|
1106| 2
|
[项目] 【Arduino 动手做】使用 Arduino 和 MPU 6050 的云台支架 |
|
极客们,大家好,我们又回来了。我们确信您知道什么是万向节。好吧,专业摄影师使用它来录制电影镜头或高质量视频。所以在本文中,我们将在 MPU 6050 陀螺仪传感器和 Arduino UNO 项目的帮助下制作一个万向节支架。这个万向节支架可以向不同的方向旋转,对于这个运动,我们使用了两个伺服电机。由于我们在这个支架上使用了伺服电机,因此运动不如原来的平稳。原始支架中使用了一些特殊类型的 BLDC 电机。您还可以阅读有关 IoT 和 Basic electronics 的文章。因此,不要再浪费时间了,让我们开始吧。 云台支架 描述 陀螺仪传感器用于检测物体或机器的位置变化。 在我们的项目中,它用于使用伺服电机平衡万向节的顶角。 当我们移动或倾斜传感器时,它会根据移动的角度生成一些值。 如果您不熟悉 MPU 6050 陀螺仪传感器与 Arduino 的接口,请先了解一下。 当我们向左、向右、向前、向后移动传感器时,伺服电机会移动。 您可以使用纸板将伺服电机一个接一个地安装。 按照电路图中给出的正确连接,然后上传代码。 云台支架 mpu6050 云台所需的组件 Arduino UNO MPU 6050 陀螺仪传感器 伺服电机 跳线 面包板 用于上传代码的 USB 数据线 万向节支架组件 云台支架电路图 取两个伺服电机,将它们的正电源线与 Arduino 的 5 伏引脚连接。 将它们的负电源线与 Arduino 的 GND 引脚连接起来。 然后将 MPU 6050 陀螺仪传感器的 VCC 和 GND 引脚与 Arduino 的 5 伏和 GND 引脚连接。 将传感器的 SCL 和 SDA 引脚与 Arduino 的 SCL (Analog-5) 和 SDA (Analog-4) 引脚连接。 将传感器的 INT 引脚与 Arduino 的数字 2 引脚连接起来。 最后,将第一个伺服电机的信号线与 Arduino 的数字 6 引脚连接,将第二个伺服电机的信号线与 Arduino 的数字 5 引脚连接。您的电路现在已经完成。 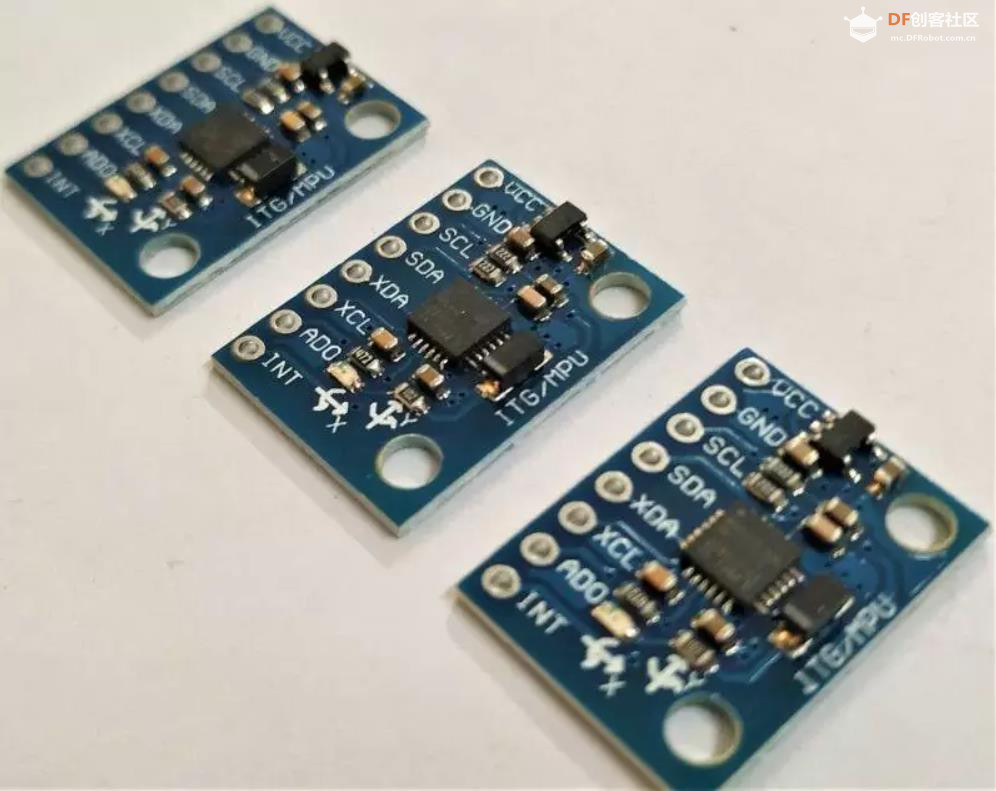 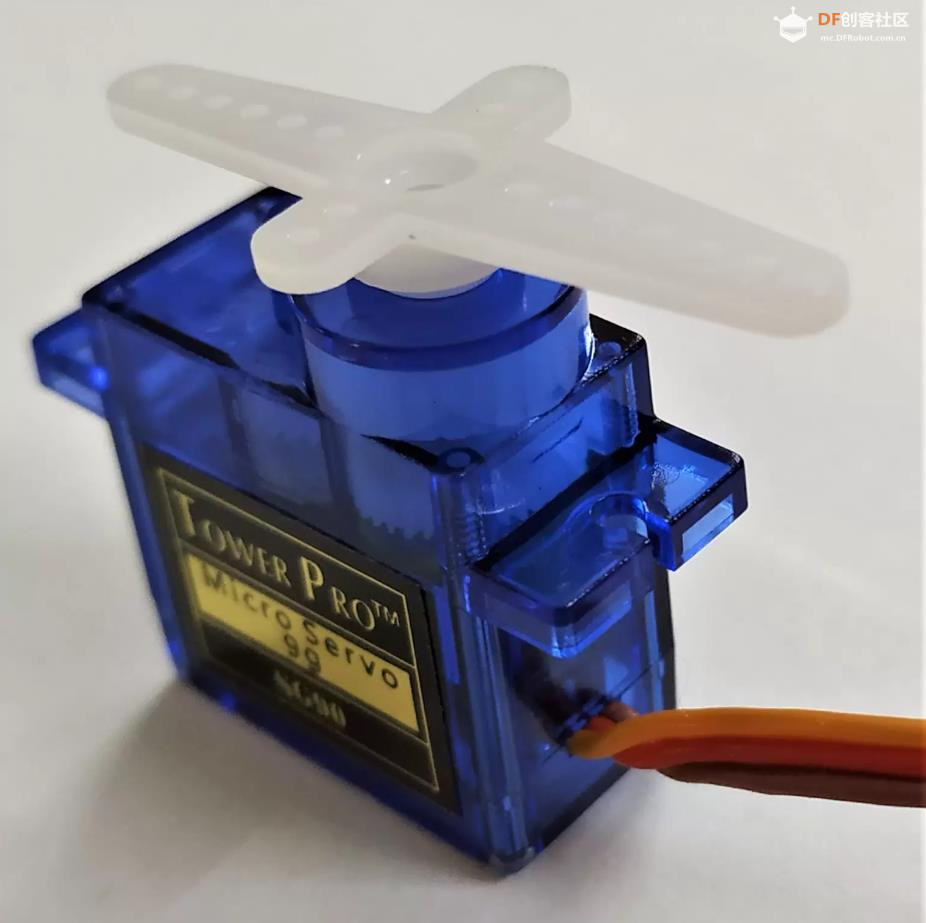 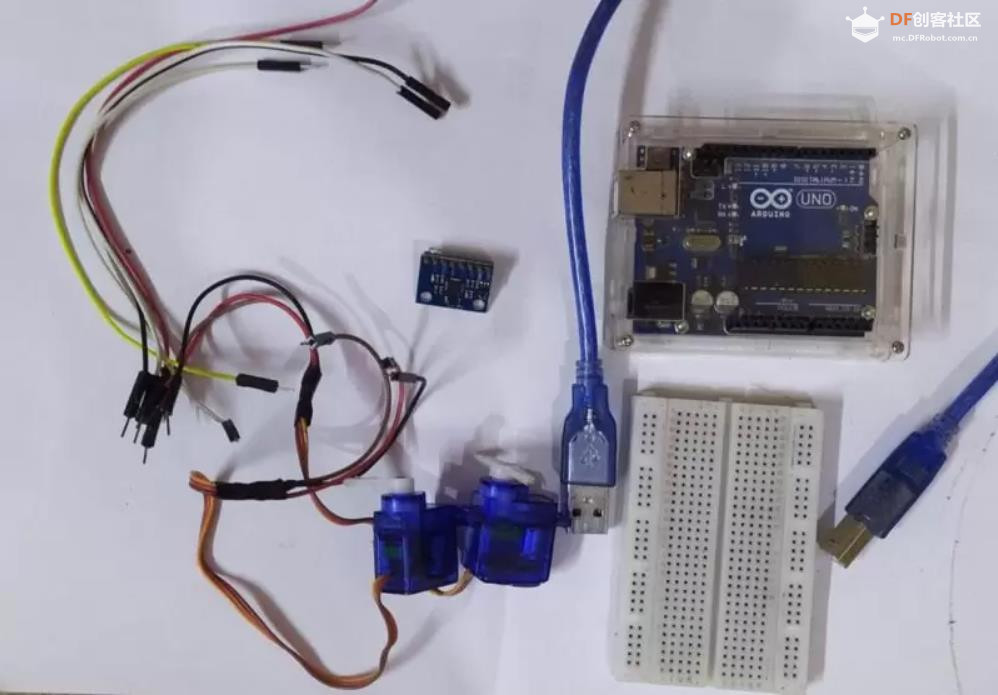 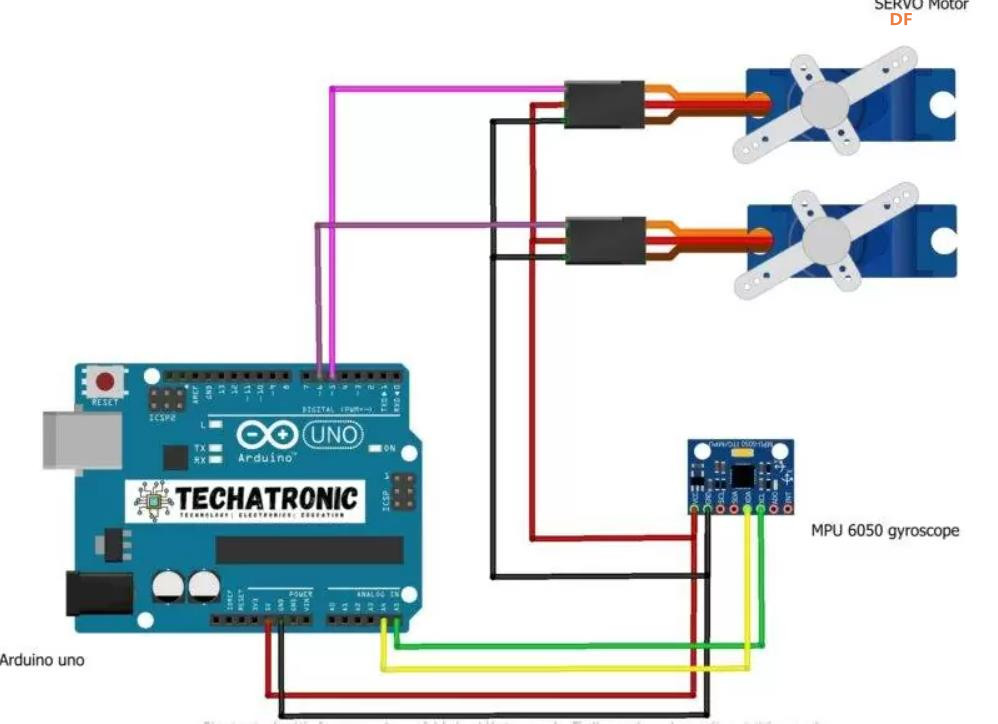 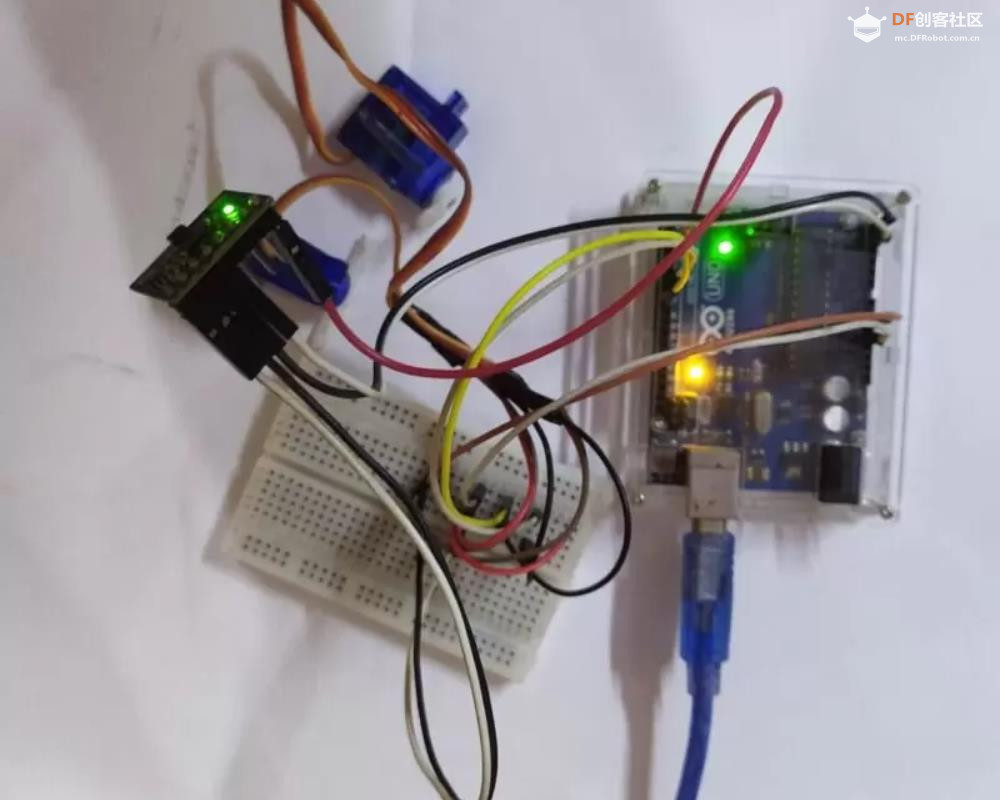 |
项目代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶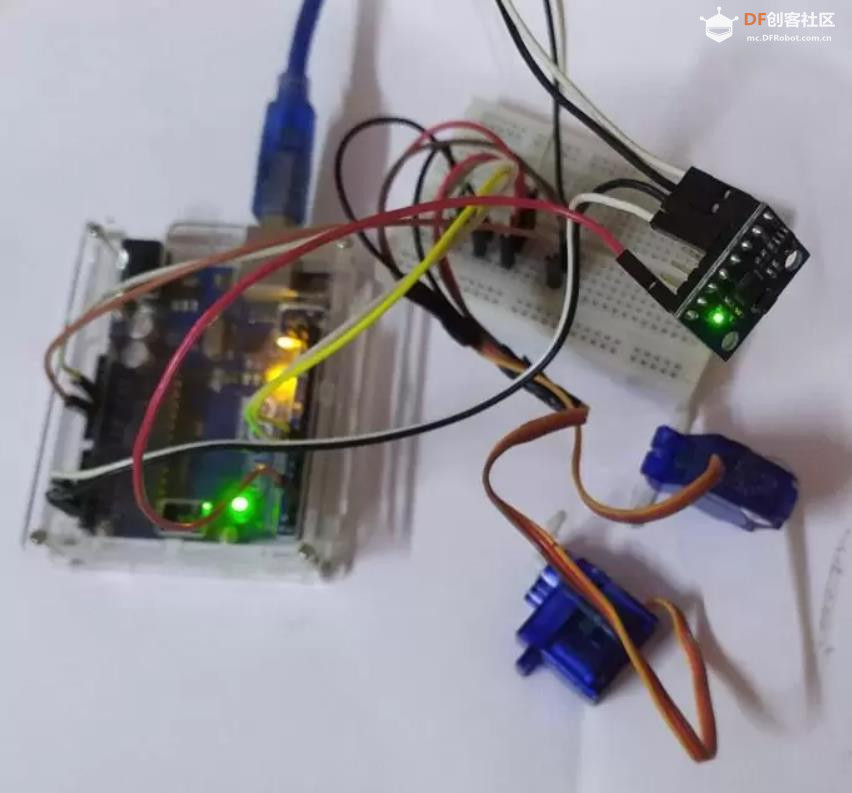

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






