|
978| 0
|
[项目] 【Arduino 动手做】Biped很酷:制作简单的双足类人机器人 |
|
现在连接面包板上的 for 电机。每根电机线的最后一个引脚是棕色的,表示负数。在试验板上,将左侧的所有引脚连接到一个公共负极引脚。同样,将所有中间引脚连接到一个公共 POSITIVE 引脚。这些公共引脚现在分别连接到 Gnd (用于负极)和 +5V (用于正极)。第一个引脚进入 Arduino 的 PWM 引脚。如果您以前将伺服与 arduino 一起使用过,您会发现此步骤非常简单易懂。如果您以前从未使用过 Arduino 和 Servo,我建议您查看以下链接以更好地了解它们的工作原理。 http://arduino.cc/en/reference/servo http://arduino.cc/en/Tutorial/sweep http://playground.arduino.cc/ComponentLib/servo     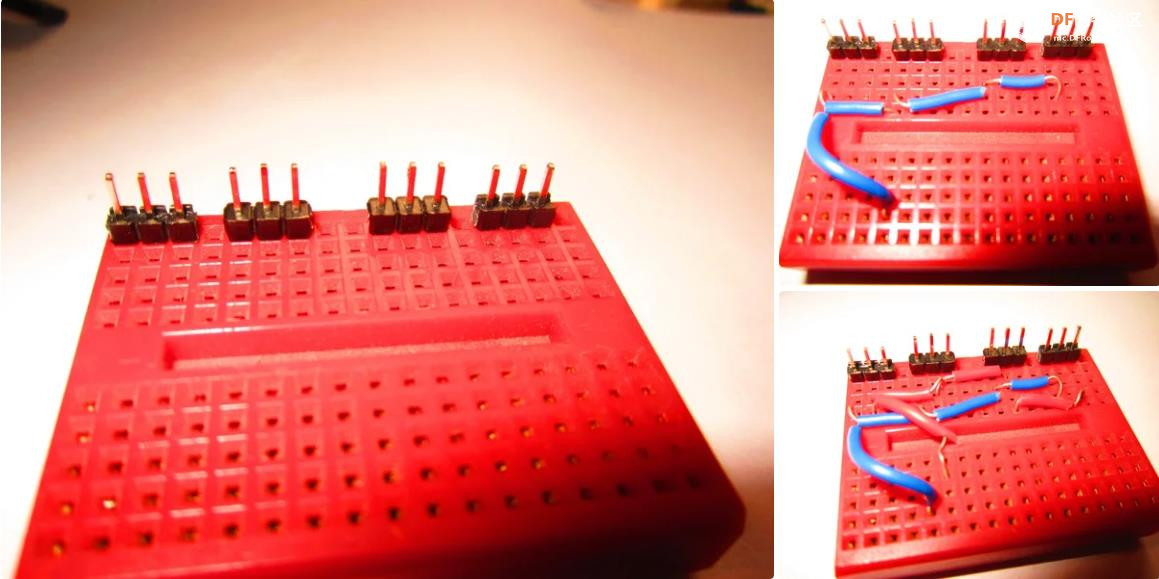  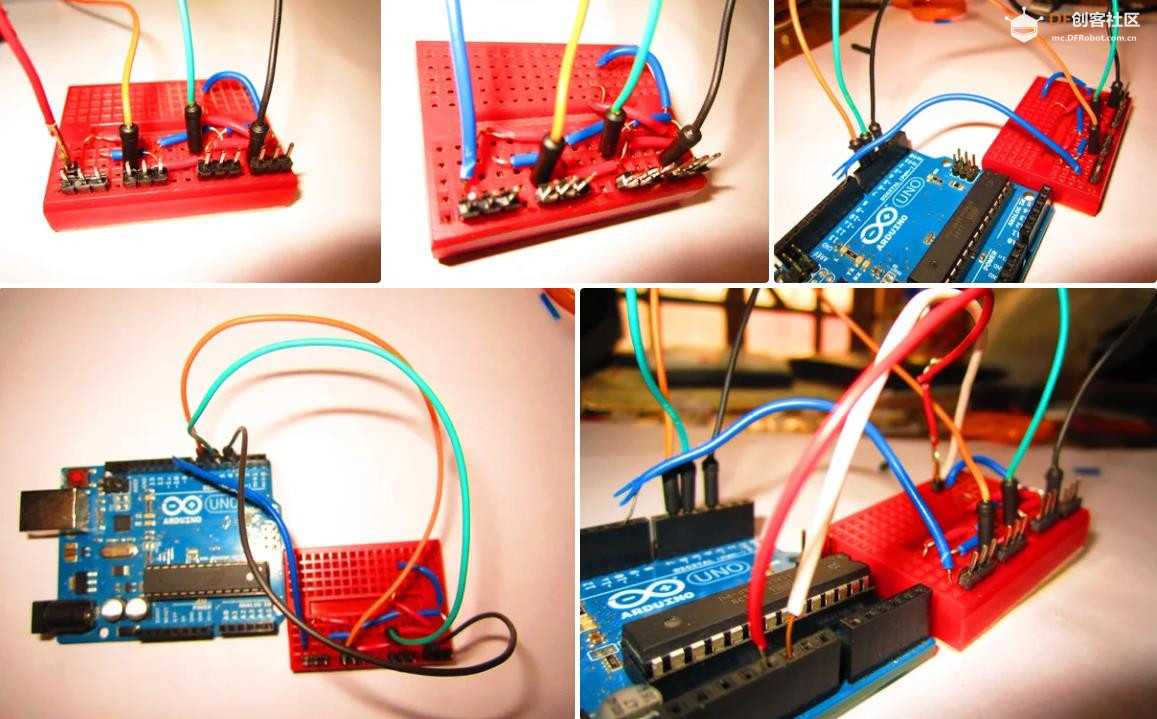 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






