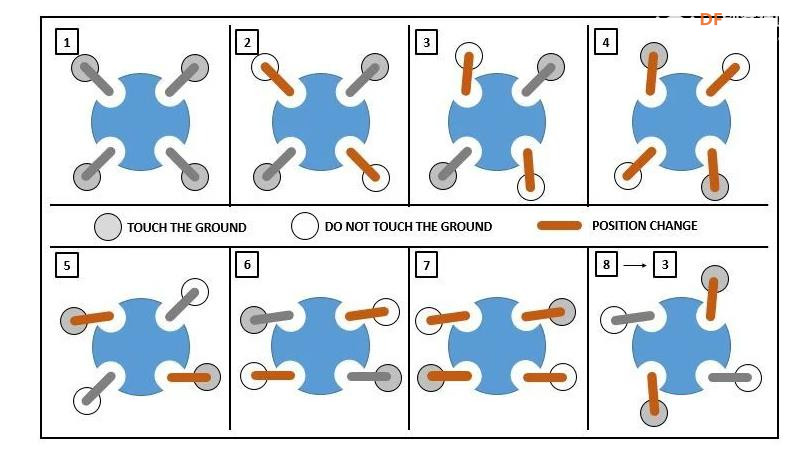 |
|
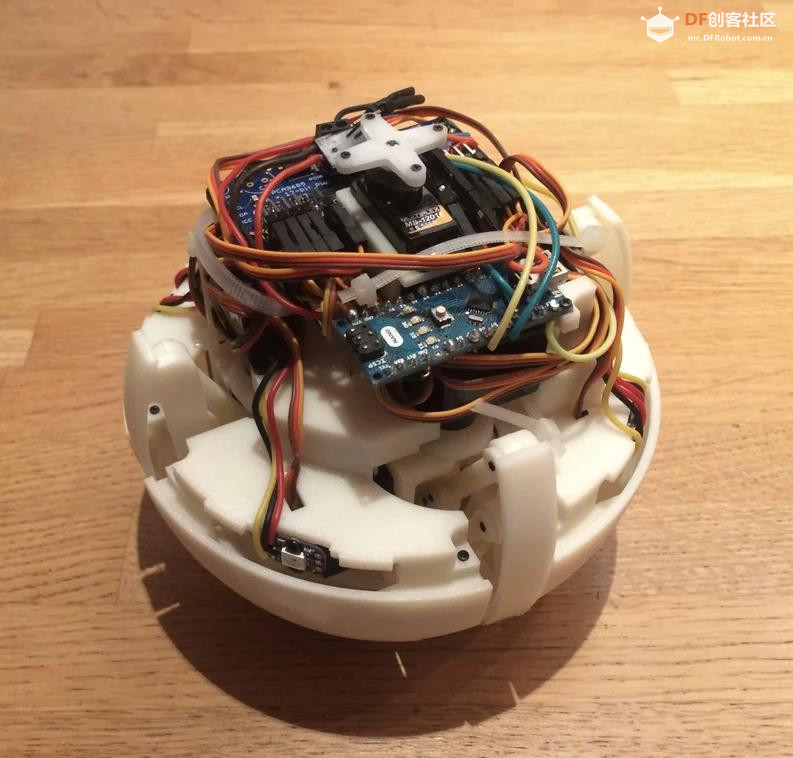
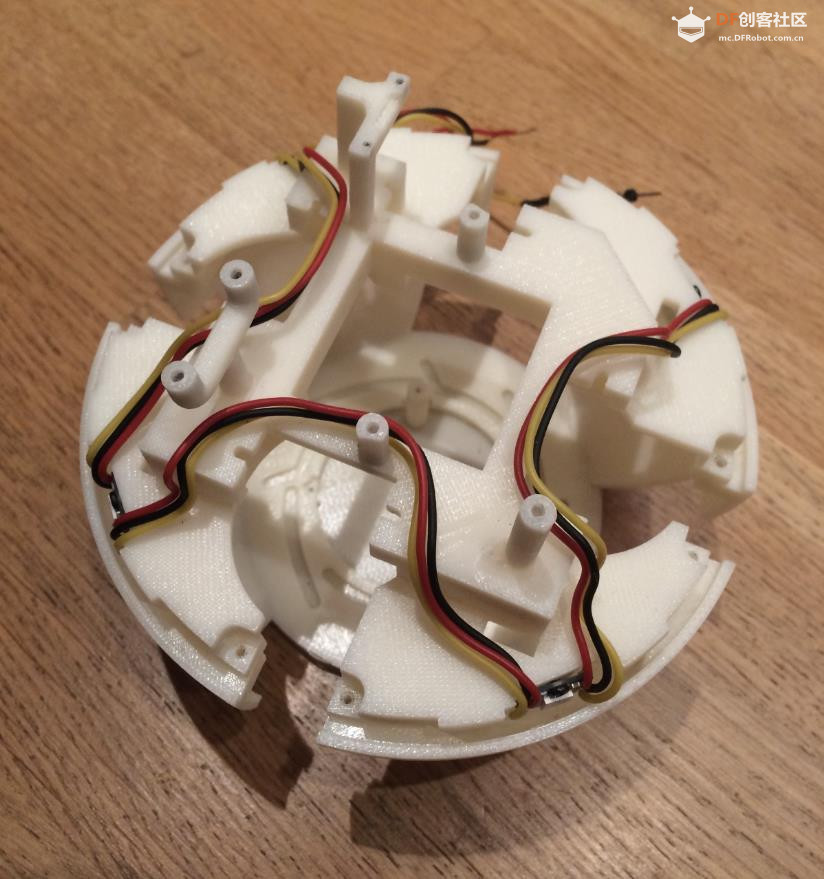
## 第 7 步:组装 没有复杂,没有陷阱。图片不言自明。 次要评论 : 不要忘记给腿部伺服电机电缆一些松弛,伺服电机必须能够自由移动。超声波传感器电缆也是如此。 增加了一些电缆夹,以确保所有电缆都锁定在机器人的中央结构上,并且不会干扰运动。 直角公接头与伺服电机驱动板一起使用。垂直方向没有足够的可用空间,因此连接方向为水平方向。 对于腿部关节,功能间隙为轴向 0.1 毫米和径向 0.1 毫米。您可以直接使用 FDM 3D 打印机获取这些值。您可能需要根据自己的 3D 打印机性能/精度来更新它们。 结构件通过自攻螺钉组装在一起。 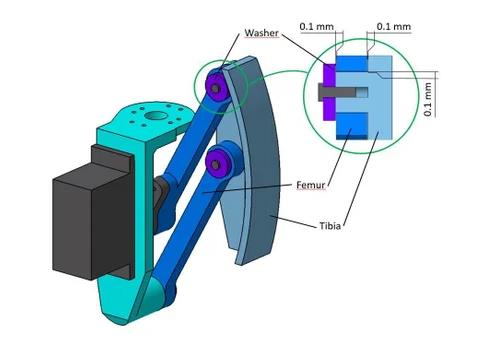 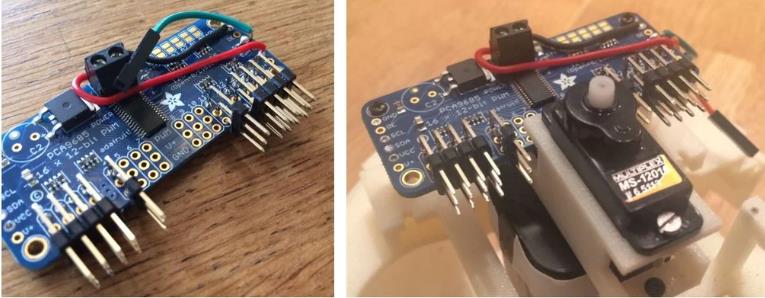 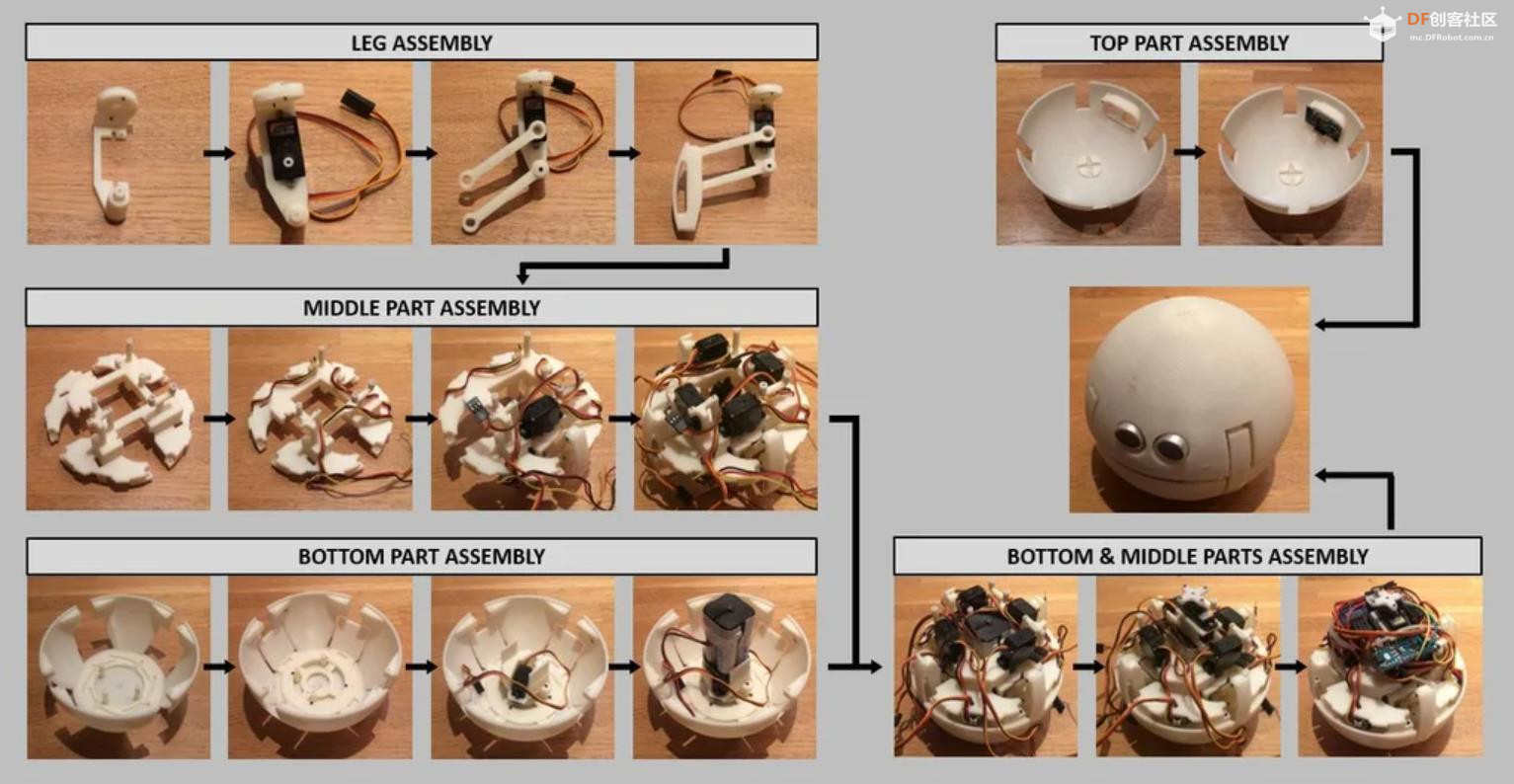 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶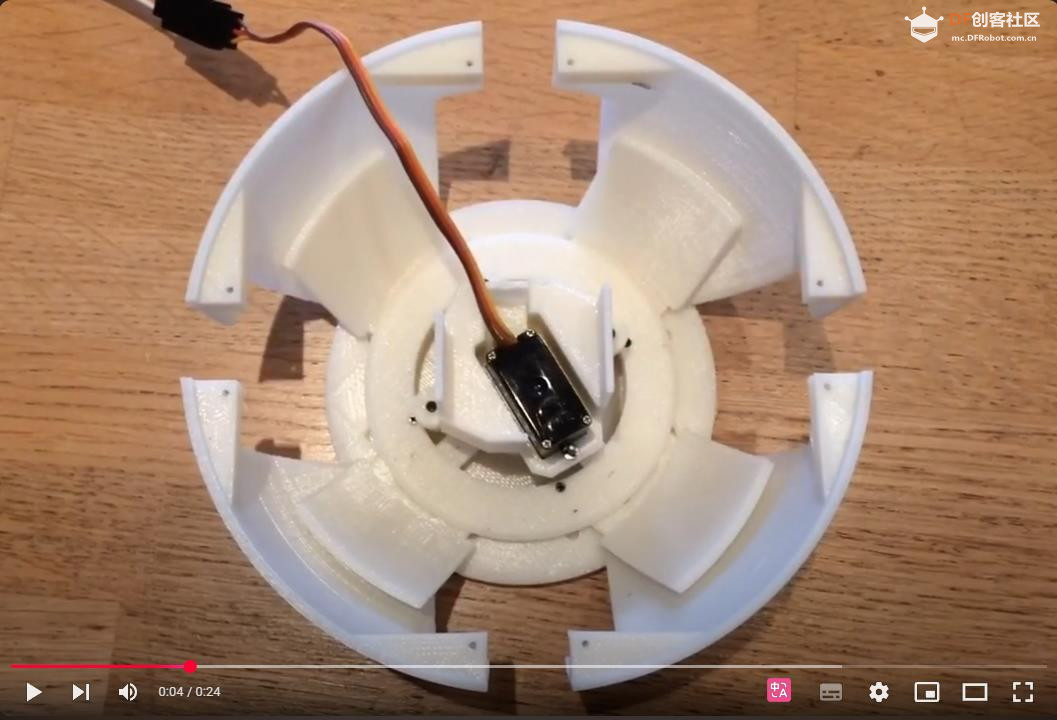





 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






