|
1533| 8
|
[项目] 【Arduino 动手做】Arduino Nano 四足机器人 |
|
我叫 Jaylan,我为 Berbawy 女士的工程原理课制作了这个项目。由于只在一周中的某些日子里工作,因此花了大约 6 个月的时间才完成。这个 Instructable 将介绍我创建 Arduino Quadruped 的构建过程。 我在 Hackspace 杂志上看到一张 Minikame 四足动物的照片后,就想构建这个项目。我还在 Instructables 上看到了许多其他创作,比如 Technovation 创建的 QUATTRO 和 Ijunqian 的 3D 打印四足动物。在整个过程中,我引用了这些网站来帮助我从头开始构建我的 8 DOF 四足机器人。 特别感谢我们的 POE 老师 Berbawy 女士! 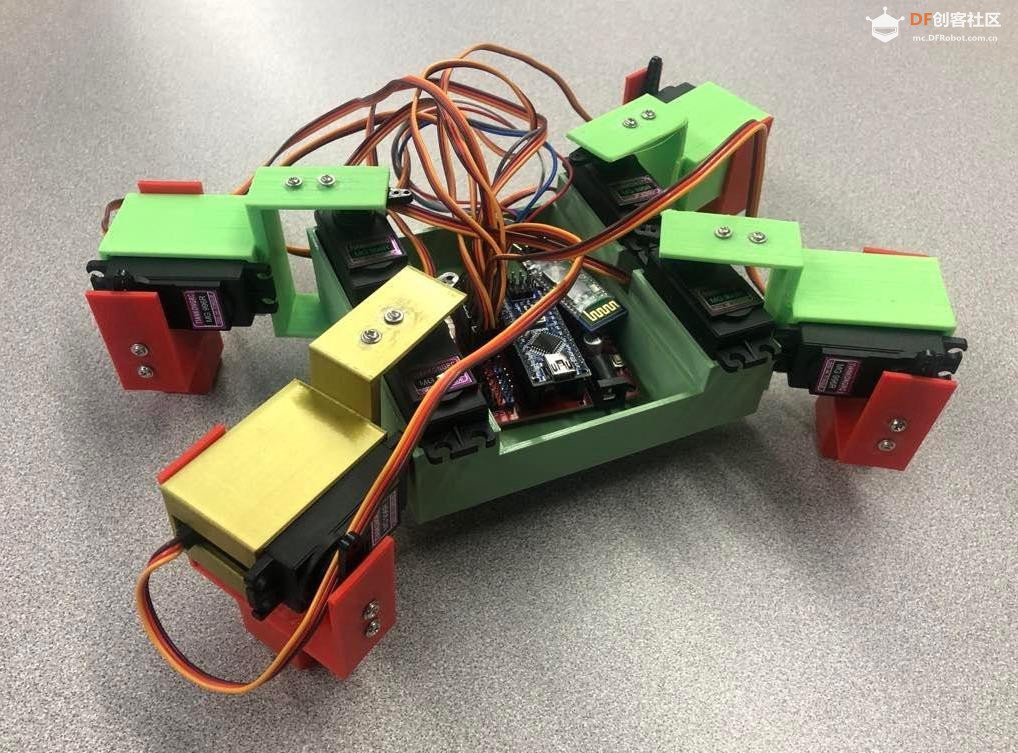 |
|
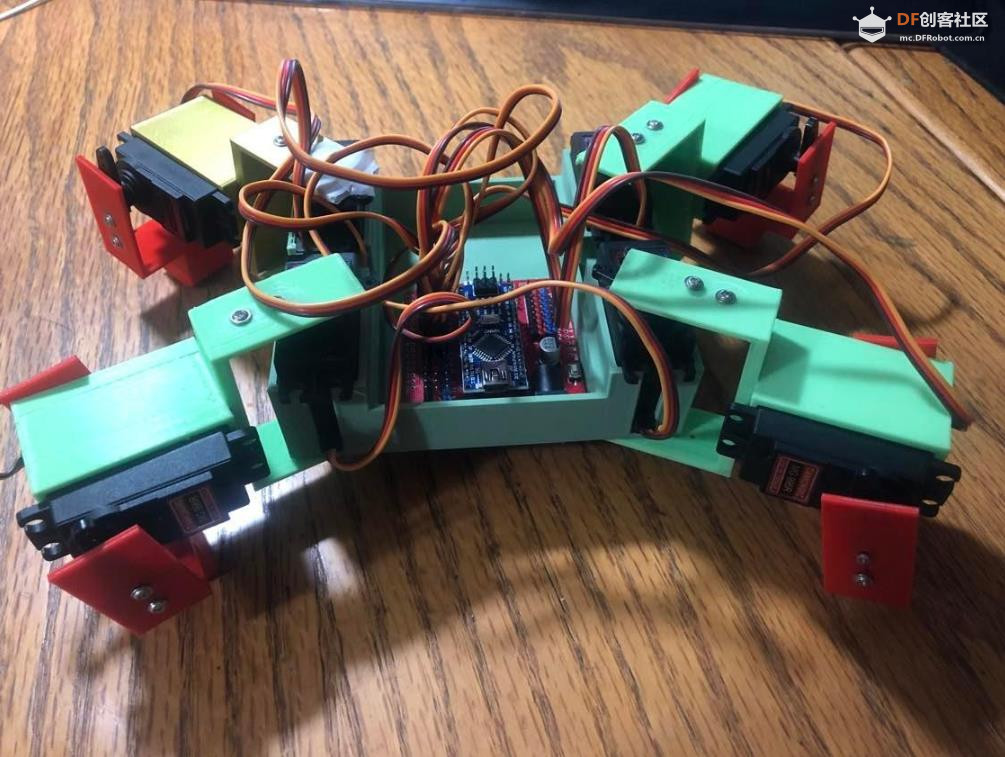
## 第 1 步:创建身体和腿部 机身是 3D 打印的,由 PETG 长丝制成,比 PLA 更坚固、更灵活。机身装有 Arduino Nano、Arduino Nano 扩展板,并且在放置伺服电机的侧面也有 4 个插槽。 四足动物的腿也包含两个独立的部分,一个是髋关节,一个是腿的脚。每个髋关节都包含一个额外的伺服器来移动整条腿,主体上的伺服器前后移动腿,而腿关节上的伺服器上下移动脚。 四足动物的腿由 PLA 制成。我打印了 1 个身体、4 个髋部伺服器和 4 个脚块。   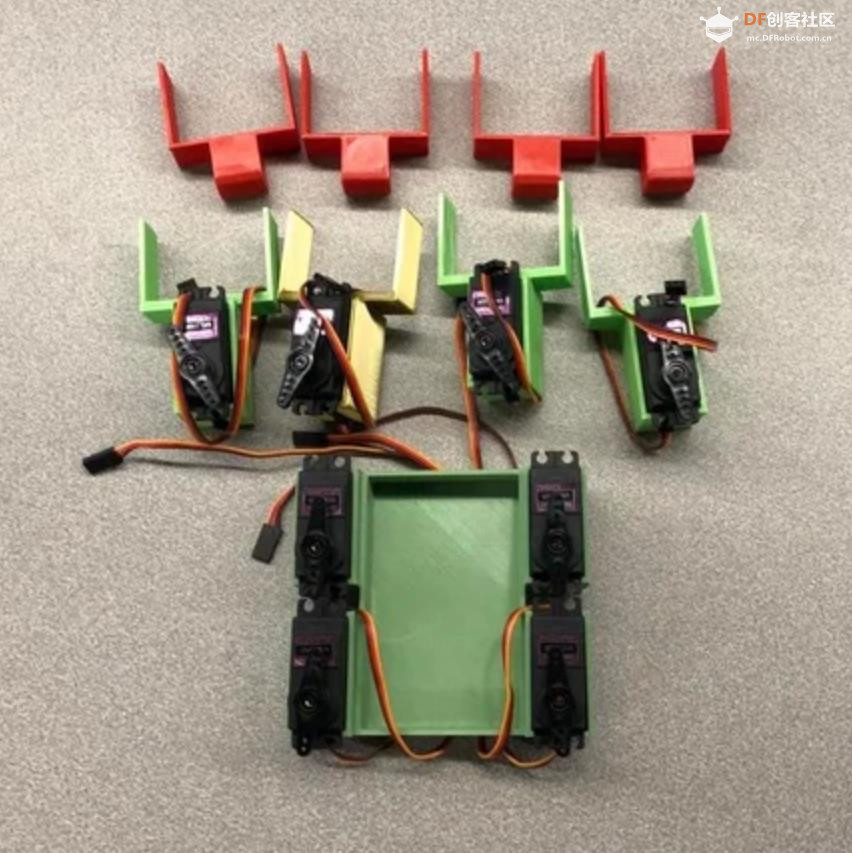 |
|
## 第 2 步:构建框架 为了将所有腿件连接在一起并连接到身体,我将伺服喇叭连接到每个臀部和脚部,以便它们可以轻松连接到伺服器。 但是,我没有创建用于将伺服喇叭连接到实际 3D 打印件上的螺丝孔,因此我不得不手动在臀部和脚部部件上钻孔,如果可以的话,我不建议这样做:)。我使用普通的电钻,并使用 1/16 英寸的钻头在工件上钻孔。 然后,我使用来自 sg90 电机包装的 M3 螺钉将伺服喇叭拧到零件上。我可以使用这些螺丝,因为我班上有额外的东西。螺钉在钻孔中进行了紧密的战斗,因此它能够将伺服喇叭固定到位。 完成钻孔后,我将所有伺服器安装到插槽中,并将各个部分连接在一起以构建整个身体的框架。 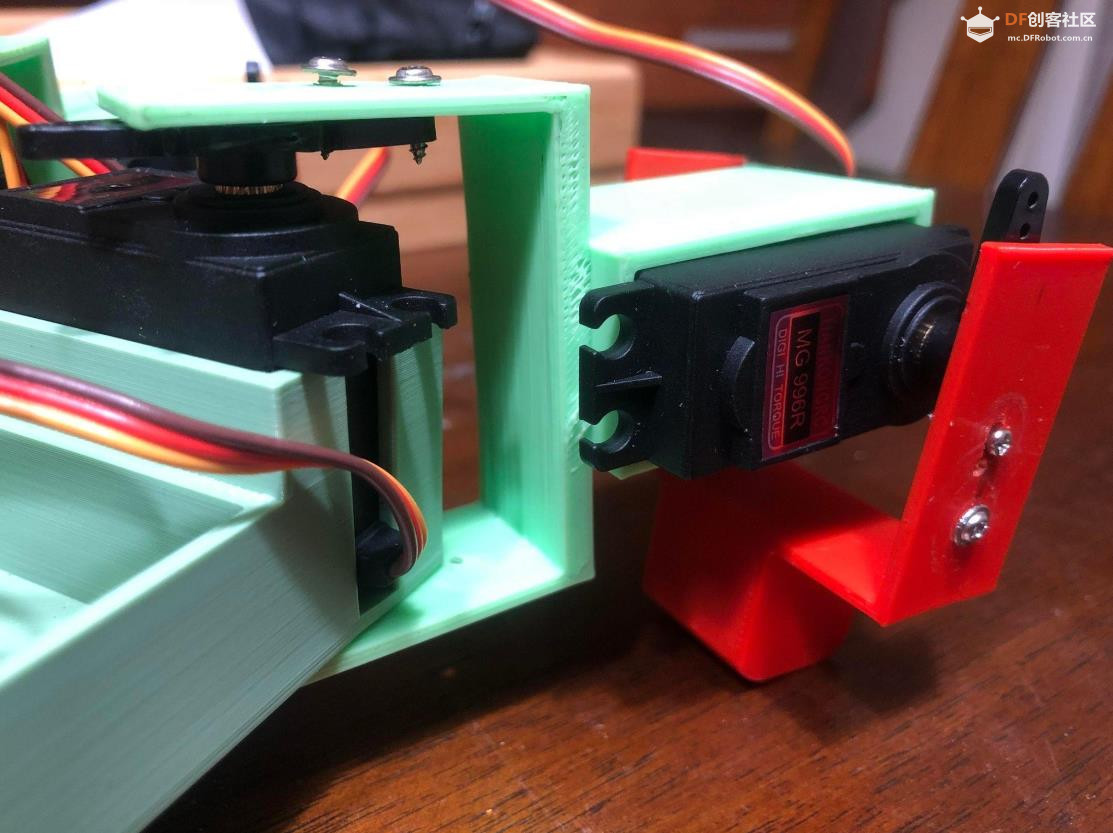 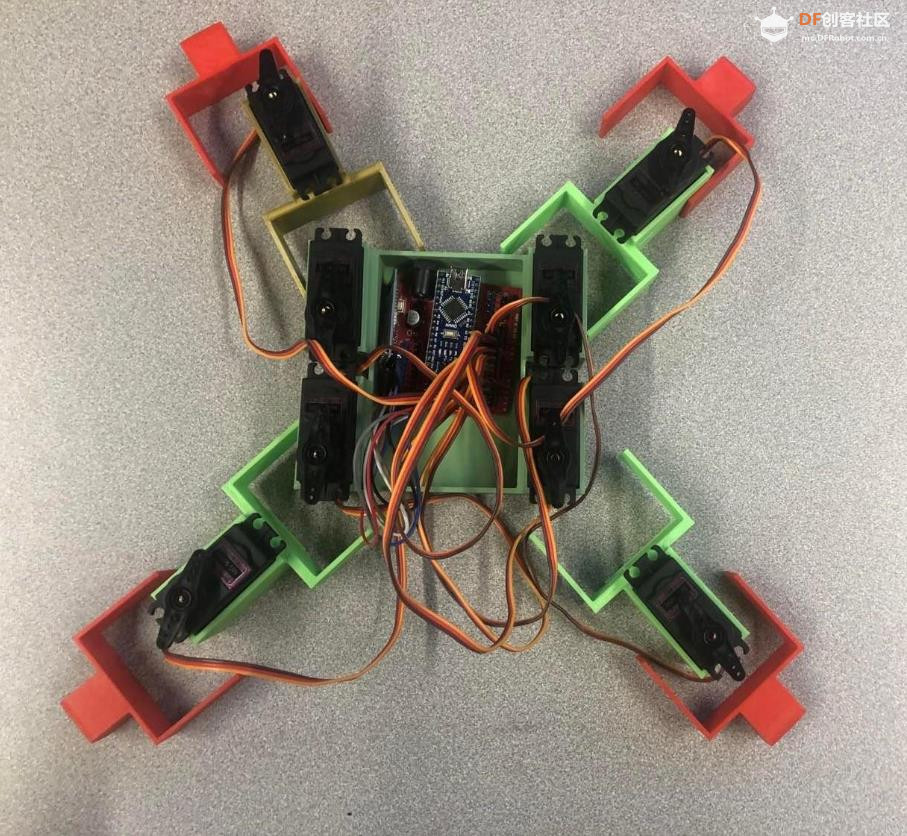 |
|
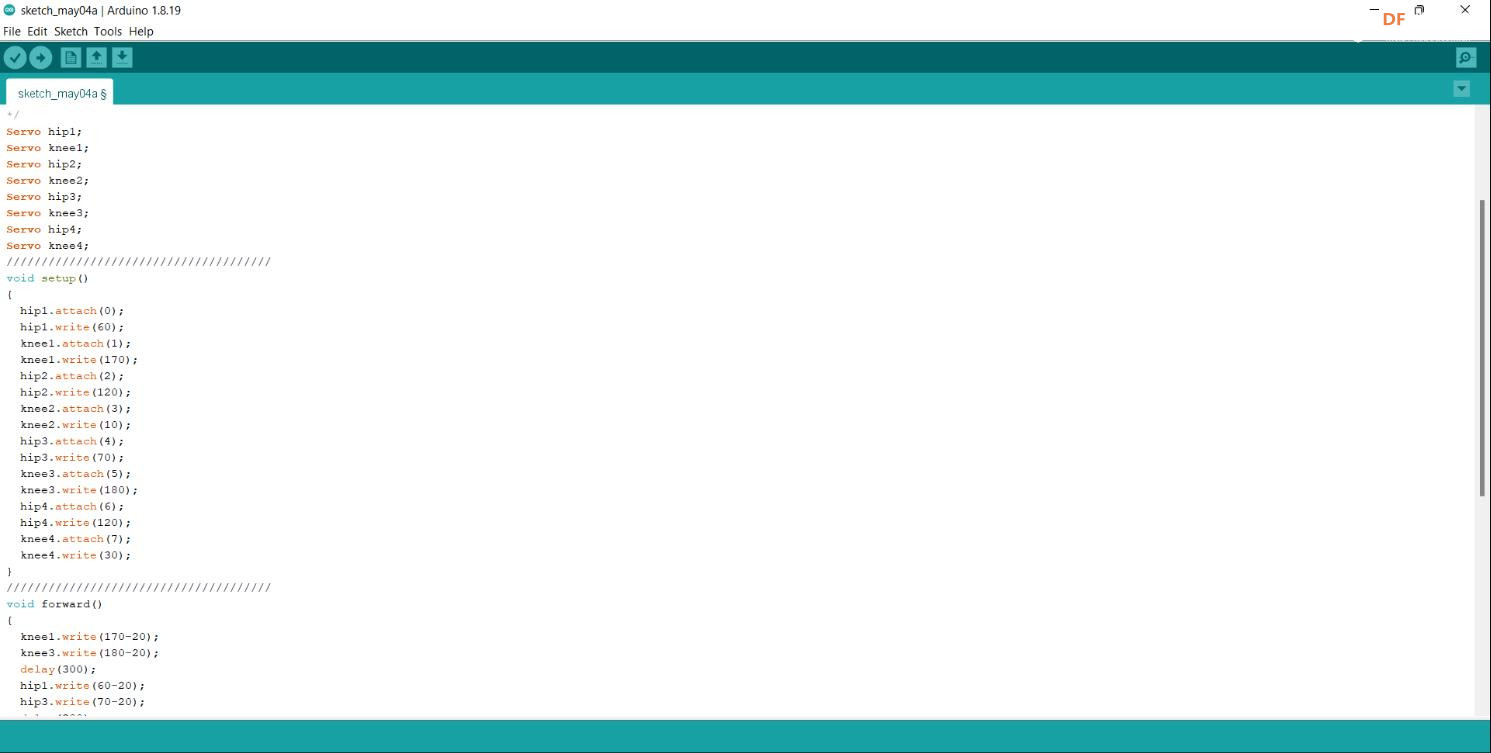
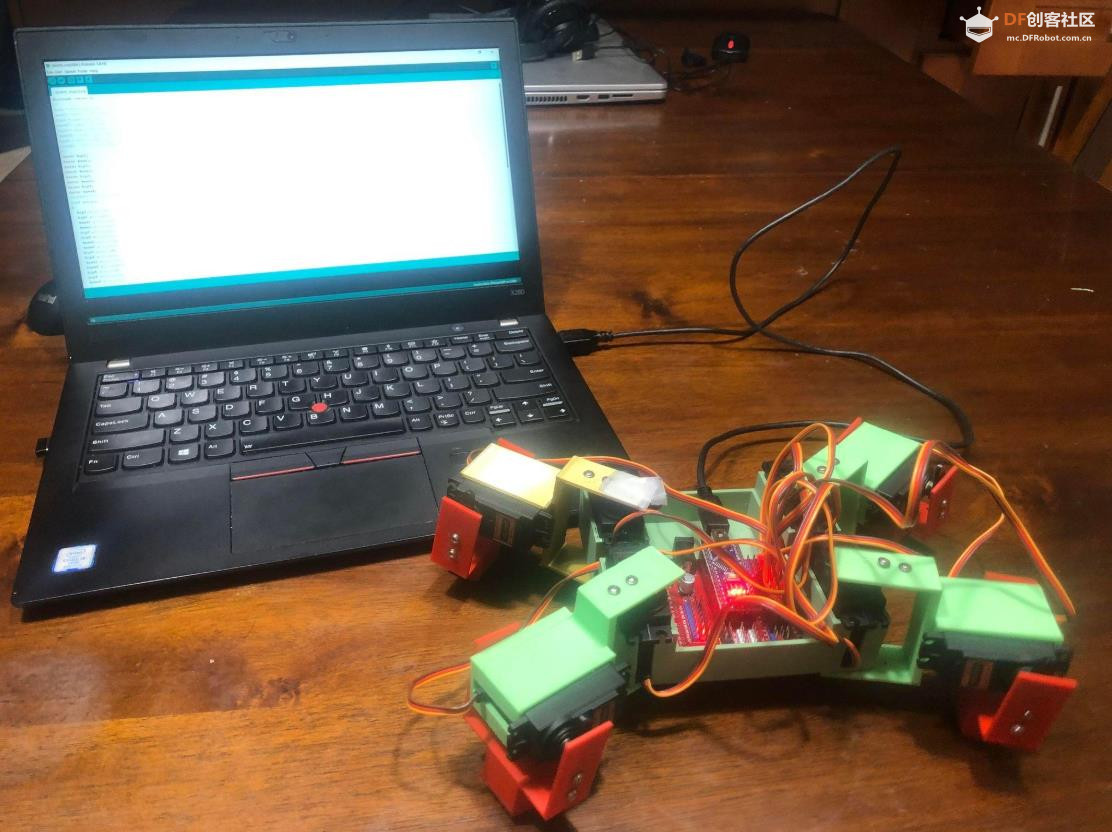
## 第 3 步:项目电路 该过程的下一步是将所有伺服线移动到所需的位置,以便每个电机都可以由将安装在 Arduino Nano 中的代码控制。舵机的电线都连接到 Expansion shield。 下面列出了每根电线的连接位置: D2 至右前舵机 D3 到右前臀部伺服器 D4 对后右体伺服器 D5 向后右髋部伺服器 D6 左后舵机 D7 向后左髋舵机 D8 至左前舵机 D9 至左前髋舵机 连接好舵机后,所有困难的硬件都完成了,唯一要做的就是上传编码,让四足机器人向前移动 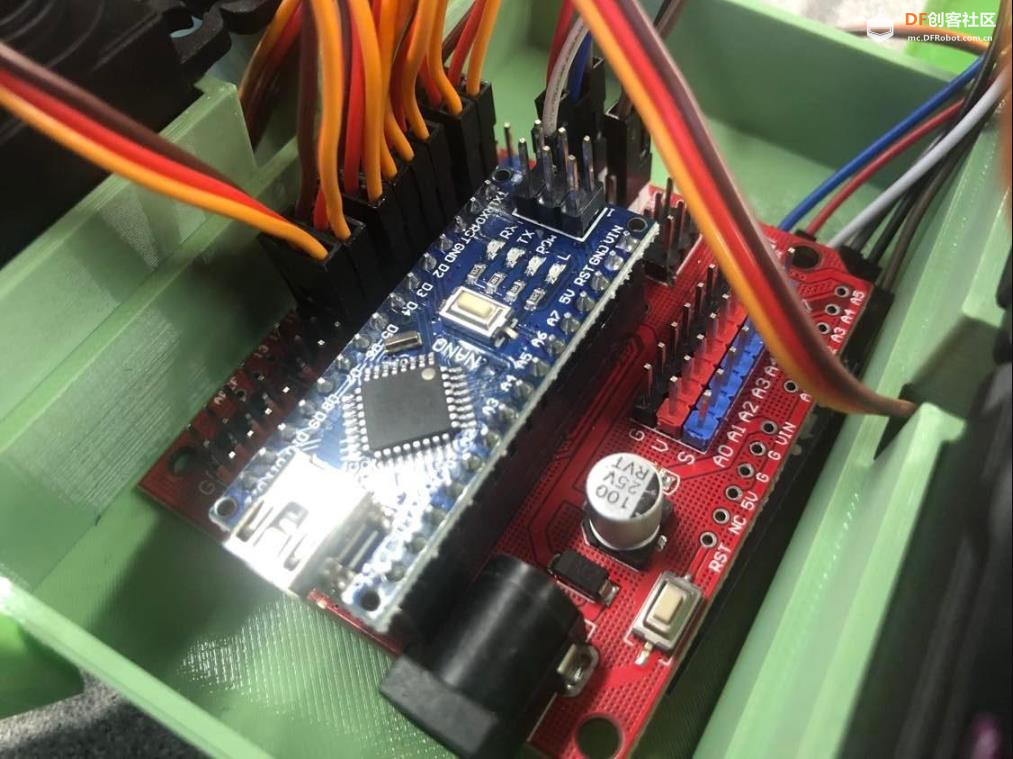 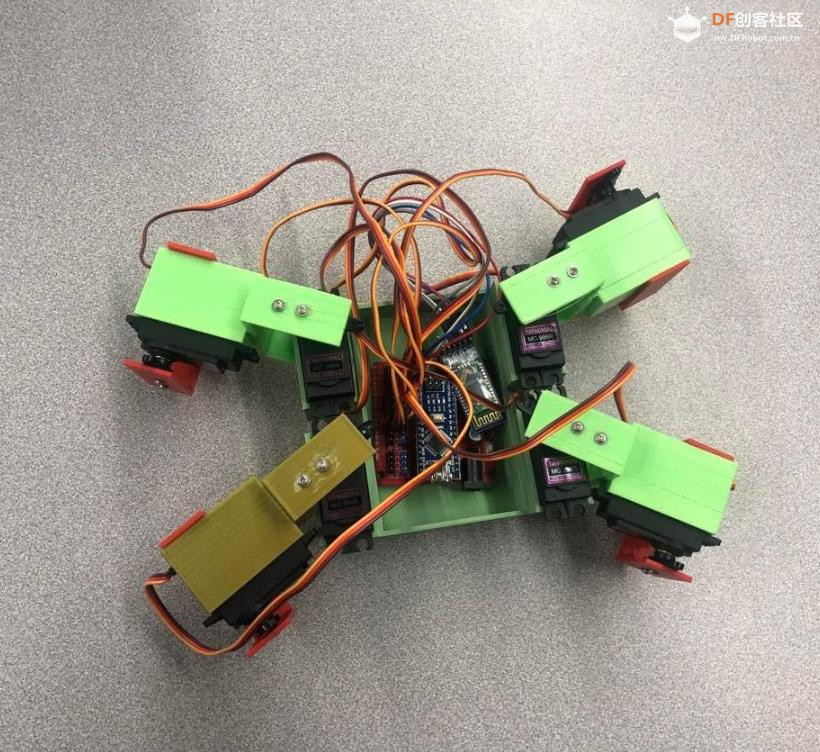 |
|
## 第 6 步:一路上的问题 在整个过程中有很多失败和重试。大多数错误发生在机器人编码和确定哪个伺服最适合哪个位置时。 在机器人代码的一次测试运行期间,用于重新调整伺服角度角度的代码输入导致其中一个髋部部件分裂并在中间产生一个小裂缝。 腿片也很薄,这使得机器人非常脆弱,让我一直担心它会因为机器人的重量而断裂。 后来出现的另一个问题是,由于身体的创建方式,伺服槽都朝一个方向倾斜,并阻碍了机器人两条腿的旋转。 最后,扩展盾上的两个端口不工作,因此两个舵机根本无法移动,这影响了机器人的运动。然而,机器人仍然能够向前移动,但速度非常缓慢。 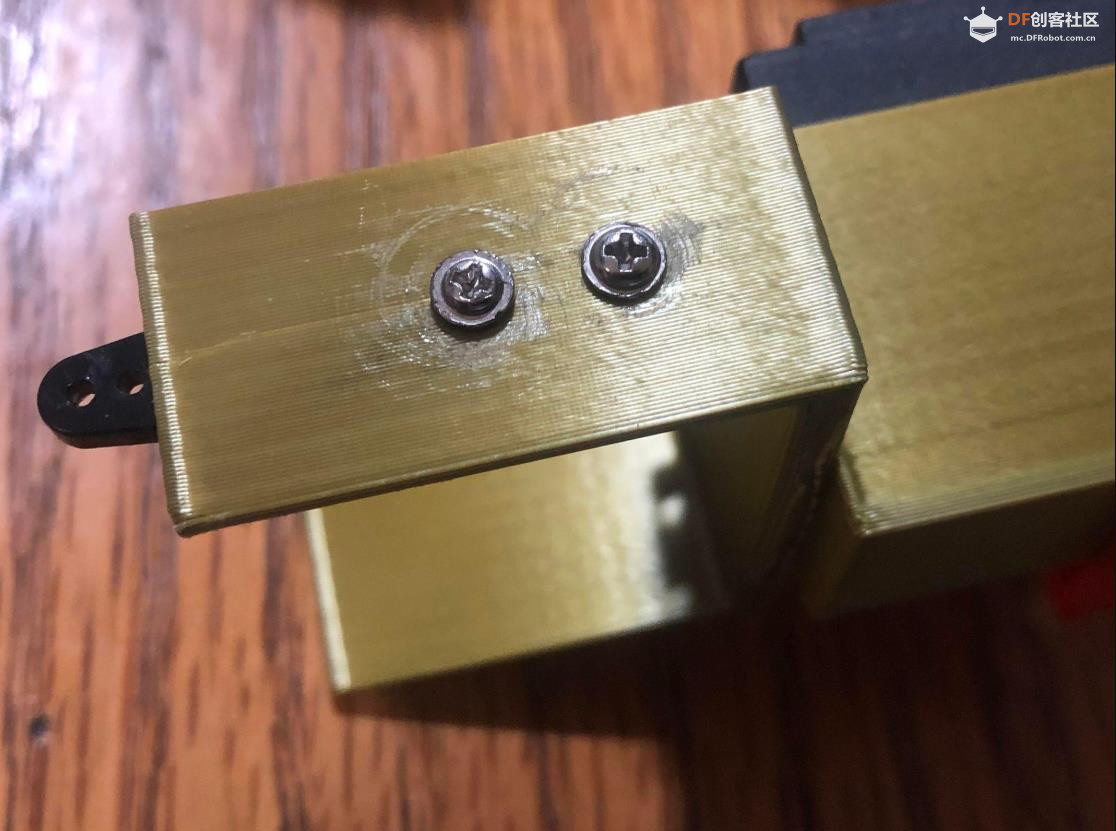  |
|
## 第 7 步:享受! 这就是我创建 Arduino Nano 四足机器人的方式。在这个项目的失败和成功中,我获得了很多经验。通过创建这个机器人,我终于能够掌握电子设备并了解我在整个项目中使用的每个组件。 我希望你喜欢这个 Instructable! 项目链接:https://www.instructables.com/Arduino-Nano-Quadruped-Robot/ 项目作者:Jaylan Mo 项目视频 :https://content.instructables.co ... 3X/F59HVH3L31SY63X. gif?format=mp4 项目代码:https://gist.github.com/ljunqian/6d3f5a4ec7d4fab077c56568e96ebe0d  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






