项目代码
-
- /*
- * Original sourse: https://github.com/adafruit/Adafruit-PWM-Servo-Driver-Library
- *
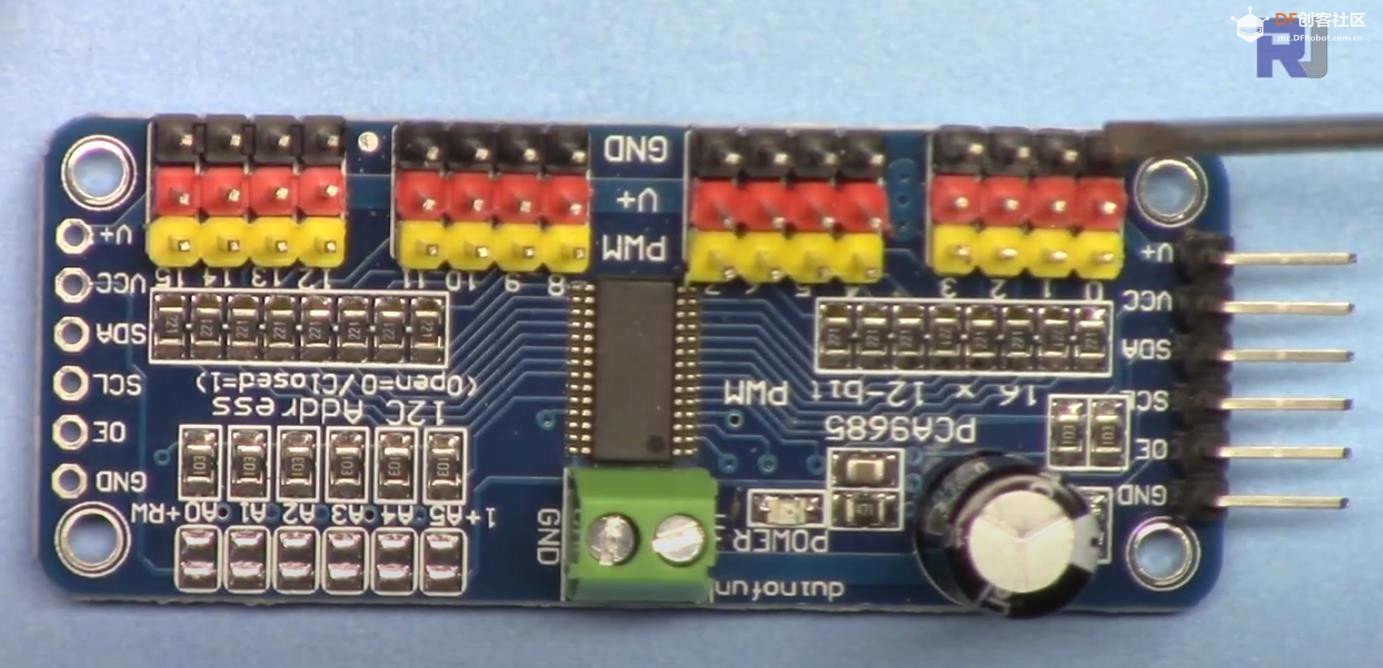
- * This is the Arduino code PAC6985 16 channel servo controller
- * watch the video for details (V1) and demo http://youtu.be/y8X9X10Tn1k
- * This code is #1 for V2 Video Watch the video :https://youtu.be/bal2STaoQ1M
- * I have got 3 codes as follow:
- #1-Arduino Code to run one by one all servos from 0 to 180�
- #2-Arduino Code to control specific servos with specific angle
- #3-Arduino Code to run 2 or all servos at together
-
- * Written/updated by Ahmad Shamshiri for Robojax Video channel www.Robojax.com
- * Date: Dec 16, 2017, in Ajax, Ontario, Canada
-
- * Watch video for this code:
- *
- * Related Videos
- V5 video of PCA9685 32 Servo with ESP32 with WiFi https://youtu.be/bvqfv-FrrLM
- V4 video of PCA9685 32 Servo with ESP32 (no WiFi): https://youtu.be/JFdXB8Za5Os
- V3 video of PCA9685 how to control 32 Servo motors https://youtu.be/6P21wG7N6t4
- V2 Video of PCA9685 3 different ways to control Servo motors: https://youtu.be/bal2STaoQ1M
- V1 Video introduction to PCA9685 to control 16 Servo https://youtu.be/y8X9X10Tn1k
-
- * Disclaimer: this code is "AS IS" and for educational purpose only.
- * this code has been downloaded from http://robojax.com/learn/arduino/
-
- * Get this code and other Arduino codes from Robojax.com
- Learn Arduino step by step in structured course with all material, wiring diagram and library
- all in once place. Purchase My course on Udemy.com http://robojax.com/L/?id=62
-
- ****************************
- Get early access to my videos via Patreon and have your name mentioned at end of very
- videos I publish on YouTube here: http://robojax.com/L/?id=63 (watch until end of this video to list of my Patrons)
- ****************************
-
- or make donation using PayPal http://robojax.com/L/?id=64
-
- * * This code is "AS IS" without warranty or liability. Free to be used as long as you keep this note intact.*
- * This code has been download from Robojax.com
- This program is free software: you can redistribute it and/or modify
- it under the terms of the GNU General Public License as published by
- the Free Software Foundation, either version 3 of the License, or
- (at your option) any later version.
-
- This program is distributed in the hope that it will be useful,
- but WITHOUT ANY WARRANTY; without even the implied warranty of
- MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
- GNU General Public License for more details.
-
- You should have received a copy of the GNU General Public License
- along with this program. If not, see <https://www.gnu.org/licenses/>.
- */
-
- /***************************************************
- This is an example for our Adafruit 16-channel PWM & Servo driver
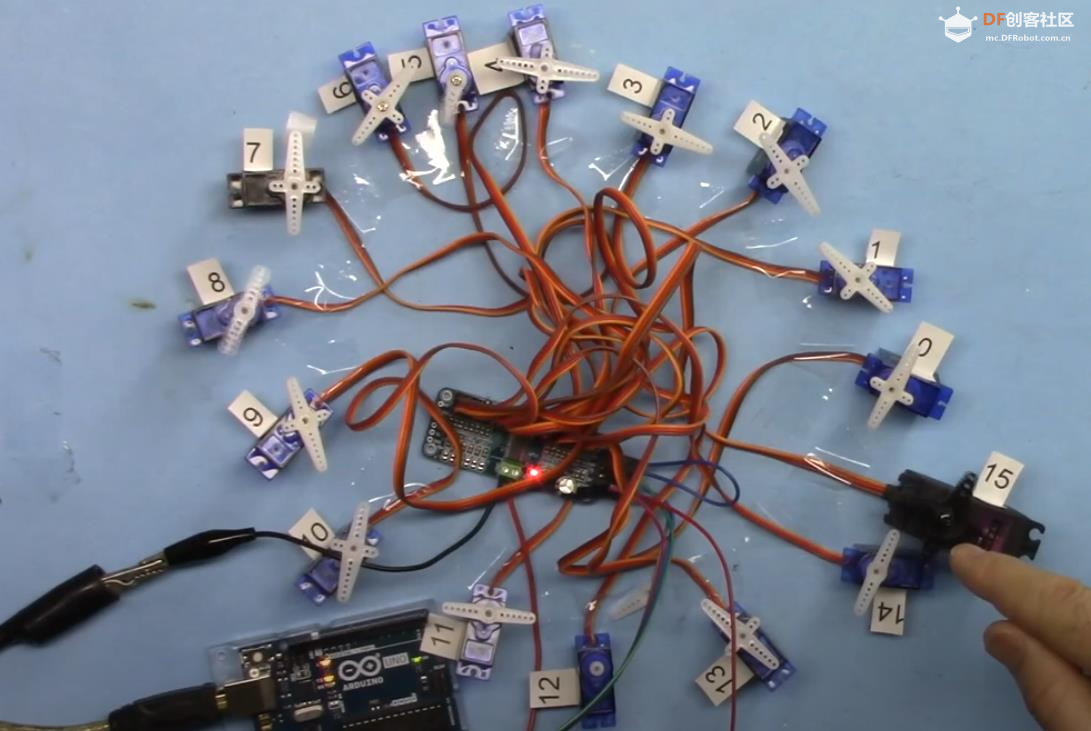
- Servo test - this will drive 16 servos, one after the other
-
- Pick one up today in the adafruit shop!
- ------> http://www.adafruit.com/products/815
-
- These displays use I2C to communicate, 2 pins are required to
- interface. For Arduino UNOs, thats SCL -> Analog 5, SDA -> Analog 4
-
- Adafruit invests time and resources providing this open source code,
- please support Adafruit and open-source hardware by purchasing
- products from Adafruit!
-
- Written by Limor Fried/Ladyada for Adafruit Industries.
- BSD license, all text above must be included in any redistribution
- ****************************************************/
-
- #include <Wire.h>
- #include <Adafruit_PWMServoDriver.h>
-
- // called this way, it uses the default address 0x40
- Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
- // you can also call it with a different address you want
- //Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x41);
-
- // Depending on your servo make, the pulse width min and max may vary, you
- // want these to be as small/large as possible without hitting the hard stop
- // for max range. You'll have to tweak them as necessary to match the servos you
- // have!
- // Watch video V1 to understand the two lines below: http://youtu.be/y8X9X10Tn1k
- #define SERVOMIN 125 // this is the 'minimum' pulse length count (out of 4096)
- #define SERVOMAX 575 // this is the 'maximum' pulse length count (out of 4096)
-
- // our servo # counter
- uint8_t servonum = 0;
-
- void setup() {
- Serial.begin(9600);
- Serial.println("16 channel Servo test!");
-
- pwm.begin();
-
- pwm.setPWMFreq(60); // Analog servos run at ~60 Hz updates
-
- //yield();
- }
-
- // the code inside loop() has been updated by Robojax
- void loop() {
-
- //watch video for details: https://youtu.be/bal2STaoQ1M
- for(int i=0; i<16; i++)
- {
- for( int angle =0; angle<181; angle +=10){
- delay(50);
- pwm.setPWM(i, 0, angleToPulse(angle) );
- // see YouTube video for details (robojax)
-
- }
-
- }
-
- // robojax PCA9865 16 channel Servo control
- delay(1000);// wait for 1 second
-
- }
-
- /*
- /* angleToPulse(int ang)
- * @brief gets angle in degree and returns the pulse width
- * @param "ang" is integer represending angle from 0 to 180
- * @return returns integer pulse width
- * Usage to use 65 degree: angleToPulse(65);
- * Written by Ahmad Shamshiri on Sep 17, 2019.
- * in Ajax, Ontario, Canada
- * www.Robojax.com
- */
-
- int angleToPulse(int ang){
- int pulse = map(ang,0, 180, SERVOMIN,SERVOMAX);// map angle of 0 to 180 to Servo min and Servo max
- Serial.print("Angle: ");Serial.print(ang);
- Serial.print(" pulse: ");Serial.println(pulse);
- return pulse;
- }
| 




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






