|
1509| 1
|
[项目] 【Arduino 动手做】Theo Jansen 启发的行走机器人昆虫 |
|
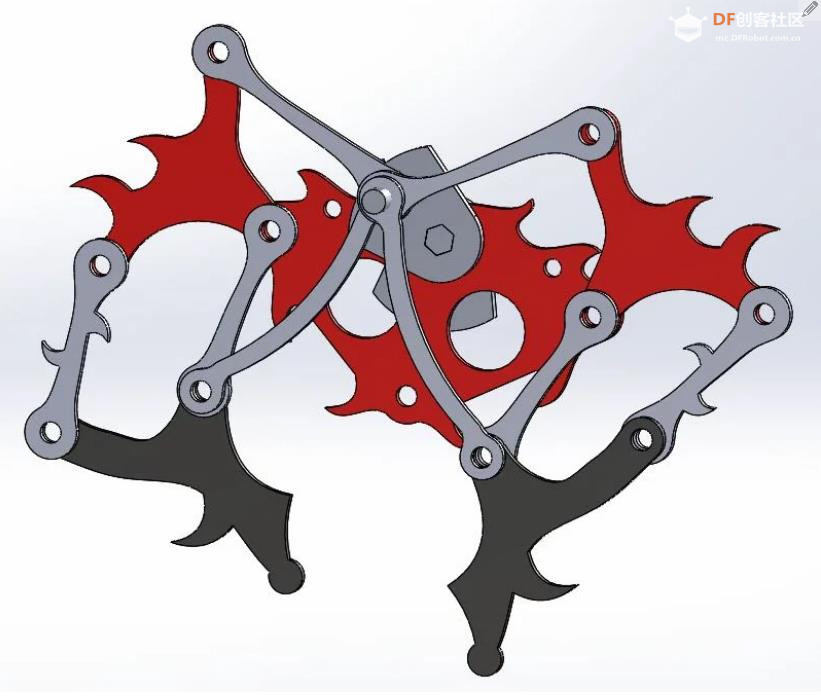
我制作了这个行走的昆虫,灵感来自 Theo Jansen 的创造,他使用遗传算法找到一组联系,形成一条腿,脚在适合行走的轨迹中移动。他想出的东西在移动方式上具有非常有机的外观。 他利用这种联系制作了最美妙的动态雕塑,包括斯兰比斯。我的创作远没有那么令人惊叹——但我想更像是一个谦逊的工程师对他的作品的诠释。 零件都是在我的 CNC 等离子工作台上切割的,这里作为 Instructable 发布,但你同样可以激光切割零件 - 甚至可以用手术刀从提供的 DXF 文件中将它们从厚卡上切割出来。 我最初制作这个是为了参加 2015 年英国纽卡斯尔创客博览会,以展示你可以用我的等离子 CNC 制作的东西,这是我的主要展品。如果有的话,这个机器人比 Plasma Table 受到了更多的关注! 第 1 步:剪腿 正如我在介绍中所说,支腿连杆可以是 CNC 等离子切割、激光切割 - 或者在紧要关头,3D 打印。我在此处附加了原始 Solidworks 零件文件以及 STL 文件以提供帮助。 每个腿段(两条腿)包含13个部分(加上螺母和螺栓)。 1 x 体等离子 体 2 x 肩部等离子 体 2 x 顶部连接等离子 体 2 x 底部连接右等离子 体 2 x 小腿等离子体 2 x 胫骨等离子 体 2 x 足部等离子体 要顺利行走,每侧需要 6 条腿(3 个腿段)。尽管这加起来有很多单独的部分 (78),但它们大多是彼此的重复。 当我切割零件时,固定孔的清晰度不是那么好。如果我再次切割它,我会让等离子标记孔的中心(有关如何执行此作的在线信息)并手动钻孔。切割后我必须将孔钻出正确的尺寸。如果您将零件激光切割或 3D 打印,这将是不必要的。 第 2 步:驱动电机 我用过路虎揽胜 P38 的电动车窗电机,在英国可以买到非常便宜。上图的那个只需 10 英镑。在其他国家/地区,情况可能并非如此,但如果您在 eBay 上查看,您应该能够找到类似的东西。 电机本身是 12v 蜗轮蜗杆传动,减速比约为 50:1 - 它们产生扭矩袋,但仍然具有约 180rpm 的可观速度。 收卷机是理想的选择,因为它们通常有左手和右手两种版本——它们是彼此的镜像。这意味着两个可以背靠背固定,驱动轴将向外指向腿部机构(如果您想构建更传统的机器人,则指向轮子)。 从照片中可以看出,电机有一个驱动齿轮。我发现你可以把它们从轴上撬下来(用一点蛮力!),而不会损坏变速箱。 每个电机都有几个固定孔,我钻出这些孔至 6.5 毫米以接受 M6 螺柱以将电机固定在一起。 第 3 步:曲轴 曲轴都是 3D 打印的。我经历了许多迭代以使它们足够坚固,因为腿部关节中没有轴承,腿部移动会有相当大的阻力。 这是效果最好的版本! 曲轴由两部分重复制成(每个腿段一对)。这两个部件简单地卡在一起,中间有一个 Body 板。 如图所示,您必须将曲柄的两半组装在一起,并在它们之间旋转 120 度。使所有 6 个相同。 3D 打印部件的 STL 文件包含在下一步中。 第 4 步:垫片和其他 3D 打印钻头 还有一些其他杂项部件,包括用于分隔腿段的垫片和电池座夹所连接的垫片。我制作了这些以适应我拥有的 LiPo 3S 电池 - 但您可能必须调整它们以适应您拥有的。 此文件中还包括驱动器适配器和驱动器引脚。驱动适配器将压在电机的花键输出轴上,并在侧面有一个 5 毫米的孔,您可以将 M6 沉头螺钉/螺栓拧入该孔中。它会随着它的运行而切断自己的线! 第 5 步:将它们放在一起! 上面的图片相当不言自明。在最后一张图片中,您可以看到一个提手。这包含在 DXF 文件和 Solidworks 模型中。我本来应该在第一个和后续的组装步骤中包括它 - 但我忘记了! 我最初用 Arduino、电机控制器和大量传感器构建了我的,打算让它自主爬行。经过相当多的工作 - 它做到了。然而,我决定对于一个Maker Faire(想想孩子和过度好奇的成年人)来说这太危险了!腿上的尖刺有点太尖锐了,我可以看到自己处于“不成功不收费”律师的错误端! 相反,我用一个便宜的发射器和接收器以及几个用于遥控车的电子速度控制器来制作无线电控制。现在回想起来,反正 RC 金属昆虫更有趣!  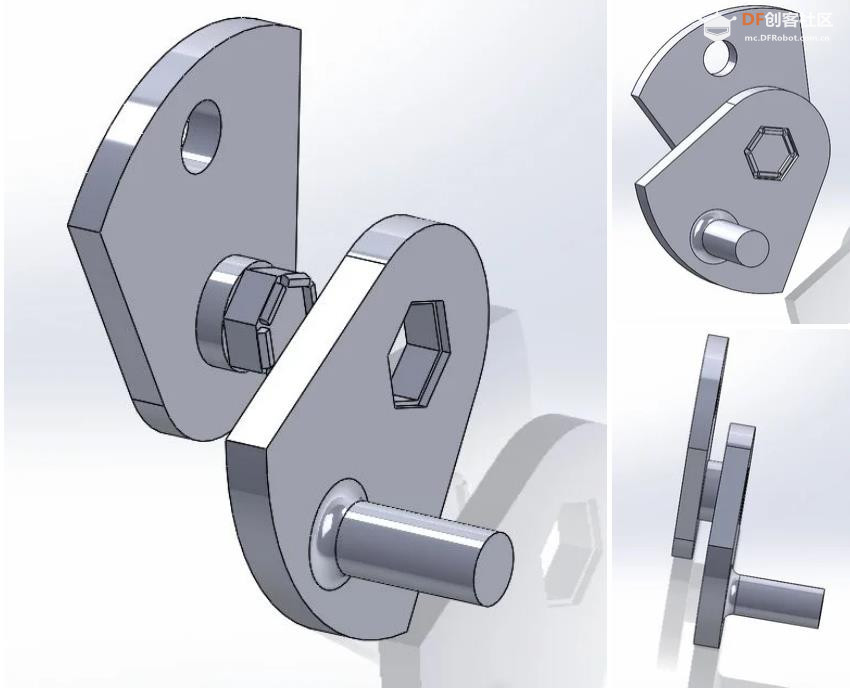 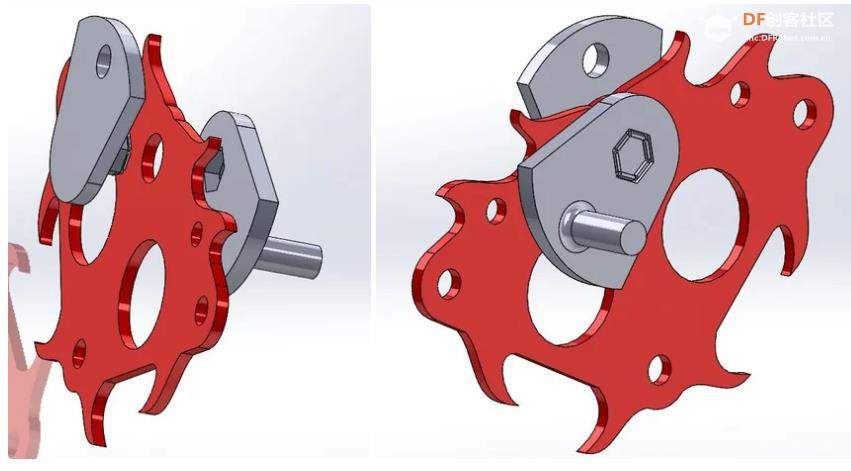 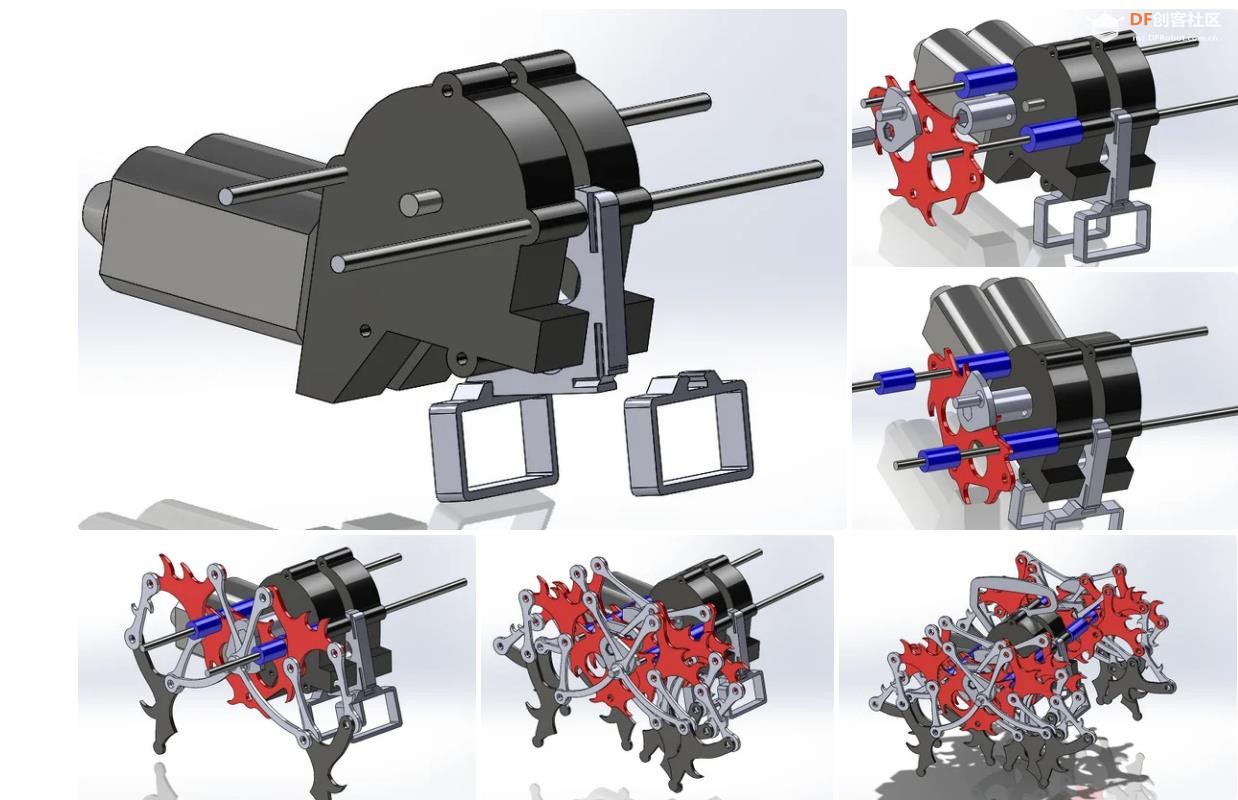 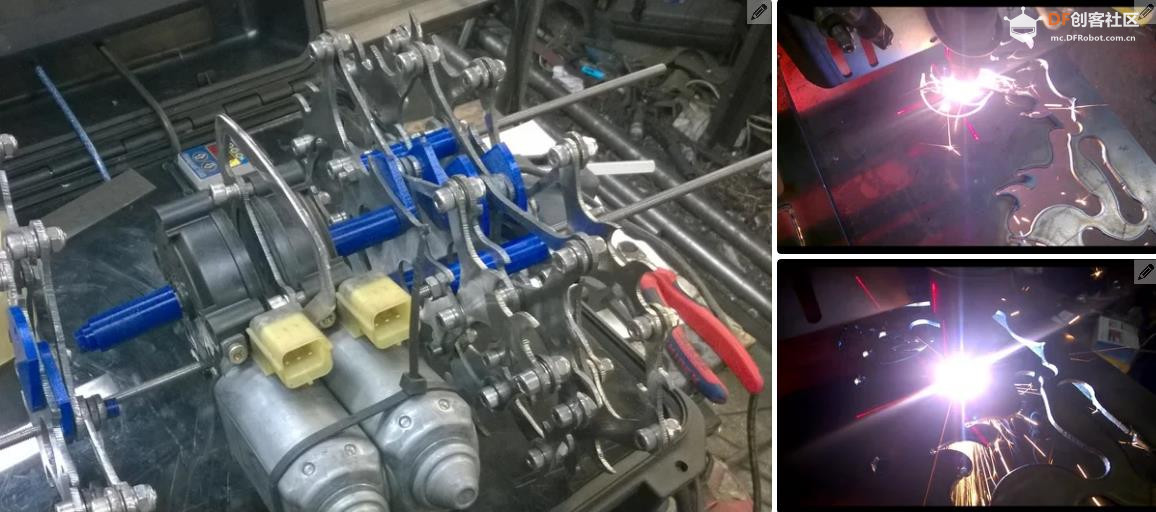 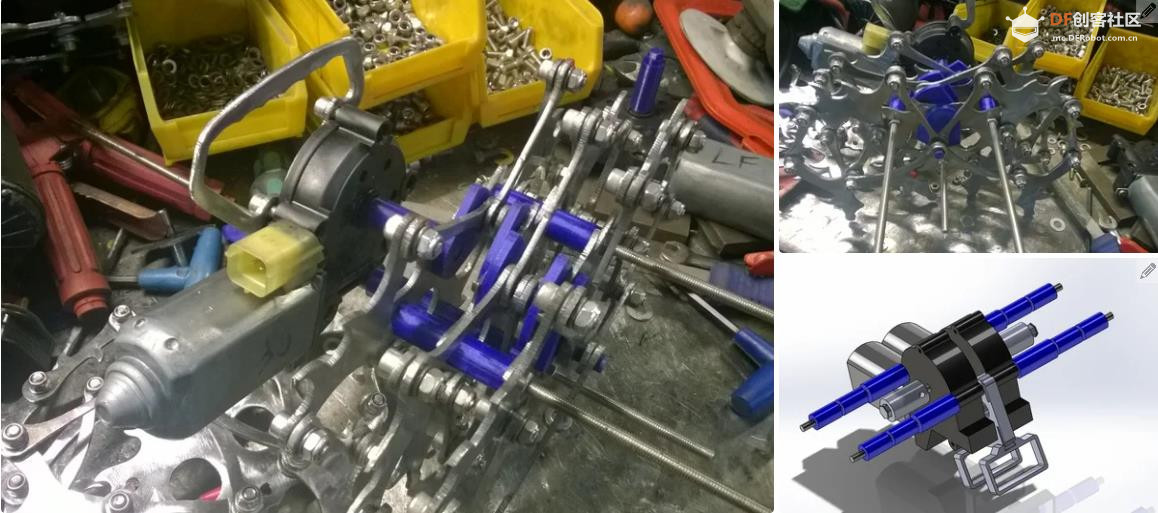 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






