|
1269| 1
|
[项目] 【Arduino 动手做】SCARA 机器人:学习正向和逆向运动学 |
|
SCARA 机器人是工业界非常流行的机器。该名称代表 Selective Compliant Assembly Robot Arm 或 Selective Compliant Articulated Robot Arm。它基本上是一个三自由度机器人,是 XY 平面中的前两个位移旋转位移,最后一个运动由手臂末端 Z 轴上的滑块执行。两个自由度旨在提供更高精度;尽管如此,由于可供我们使用的伺服系统的质量,由于它有两个自由度,构建的手臂并没有像人们预期的那样具有那么多的机动性。电子部分易于理解。不过,构建起来很困难。由于手臂需要三个执行器,因此我们有三个通道。我们决定使用 Processing,而不是使用常见的 Arduino 接口进行编程,这是一个与 Arduino 非常相似的软件。 用品 物料清单: 为了构建原型,使用了几种材料,在下面的列表中提到了所有这些材料: 3 伺服电机 MG 996R 1 个 Arduino Uno MDF(3 mm 厚) GT2 型同步带(6 mm 间距) 环氧的 螺母和螺栓 3 轴承 第 1 步:原型 第一步是在 CAD 软件中制作模型,在这种情况下,Solid works 是一个非常好的软件,其他选项可以是 Fusion 360 或您喜欢的其他 CAD 软件。步骤 1 中附加的图片是第一个原型,由于我们必须修改的各种错误,我们最终在视频和介绍中得到了模型展示。 为了制作原型,使用了激光切割,我没有任何制造过程的视频,但我有我使用的文件。这个项目必须重要的部分是接口的编码,这样您就可以制作自己的模型并将我们的代码用于您自己的 SCARA 机器人 第 2 步:电机连接 电子设备就像烹饪麦片一样简单。只需按照图片上显示的方式连接所有内容(在主代码中,发送到舵机的信号来自引脚(11、10 和 11)) 第 3 步:取消前向并反转运动学 正向运动学 代码对轨迹的工作方式如下:选择此模式后,必须选择要绘制的形状。您可以在 Line (直线)、Triangle(三角形)、Square (方形) 和 Ellipse (椭圆) 之间进行选择。根据选择,一个变量被改变,然后用作序列中稍后编程的 select 类型的 'case' 参数。由于处理的灵活性,我们可以使用 Windows 和其他作系统已知的命令与界面进行交互,这允许将光标(鼠标)的位置分配给程序中的变量,该变量通过与 Arduino 的连接命令伺服电机以什么顺序驱动什么角度。 可以在伪代码中简化绘制算法: 将值分配给 x1,y1 将值分配给 x2,y2 计算 x1 和 x2 之间的差 计算 y1 和 y2 之间的差 计算向下将通过的点(三角形、正方形、圆) (这两个点使用几何图形) 如果 (botondibujar == true) 在记录的情况下完成序列, 发送到伺服电机的变量保存在 60 个单元的数组中,通过按下“记录”按钮,我们可以保存以任何模式(手动、前进、反向、轨迹)获得的数据,然后在您按下启动按钮时复制变量。 逆向运动学 逆向运动学问题包括为机器人找到必要的输入,以到达其工作区上的某个点。给定该机制,所需位置的可能解数可能是一个无限数。我们构建的机器人是一个具有两个自由度的串行机构。经过几何分析,已经为这种特定机制找到了两个解决方案。图 13.逆向运动学示例其中:θ1 和 θ2 是两个 DoF 串行机构机器人的输入角度,X1 和 X2 是最终手臂中工具平面中的位置。从上图可以看出: 它也存在 elbow UP 配置,但对于编写的程序,它只使用了 elbow DOWN 配置。找到输入角度后,该信息将在直接运动学程序上运行,并且由于伺服系统和皮带的原因,以小于一厘米的误差到达所需位置。 第 4 步:手动、轨迹和学习模式 手动 对于这种模式,你只需要在界面中移动 mause,机器人就会跟随界面的指针,你可以在编程中编程,这是一个很棒的平台 轨迹 对于此模型,我们使用逆运动学的资源,并由客户端请求图形,该图形是: 直线 方阵 三角形 圆 图形可以在界面上绘制所需的形状。轨迹使用逆模式来计算每个图形的线条的每个点,因此当您在绘制作为界面输入的图形后单击播放时,可以轻松跟踪图形 学习模式 学习模式考虑了所有其他模式,即手动、前进、反向和轨迹,因此您可以在界面中进行任何您想要的移动,然后替换为与以前相同的移动,但速度较慢,因为它会重现并尝试更准确地完成它。 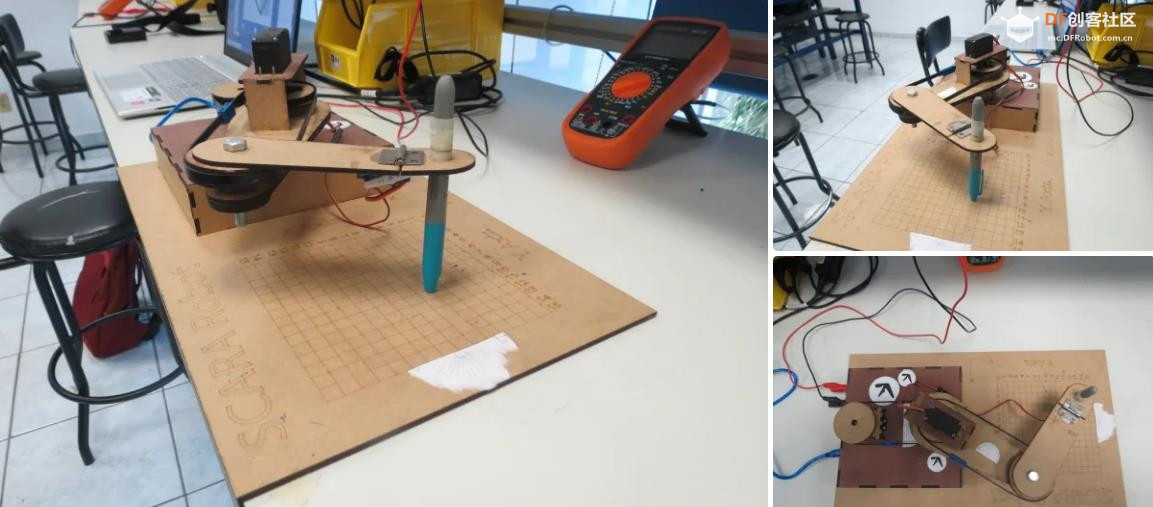 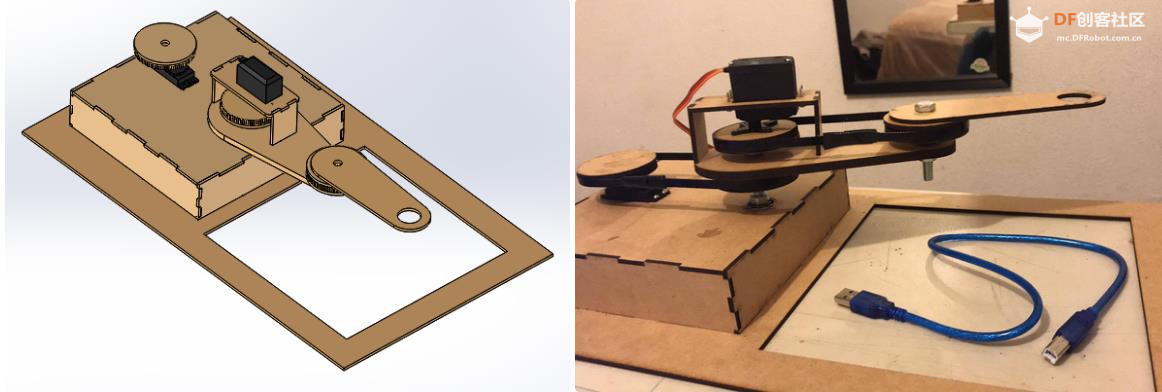 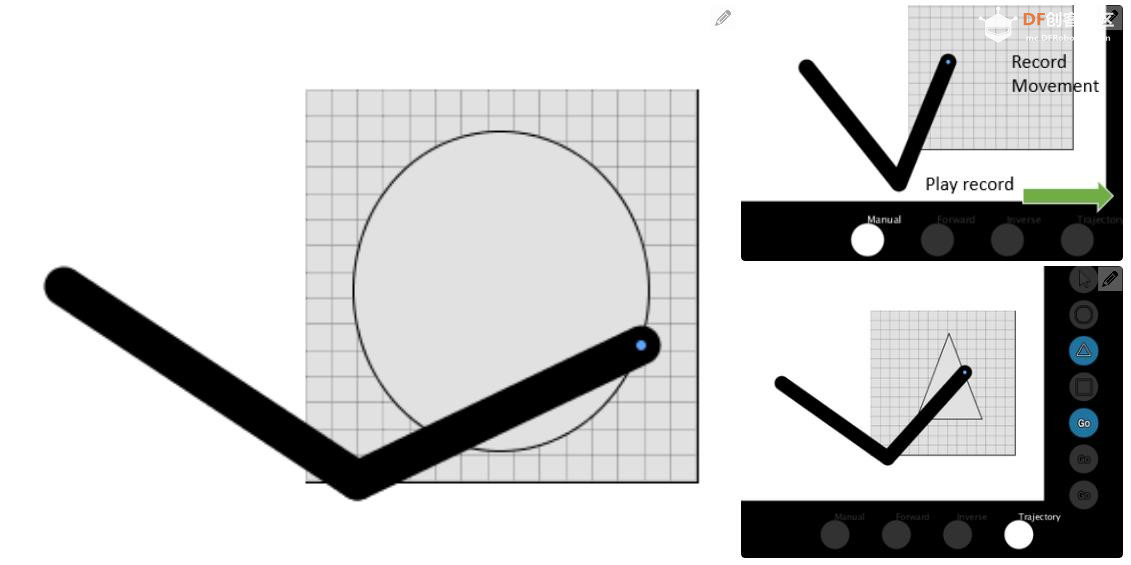 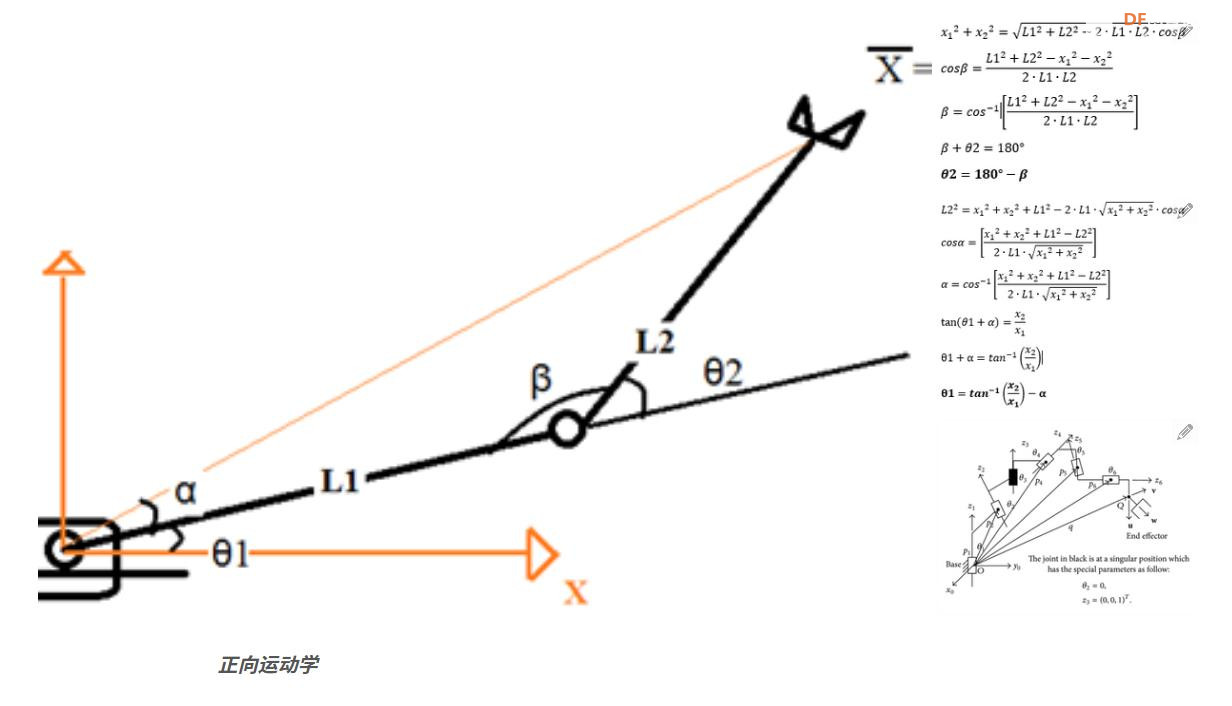 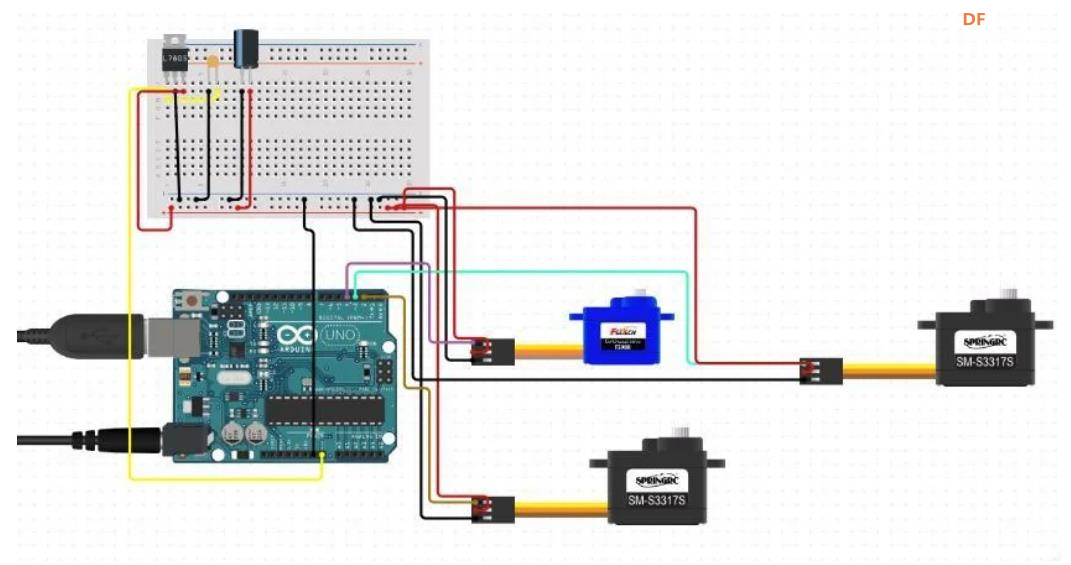 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






